汽车工程 ›› 2022, Vol. 44 ›› Issue (10): 1527-1536.doi: 10.19562/j.chinasae.qcgc.2022.10.007
所属专题: 底盘&动力学&整车性能专题2022年
高振海1,温文昊1,唐明弘1,张建2,陈国迎1( )
)
收稿日期:2022-04-17
修回日期:2022-05-13
出版日期:2022-10-25
发布日期:2022-10-21
通讯作者:
陈国迎
E-mail:cgy-011@163.com
基金资助:
Zhenhai Gao1,Wenhao Wen1,Minghong Tang1,Jian Zhang2,Guoying Chen1()
Received:2022-04-17
Revised:2022-05-13
Online:2022-10-25
Published:2022-10-21
Contact:
Guoying Chen
E-mail:cgy-011@163.com
摘要:
针对现有车辆运动状态估计算法严重依赖动力学模型精度且在大的质心侧偏角工况下准确性难以保障的问题,本文提出了一种基于混合神经网络的车辆运动状态估计算法。通过分析车辆本身的动力学基本特性,设计了适合于车辆运动状态估计的HNN混合神经网络架构,实现了车辆运动状态的深度学习估计。基于多个标准工况组成的数据集与典型实车测试工况进行了网络训练与测试验证。结果表明,相比于传统算法,本算法基于神经网络实现了精准的无动力学模型的汽车运动状态估计,提高了估计精度,且对路面附着系数变化具有鲁棒性。
高振海,温文昊,唐明弘,张建,陈国迎. 基于混合神经网络的汽车运动状态估计[J]. 汽车工程, 2022, 44(10): 1527-1536.
Zhenhai Gao,Wenhao Wen,Minghong Tang,Jian Zhang,Guoying Chen. Estimation of Vehicle Motion State Based on Hybrid Neural Network[J]. Automotive Engineering, 2022, 44(10): 1527-1536.
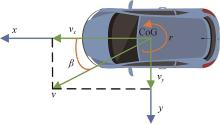
图1
车身坐标系与车辆运动状态示意图"
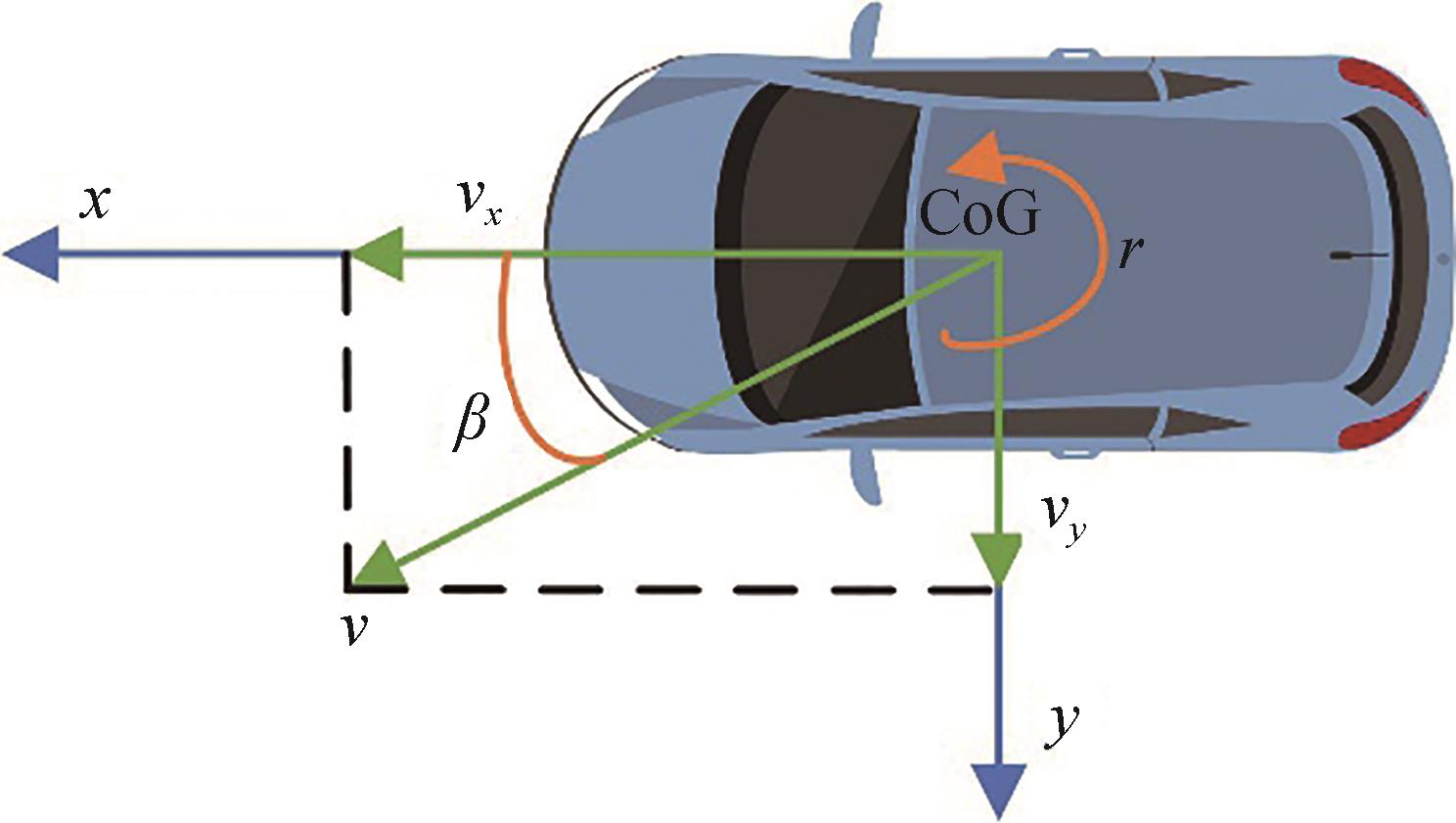
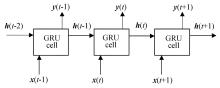
图2
GRU重复单元的顺序结构"
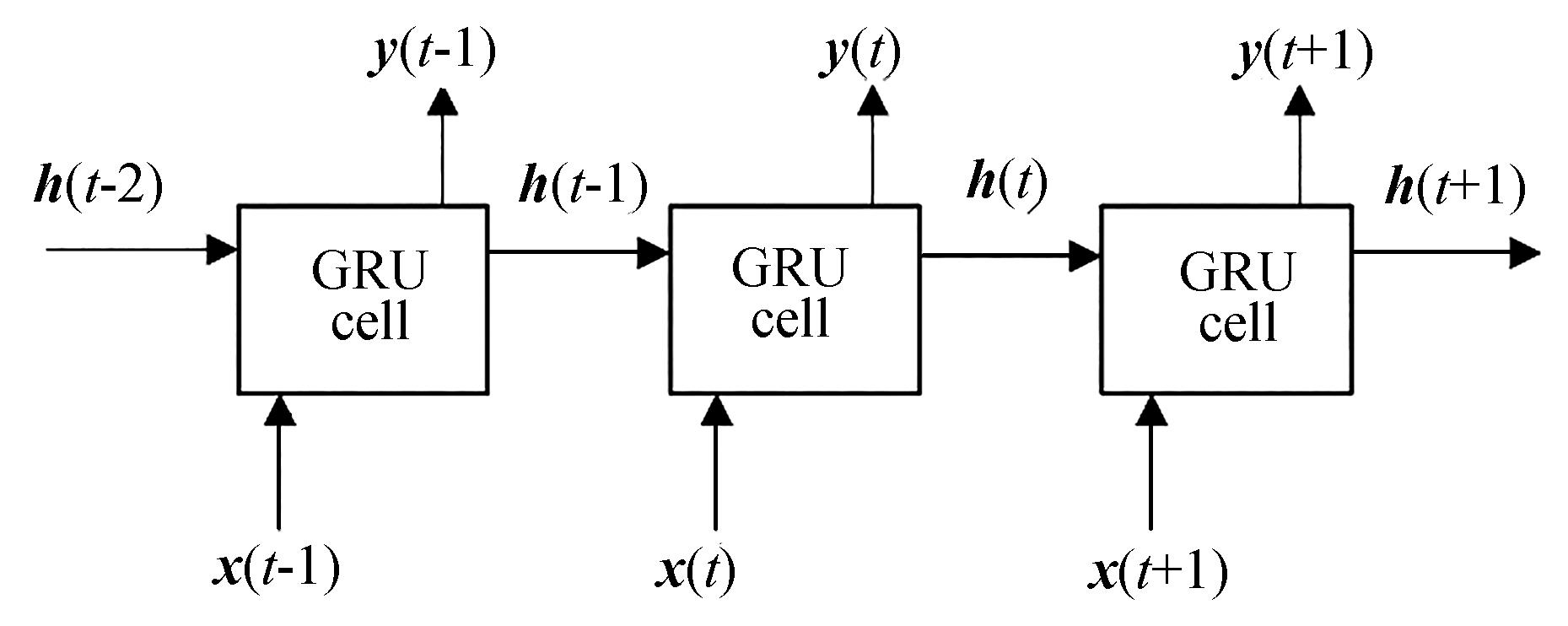
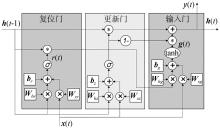
图3
GRU单元结构"
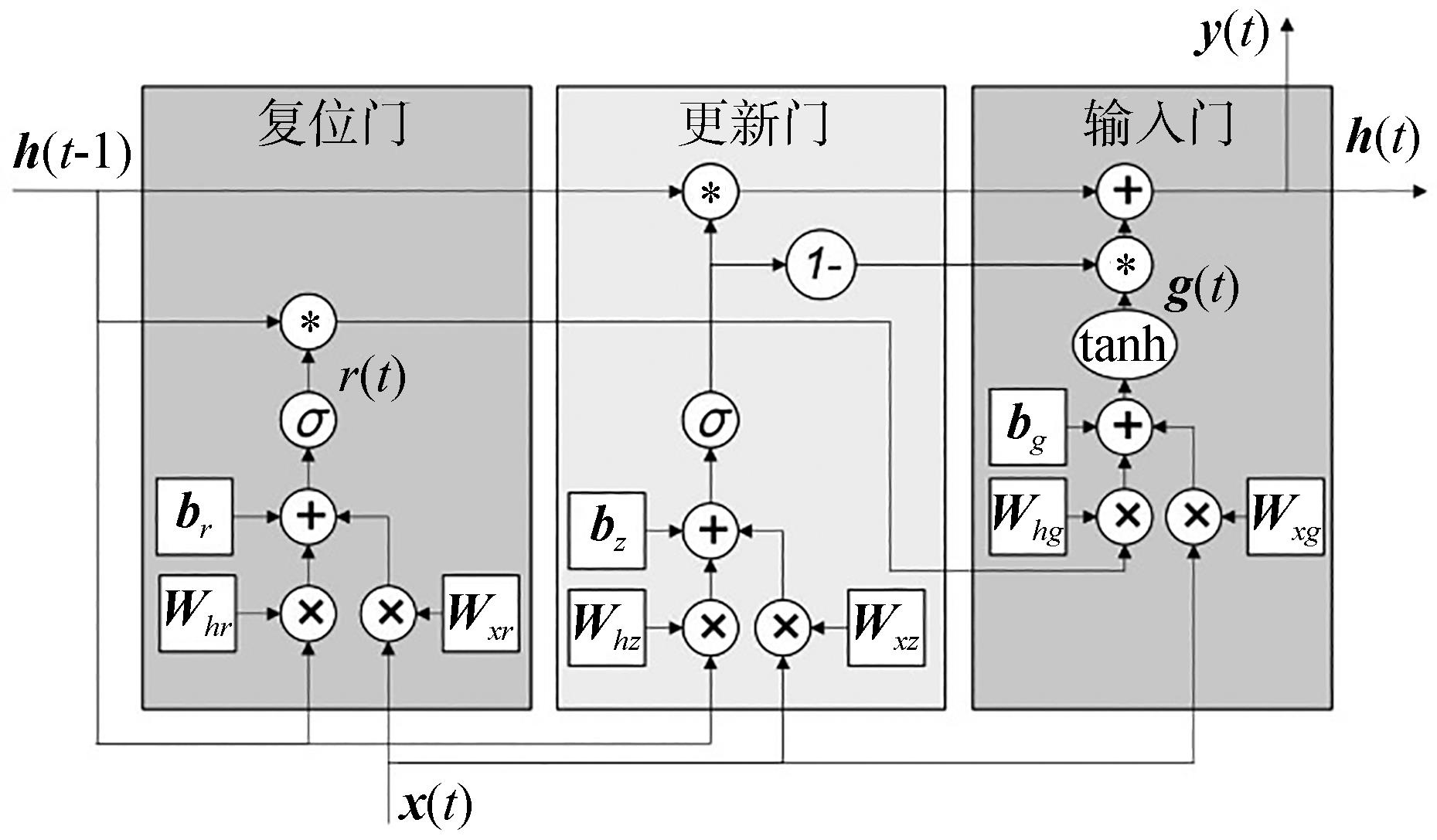
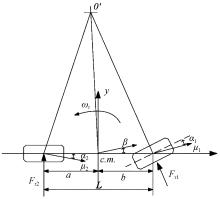
图4
2自由度车辆动力学模型"

图5
基于混合神经网络的汽车运动状态估计算法"

表1
传感器信号输入量"
| 采集量 | 符号 | 说明 |
|---|---|---|
| 转向盘转角/(°) | ±540 | |
| 驱动电机转矩/(N·m) | [50,350] | |
| 左前轮转速/(r·min-1) | - | |
| 右前轮转速/(r·min-1) | - | |
| 左后轮转速/(r·min-1) | - | |
| 右后轮转速/(r·min-1) | - | |
| 纵向加速度/g | 簧上质量质心处 | |
| 侧向加速度/g | 簧上质量质心处 |
表2
纵向速度估计网络对比"
| 神经网络模型 | GRU | DNN | DNN(包含动力系统状态输入) |
|---|---|---|---|
| RMSE | 2.374 2 | 0.034 1 | 0.027 6 |
| 变化率 | ↓98.6% | ↓19.1% | |
| MAE | 1.976 1 | 0.027 7 | 0.018 5 |
| 变化率 | ↓98.6% | ↓33.2% |
表3
侧向速度与横摆角速度估计网络对比"
| 神经网络模型 | DNN | GRU | GRU(输入包含纵向速度估计结果) |
|---|---|---|---|
| RMSE | 2.214 5 | 1.250 8 | 1.099 9 |
| 变化率 | - | ↓43.5% | ↓12.1% |
| MAE | 1.897 8 | 0.982 9 | 0.747 1 |
| 变化率 | - | ↓48.2% | ↓24.0% |

图6
驾驶模拟器数据采集过程"
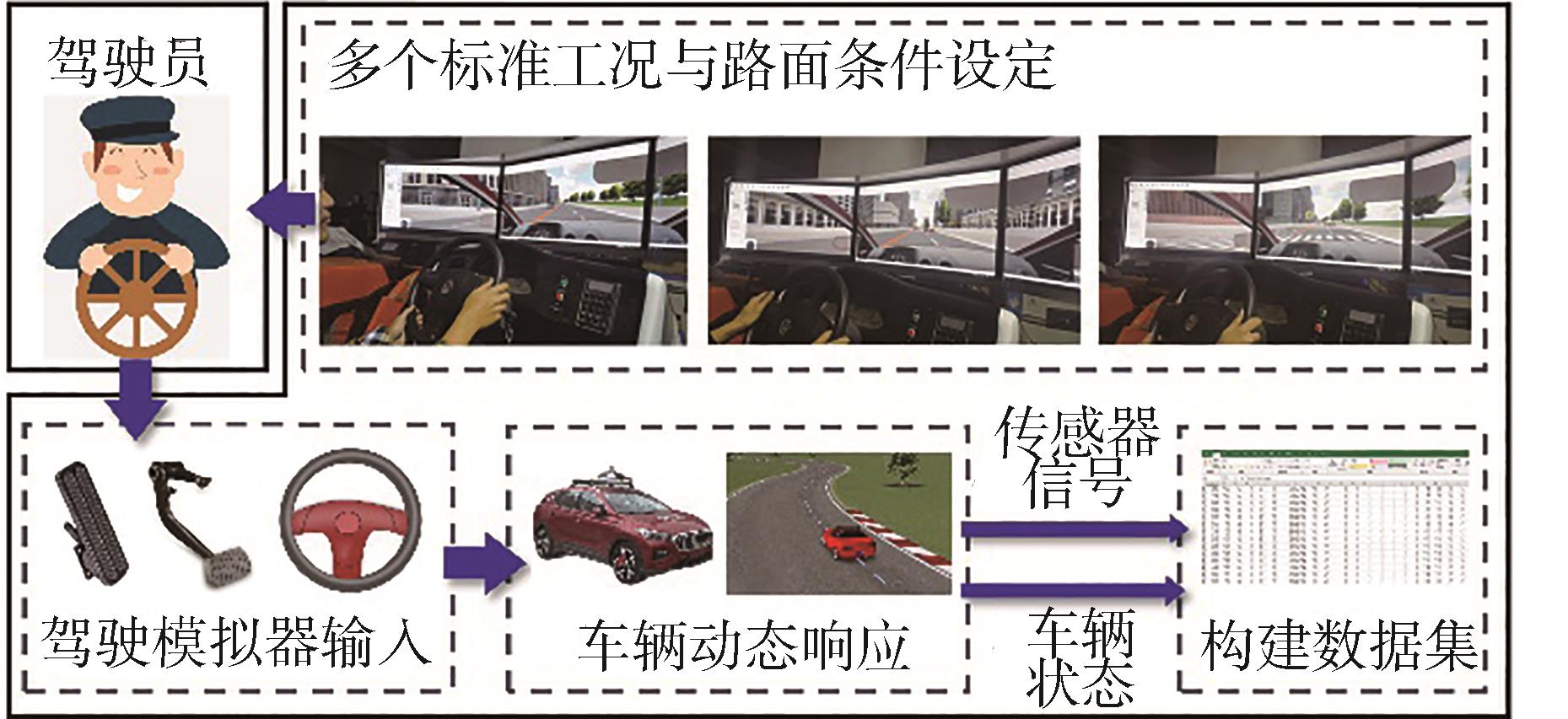
表4
数据集所含侧向工况总结"
| 本车转向操作 | 道路摩擦因数 | 车速/(km·h-1) | 转向盘转角/(°) |
|---|---|---|---|
| 左侧双移线 | 0.3 | 20-70 | |
| 左侧双移线 | 0.5,0.85,1.0 | 20-120 | |
| 右侧双移线 | 0.3 | 20-70 | |
| 右侧双移线 | 0.5,0.85,1.0 | 20-120 | |
| 左侧J型转向 | 0.3,0.5, 0.85,1.0 | 20-120 | 40,60,90,100,120 |
| 右侧J型转向 | 0.3,0.5, 0.85,1.0 | 20-120 | 40,60,90,100,120 |
| 正弦转向0.2 Hz | 0.5,0.85 | 30-60 | ±60,±90 |
| 正弦转向0.5 Hz | 0.5,0.85 | 30-60 | ±60,±90 |
表5
数据集所含纵向工况总结"
| 本车纵向操作 | 道路摩擦因数 | 加速踏板开度/% | 加速踏板开度最大值/% |
|---|---|---|---|
| 固定加速踏板开度 | 0.3,0.5,0.85,1.0 | 10-100 | |
| 加速踏板开度平滑增大 | 0.3,0.5,0.85,1.0 | 30,60,90 |
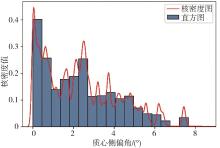
图7
数据集中质心侧偏角分布"
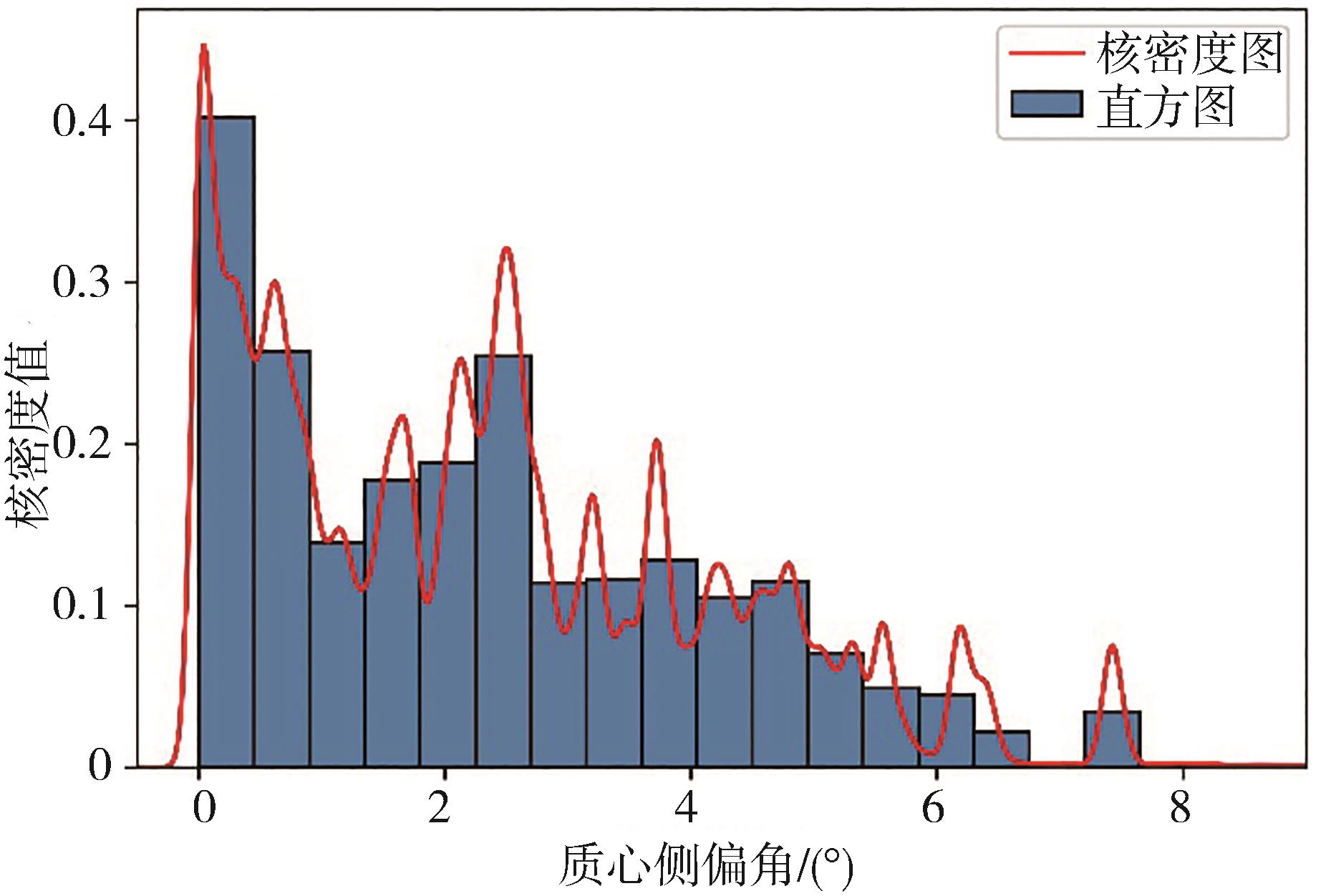
图8
纵向速度估计层训练过程"
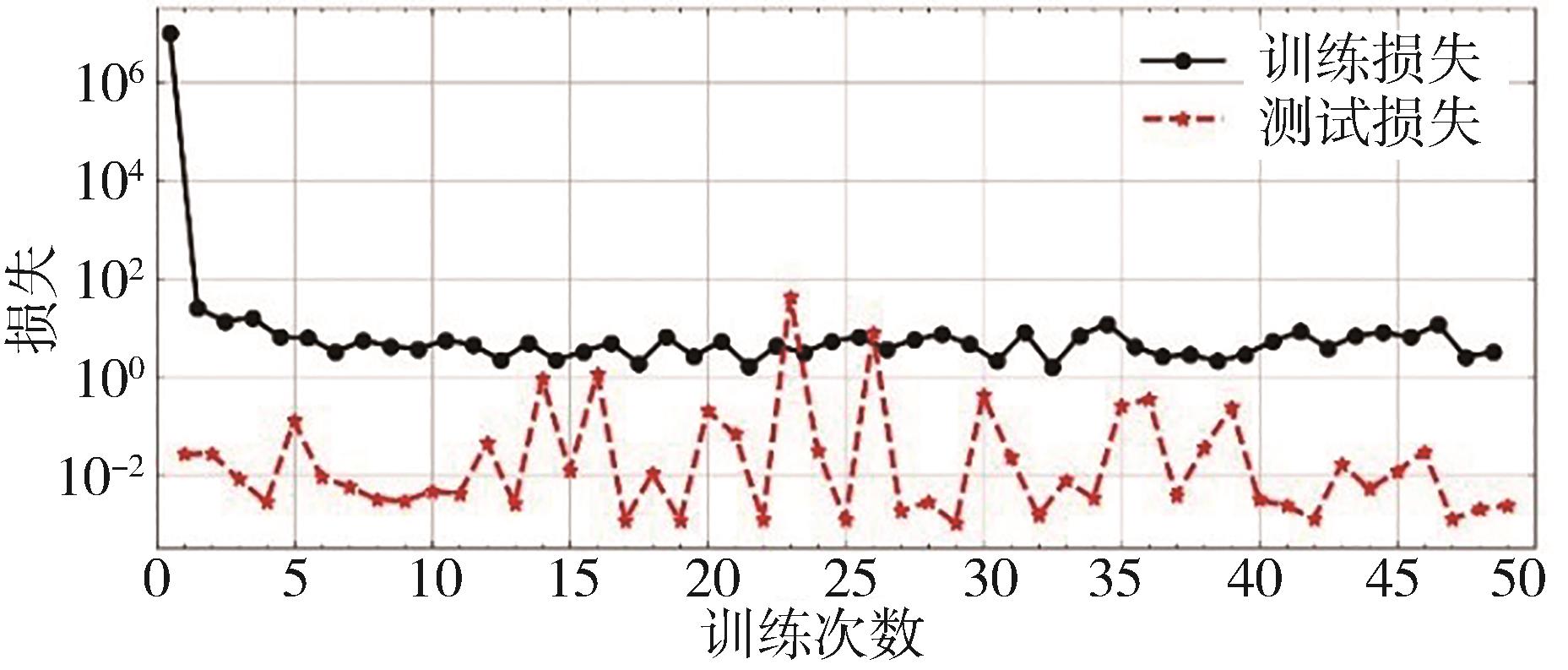
图9
侧向速度与横摆角速度估计层训练过程"
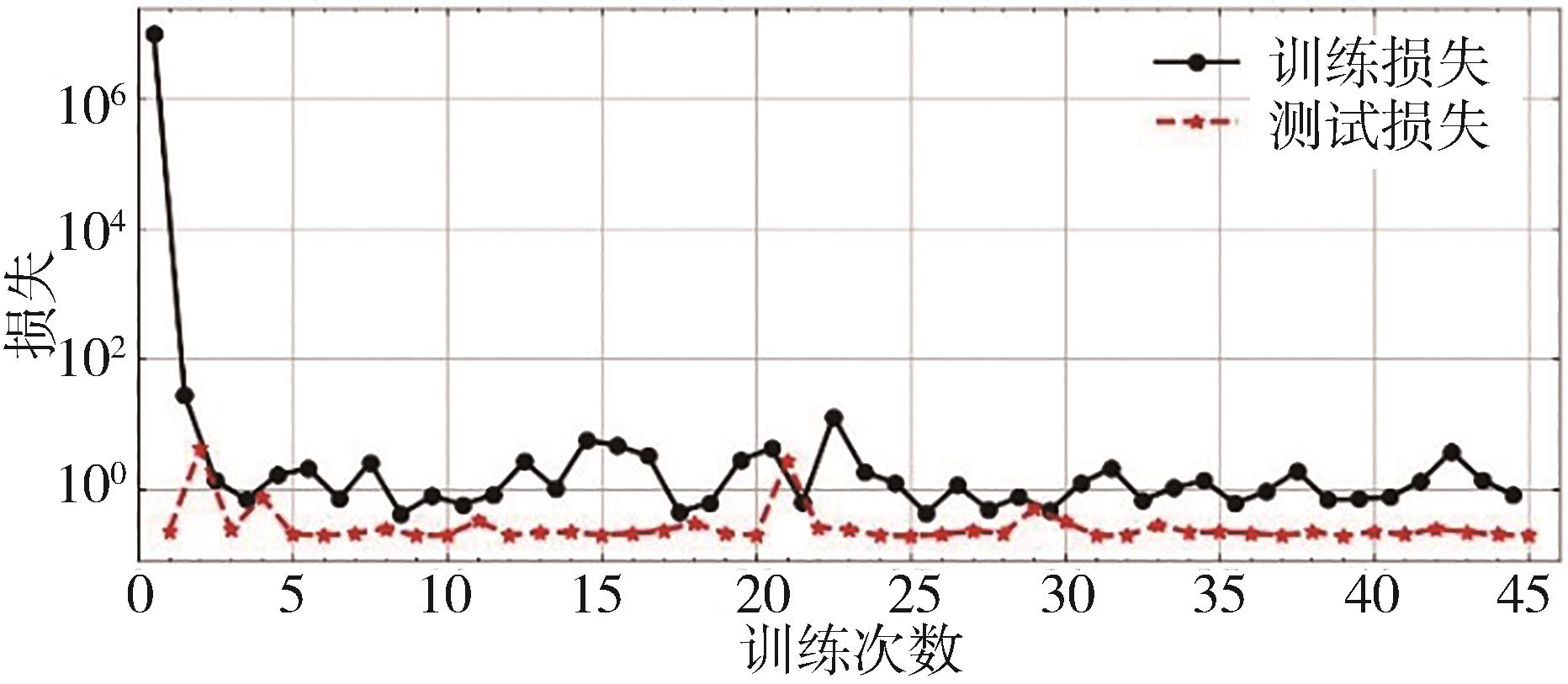
表6
纵向速度估计网络超参数设置"
| 项目 | 参数 | 取值 |
|---|---|---|
| 网络架构 | 隐层数 | 4 |
| 第1层单元数 | 256 | |
| 第2层单元数 | 256 | |
| 第3层单元数 | 128 | |
| 第4层单元数 | 128 | |
| 参数个数 | 118 145 | |
| 激活函数 | Relu | |
| 训练过程 | 小批量大小 | 32 |
| 学习率初值 | 0.001 | |
| 提前停止耐心值 | 20 | |
| 训练算法 | 梯度衰减因子 | 0.9 |
| 平方梯度衰减因子 | 0.99 | |
| 偏置小量 | 1×10-8 |
表7
侧向速度与横摆角速度估计网络超参数设置"
| 项目 | 参数 | 取值 |
|---|---|---|
| 网络架构 | 输入序列长度 | 5 |
| 隐层数 | 1 | |
| GRU单元数 | 200 | |
| 全连接隐层单元数 | 64 | |
| dropout率 | 0.075 | |
| 参数个数 | 140 794 | |
| 激活函数 | Relu | |
| 训练过程 | 小批量大小 | 32 |
| 学习率初值 | 0.001 | |
| 提前停止耐心值 | 20 | |
| 训练算法 | 梯度衰减因子 | 0.9 |
| 平方梯度衰减因子 | 0.99 | |
| 偏置小量 | 1×10-8 |
表8
对比算法"
| 算法类型 | 传统EKF | 经典DNN网络 | 经典GRU网络 | 本文所提HNN网络 |
|---|---|---|---|---|
| 特点 | 基于动力学机理构建 | 可表达任意的非线性的关系 | 可显式表达时序依赖关系 | 基于车辆特性设计的混合网络架构 |
图10
测试工况转向盘转角输入曲线"
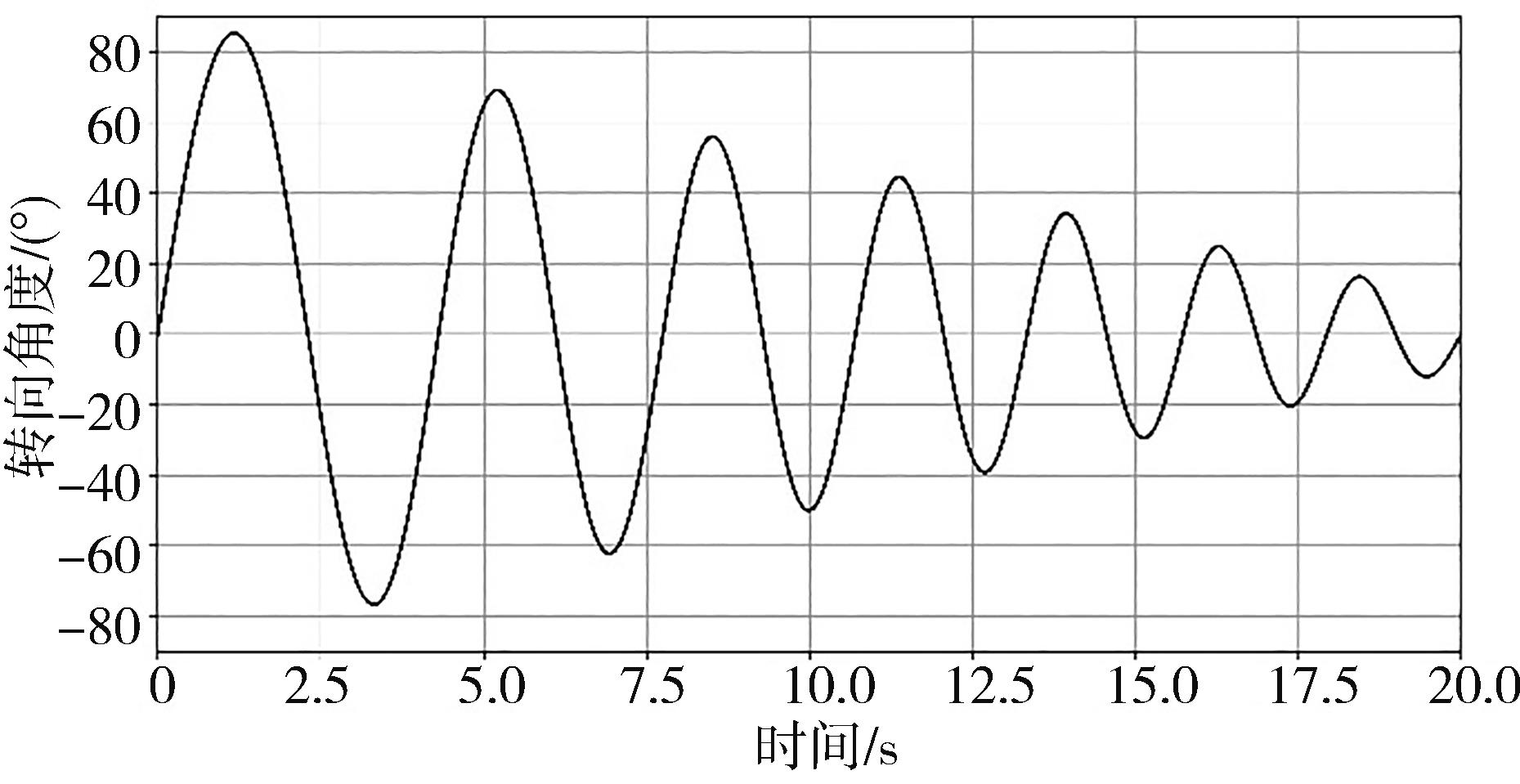
图11
车速30 km/h扫频工况下的估计结果"
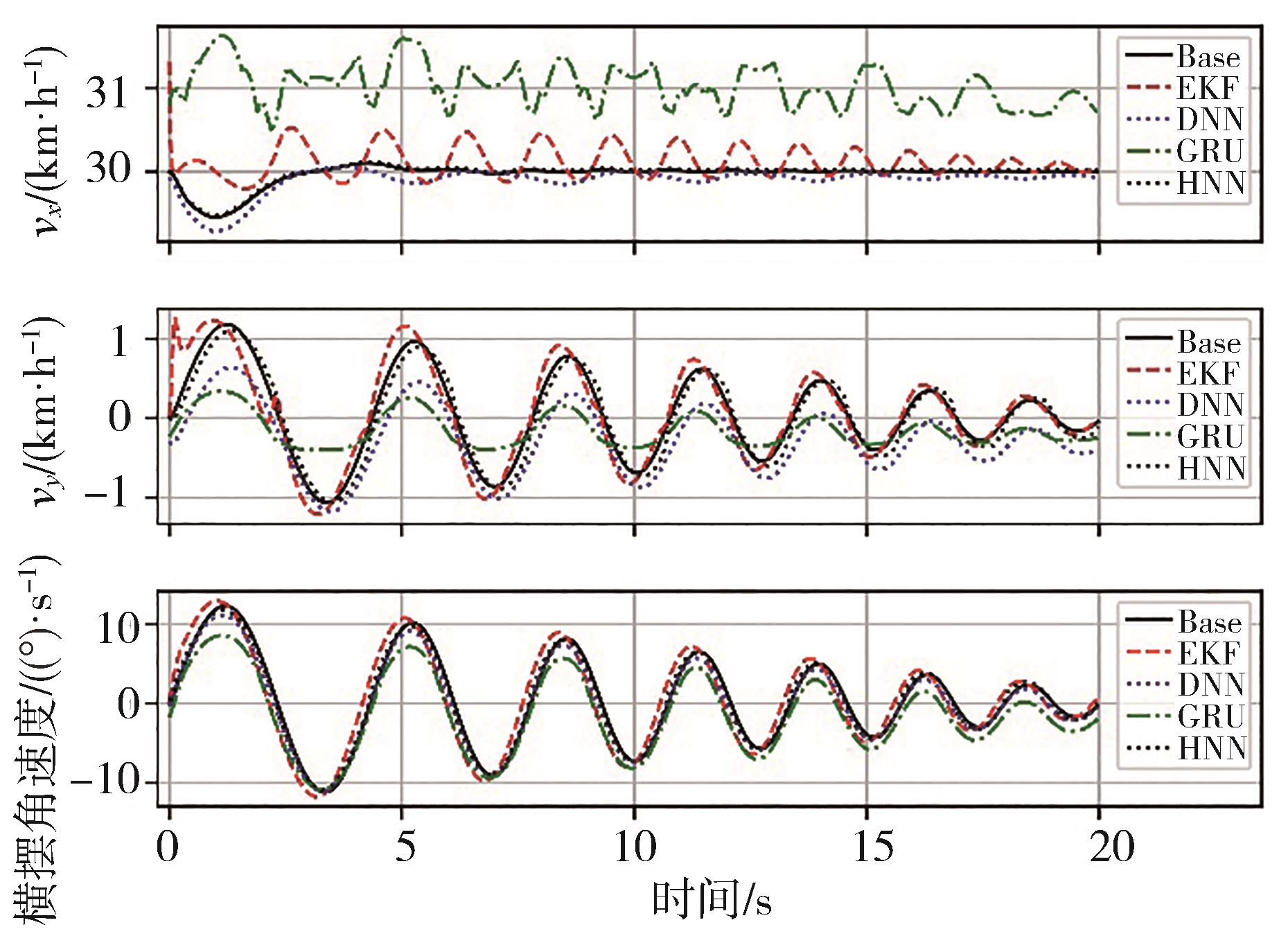

图12
车速70 km/h扫频工况下的估计结果"
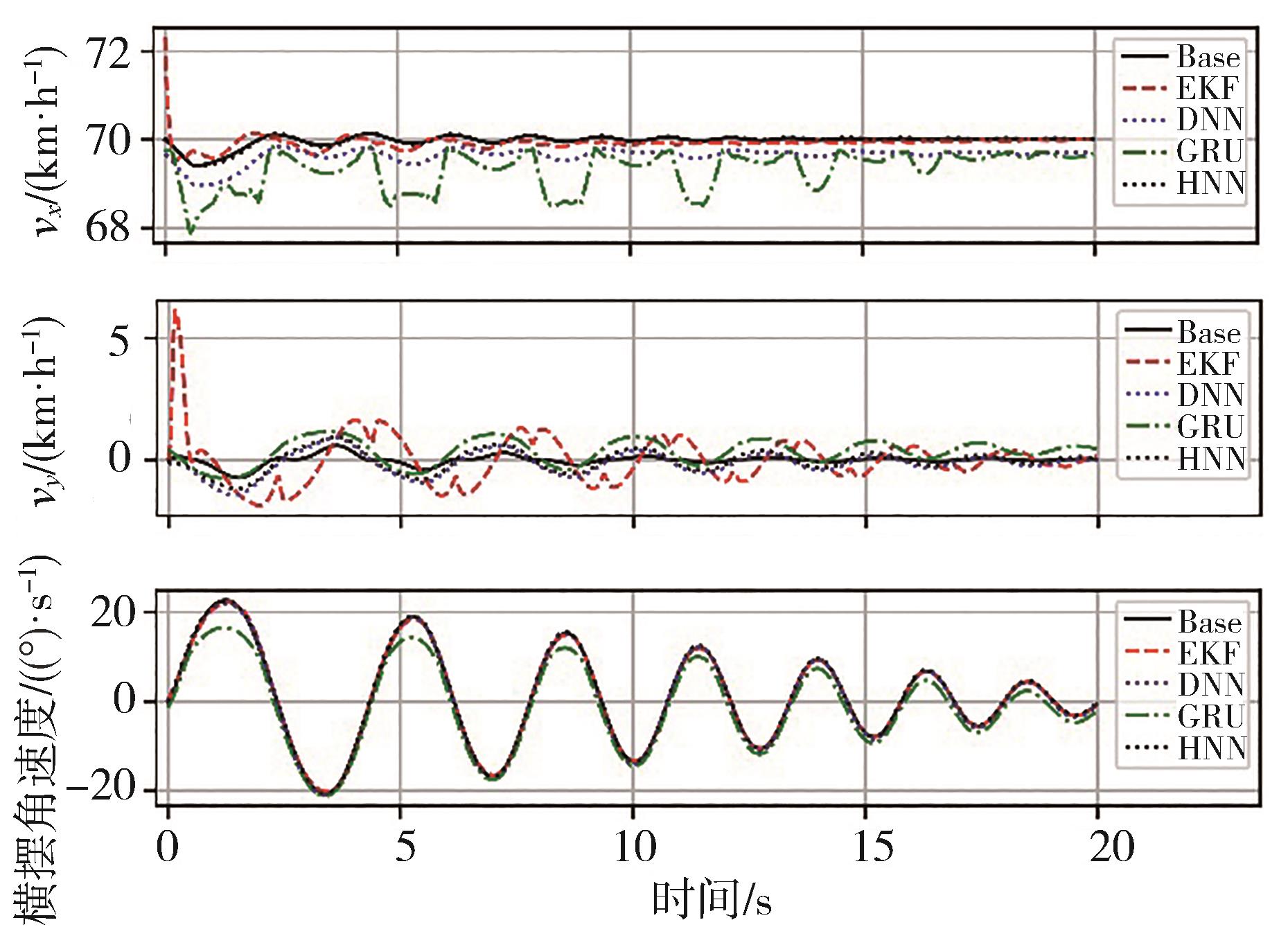
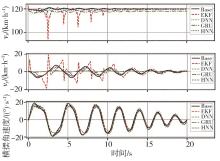
图13
车速120 km/h扫频工况下的估计结果"
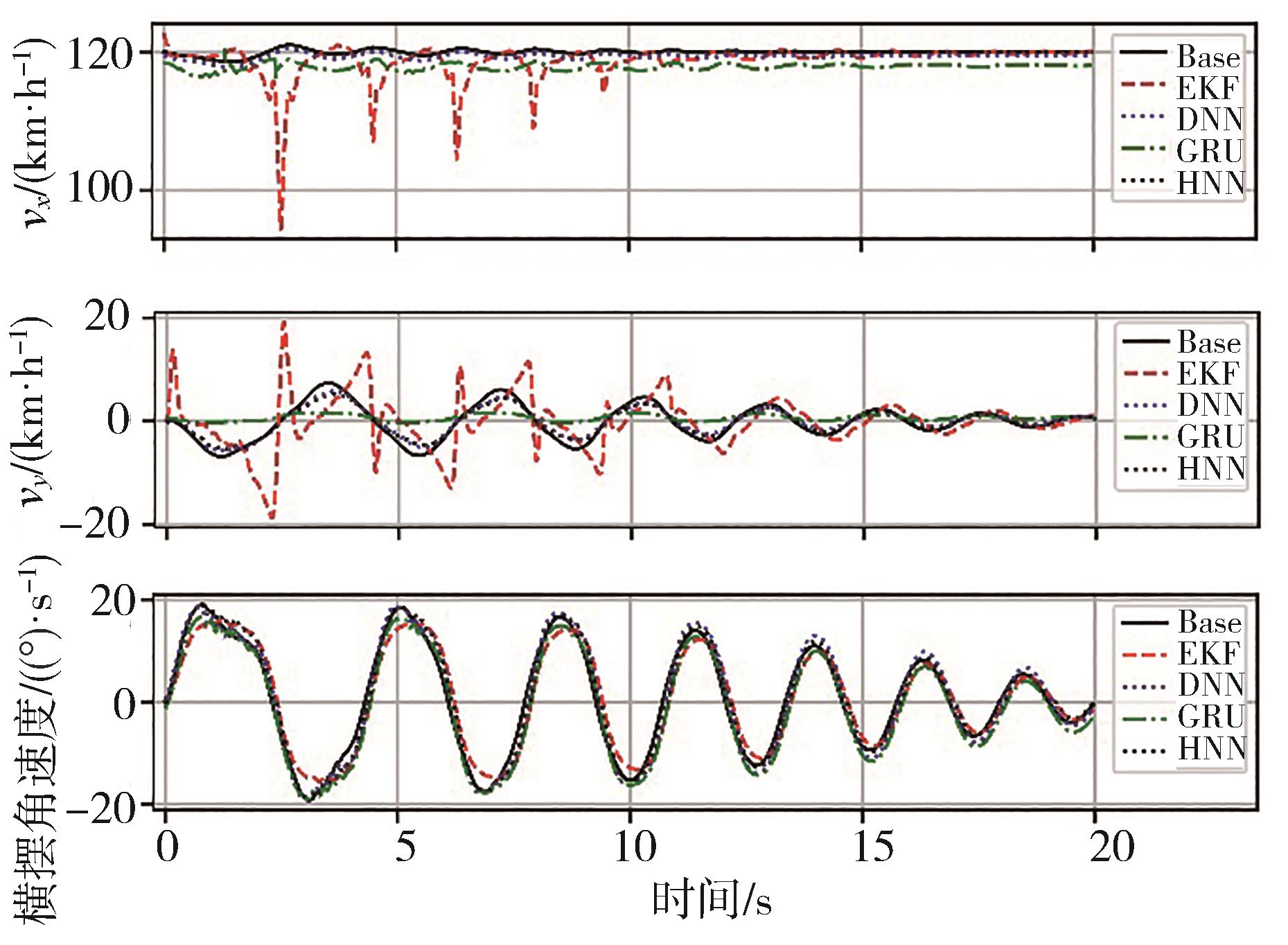
表9
不同车速下各算法估计均方误差RMSE"
| 估计量 | 车速/(km·h-1) | 对比算法 | |||
|---|---|---|---|---|---|
| EKF | DNN | GRU | HNN | ||
| 30 | 0.240 6 | 0.087 0 | 1.104 1 | 0.019 8 | |
| 70 | 0.230 3 | 0.341 4 | 0.749 7 | 0.021 2 | |
| 120 | 2.052 8 | 0.627 0 | 2.024 6 | 0.044 9 | |
| 30 | 0.196 9 | 0.352 9 | 0.741 2 | 0.110 0 | |
| 70 | 0.940 2 | 0.299 8 | 0.500 2 | 0.279 1 | |
| 120 | 3.192 5 | 1.226 6 | 2.709 2 | 1.179 6 | |
| 30 | 1.891 7 | 0.810 8 | 2.108 6 | 0.565 8 | |
| 70 | 0.723 5 | 0.520 2 | 2.044 3 | 0.381 5 | |
| 120 | 2.917 4 | 1.709 6 | 2.434 5 | 1.504 1 | |
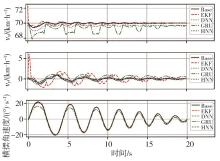
图14
路面摩擦因数0.85扫频工况下的估计结果"
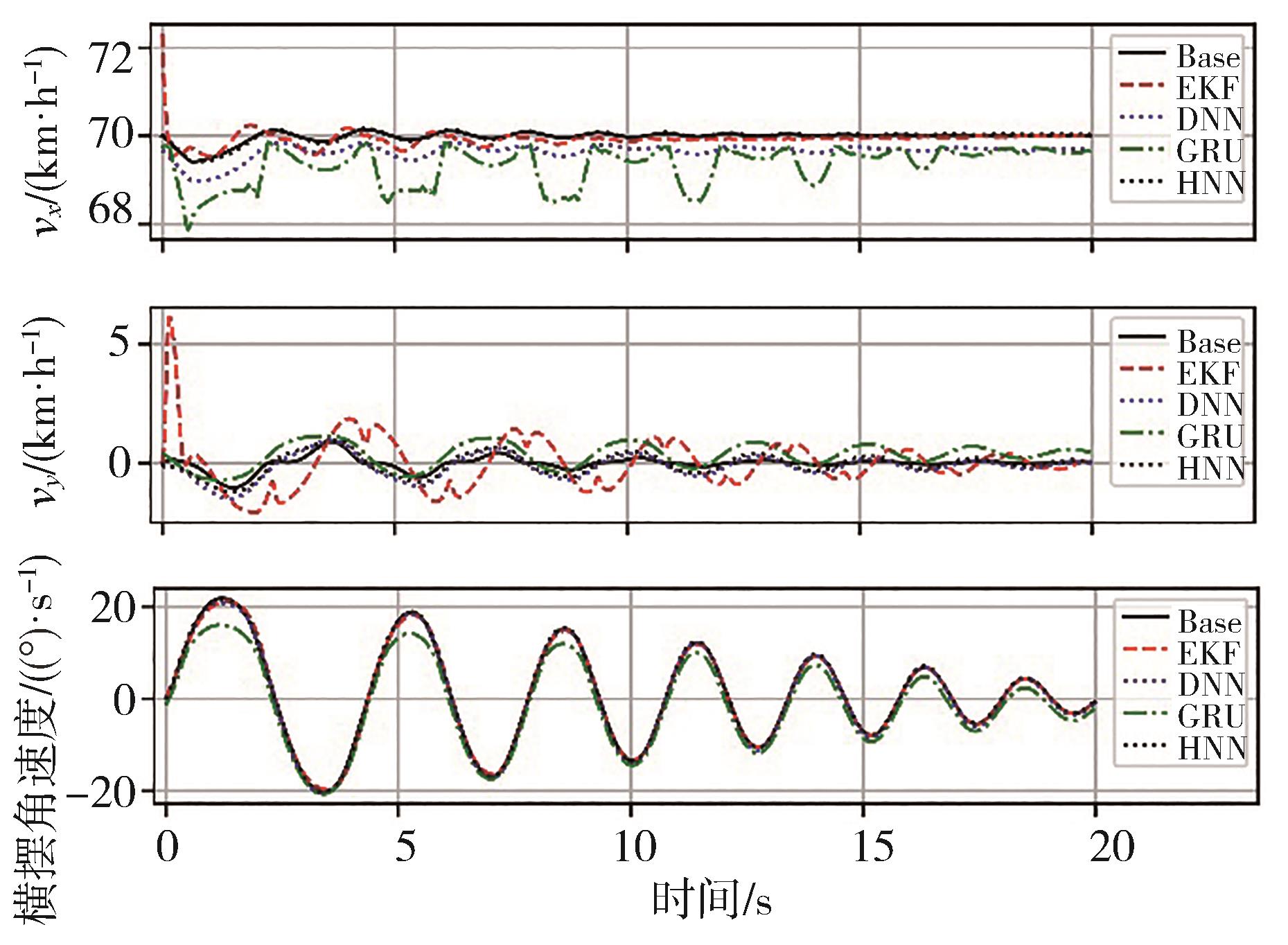

图15
路面摩擦因数0.5扫频工况下的估计结果"
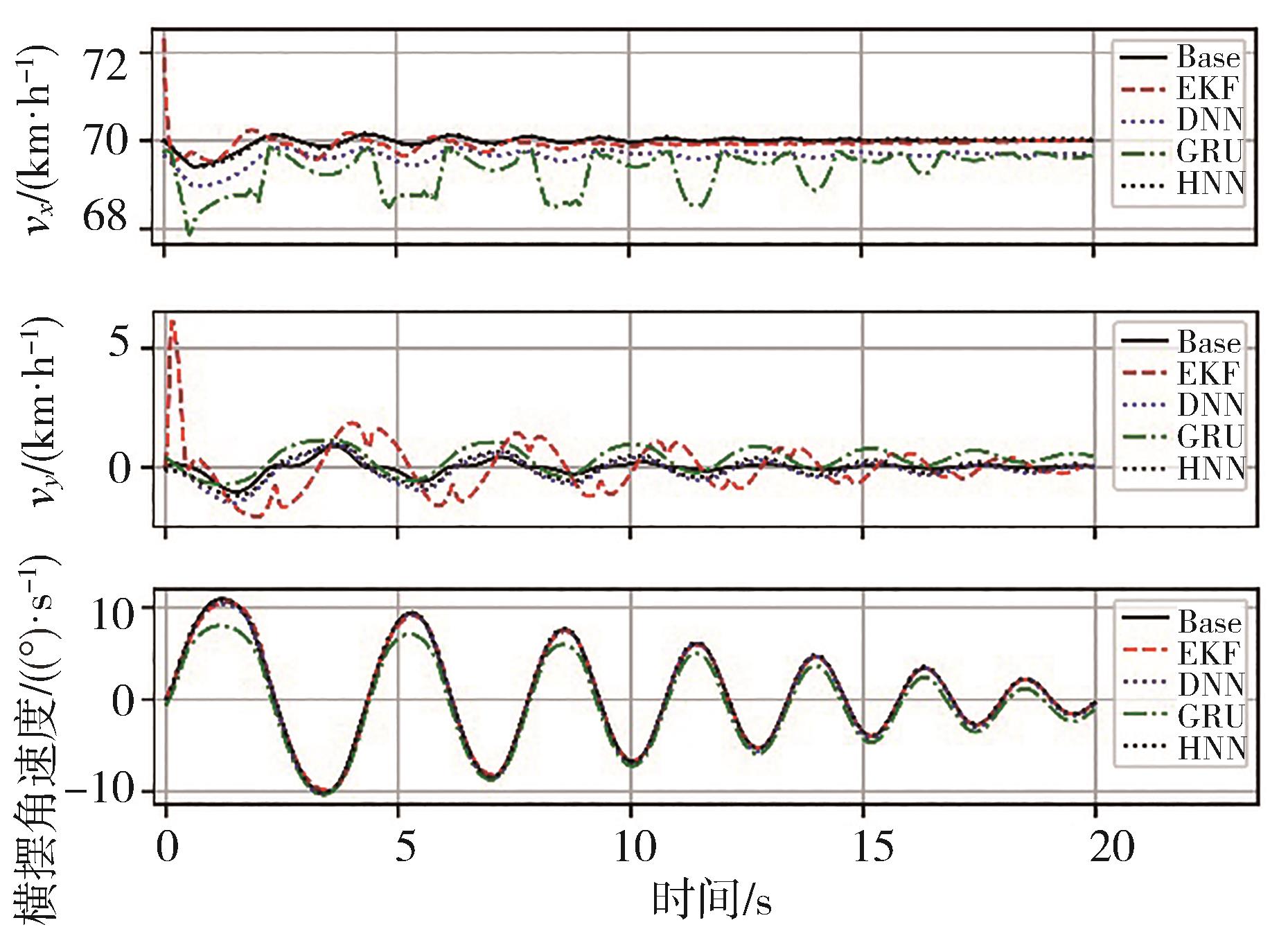
图16
路面摩擦因数0.3扫频工况下的估计结果"
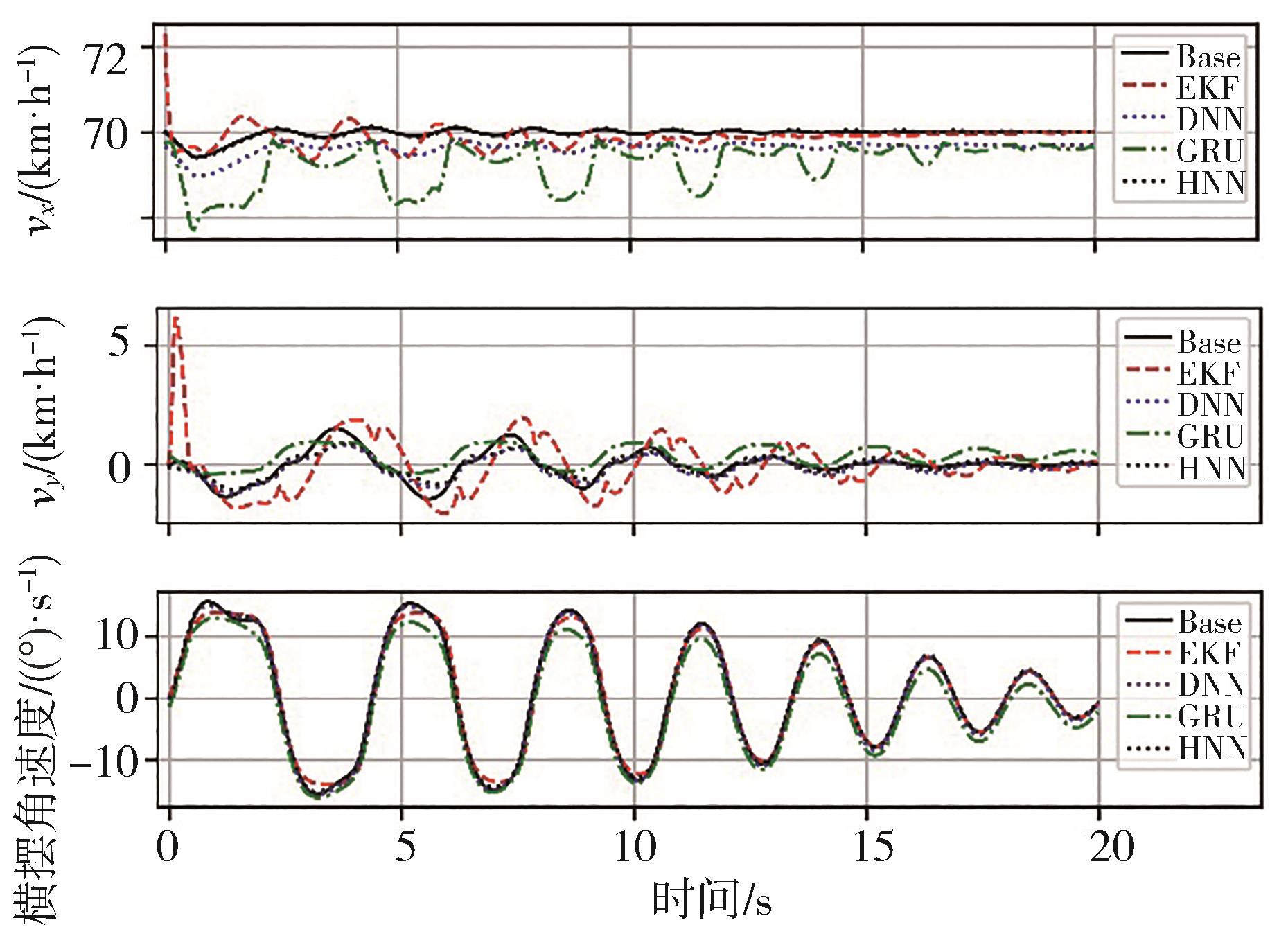
表10
不同路面下各算法估计均方误差RMSE"
| 估计量 | 路面 | 对比算法 | |||
|---|---|---|---|---|---|
| EKF | DNN | GRU | HNN | ||
| 0.3 | 1.060 7 | 0.504 8 | 1.437 8 | 0.030 6 | |
| 0.5 | 0.925 5 | 0.502 4 | 1.508 3 | 0.029 5 | |
| 0.85 | 1.320 7 | 0.505 5 | 1.562 1 | 0.037 4 | |
| 1.0 | 2.192 7 | 0.506 7 | 1.593 7 | 0.041 5 | |
| 0.3 | 1.518 6 | 1.127 0 | 1.755 1 | 1.064 0 | |
| 0.5 | 1.675 7 | 0.970 7 | 1.882 9 | 0.922 6 | |
| 0.85 | 2.673 2 | 0.734 0 | 2.050 8 | 0.720 4 | |
| 1.0 | 3.145 3 | 0.661 8 | 2.085 4 | 0.660 5 | |
| 0.3 | 2.208 5 | 1.407 3 | 2.328 9 | 1.133 4 | |
| 0.5 | 2.206 7 | 1.193 3 | 2.192 5 | 1.037 8 | |
| 0.85 | 2.056 1 | 1.232 0 | 2.227 2 | 1.066 7 | |
| 1.0 | 2.023 8 | 1.317 4 | 2.240 7 | 1.147 2 | |
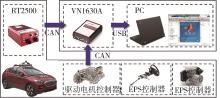
图17
实车数据采集方案"
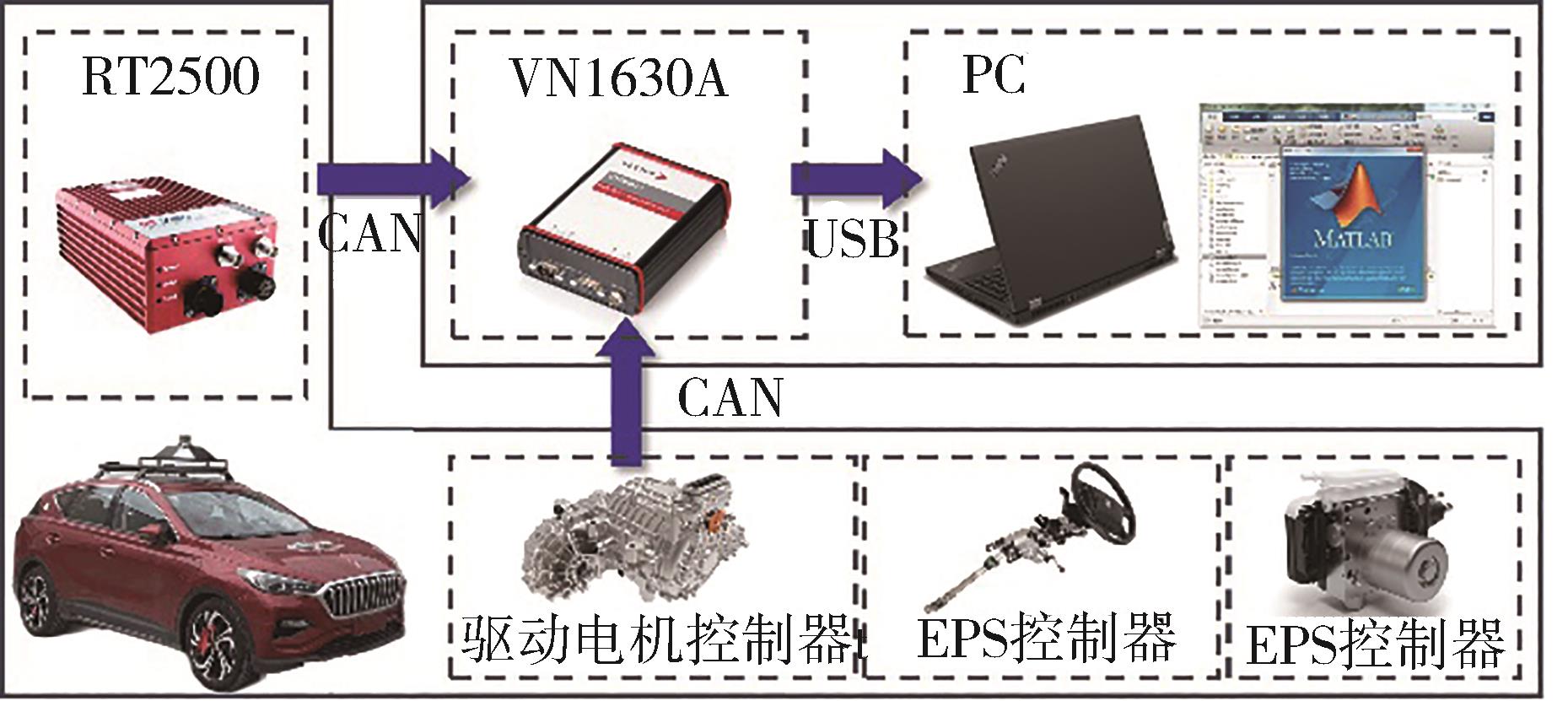

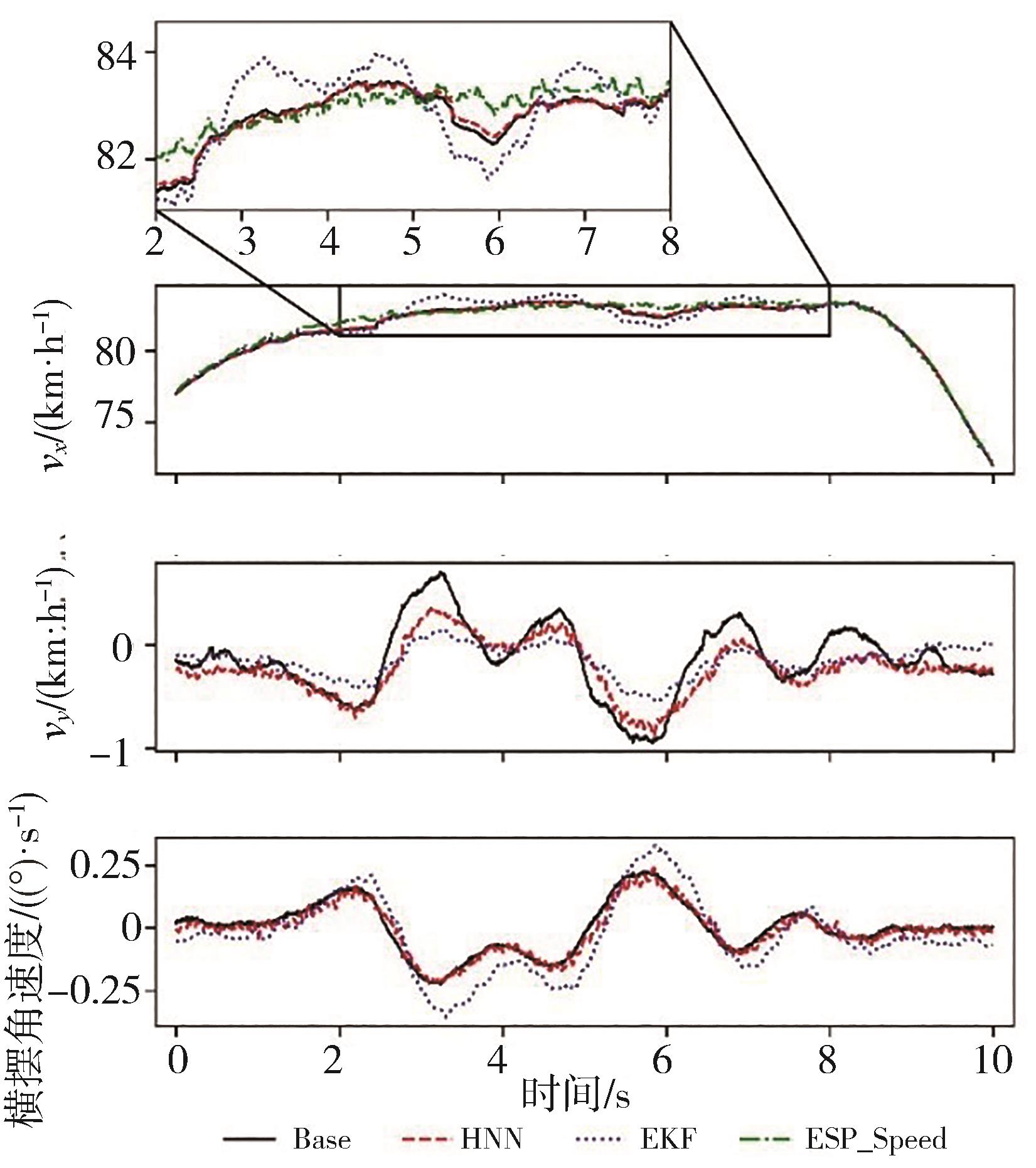
图18
实车DLC工况对比"
| 1 | GUO H Y, CAO D P, CHEN H, et al. Vehicle dynamic state estimation: state of the art schemes and perspectives [J]. IEEE-CAA J Automatica Sin, 2018, 5(2): 418-431. |
| 2 | PENDLETON S D, ANDERSEN H, DU X X, et al. Perception, planning, control, and coordination for autonomous vehicles [J]. Machines, 2017, 5(1): 54. |
| 3 | SINGH K B, ARAT M A, TAHERI S. Literature review and fundamental approaches for vehicle and tire state estimation[J]. Vehicle System Dynamics, 2019, 57(11): 1643-1665. |
| 4 | GUO H Y, CHEN H, XU F, et al. Implementation of EKF for vehicle velocities estimation on FPGA [J]. IEEE Transactions on Industrial Electronics, 2013, 60(9): 3823-3835. |
| 5 | KATRINIOK A, ABEL D. Adaptive EKF-based vehicle state estimation with online assessment of local observability [J]. IEEE Transactions on Control Systems Technology, 2016, 24(4): 1368-1381. |
| 6 | LIU J, WANG Z, ZHANG L, et al. Sideslip angle estimation of ground vehicles: a comparative study [J]. IET Control Theory & Applications, 2020, 14(20): 3490-3505. |
| 7 | KIM D, KIM G, CHOI S, et al. An integrated deep ensemble-unscented Kalman filter for sideslip angle estimation with sensor filtering network [J]. IEEE Access, 2021, 9: 149681-149689. |
| 8 | CHINDAMO D, LENZO B, GADOLA M. On the vehicle sideslip angle estimation: a literature review of methods, models, and innovations [J]. Applied Sciences, 2018, 8(3): 355. |
| 9 | 周卫琪, 齐翔, 陈龙, 等. 基于无迹卡尔曼滤波与遗传算法相结合的车辆状态估计 [J]. 汽车工程, 2019, 41(2): 198-205. |
| ZHOU W Q, QI X, CHEN L, et al. Vehicle state estimation based on the combination of unscented Kalman filtering and genetic algorithm[J]. Automotive Engineering, 2019, 41(2): 198-205. | |
| 10 | SCHMIDHUBER J. Deep learning in neural networks: an overview [J]. Neural Netw, 2015, 61: 85-117. |
| 11 | KUUTTI S, BOWDEN R, JIN Y, et al. A survey of deep learning applications to autonomous vehicle control [J]. IEEE Transactions on ITS, 2021, 22(2): 712-733. |
| 12 | ROKONUZZAMAN M, MOHAJER N, NAHAVANDI S, et al. Model predictive control with learned vehicle dynamics for autonomous vehicle path tracking [J]. IEEE Access, 2021, 9: 128233-128249. |
| 13 | PAN Y, NIE X, LI Z, et al. Data-driven vehicle modeling of longitudinal dynamics based on a multibody model and deep neural networks [J]. Measurement, 2021, 180: 109541. |
| 14 | CHINDAMO D, GADOLA M. Estimation of vehicle side-slip angle using an artificial neural network [C]. 2nd International Conference on Mechanical, Aeronautical and Automotive Engineering (ICMAA 2018). 2018.10.1051/matecconf/201816602001. |
| 15 | TONOLI A, AMATI N, GHOSH J. A deep learning based virtual sensor for vehicle sideslip angle estimation: experimental results [C]. SAE Paper 2018-01-1089. |
| 16 | SPIELBERG N A, BROWN M, KAPANIA N R, et al. Neural network vehicle models for high-performance automated driving [J]. Sci Robot, 2019, 4(28): 13. |
| 17 | LECUN Y, BENGIO Y, HINTON G. Deep learning [J]. Nature, 2015, 521(7553): 436-444. |
| 18 | SRINIVASAN S, SA I, ZYNER A, et al. End-to-end velocity estimation for autonomous racing [J]. IEEE Robotics and Automation Letters, 2020, 5(4): 6869-6875. |
| 19 | GONZALEZ L P, SANCHEZ S S, GARCIA-GUZMAN J, et al. Simultaneous estimation of vehicle roll and sideslip angles through a deep learning approach [J]. Sensors, 2020, 20(13): 18. |
| 20 | HOCHREITER S, SCHMIDHUBER J. Long short-term memory [J]. Neural Computation, 1997, 9(8): 1735-1780. |
| 21 | CHO K, VAN MERRI?NBOER B, GULCEHRE C, et al. Learning phrase representations using RNN encoder-decoder for statistical machine translation[C]. Proceedings of the EMNLP 2014 - 2014 Conference on Empirical Methods in Natural Language Processing,Proceedings of the Conference, F, 2014. |
| [1] | 高泽, 楚遵康, 石稼晟, 林滏, 饶卫雄, 余海燕. 基于图网络的汽车零部件应力场快速预测方法研究[J]. 汽车工程, 2024, 46(1): 170-178. |
| [2] | 胡明辉,朱广曜,刘长贺,唐国峰. 考虑迟滞特性的卡尔曼滤波和门控循环单元神经网络的锂离子电池SOC联合估计[J]. 汽车工程, 2023, 45(9): 1688-1701. |
| [3] | 刘卫国,项志宇,刘锐,李国栋,王子旭. 基于深度学习的端到端车辆运动规划方法研究[J]. 汽车工程, 2023, 45(8): 1343-1352. |
| [4] | 赵嘉豪,齐志权,齐智峰,王皓,何磊. 基于轮胎特征点的并行大型车辆朝向角计算[J]. 汽车工程, 2023, 45(6): 1031-1039. |
| [5] | 陈妍妍,王海,蔡英凤,陈龙,李祎承. 基于检测的高效自动驾驶实例分割方法[J]. 汽车工程, 2023, 45(4): 541-550. |
| [6] | 兰凤崇,陈继开,陈吉清,蒋心平,李子涵,潘威. 实车数据驱动的锂电池剩余使用寿命预测方法研究[J]. 汽车工程, 2023, 45(2): 175-182. |
| [7] | 李琳辉,张鑫亮,付一帆,连静,马家旭. 基于TC-YOLOv7算法的可见光与红外后融合检测研究[J]. 汽车工程, 2023, 45(12): 2280-2290. |
| [8] | 张小俊,奚敬哲,史延雷,袁安录. 面向路侧视角目标检测的轻量级YOLOv7-R算法[J]. 汽车工程, 2023, 45(10): 1833-1844. |
| [9] | 胡杰,李源洁,耿號,耿黄政,郭雄,易红卫. 基于深度学习的汽车故障知识图谱构建[J]. 汽车工程, 2023, 45(1): 52-60. |
| [10] | 胡杰,徐博远,熊宗权,昌敏杰,郭迪,谢礼浩. 基于多尺度掩码分类域自适应网络的跨域目标检测算法[J]. 汽车工程, 2022, 44(9): 1327-1338. |
| [11] | 毕贵红,谢旭,蔡子龙,骆钊,陈臣鹏,赵鑫. 动态条件下基于深度学习的锂电池容量估计[J]. 汽车工程, 2022, 44(6): 868-878. |
| [12] | 王大方,杜京东,曹江,张梅,赵刚. 面向自动驾驶数据生成的风格迁移网络研究[J]. 汽车工程, 2022, 44(5): 684-690. |
| [13] | 郭景华,何智飞,罗禹贡,李克强. 人机混驾环境下基于深度学习的车辆切入轨迹预测[J]. 汽车工程, 2022, 44(2): 153-160. |
| [14] | 蒋渊德,朱冰,赵祥模,赵健,郑兵兵. 面向自动驾驶汽车测试的交通车辆交互过程建模[J]. 汽车工程, 2022, 44(12): 1825-1833. |
| [15] | 秦大同,王康,冯继豪,刘永刚,程坤,夏玉. 基于无迹卡尔曼滤波和门控循环单元的道路坡度估计[J]. 汽车工程, 2022, 44(10): 1547-1555. |
|