汽车工程 ›› 2022, Vol. 44 ›› Issue (10): 1547-1555.doi: 10.19562/j.chinasae.qcgc.2022.10.009
所属专题: 底盘&动力学&整车性能专题2022年
秦大同( ),王康,冯继豪,刘永刚,程坤,夏玉
),王康,冯继豪,刘永刚,程坤,夏玉
Datong Qin(),Kang Wang,Jihao Feng,Yonggang Liu,Kun Cheng,Yu Xia
摘要:
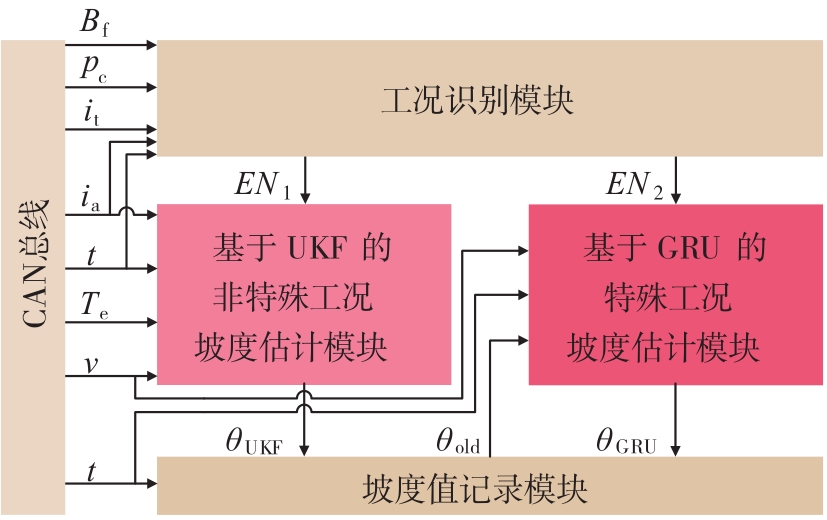
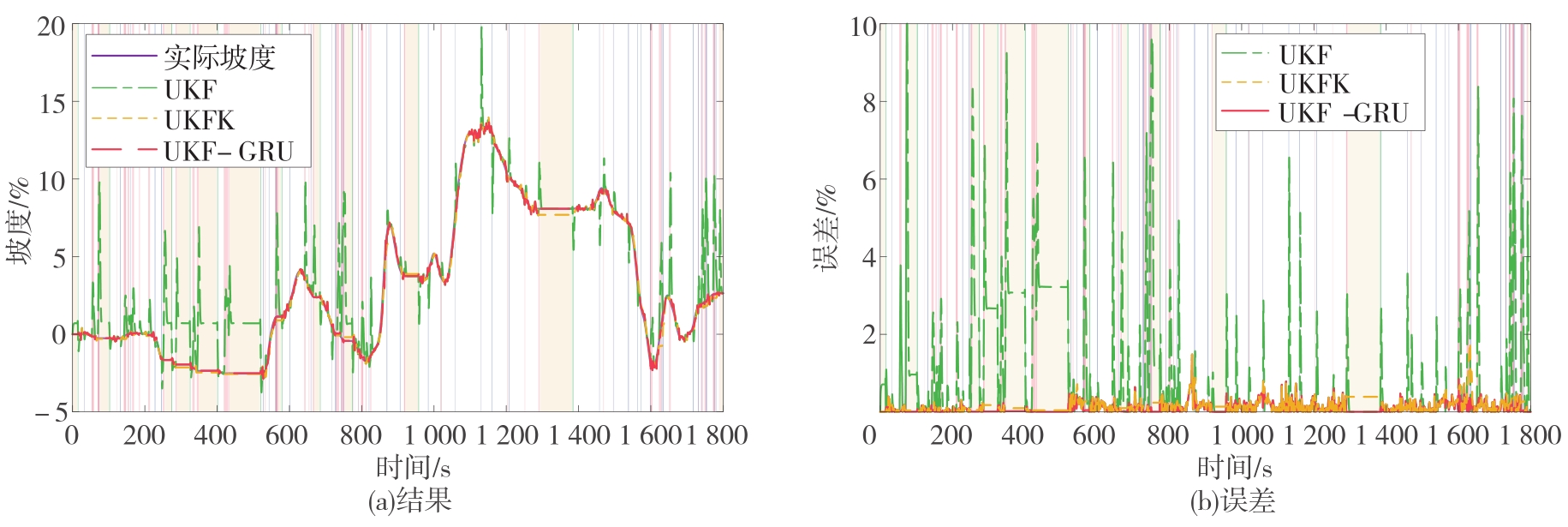
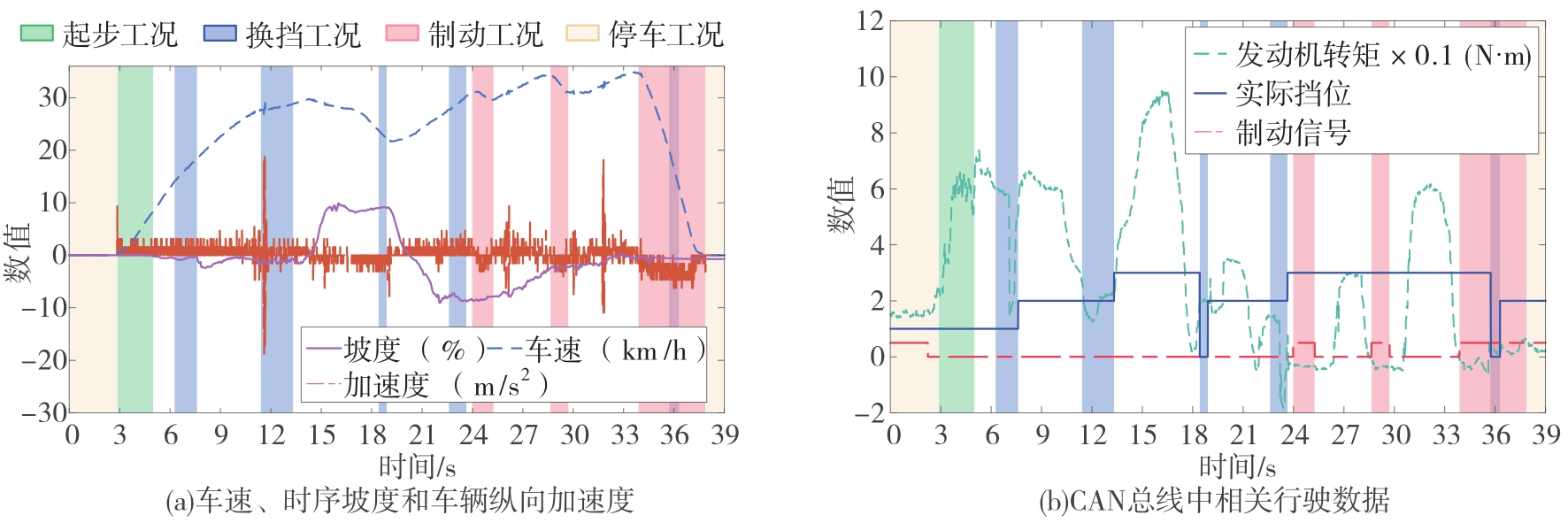
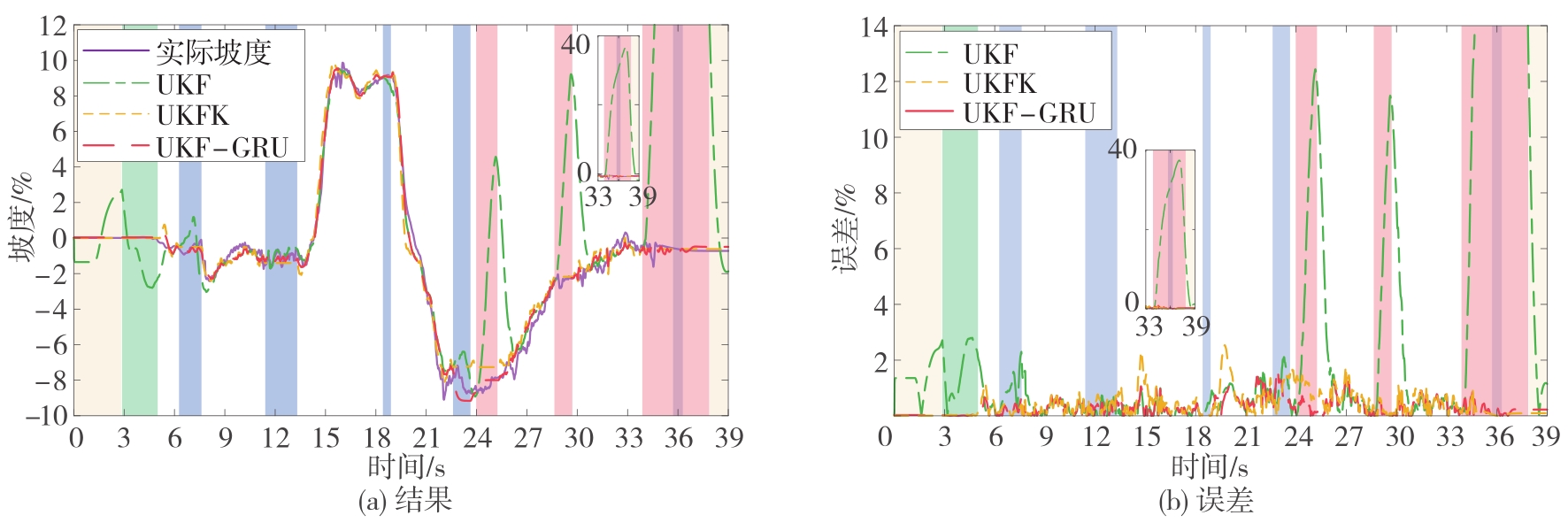
针对外接激光雷达等传感器普适性差,而传统道路坡度估计方法仅根据车载CAN总线数据在车辆起步、换挡、制动和停车4种特殊工况中的估计误差较大的问题,提出了一种基于无迹卡尔曼滤波(UKF)和门控循环单元(GRU)的道路坡度估计方法。根据车速等数据识别工况,在非特殊工况下,建立车辆动力学模型并采用UKF来估计坡度;在特殊工况下,将规律性不稳定的时序坡度转换为距序坡度,并利用GRU进行短距坡度预测。仿真和实车试验结果表明:在非特殊工况下,该方法通过UKF可准确估计道路坡度;在特殊工况下,该方法通过GRU可有效跟踪距序坡度变化趋势,显著提高了道路坡度估计精度。