汽车工程 ›› 2023, Vol. 45 ›› Issue (10): 1833-1844.doi: 10.19562/j.chinasae.qcgc.2023.10.006
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
张小俊1( ),奚敬哲1,2,史延雷2,袁安录2
),奚敬哲1,2,史延雷2,袁安录2
Xiaojun Zhang1(),Jingzhe Xi1,2,Yanlei Shi2,Anlu Yuan2
摘要:
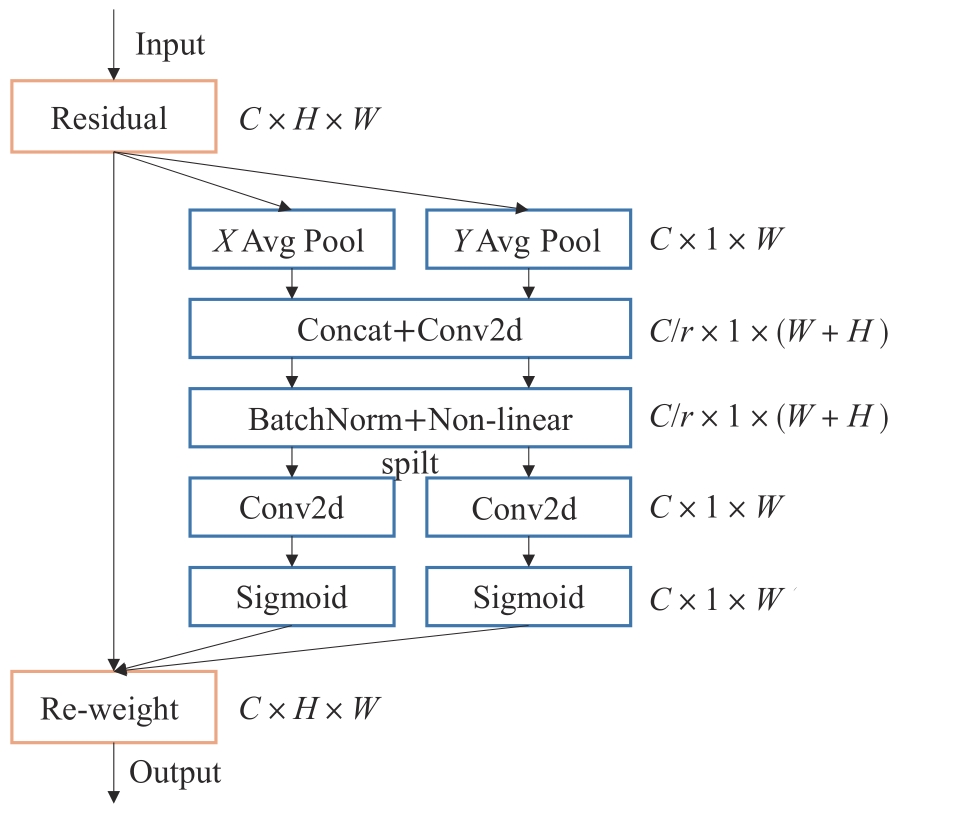
针对V2X中的路侧感知单元在检测过程中,模型部署困难的问题、被测目标所呈现的多尺度问题及目标之间遮挡问题,提出了一种基于YOLOv7算法的轻量级检测算法YOLOv7-R。首先使用改进的EfficientNetv2-s重新构建YOLOv7的主干网络,减小模型参数量,提高模型的推理速度。其次,采用CA坐标注意力机制,保留精确的位置信息,加强模型对多尺度目标的检测性能;同时采用Focal-EIoU损失函数,提升算法精度。最后,在预处理阶段使用GridMask数据增强,提升算法对被遮挡目标的学习能力。实验结果表明:相较于基线算法YOLOv7,该算法在DAIR-V2X-I数据集上的map@0.5和map@0.5:0.95分别提高了3%与4.8%,检测速率达到了96.3