汽车工程 ›› 2023, Vol. 45 ›› Issue (6): 1040-1049.doi: 10.19562/j.chinasae.qcgc.2023.06.014
所属专题: 底盘&动力学&整车性能专题2023年
陈建华,徐中明,张志飞( )
)
收稿日期:2022-10-25
修回日期:2022-12-22
出版日期:2023-06-25
发布日期:2023-06-16
通讯作者:
张志飞
E-mail:z.zhang@cqu.edu.cn
基金资助:
Jianhua Chen,Zhongming Xu,Zhifei Zhang()
Received:2022-10-25
Revised:2022-12-22
Online:2023-06-25
Published:2023-06-16
Contact:
Zhifei Zhang
E-mail:z.zhang@cqu.edu.cn
摘要:
为实现车辆在非匀速行驶时的悬架相对速度和簧上绝对速度估计,同时减小车载传感器的数量,构造了不考虑车轮动力学、以车轮垂直速度为输入的车辆悬架系统简化模型,设计了一种基于速度自适应轴距预瞄的结合卡尔曼滤波算法估计整车悬架相对速度和簧上绝对速度的方法。仿真结果表明,在车辆非匀速行驶通过低频正弦路面、减速带、凹坑以及典型随机路面时,所提出的方法可以准确估计车辆的悬架相对速度和簧上绝对速度,且速度自适应轴距预瞄的引入减少了传感器的使用数量。
陈建华,徐中明,张志飞. 基于轴距预瞄的非匀速工况车辆悬架状态估计[J]. 汽车工程, 2023, 45(6): 1040-1049.
Jianhua Chen,Zhongming Xu,Zhifei Zhang. Suspension State Estimation Based on Wheelbase Preview at Variable Speed[J]. Automotive Engineering, 2023, 45(6): 1040-1049.

图1
车辆悬架物理模型"
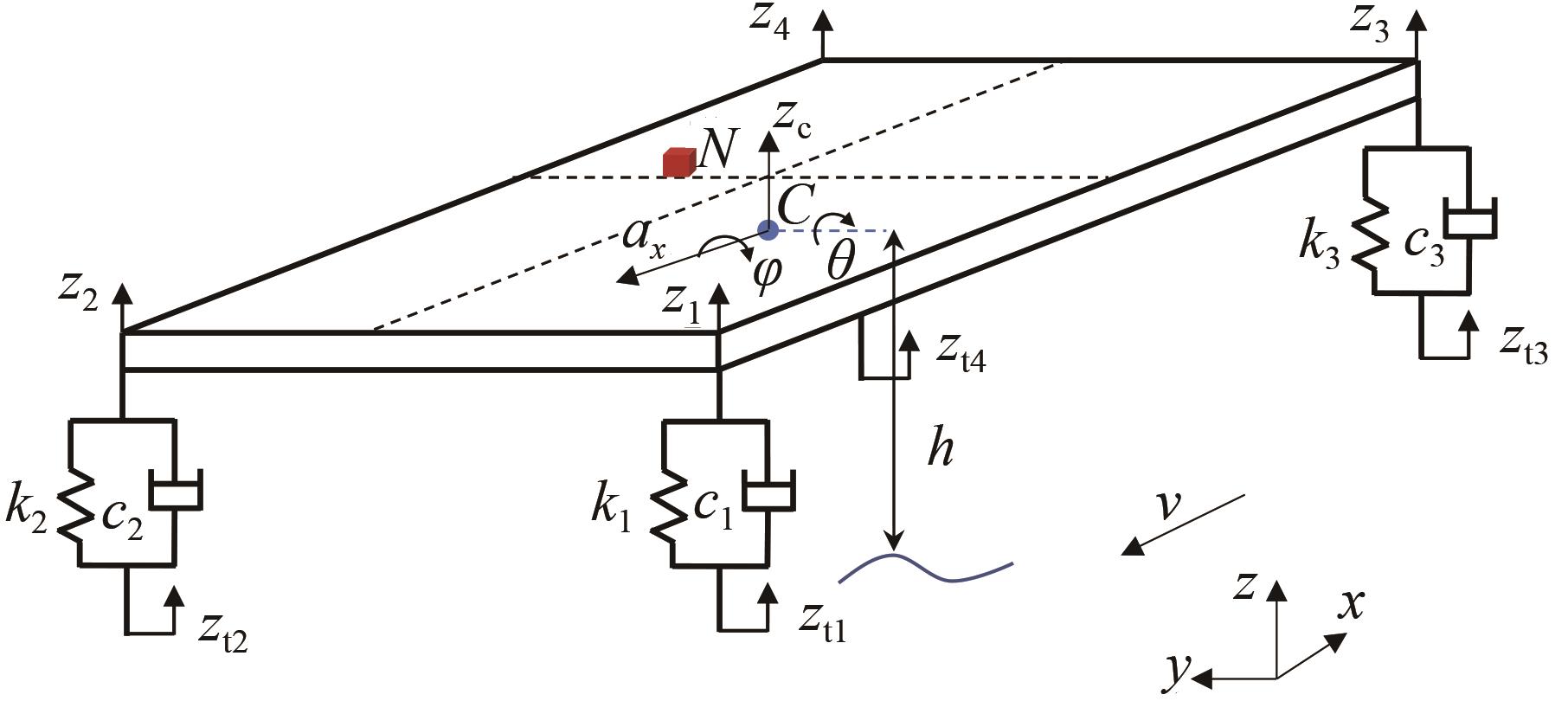
表1
车辆物理参数"
| 参数 | 物理意义 | 数值 |
|---|---|---|
| mc /kg | 簧载质量 | 1 399.6 |
| 簧载质量俯仰转动惯量 | 985.7 | |
| 簧载质量侧倾转动惯量 | 320.9 | |
| 前悬架刚度 | 33 999 | |
| 后悬架刚度 | 25 261 | |
| 前悬架阻尼 | 1 057.4 | |
| 后悬架阻尼 | 700.3 | |
| 质心到左轮距离 | 0.744 | |
| 质心到右轮距离 | 0.776 | |
| 质心到前轴距离 | 1.297 | |
| 质心到后轴距离 | 1.263 | |
| IMU安装点到左轮距离 | 1.27 | |
| IMU安装点到右轮距离 | 0.25 | |
| IMU安装点到前轴距离 | 2.12 | |
| IMU安装点到后轴距离 | 0.44 | |
| 质心高度 | 0.432 |

图2
整体流程图"
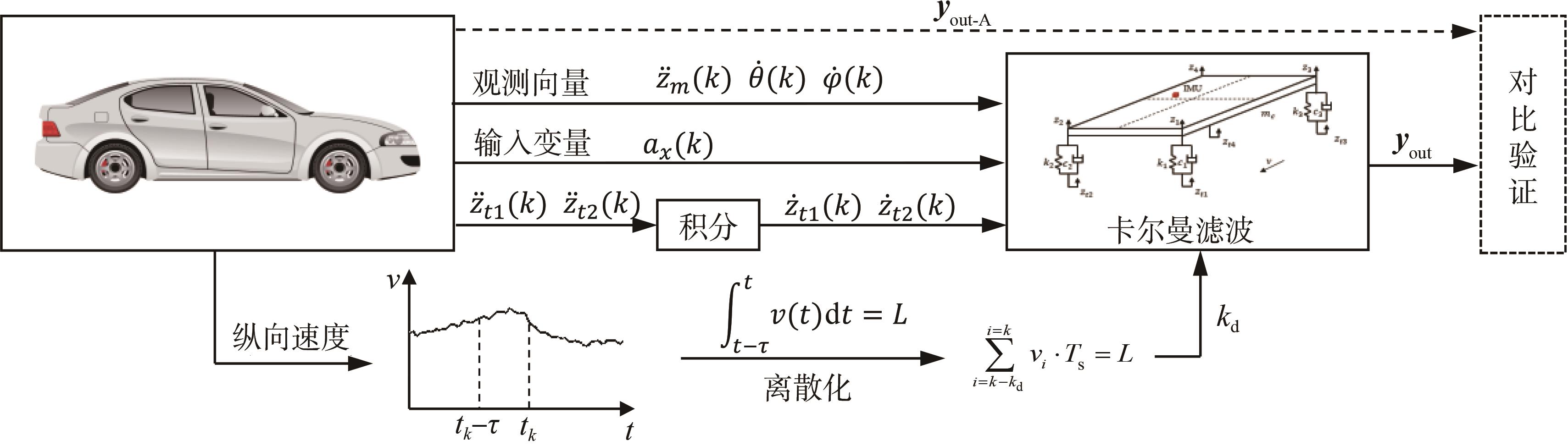
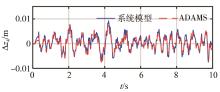
图3
后右悬架相对位移"

表2
过程噪声误差"
| 状态量 | Q | 状态量 | Q |
|---|---|---|---|
| 2.7 × 10-5 | 1.1 × 10-6 | ||
| 9.0 × 10-6 | 9.8 × 10-7 | ||
| 3.4 × 10-4 | 9.0 × 10-7 | ||
| 1.0 × 10-6 |
表3
测量噪声误差"
| 观测量 | 误差幅值 | R |
|---|---|---|
| 0.005 m?s-2 | 2.5 × 10-5 | |
| 0.003 rad?s-1 | 9.0 × 10-6 | |
| 0.003 rad?s-1 | 9.0 × 10-6 |
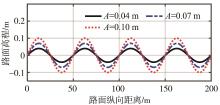
图4
幅值不同的低频正弦路面"
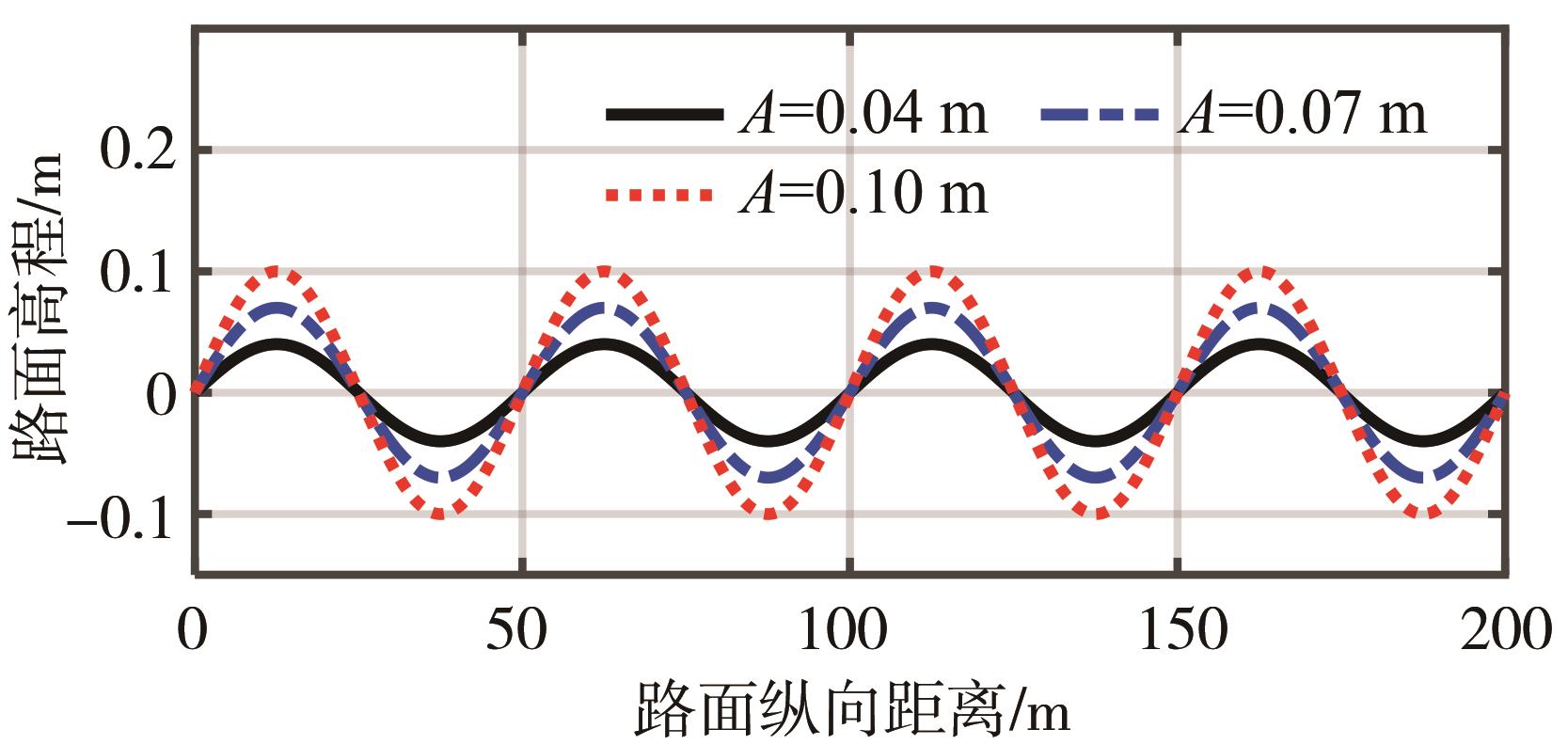
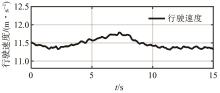
图5
通过正弦路面的车辆行驶速度"
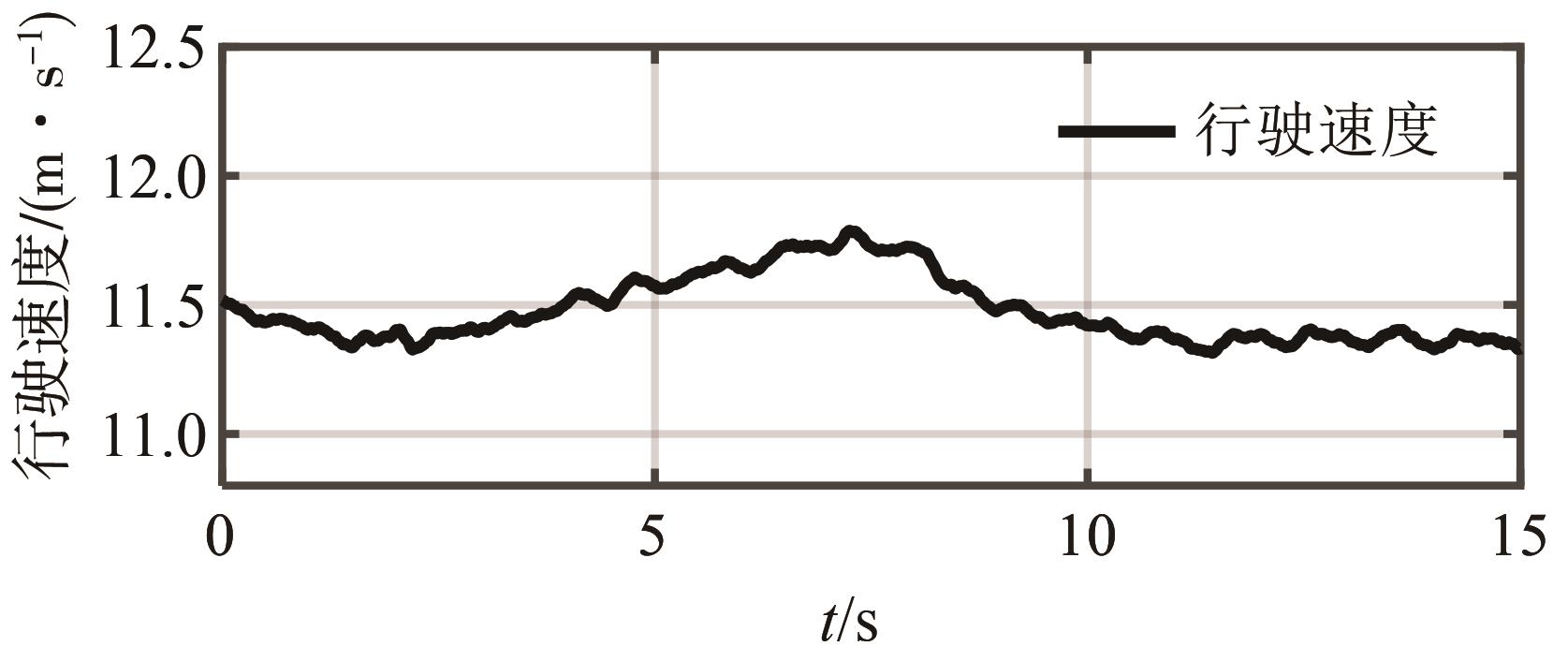

图6
车辆通过减速带的速度"
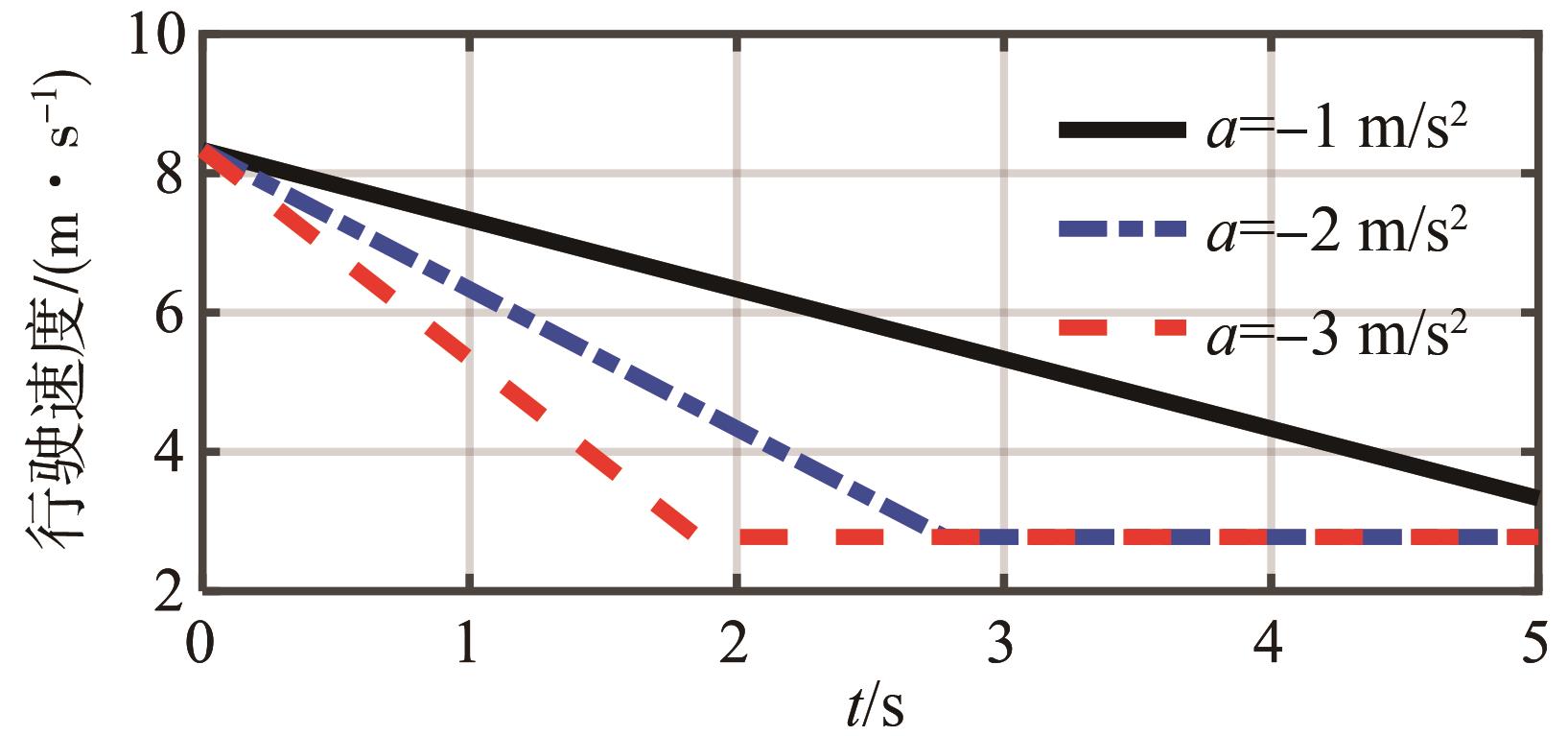
表4
车辆运行工况"
| 工况 | 路面类型 | 路面频率n/ 障碍宽度 | 幅值 | 运行速度/加速度 |
|---|---|---|---|---|
| 1 | 正弦 | 0.02 m-1 | 0.04 m | |
| 2 | 正弦 | 0.02 m-1 | 0.07 m | |
| 3 | 正弦 | 0.02 m-1 | 0.10 m | |
| 4 | 减速带 | 0.4 m | 0.05 m | -1 m?s-2 |
| 5 | 减速带 | 0.4 m | 0.05 m | -2 m?s-2 |
| 6 | 减速带 | 0.4 m | 0.05 m | -3 m?s-2 |
| 7 | 三角凹坑 (左侧) | 0.4 m | 0.04 m | -1 m?s-2 |
| 8 | B级随机路面 |
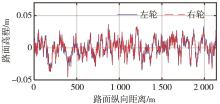
图7
B级随机路面"
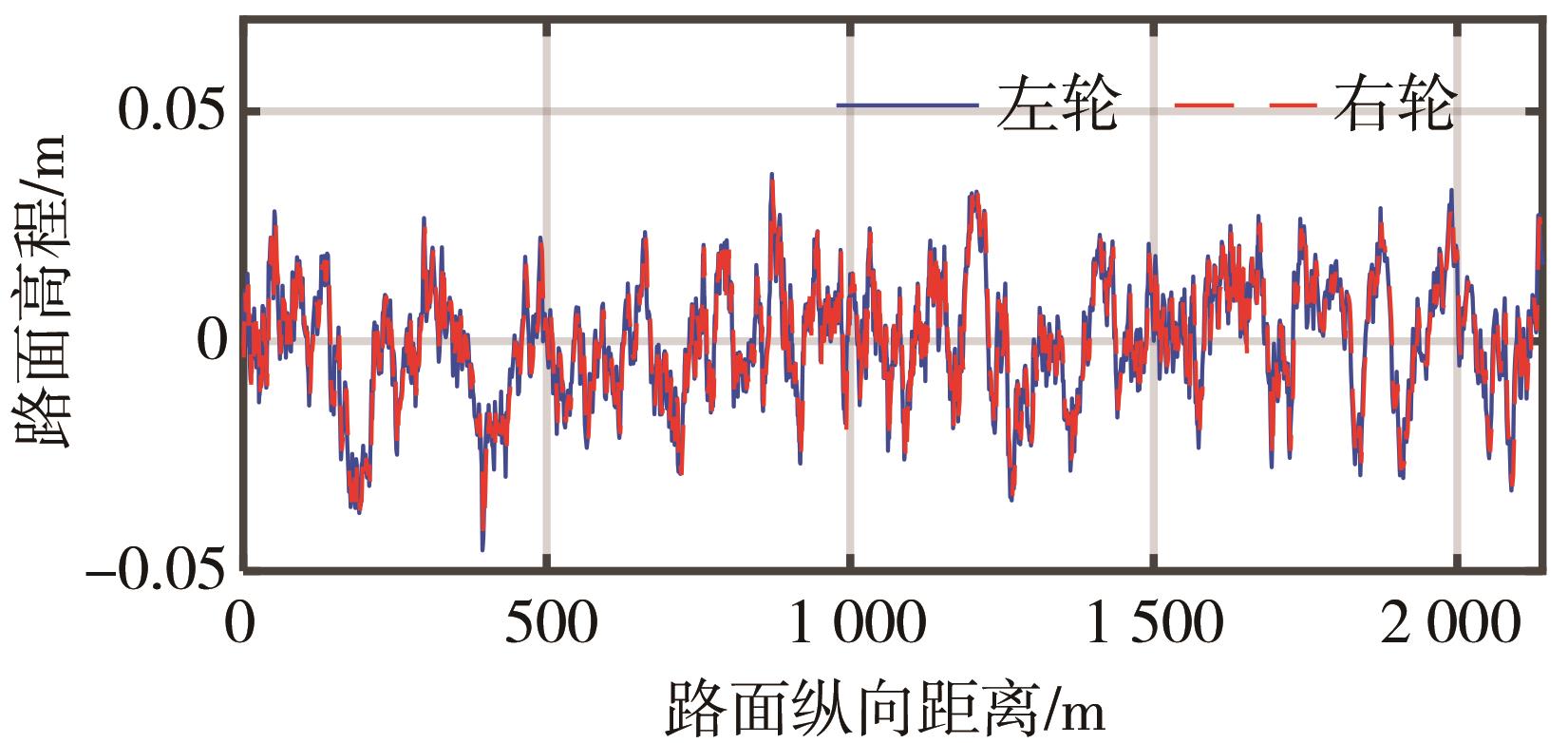
图8
通过随机路面的速度"
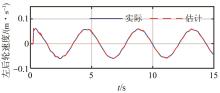
图9
左后轮垂直速度估计(工况1)"
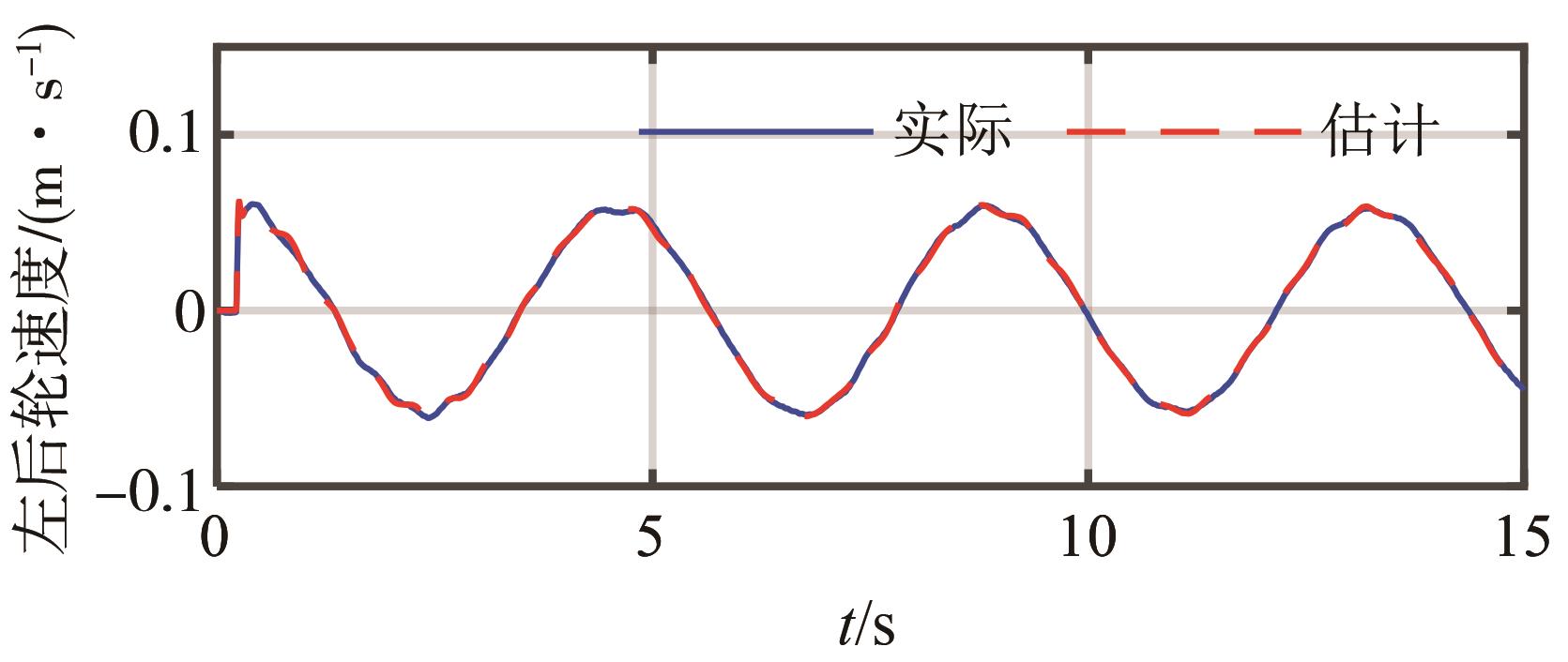

图10
低频正弦路面(工况1)车辆左侧状态估计结果"
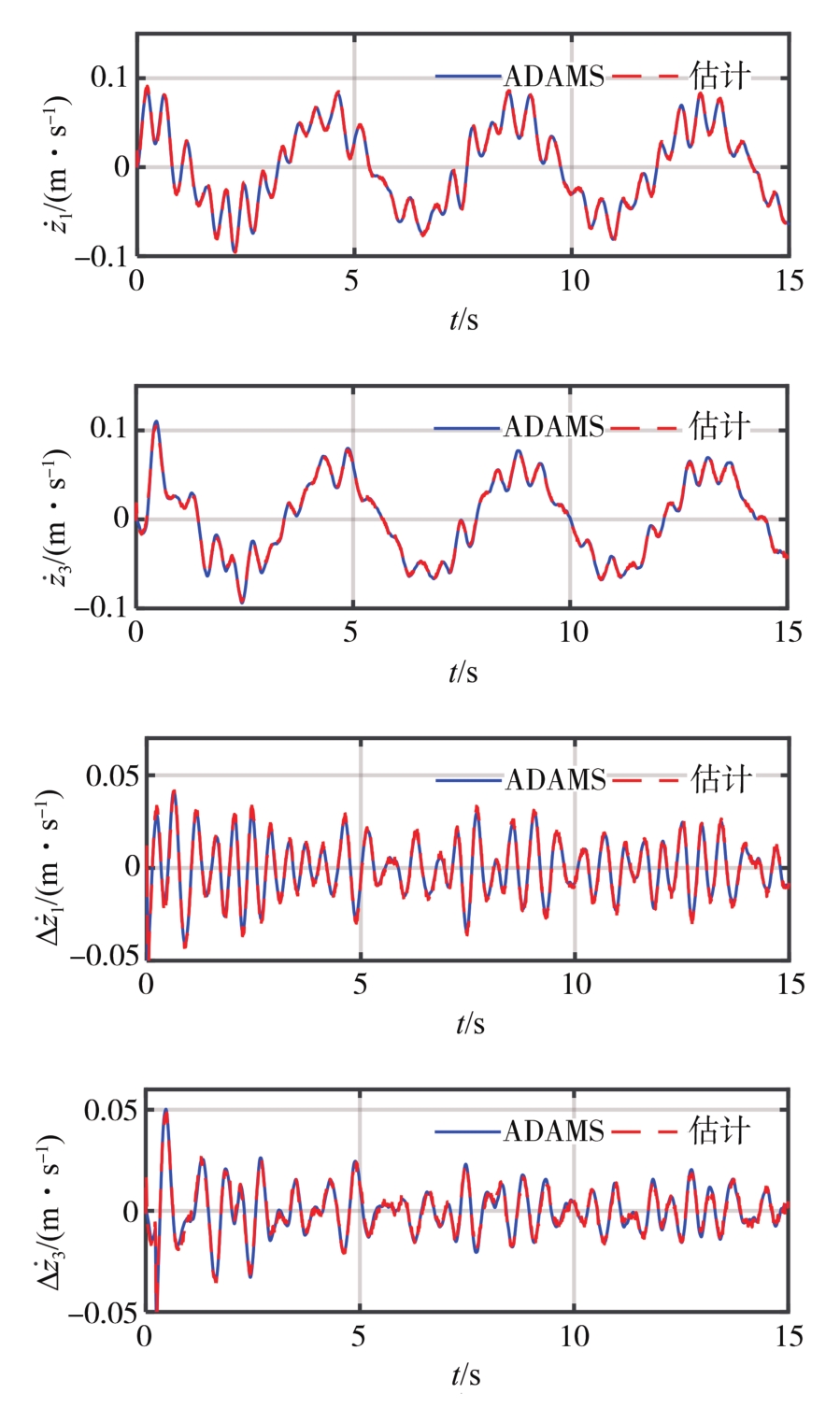
表5
正弦路面状态估计相对误差均方根值 %"
| 工况 | 1 | 2 | 3 |
|---|---|---|---|
| 0.79 | 0.70 | 0.70 | |
| 2.90 | 2.70 | 2.67 | |
| 1.21 | 1.33 | 1.24 | |
| 0.95 | 1.11 | 1.09 | |
| 0.15 | 0.04 | 0.13 | |
| 0.04 | 0.03 | 0.03 | |
| 1.21 | 1.32 | 0.05 | |
| 0.94 | 1.13 | 1.12 |

图11
减速带路面(工况4)车辆左侧状态估计结果"
表6
减速带路面状态估计相对误差均方根值 %"
| 工况 | 4 | 5 | 6 |
|---|---|---|---|
| 1.69 | 1.38 | 1.28 | |
| 2.35 | 0.72 | 1.76 | |
| 1.78 | 2.40 | 1.12 | |
| 0.98 | 3.26 | 1.32 | |
| 1.15 | 1.36 | 0.59 | |
| 2.45 | 1.15 | 0.60 | |
| 1.74 | 2.33 | 1.11 | |
| 0.97 | 3.89 | 1.39 |

图12
凹坑路面(工况7)悬架状态估计结果"

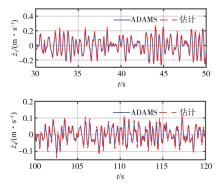
图13
随机路面(工况8)车辆簧上速度估计结果"

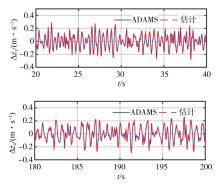
图14
随机路面(工况8)悬架相对速度估计结果"
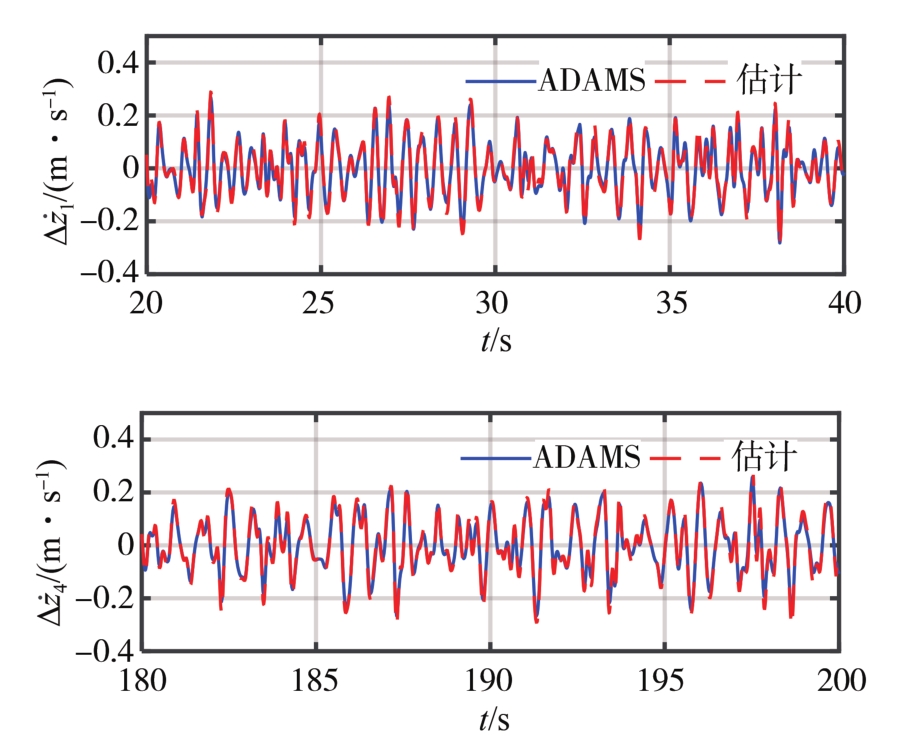
表7
质心位置不准确的状态(z˙1)估计相对误差"
| -15% | -10% | -5% | 0 | 10% | 15% | |
|---|---|---|---|---|---|---|
| -15% | 3.55% | 3.35% | 1.44% | 0.93% | 1.28% | 1.35% |
| -10% | 3.35% | 1.02% | 1.58% | 1.24% | 3.39% | 2.45% |
| -5% | 2.14% | 0.69% | 4.58% | 2.06% | 3.40% | 2.86% |
| 0 | 3.13% | 2.90% | 1.46% | 2.24% | 1.29% | 1.27% |
| 10% | 3.76% | 2.02% | 1.31% | 1.72% | 1.66% | 1.72% |
| 15% | 2.91% | 2.35% | 2.41% | 2.57% | 3.27% | 1.63% |
表8
质心位置不准确的状态(?z˙4)估计相对误差"
| -15% | -10% | -5% | 0 | 10% | 15% | |
|---|---|---|---|---|---|---|
| -15% | 2.19% | 2.26% | 1.08% | 0.80% | 0.88% | 0.65% |
| -10% | 2.68% | 1.81% | 1.64% | 1.26% | 1.30% | 3.21% |
| -5% | 1.80% | 2.09% | 3.14% | 1.57% | 2.47% | 1.40% |
| 0 | 1.10% | 3.22% | 4.03% | 1.44% | 3.19% | 1.47% |
| 10% | 3.49% | 1.38% | 3.02% | 3.17% | 4.73% | 2.87% |
| 15% | 1.49% | 2.16% | 1.59% | 3.29% | 1.24% | 2.62% |
| 1 | WEICHAO S, YE Z, JINFU L, et al. Active suspension control with frequency band constraints and actuator input delay [J]. IEEE Transactions on Industrial Electronics, 2012, 59(1): 530-537. |
| 2 | FEI Z, WANG X, LIU M, et al. Reliable control for vehicle active suspension systems under event-triggered scheme with frequency range limitation [J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(3): 1630-1641. |
| 3 | PAPAIOANNOU G, KOULOCHERIS D, VELENIS E. Skyhook control strategy for vehicle suspensions based on the distribution of the operational conditions [J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(10-11): 2776-2790. |
| 4 | 杨艺,陈龙,汪若尘,等.车辆半主动悬架广义天棚理论控制研究[J].振动与冲击,2021,40(22):66-74. |
| YANG Yi, CHEN Long, WANG Ruochen, et al. Vehicle semi-active suspension theory of generalized canopy control study [J]. Journal of Vibration and Shock, 2021, 40 (22) : 66-74. | |
| 5 | SAVARESI S M, SILANI E, BITTANTI S. Acceleration-driven-damper (ADD): an optimal control algorithm for comfort-oriented semiactive suspensions [J]. J Dyn Syst Meas Control-Trans ASME, 2005, 127(2): 218-229. |
| 6 | HU Y, CHEN M Z Q, SUN Y. Comfort-oriented vehicle suspension design with skyhook inerter configuration [J]. Journal of Sound and Vibration, 2017, 405: 34-47. |
| 7 | DA PONTE CAUN R, ASSUNçãO E, MINHOTO TEIXEIRA M C. H2/H∞ formulation of LQR controls based on LMI for continuous-time uncertain systems [J]. International Journal of Systems Science, 2020, 52(3): 612-634. |
| 8 | BREZAS P, SMITH M C. Linear quadratic optimal and risk-sensitive control for vehicle active suspensions [J]. IEEE Transactions on Control Systems Technology, 2014, 22(2): 543-556. |
| 9 | FU Z J, DONG X Y. H∞optimal control of vehicle active suspension systems in two time scales [J]. Automatika, 2021, 62(2): 284-292. |
| 10 | BOLANDHEMMAT H. Distributed sensing and observer design for vehicles state estimation [D]; University of Waterloo (Canada), 2009. |
| 11 | KALMAN R E. A new approach to linear filtering and prediction problems [J]. Journal of Basic Engineering, 1960, 82(1): 35-45. |
| 12 | 卢凡,陈思忠,刘畅,等.基于Kalman滤波器的车辆振动速度估计[J].振动与冲击,2014,33(13):111-116. |
| LU Fan, CHEN Sizhong, LIU Chang, et al. Vehicle vibration velocity estimation based on Kalman filter [J]. Journal of Vibration and Shock, 2014 (13) : 111-116. | |
| 13 | WANG Z, DONG M, QIN Y, et al. Suspension system state estimation using adaptive Kalman filtering based on road classification [J]. Vehicle System Dynamics, 2016, 55(3): 371-398. |
| 14 | KIM G W, KANG S W, KIM J S, et al. Simultaneous estimation of state and unknown road roughness input for vehicle suspension control system based on discrete Kalman filter [J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 234(6): 1610-1622. |
| 15 | 刘浪,张志飞,鲁红伟,等.基于增广卡尔曼滤波并考虑车辆加速度的路面不平度识别[J].汽车工程,2022,44(2):247-255,297. |
| LIU Lang, ZHANG Zhifei, LU Hongwei, et al. Based on augmented kalman filter and considering the vehicle acceleration of road roughness recognition [J]. Automobile Engineering, 2022, 44 (2) : 247-255, 297. | |
| 16 | 张亮修,周静,成强,等.考虑路面不平输入的车辆侧倾状态估计及主动控制[J].振动与冲击,2018,37(5):133-141, 154. |
| ZHANG Liangxiu, ZHOU Jing, CHENG Qiang, et al. Consider uneven road input and active control of vehicle roll state estimation [J]. Journal of Vibration and Shock, 2018, 5 (5) : 133-141, 154. | |
| 17 | THEUNISSEN J, TOTA A, GRUBER P, et al. Preview-based techniques for vehicle suspension control: a state-of-the-art review [J]. Annual Reviews in Control, 2021, 51: 206-235. |
| 18 | JEONG K, CHOI S B. Vehicle suspension relative velocity estimation using a single 6-D IMU sensor [J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7309-7318. |
| 19 | KWON B-S, KANG D, YI K. Wheelbase preview control of an active suspension with a disturbance-decoupled observer to improve vehicle ride comfort [J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 234(6): 1725-1745. |
| 20 | 张立军,张天侠.车辆四轮相关路面非平稳随机输入通用时频模型[J].振动与冲击,2008(7):75-78,187. |
| ZHANG Lijun, ZHANG Tianxia. Four wheels correlated pavement general time-frequency nonstationary random input model [J]. Journal of Vibration and Shock, 2008 (7) : 75-78, 187. |
| [1] | 张念忠,宋强,王冠峰,王明生. 车用永磁同步电机无电流传感器控制研究[J]. 汽车工程, 2024, 46(2): 281-289. |
| [2] | 邓斌, 李维汉, 吴迪, 张冰战, 赵韩. 基于KFESO的四轮主动转向积分滑模控制[J]. 汽车工程, 2024, 46(1): 100-108. |
| [3] | 高翔, 张祥, 魏东旭, 牛军川, 贺磊. 馈能式半主动悬架振动自适应最优容错控制[J]. 汽车工程, 2024, 46(1): 92-99. |
| [4] | 李勇滔,孙晨旭,郑伟光,许恩永,李育方,王善超. 基于毫米波雷达与视觉融合的碰撞预警[J]. 汽车工程, 2023, 45(9): 1666-1676. |
| [5] | 胡明辉,朱广曜,刘长贺,唐国峰. 考虑迟滞特性的卡尔曼滤波和门控循环单元神经网络的锂离子电池SOC联合估计[J]. 汽车工程, 2023, 45(9): 1688-1701. |
| [6] | 吴骁, 史文库, 陈志勇. 基于交互式多模型卡尔曼滤波的主动悬架控制[J]. 汽车工程, 2023, 45(7): 1200-1211. |
| [7] | 孙晓强, 王玉麟, 胡伟伟, 蔡英凤, 陈龙, Wong Pak Kin. 基于轮胎分段仿射辨识模型的车辆行驶状态估计策略研究[J]. 汽车工程, 2023, 45(7): 1212-1221. |
| [8] | 浦震峰, 唐亮, 上官文斌, 王伟玮, 蒋开洪. 基于多传感器信息的汽车低速车速估计方法[J]. 汽车工程, 2023, 45(7): 1235-1243. |
| [9] | 李子先,潘世举,朱愿,何滨兵,徐友春. 基于状态反馈和预瞄前馈的智能车半主动悬架控制[J]. 汽车工程, 2023, 45(5): 735-745. |
| [10] | 王春,唐滔,张永志. 考虑环境温度影响的超级电容SOC加权融合估计方法[J]. 汽车工程, 2023, 45(4): 627-636. |
| [11] | 王刚,李昆鹏,景晖,刘溯奇. 基于Q学习的整车主动悬架免参数H∞控制[J]. 汽车工程, 2023, 45(12): 2260-2271. |
| [12] | 胡杰,陈锐鹏,张志豪,向博文,刘昊岩,朱琪,郭启翔. 基于RMPC的自动驾驶货车路径跟踪控制[J]. 汽车工程, 2023, 45(11): 2092-2103. |
| [13] | 张新荣,王鑫,宫新乐,黄晋,黄丹,王鹏兴. 面向智能车辆的路面附着系数分段识别方法[J]. 汽车工程, 2023, 45(10): 1923-1932. |
| [14] | 宋慧新,刘冰轶,顾亮,张进秋. 增加缓冲器的馈能式悬架性能研究[J]. 汽车工程, 2023, 45(1): 77-85. |
| [15] | 林程,易江,田雨. 电动客车AMT换挡执行机构状态估计及参数辨识[J]. 汽车工程, 2022, 44(8): 1237-1250. |
|