汽车工程 ›› 2023, Vol. 45 ›› Issue (9): 1666-1676.doi: 10.19562/j.chinasae.qcgc.2023.09.015
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
李勇滔1,孙晨旭1( ),郑伟光1,2,许恩永3,李育方3,王善超3
),郑伟光1,2,许恩永3,李育方3,王善超3
收稿日期:2023-03-23
修回日期:2023-04-25
出版日期:2023-09-25
发布日期:2023-09-23
通讯作者:
孙晨旭
E-mail:sunchenxu6519@foxmail.com
基金资助:
Yongtao Li1,Chenxu Sun1(),Weiguang Zheng1,2,Enyong Xu3,Yufang Li3,Shanchao Wang3
Received:2023-03-23
Revised:2023-04-25
Online:2023-09-25
Published:2023-09-23
Contact:
Chenxu Sun
E-mail:sunchenxu6519@foxmail.com
摘要:
针对现有的毫米波雷达与视觉融合的碰撞预警算法误警率与漏警率较高等问题,提出了一种基于毫米波雷达与视觉融合的碰撞预警方法。首先基于距离速度阈值与生命周期方法对毫米波雷达数据进行预处理,并提出基于遗忘因子的自适应拓展卡尔曼滤波算法对目标进行追踪;利用加入改进的CBAM双通道注意力机制YOLOv5算法提高视觉识别的准确率。然后运用交并比的思想实现毫米波雷达与视觉的决策级融合。最后基于最小安全距离模型提出前碰撞预警策略。通过不同场景下的实车验证结果表明:该算法比单传感器算法更加准确,具有更好的鲁棒性。
李勇滔,孙晨旭,郑伟光,许恩永,李育方,王善超. 基于毫米波雷达与视觉融合的碰撞预警[J]. 汽车工程, 2023, 45(9): 1666-1676.
Yongtao Li,Chenxu Sun,Weiguang Zheng,Enyong Xu,Yufang Li,Shanchao Wang. Collision Warning Based on Fusion of Millimeter Wave Radar and Vision[J]. Automotive Engineering, 2023, 45(9): 1666-1676.
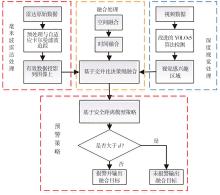
图 1
融合预警算法的整体框架"
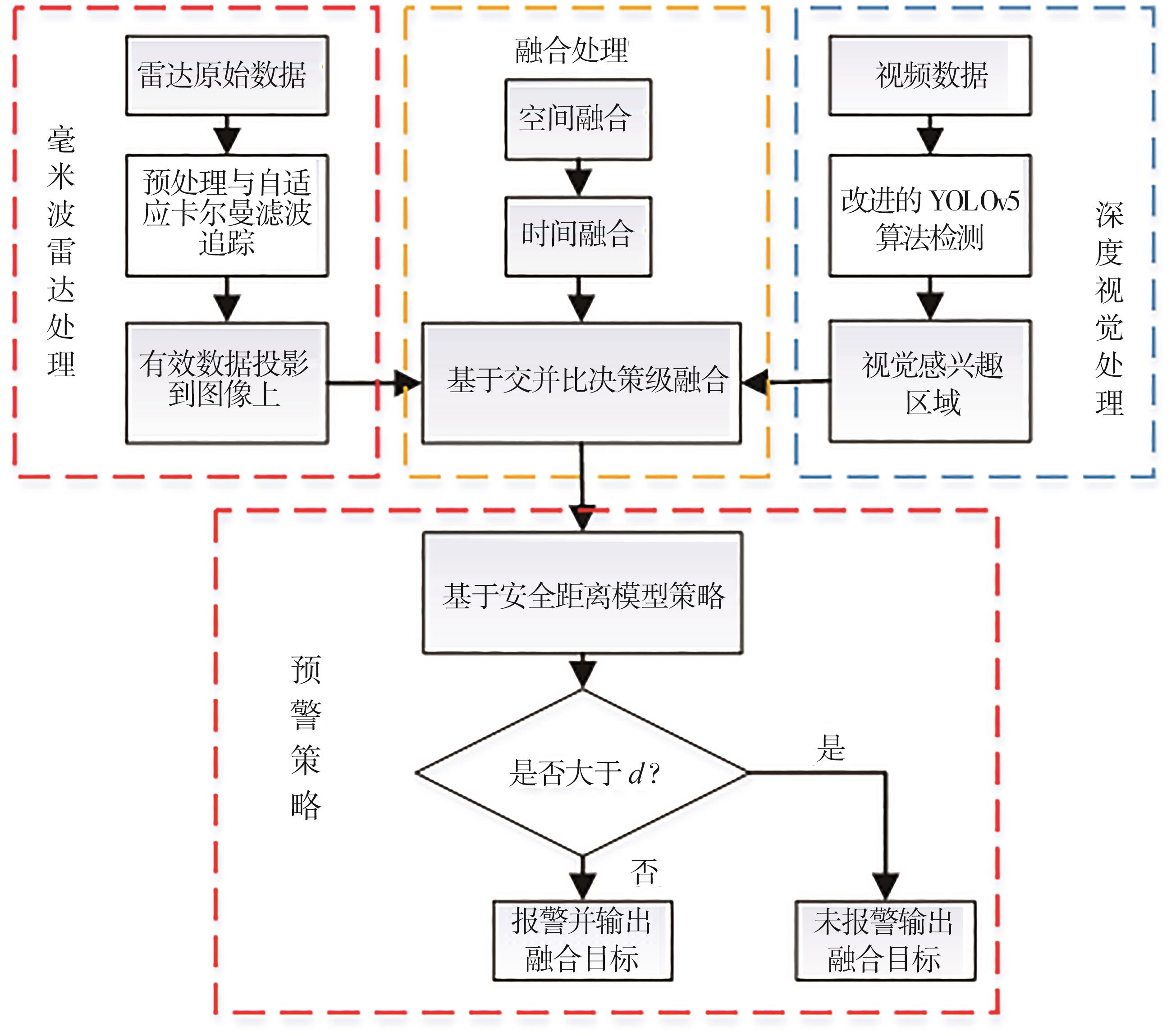
表1
目标生命周期阶段表示规则"
| 阶段 | 参数变化规则 | 表示物理意义 |
|---|---|---|
| 出现 | DetectNum≥5 LoseNum=0 | 连续探测5次及以上,目标出现 目标丢失设为0 |
| 持续 | DetectNum>5 LoseNum<25 | 该目标持续出现,运动轨迹稳定 目标丢失小于25次,持续跟踪 |
| 消失 | LoseNum≥25 DetectNum=0 | 目标消失 跟踪结束 |

图2
原始数据预处理效果对比图"
图3
空洞卷积的效果图"
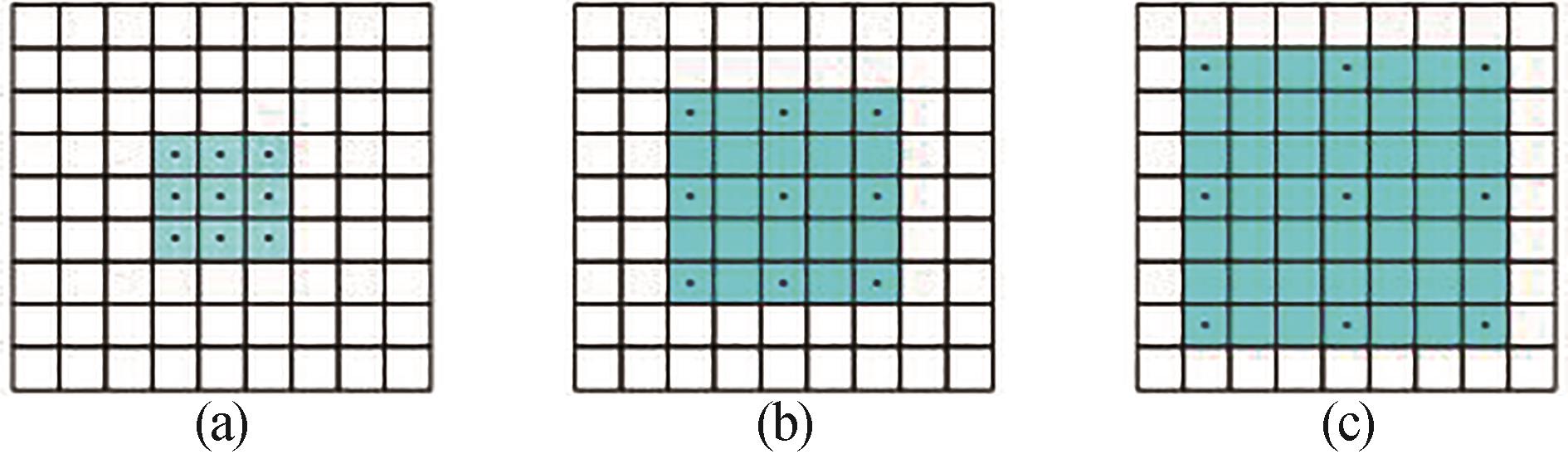

图4
改进的SAM空间注意力结构"
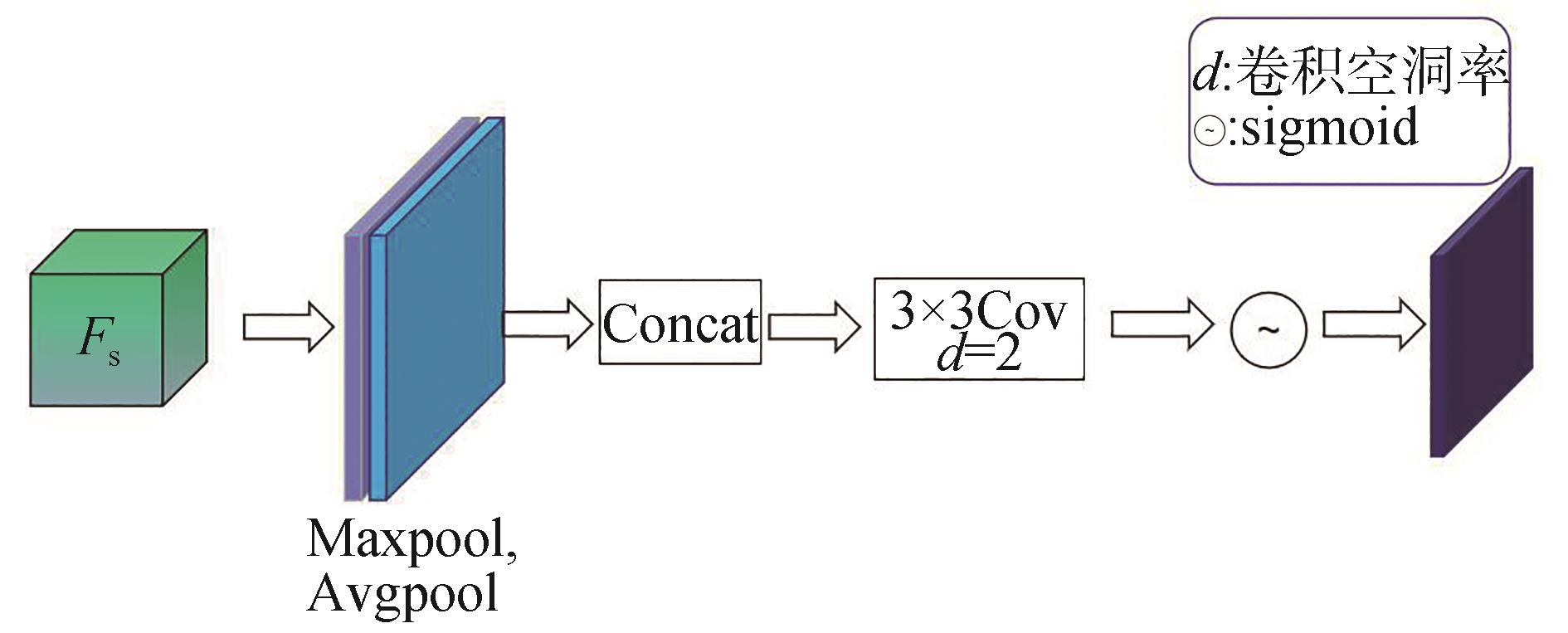

图5
手动标注数据集示意图"


图6
视觉算法检测效果图"

表 2
本文算法与YOLOv5算法的检测精度对比"
检测 网络 | AP/% | mAP/% | 浮点运算数/FLOPs | 检测 速度/PFS | ||
|---|---|---|---|---|---|---|
| Car | Bus | Truck | ||||
| YOLOv5 | 80.21 | 72.64 | 75.33 | 76.06 | 16.8 | 61.4 |
改进的 YOLOv5 | 83.47 | 76.41 | 76.49 | 78.79 | 19.2 | 56.1 |
图7
毫米波雷达与视觉时间融合"
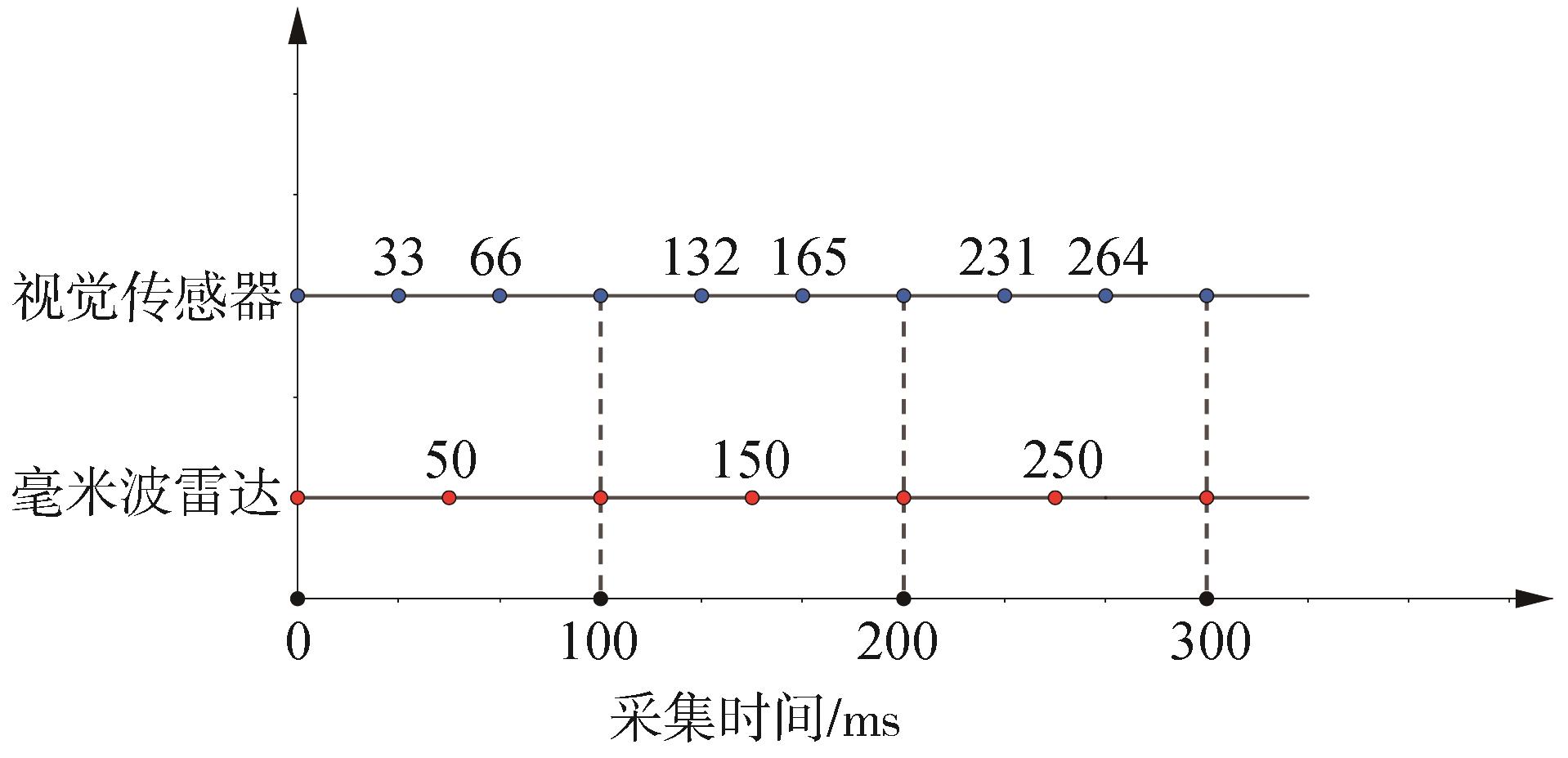

图8
图像投影上的雷达数据"


图 9
防撞最小安全距离模型"

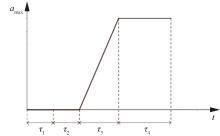
图10
减速度变化图"
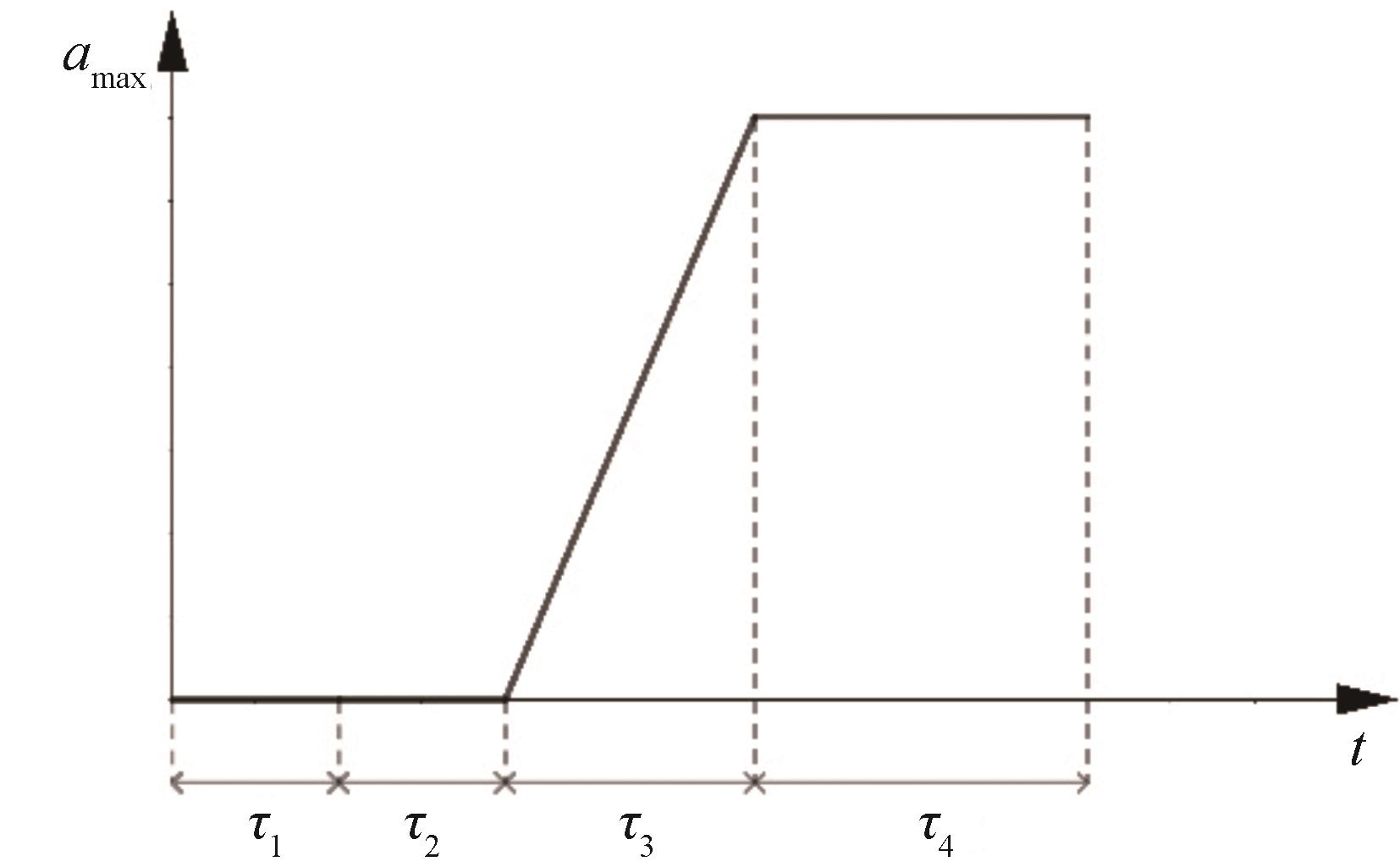

图11
实验车辆与传感器"


图12
EKF与FAEKF的轨迹图与误差曲线"
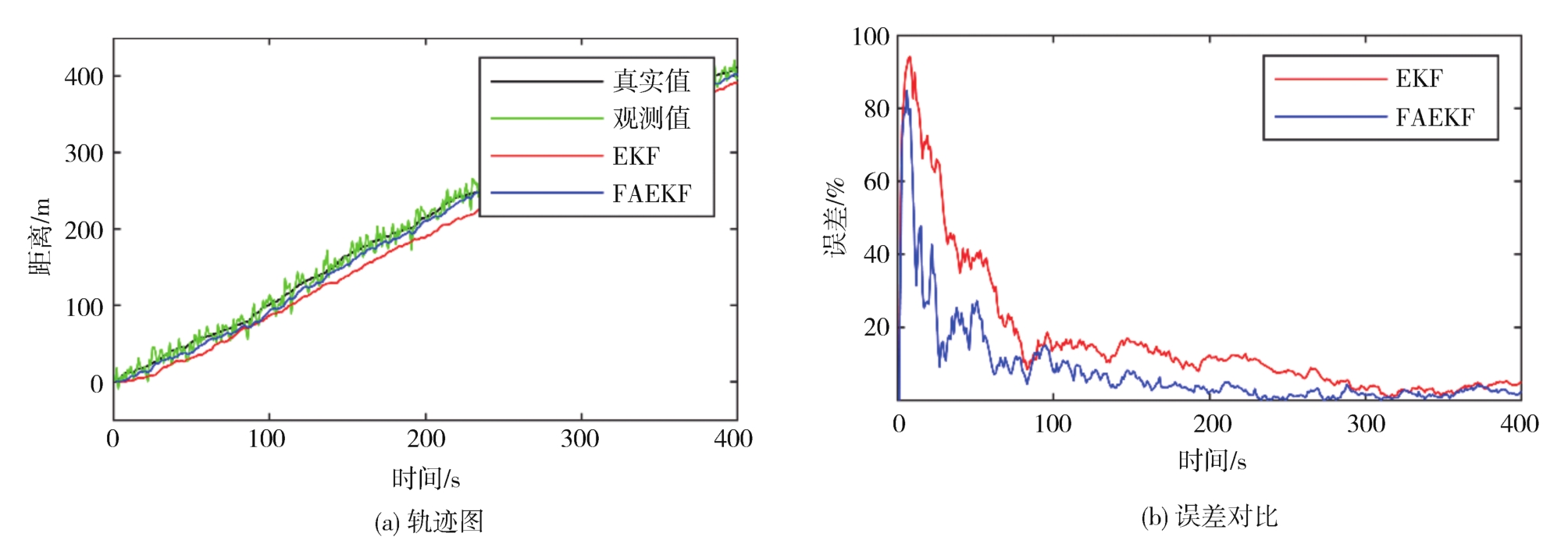

图13
融合算法检测结果图"

表 3
本文融合预警算法与传统预警算法实验对比结果"
| 道路环境 | 预警算法 | 昼夜环境 | 里程数/km | 总报警数 | 漏报警数 | 误报警数 | 准确率/% | 漏警率/% | 误警率/% |
|---|---|---|---|---|---|---|---|---|---|
| 城镇/乡村 | 本文算法 | 白天 | 82 | 86 | 2 | 3 | 94.32 | 2.41 | 3.49 |
| 夜晚 | 12 | 30 | 3 | 1 | 87.88 | 10.34 | 3.33 | ||
| 传统算法 | 白天 | 82 | 93 | 3 | 5 | 91.67 | 3.41 | 5.38 | |
| 夜晚 | 12 | 24 | 5 | 0 | 82.76 | 20.83 | 0 | ||
| 国道/省道 | 本文算法 | 白天 | 1 215 | 2 240 | 43 | 61 | 95.44 | 1.97 | 2.72 |
| 夜晚 | 905 | 512 | 36 | 6 | 92.34 | 7.11 | 1.17 | ||
| 传统算法 | 白天 | 1 215 | 2 532 | 67 | 122 | 92.73 | 2.78 | 4.82 | |
| 夜晚 | 905 | 486 | 27 | 10 | 92.79 | 5.67 | 2.06 | ||
| 高速公路 | 本文算法 | 白天 | 1 242 | 1 040 | 26 | 32 | 94.56 | 2.58 | 3.08 |
| 夜晚 | 1 627 | 236 | 10 | 2 | 95.12 | 4.27 | 0.85 | ||
| 传统算法 | 白天 | 1 242 | 1 076 | 44 | 51 | 91.52 | 4.29 | 4.74 | |
| 夜晚 | 1 627 | 197 | 12 | 5 | 91.87 | 6.25 | 2.54 | ||
| 总计 | 本文算法 | 5 083 | 4 144 | 120 | 105 | 94.72 | 2.97 | 2.53 | |
| 传统算法 | 5 083 | 4 408 | 158 | 193 | 92.31 | 3.75 | 4.38 |
| 1 | YAN Q T, LAN T. Thoughts on the construction of automobile service engineering major under the background of “new four moderniza-tions”[C]. 2021 2nd International Conference on Education, Knowledge and Information Management (ICEKIM). IEEE, 2021: 491-494. |
| 2 | WEI Z, ZHANG F, CHANG S, et al. Mmwave radar and vision fusion for object detection in autonomous driving: a review[J]. Sensors, 2022, 22(7): 2542. |
| 3 | GIRBES V, ARMESTO L, DOLS J, et al. An active safety system for low-speed bus braking assistance[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(2): 377-387. |
| 4 | MIANI M, DUNNHOFER M, MICHELONI C, et al. Young drivers’ pedestrian anti-collision braking operation data modelling for ADAS development[J]. Transportation Research Procedia, 2022, 60: 432-439. |
| 5 | YU G, ZHOU B, WANG Z, et al. Vehicle intelligent driving technology[M]. Intelligent Road Transport Systems: An Introduction to Key Technologies. Singapore: Springer Nature Singapore, 2022: 399-464. |
| 6 | 于增雨. 毫米波雷达人车目标分类方法研究[D]. 西安: 西安电子科技大学, 2021. |
| YU Z Y. Research on classification method of human and vehicle target base on millimeter wave radar [D]. Xi'an: Xi'an University of Electronic Science and Technology, 2021. | |
| 7 | 王战古. 不良天气条件下车辆检测方法研究[D]. 长春: 吉林大学, 2022. |
| WANG Z G. Research on vehicle detection methods under adverse weather conditions [D]. Changchun: Jilin University, 2022. | |
| 8 | BENBARRAD T, SALHAOUI M, KENITAR S B, et al. Intelligent machine vision model for defective product inspection based on machine learning[J]. Journal of Sensor and Actuator Networks, 2021, 10(1): 7. |
| 9 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2014: 580-587. |
| 10 | HE K, ZHANG X, REN S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916. |
| 11 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 779-788. |
| 12 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector[C]. European Conference on Computer Vision. Springer, Cham, 2016: 21-37. |
| 13 | 张海明,史涛.基于改进Faster R-CNN的目标检测算法研究[J]. 重庆理工大学学报(自然科学), 2022, 36(9):179-186. |
| ZHANG H M, SHI T. Research on the target detection algorithm based on the improved Faster R-CNN [J]. Journal of Chongqing University of Technology (Natural Sciences),2022,36(9):179-186. | |
| 14 | 谈文蓉,薛余坤,陈秋实,等.改进YOLOv4算法的高速公路碰撞预警系统[J]. 西南民族大学学报(自然科学版), 2022, 48(1):64-74. |
| TAN W R, XUE Y K, CHEN Q S, et al. Improved YOLOv4 algorithm for highway collision warning system[J]. Journal of Southwest University for Nationalities (Natural Science Edition),2022,48(1):64-74. | |
| 15 | ZHOU T, YANG M, JIANG K, et al. MMW radar-based technologies in autonomous driving: a review[J]. Sensors, 2020, 20(24): 7283. |
| 16 | WANG J G, CHEN S J, ZHOU L B, et al. Vehicle detection and width estimation in rain by fusing radar and vision[C]. 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV). IEEE, 2018: 1063-1068. |
| 17 | 张炳力,詹叶辉,潘大巍,等.基于毫米波雷达和机器视觉融合的车辆检测[J]. 汽车工程, 2021, 43(4):478-484. |
| ZHANG B L, ZHAN Y H, PAN D W, et al. Vehicle detection based on fusion of millimeter-wave radar and machine vision [J]. Automotive Engineering,2021,43(4):478-484. | |
| 18 | 胡延平,刘菲,魏振亚,等.毫米波雷达与视觉传感器信息融合的车辆跟踪[J].中国机械工程, 2021, 32(18):2181-2188. |
| HU Y P, LIU F, WEI Z Y, et al. Vehicle tracking of information fusion for millimeter wave radar and vision sensor[J]. China Mechanical Engineering,2021,32(18):2181-2188. | |
| 19 | 甘耀东,郑玲,张志达,等.融合毫米波雷达与深度视觉的多目标检测与跟踪[J]. 汽车工程, 2021, 43(7):1022-1029,1056. |
| GAN Y D, ZHENG L, ZHANG Z D, et al. Multi-target detection and tracking with fusion of millimeter-wave radar and depth vision[J]. Automotive Engineering,2021,43(7):1022-1029,1056. | |
| 20 | 王艳玲. 基于驾驶员与环境特性的车辆前向防撞预警系统研究[D]. 西安: 长安大学,2021. |
| WANG Y L. Study on vehicle forward collision avoidance early warning system based on driver and environment characteristics[D]. Xi'an: Chang'an University,2021. | |
| 21 | 唐甜. 基于毫米波雷达与视觉信息融合的前方车辆检测[D]. 成都: 电子科技大学,2021. |
| TANG T. Forward vehicle detection based on millimeter wave radar and vision information fusion [D]. Chengdu: University of Electronic Science and Technology, 2021. | |
| 22 | HU C, CHEN W, CHEN Y, et al. Adaptive Kalman filtering for vehicle navigation[J]. Journal of Global Positioning Systems, 2003, 2(1): 42-47. |
| 23 | JONDHALE S R, DESHPANDE R S. Tracking target with constant acceleration motion using kalman filtering[C]. 2018 International Conference on Advances in Communication and Computing Technology (ICACCT). IEEE, 2018: 581-587. |
| 24 | SCHUBERT R, ADAM C, OBST M, et al. Empirical evaluation of vehicular models for ego motion estimation[C]. 2011 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2011: 534-539. |
| 25 | XIANG X, WANG Z, QIAO Y. An improved YOLOv5 crack detection method combined with transformer[J]. IEEE Sensors Journal, 2022, 22(14): 14328-14335. |
| 26 | YU F, KOLTUN V. Multi-scale context aggregation by dilated convolutions[J]. arXiv preprint arXiv:, 2015. |
| 27 | BOCHINSKI E, SENST T, SIKORA T. Extending IOU based multi-object tracking by visual information[C]. 2018 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS). IEEE, 2018: 1-6. |
| 28 | YANG W, LIU J, ZHOU K, et al. An automatic emergency braking model considering Driver’s intention recognition of the front vehicle[J]. Journal of Advanced Transportation, 2020, 2020: 1-15. |
| [1] | 赵霞,李朝,付锐,葛振振,王畅. 基于深度卷积-Tokens降维优化视觉Transformer的分心驾驶行为实时检测[J]. 汽车工程, 2023, 45(6): 974-988. |
| [2] | 李琳辉,张鑫亮,付一帆,连静,马家旭. 基于TC-YOLOv7算法的可见光与红外后融合检测研究[J]. 汽车工程, 2023, 45(12): 2280-2290. |
| [3] | 陈龙,杨晨,蔡英凤,王海,李祎承. 基于多模态特征融合的行人穿越意图预测方法[J]. 汽车工程, 2023, 45(10): 1779-1790. |
| [4] | 张小俊,奚敬哲,史延雷,袁安录. 面向路侧视角目标检测的轻量级YOLOv7-R算法[J]. 汽车工程, 2023, 45(10): 1833-1844. |
| [5] | 张新荣,王鑫,宫新乐,黄晋,黄丹,王鹏兴. 面向智能车辆的路面附着系数分段识别方法[J]. 汽车工程, 2023, 45(10): 1923-1932. |
| [6] | 龙文民,鲁光泉,石茜,谭海天. 基于驾驶人跟驰特性的前撞预警指标与阈值确定方法[J]. 汽车工程, 2022, 44(9): 1339-1349. |
| [7] | 王大方,尚海,曹江,王涛,夏祥腾,韩雨霖. 基于自注意力机制的自动驾驶场景点云语义分割方法[J]. 汽车工程, 2022, 44(11): 1656-1664. |
| [8] | 甘耀东,郑玲,张志达,李以农. 融合毫米波雷达与深度视觉的多目标检测与跟踪[J]. 汽车工程, 2021, 43(7): 1022-1029. |
| [9] | 张炳力,詹叶辉,潘大巍,程进,宋伟杰,刘文涛. 基于毫米波雷达和机器视觉融合的车辆检测[J]. 汽车工程, 2021, 43(4): 478-484. |
| [10] | 刘军,陈岚磊,李汉冰. 基于类人视觉的多任务交通目标实时检测模型[J]. 汽车工程, 2021, 43(1): 50-58. |
| [11] | 蔡英凤, 邰康盛, 王海, 李祎承, 陈龙. 无人驾驶汽车周边车辆行为识别算法研究*[J]. 汽车工程, 2020, 42(11): 1464-1472. |
| [12] | 熊晓夏, 陈龙, 梁军, 蔡英凤, 江浩斌. 基于驾驶员避撞行为的行车风险判别方法的仿真研究*[J]. 汽车工程, 2019, 41(2): 153-160. |
| [13] | 王战古,高松,邵金菊,谭德荣,孙亮,于杰. 基于深度置信网络的多源信息前方车辆检测[J]. 汽车工程, 2018, 40(5): 554-560. |
|