汽车工程 ›› 2022, Vol. 44 ›› Issue (12): 1844-1855.doi: 10.19562/j.chinasae.qcgc.2022.12.006
所属专题: 智能网联汽车技术专题-规划&控制2022年
关龙新1,2,顾祖飞2,张超2,王爱春2,彭晨若2,江会华2,吴晓建1,2( )
)
Longxin Guan1,2,Zufei Gu2,Chao Zhang2,Aichun Wang2,Chenruo Peng2,Huihua Jiang2,Xiaojian Wu1,2()
摘要:
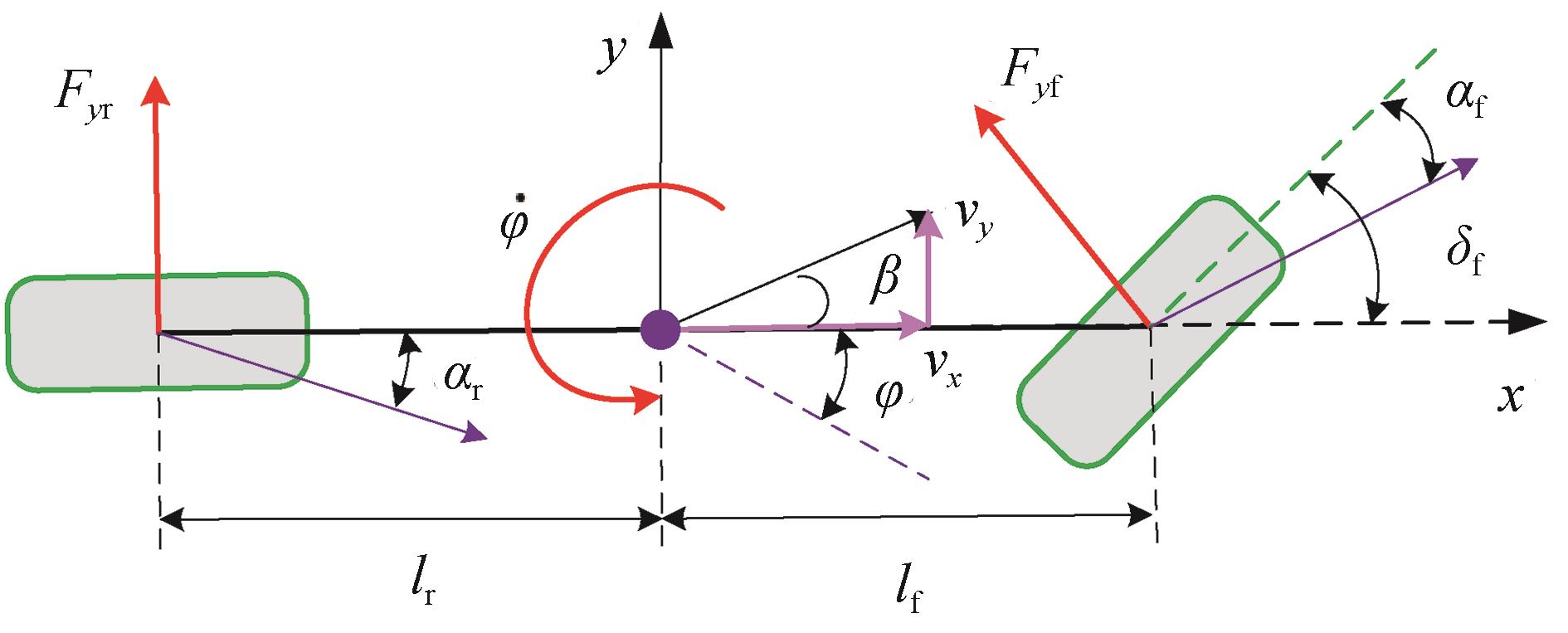
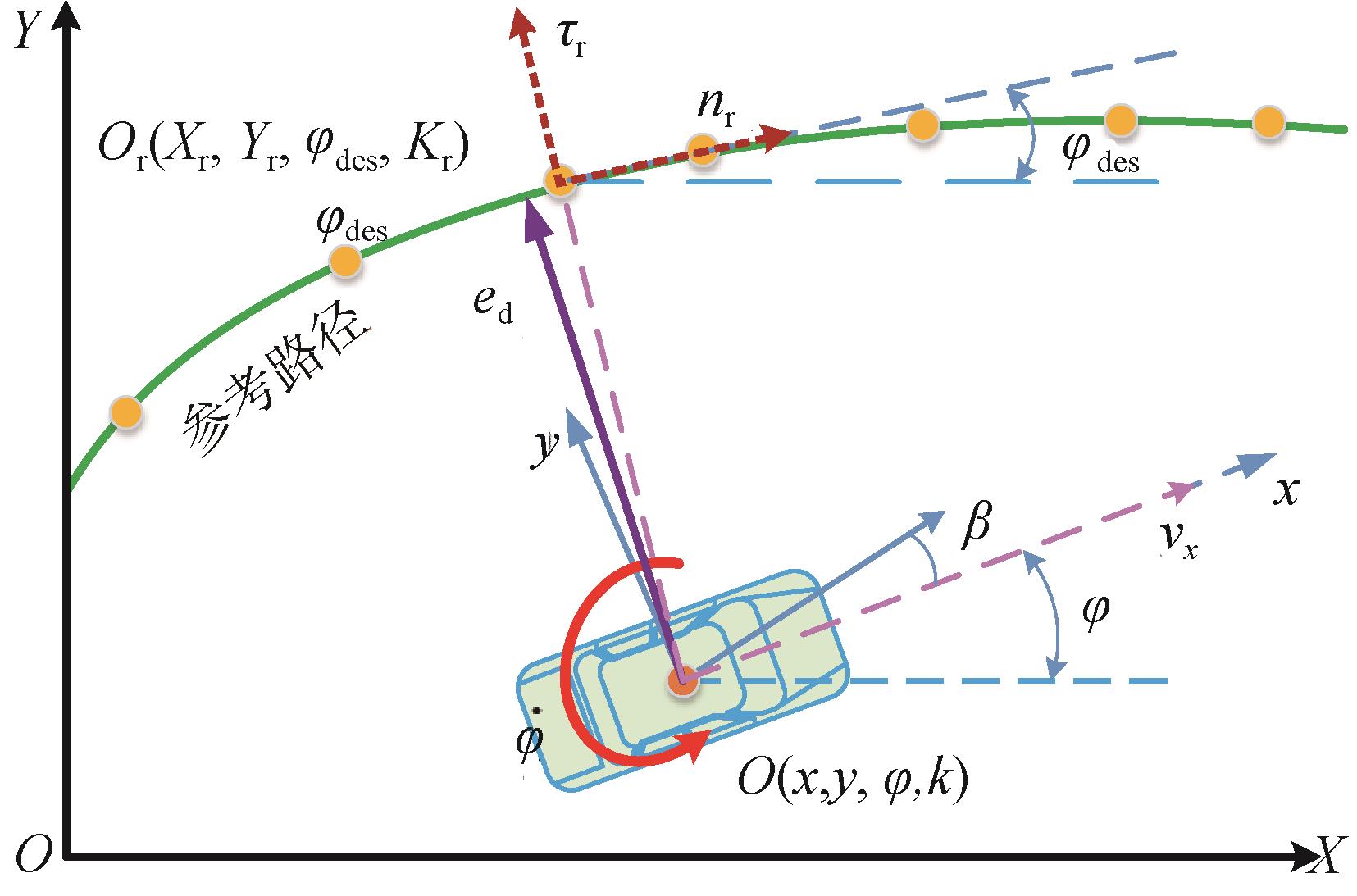
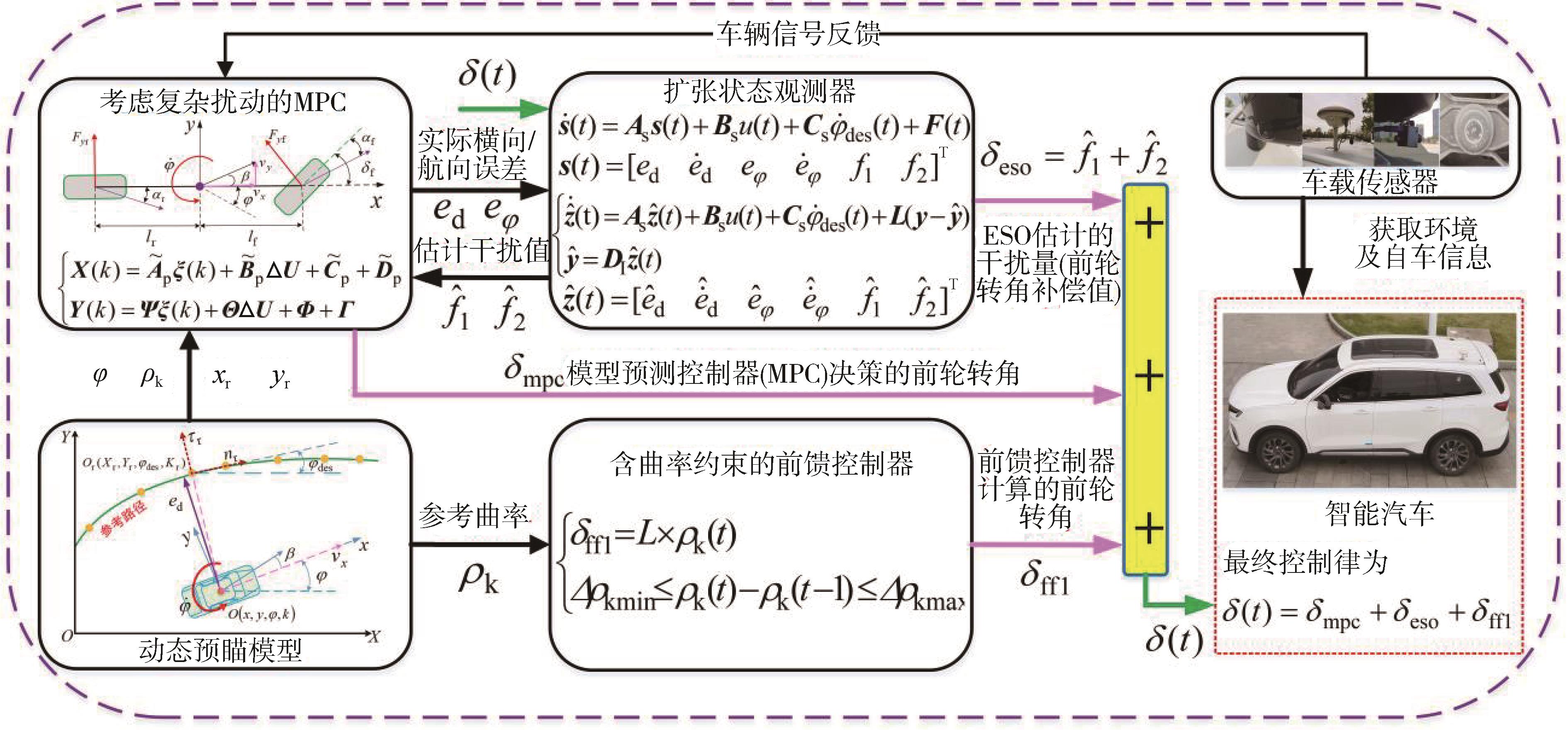
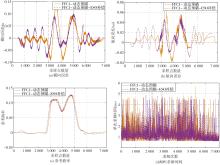
智能车路径跟踪控制面临系统模型简化、参数不确定、执行器与传感器信号延时及道路曲率变化等干扰,将产生系统扰动误差,导致跟踪精度降低。本文针对性提出一种考虑跟踪系统复杂扰动的模型预测控制方法(model predictive control, MPC),首先以单轨车辆动力学模型为基础建立模型预测跟踪系统,并依据实时规划的路径和速度信息设计预瞄距离动态调整方法,获取最佳预瞄点,以改善智能车底盘执行器与传感器信号延时扰动问题;而后引入扩张状态观测器(extended state observer,ESO)实时估计因简化车辆模型对系统产生的未知扰动量并用于前馈补偿;同时,考虑道路参考曲率变化对系统产生的确定性稳态扰动,设计一种含曲率约束的前馈控制(feed-forward control,FFC)方法用于消除该干扰;最终形成MPC控制器反馈输入、ESO抗干扰补偿输入及FFC前馈输入相叠加的转向角控制律。最后,以某品牌智能车平台在低速园区场景进行了实车测试对比分析,验证了本文所改进的融合扰动补偿的模型预测控制方法具备可行性和优越性。