汽车工程 ›› 2022, Vol. 44 ›› Issue (11): 1665-1675.doi: 10.19562/j.chinasae.qcgc.2022.11.005
所属专题: 智能网联汽车技术专题-规划&控制2022年
王玮琛,李军求( ),孙逢春,宋健,吴永华
),孙逢春,宋健,吴永华
Weichen Wang,Junqiu Li(),Fengchun Sun,Jian Song,Yonghua Wu
摘要:
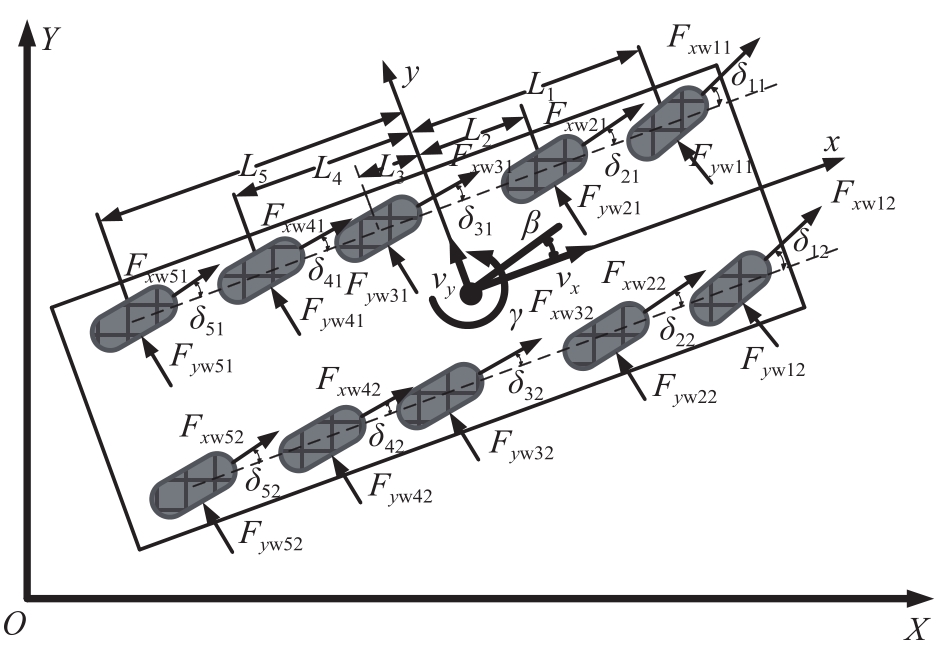
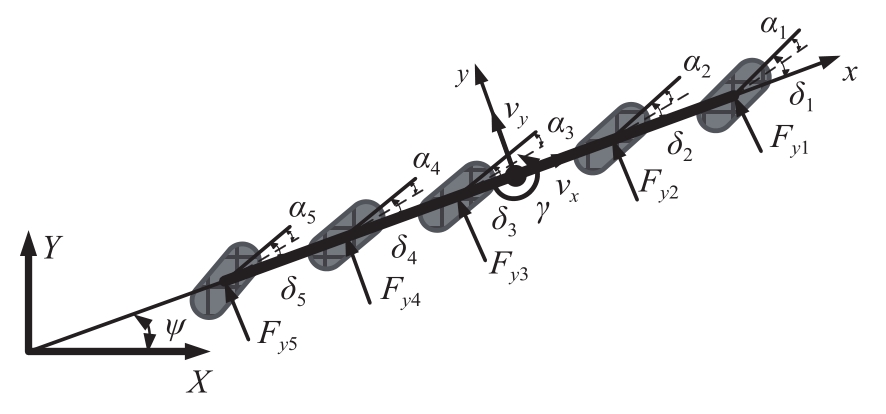
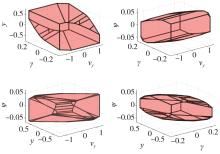
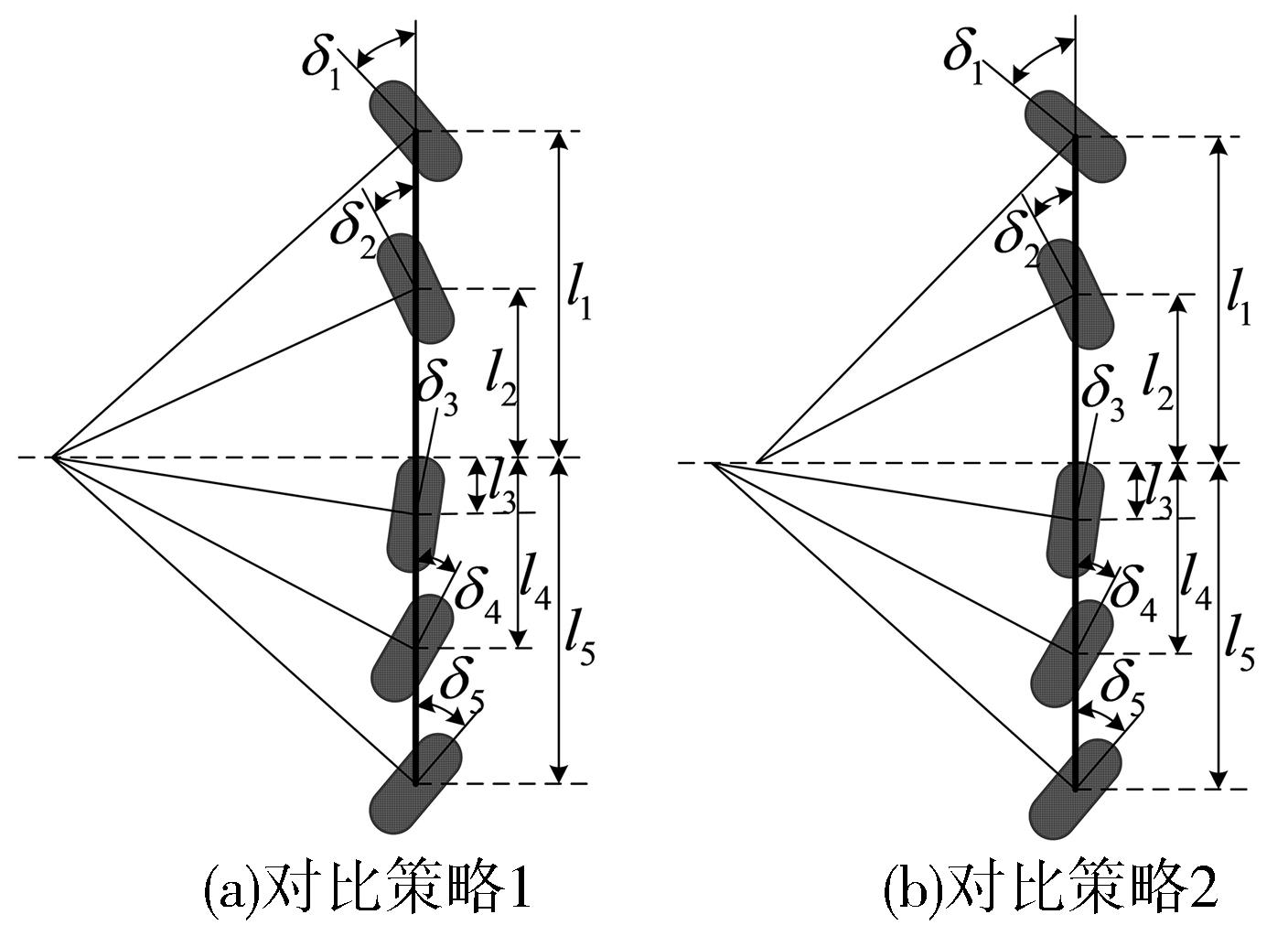
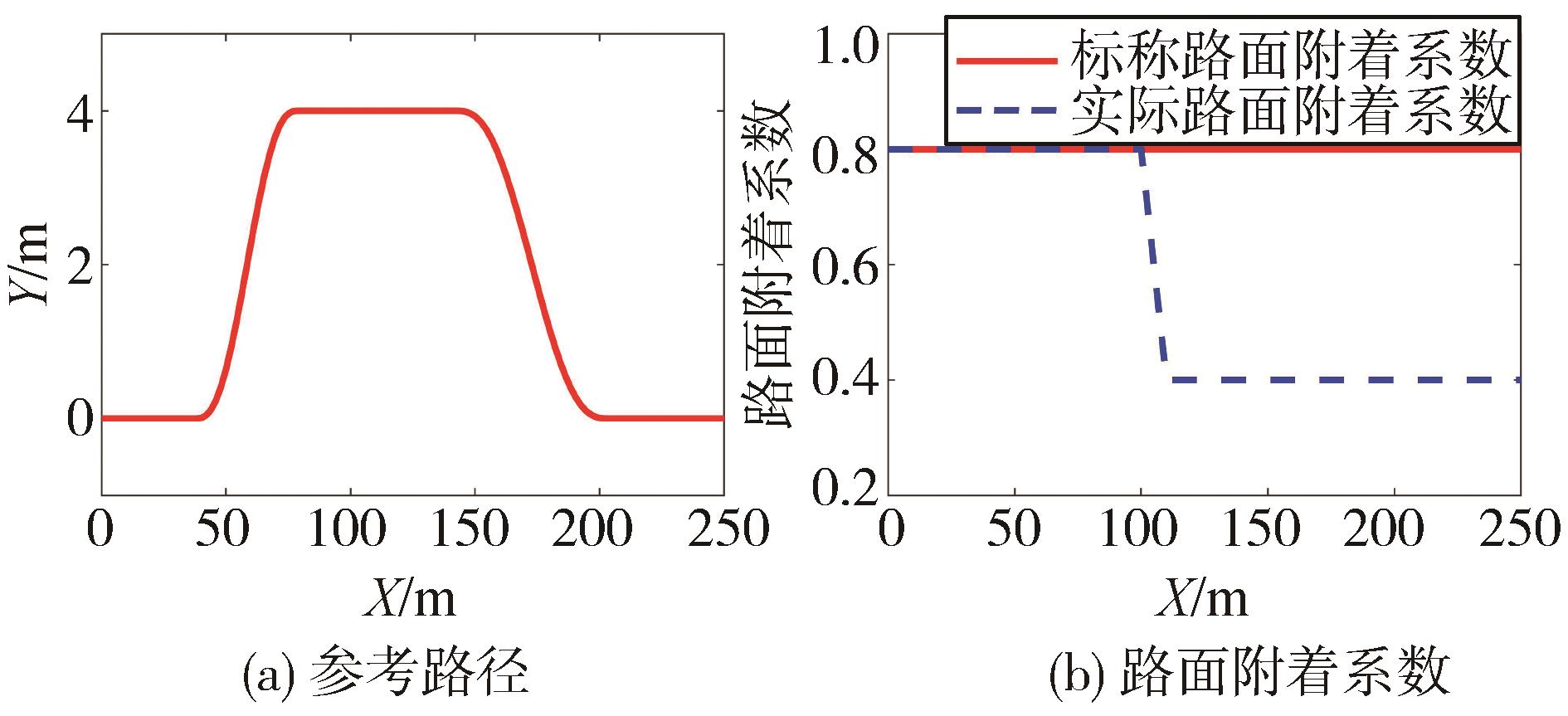
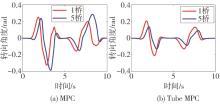
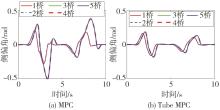
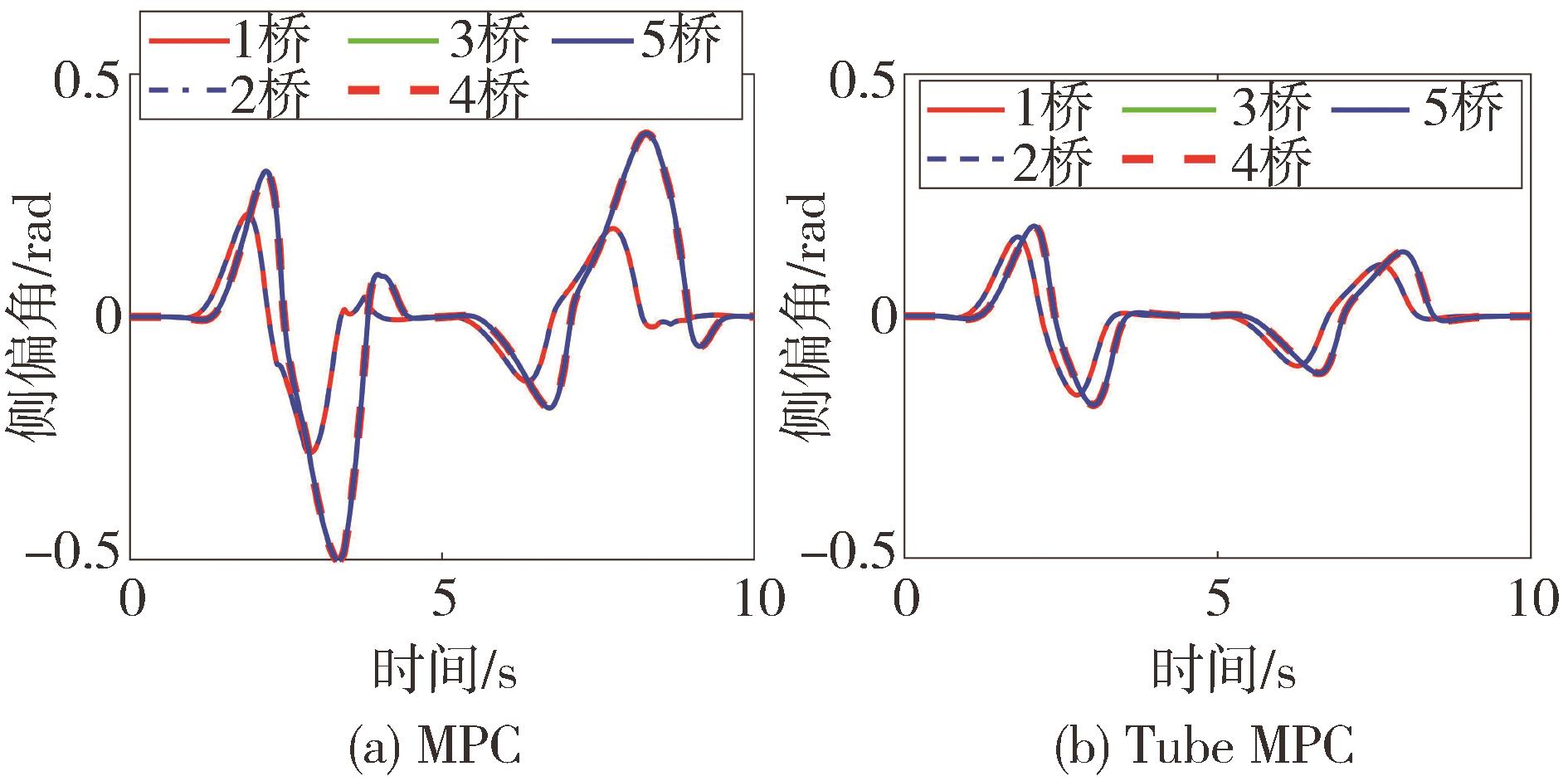
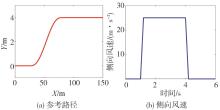
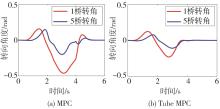
本文中为具有智能驾驶功能的五轴重型车辆提出一种基于鲁棒不变集的模型预测控制(Tube MPC)的全轮转向路径跟踪策略。首先提出了基于第1桥和第5桥转角控制的全轮转向路径跟踪策略,使多轴车的控制更灵活,侧向力响应可实现同步且能得到充分利用。接着控制模型考虑轮胎参数不确定和侧向风产生的有界干扰,采用 Tube MPC 求解路径跟踪问题。同时采用基于支撑函数计算的简化最小鲁棒正不变集(mRPI)代替了通用的基于Minkowski求和的mRPI运算,有效地节约了mRPI的离线计算时间,也减少了不变集的顶点个数,以保证Tube MPC的在线实现。最后进行硬件在环仿真,验证了所提基于Tube MPC的全轮转向策略对比普通的全轮转向策略具有更高的路径跟踪精度和车辆稳定性,面对未知干扰时有更强的鲁棒性。