汽车工程 ›› 2021, Vol. 43 ›› Issue (7): 987-994.doi: 10.19562/j.chinasae.qcgc.2021.07.005
高强1,陆洲1,段晨东2,徐婷1( )
)
Qiang Gao1,Zhou Lu1,Chendong Duan2,Ting Xu1()
摘要:
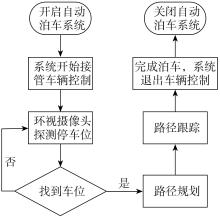
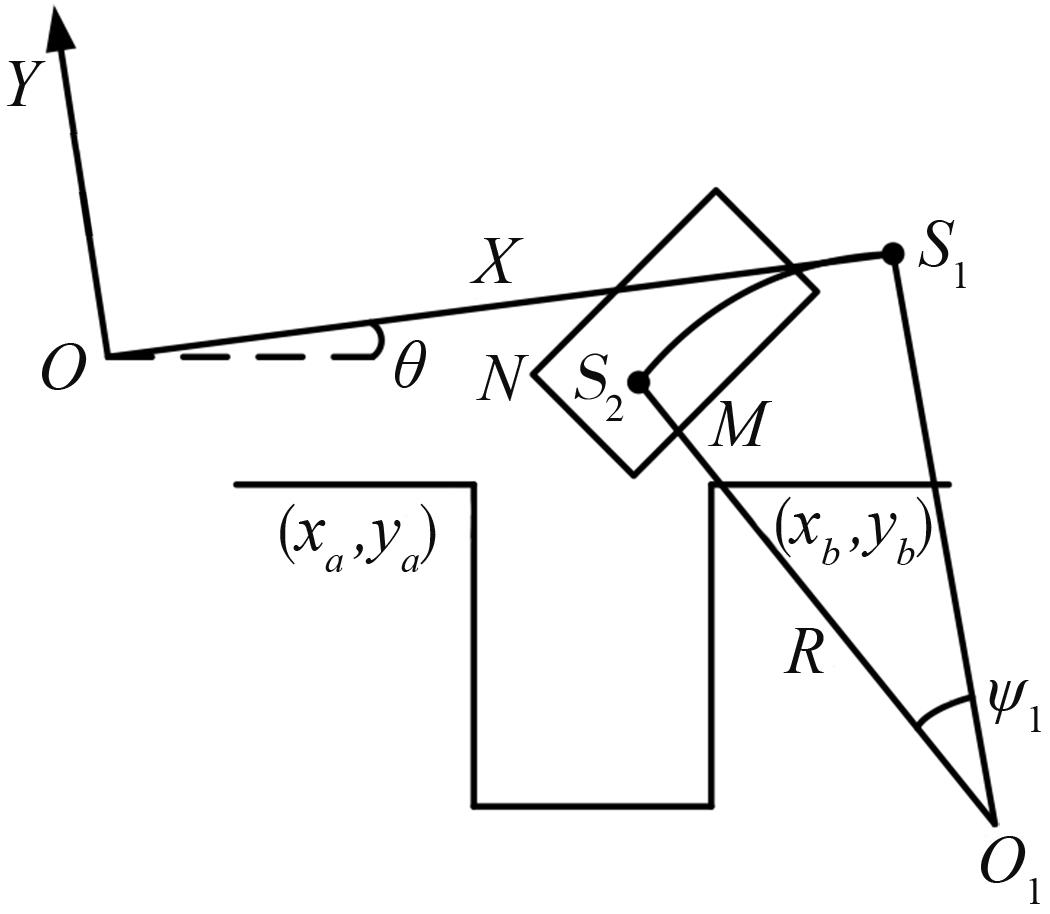
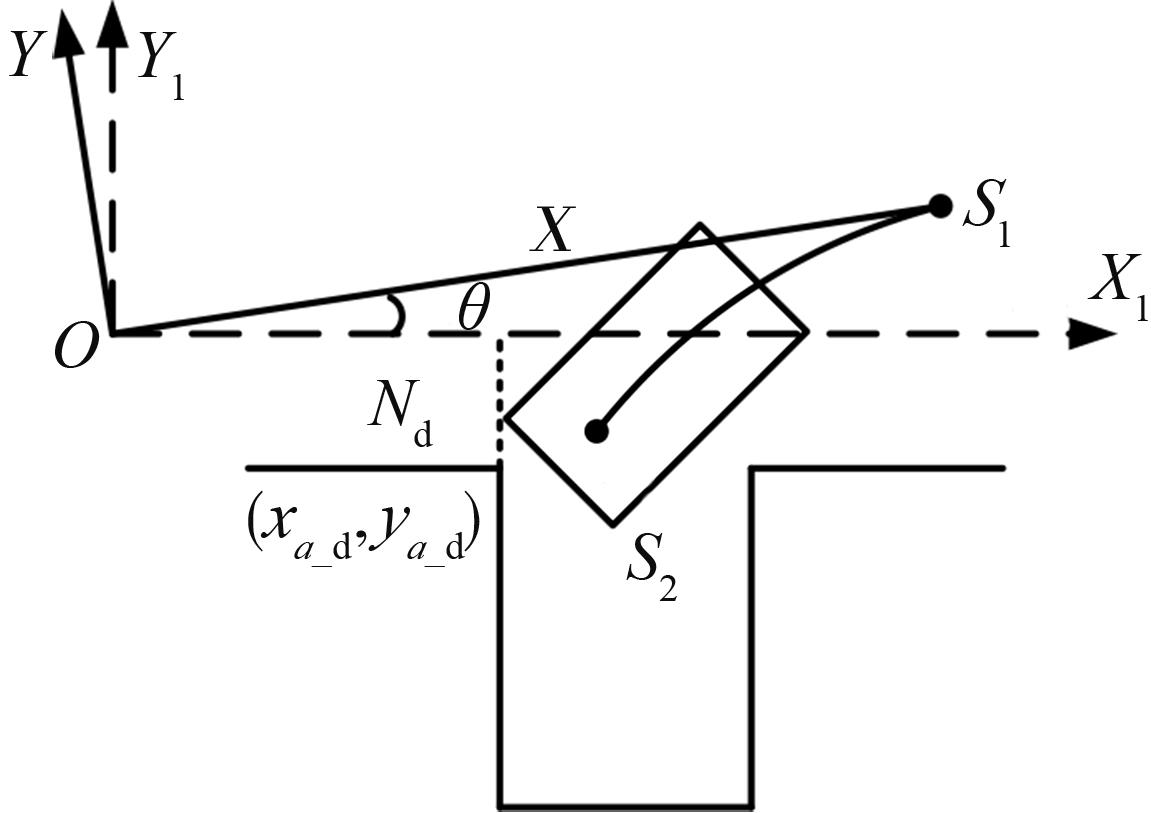
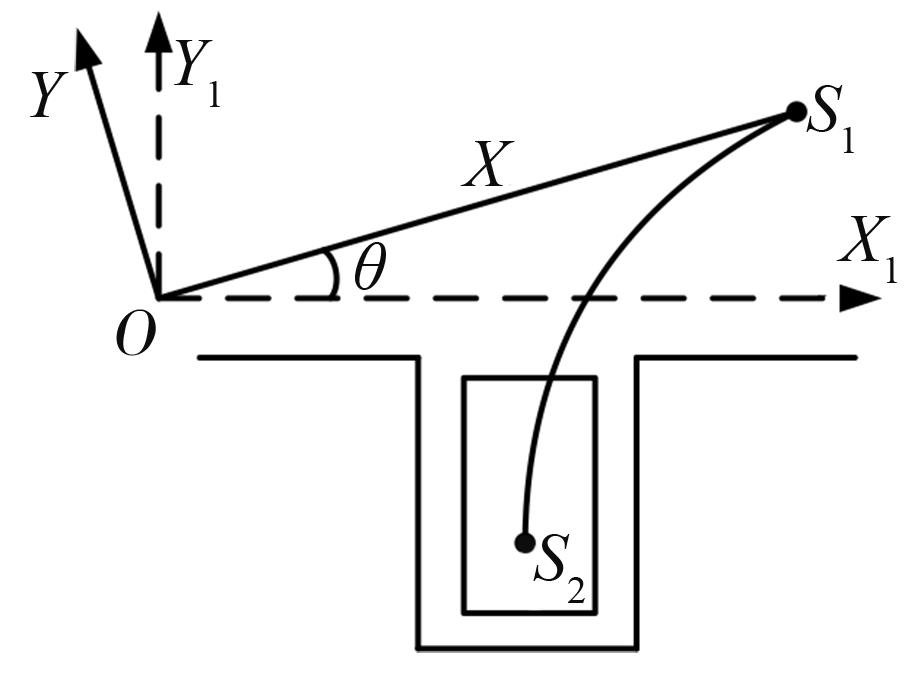
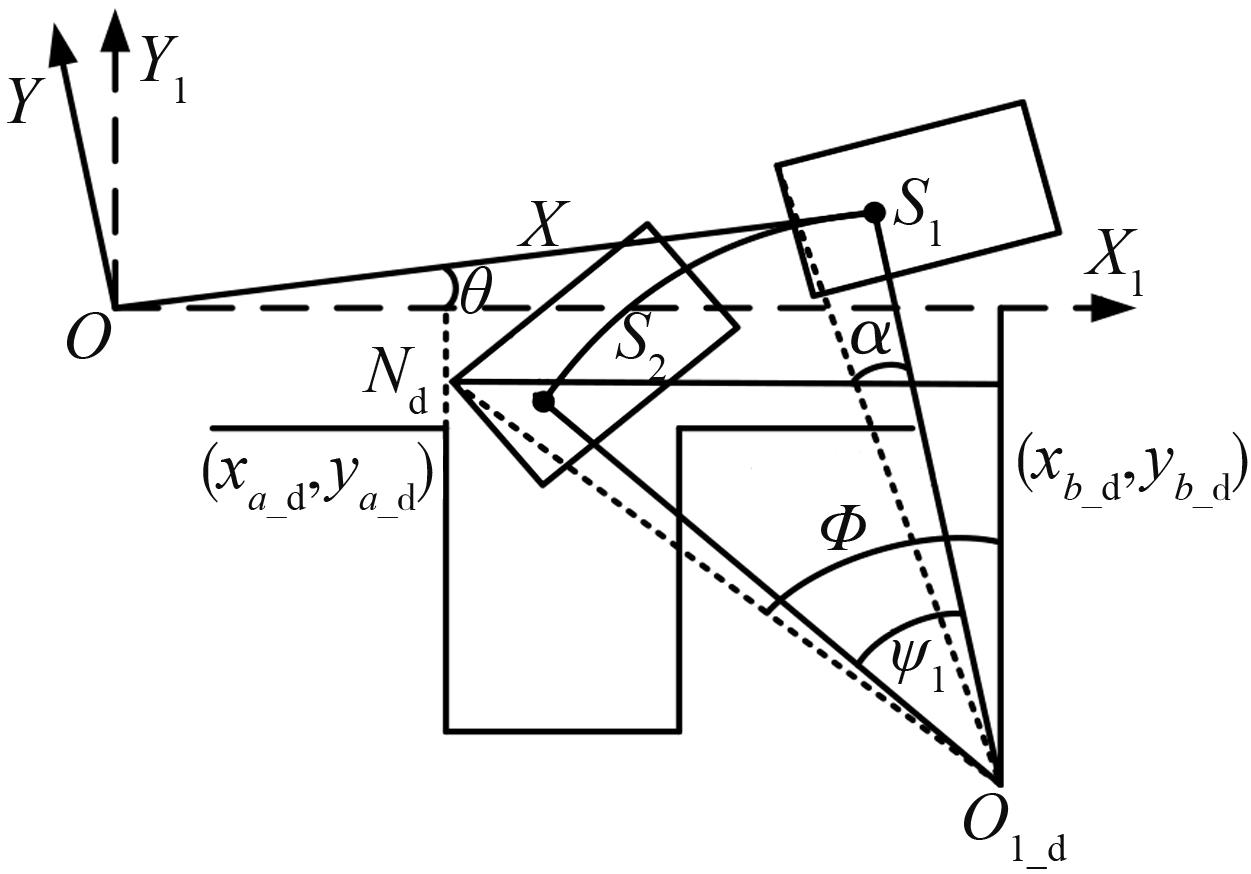
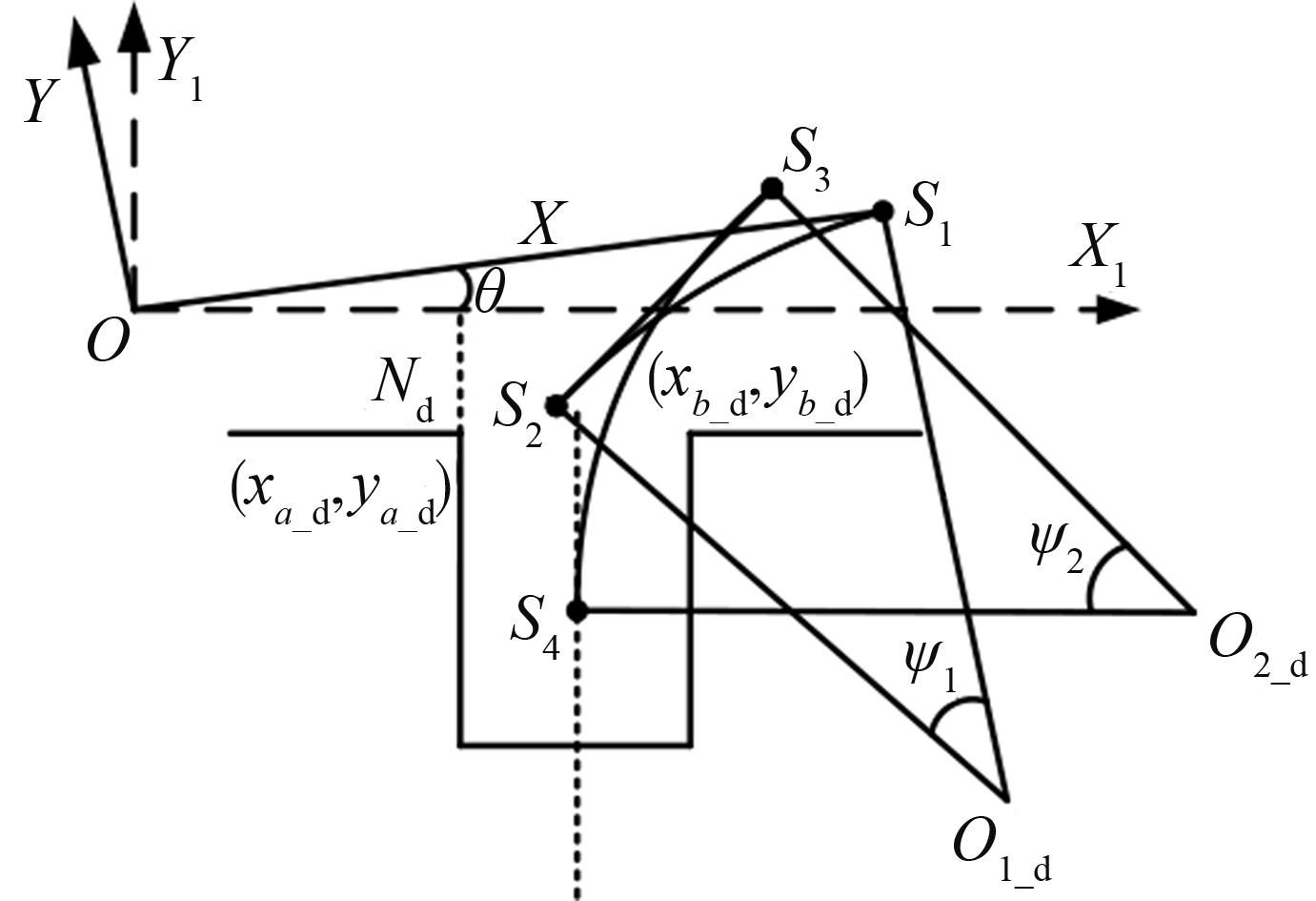
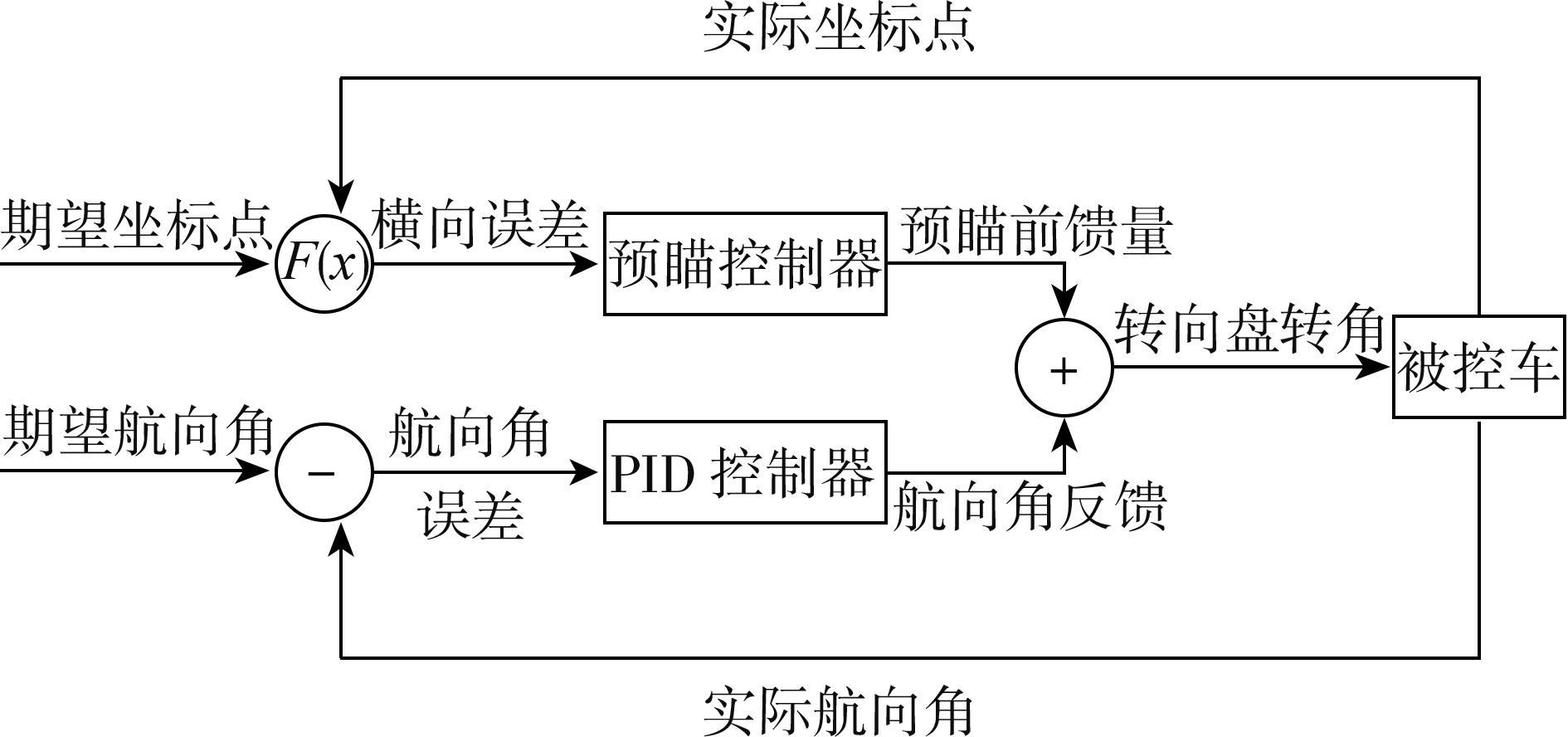
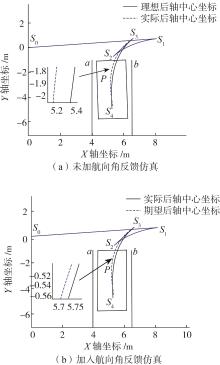
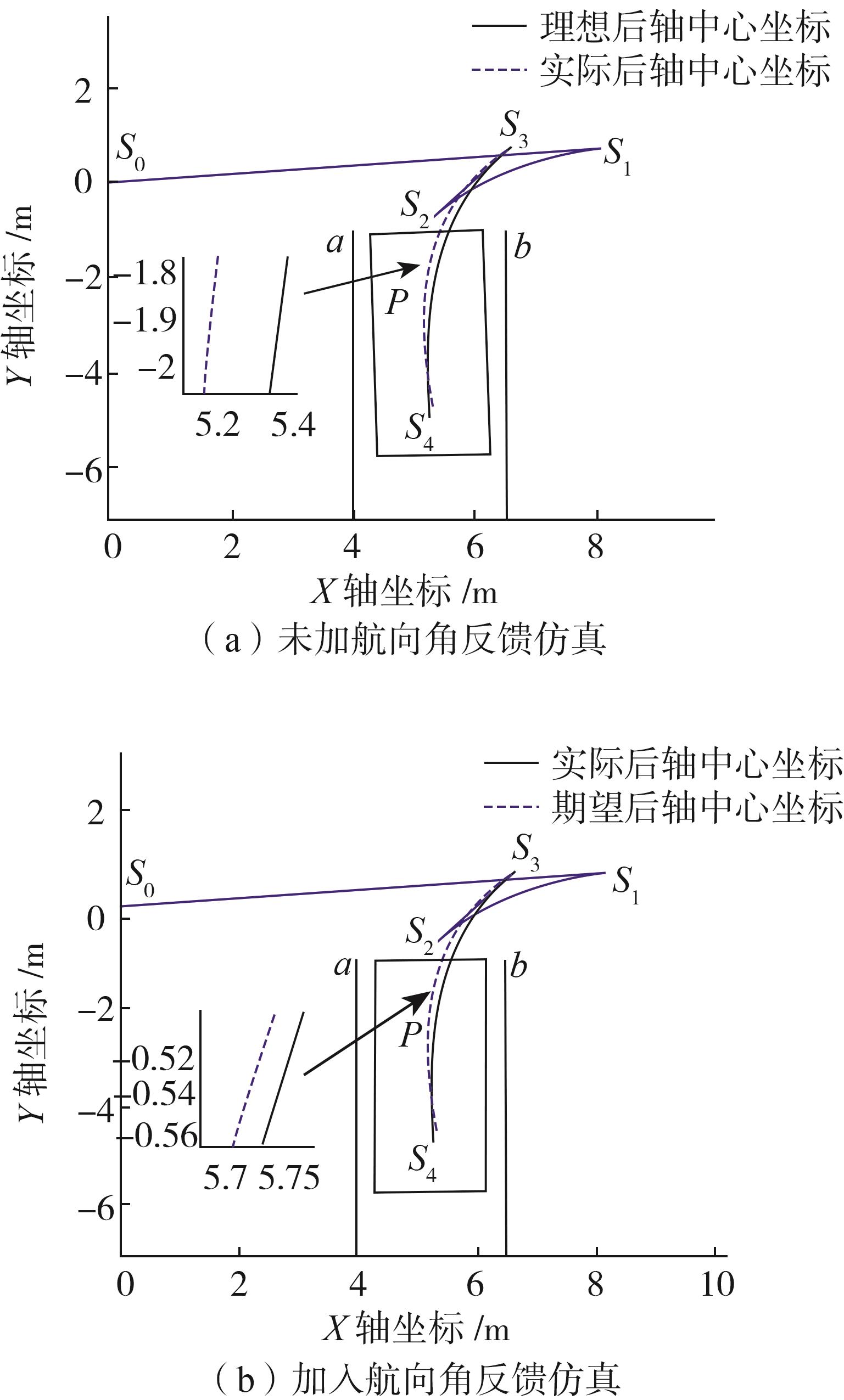
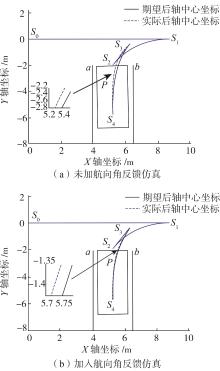
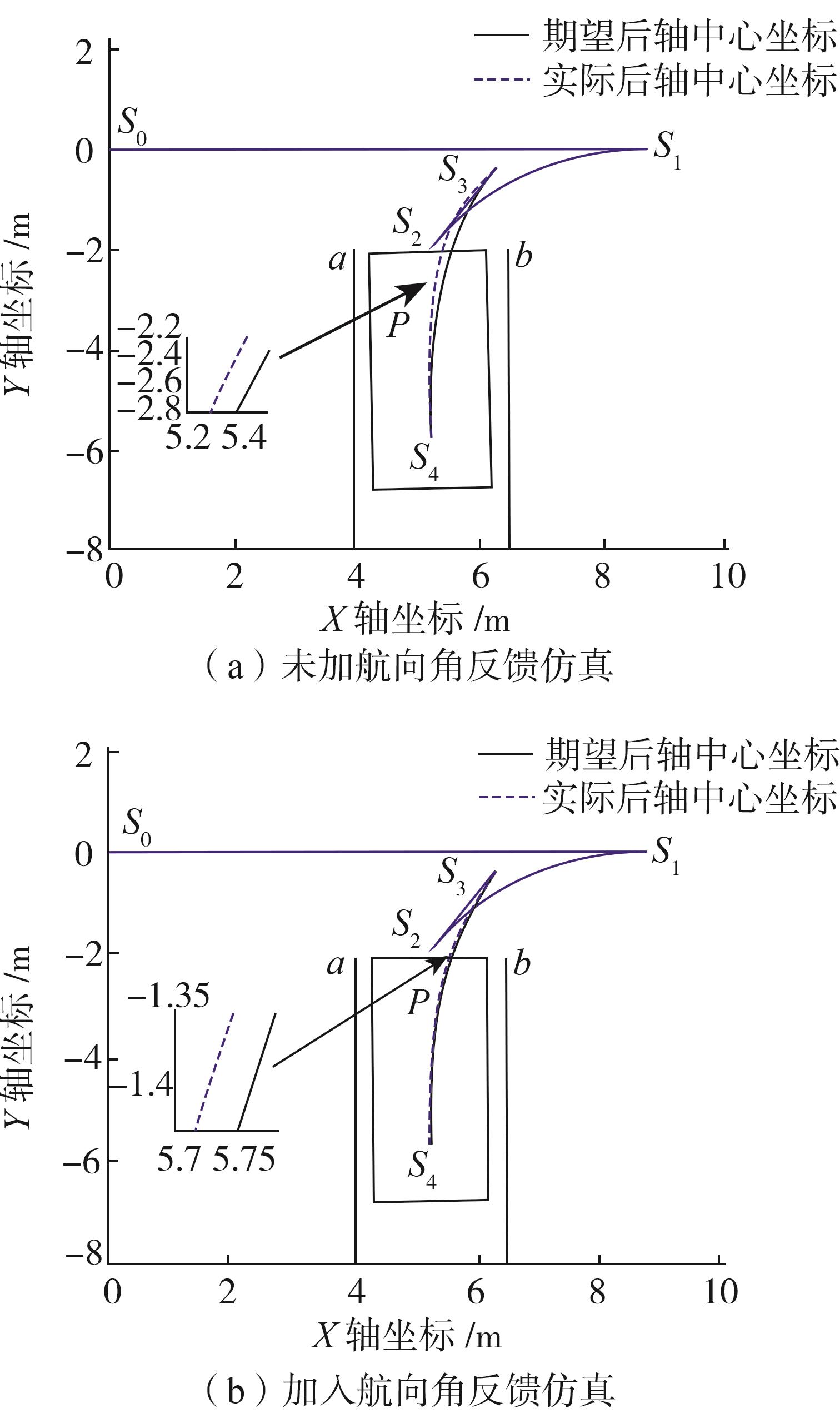
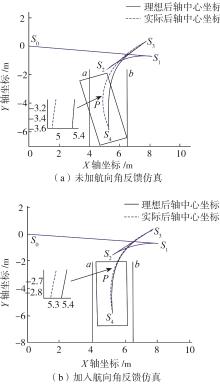
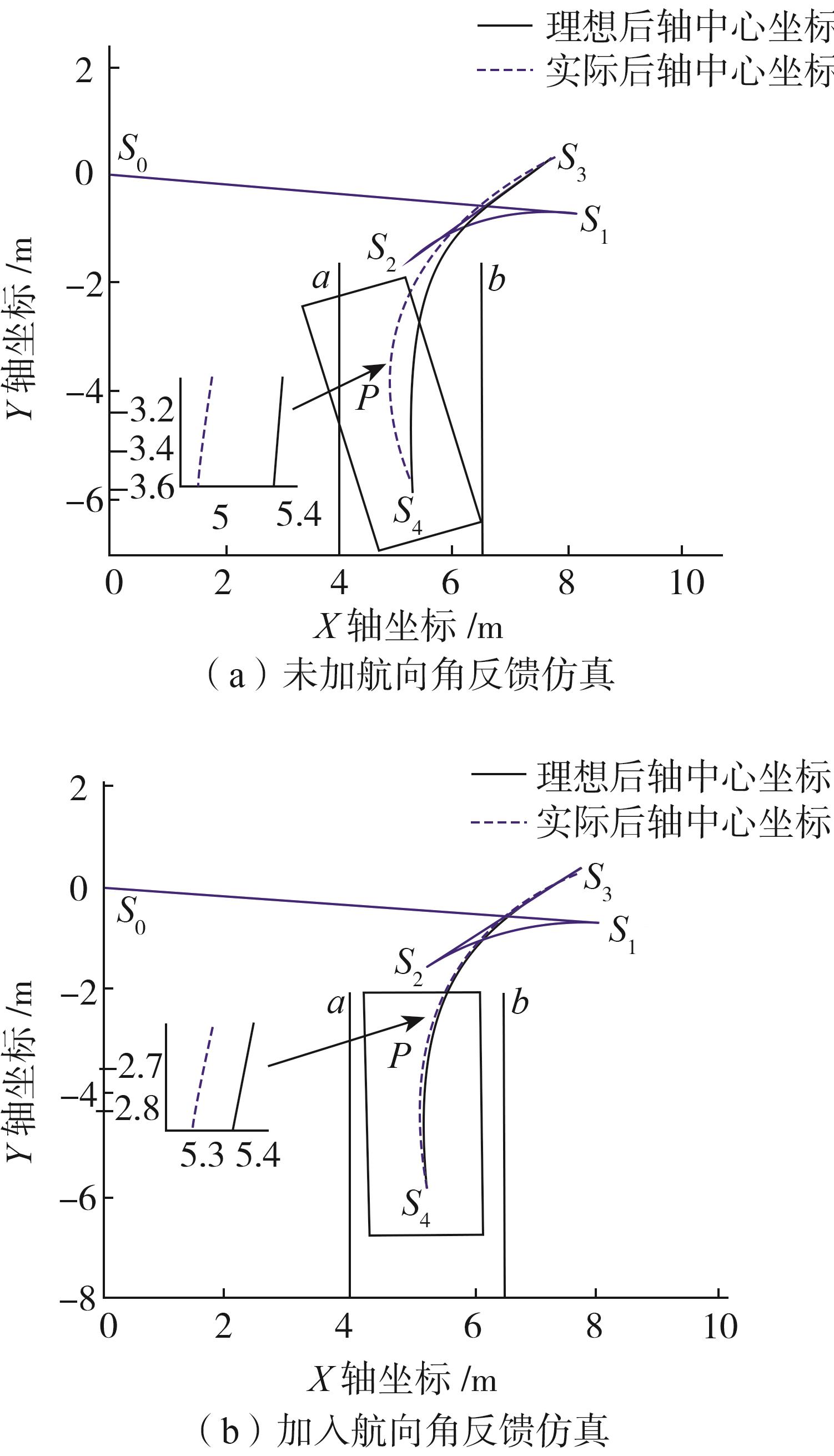
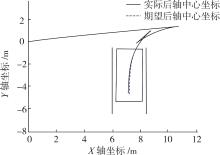
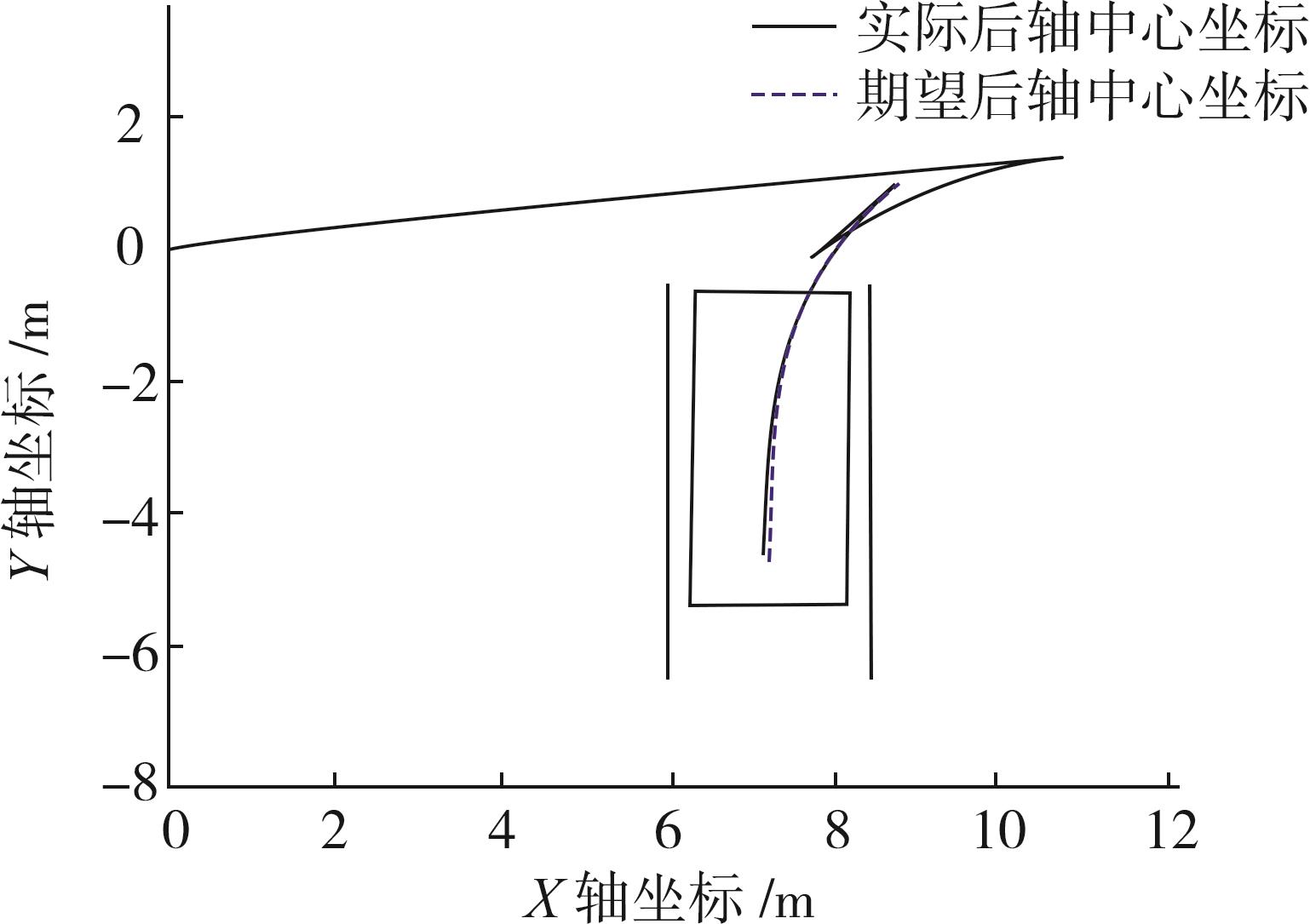
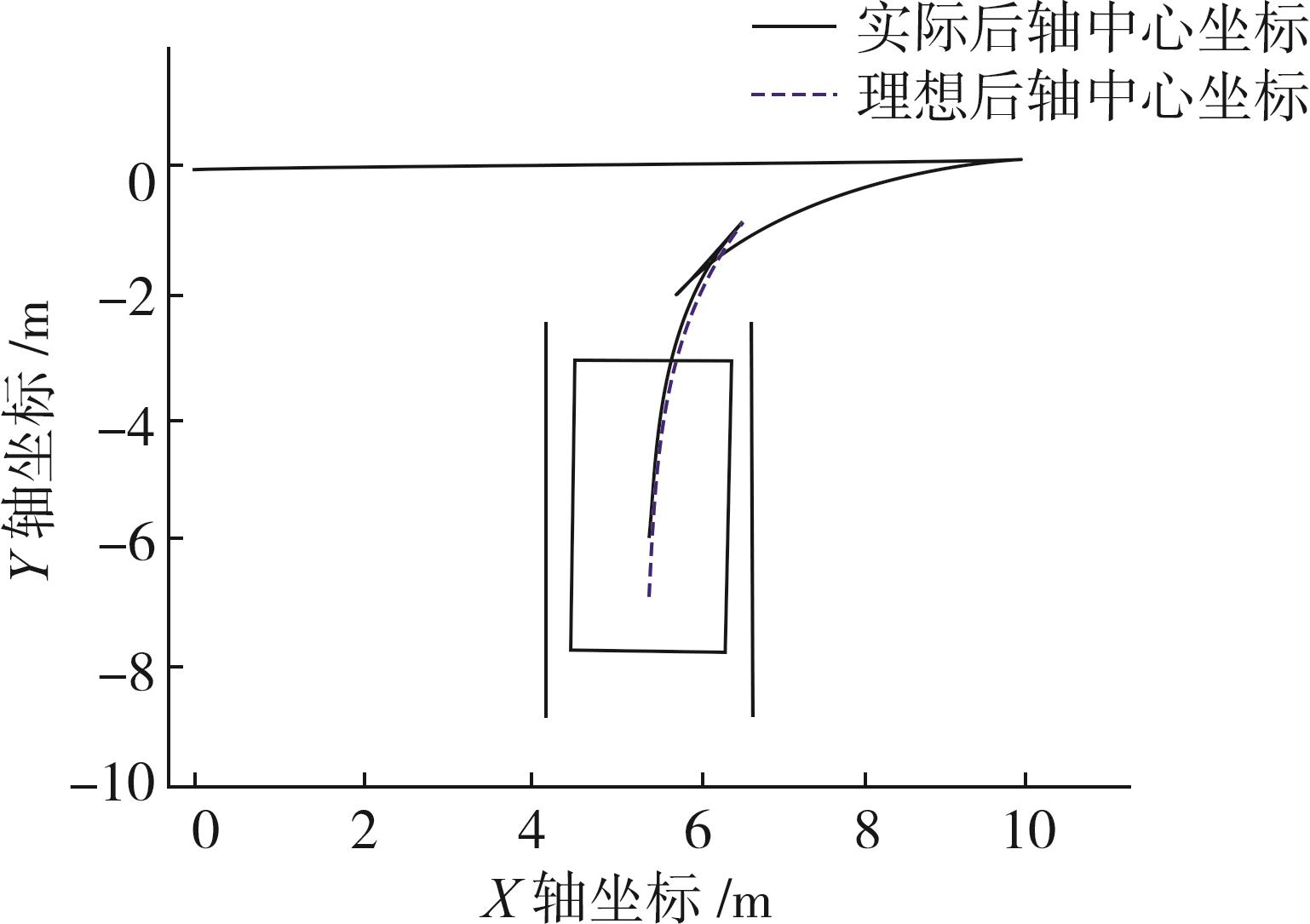
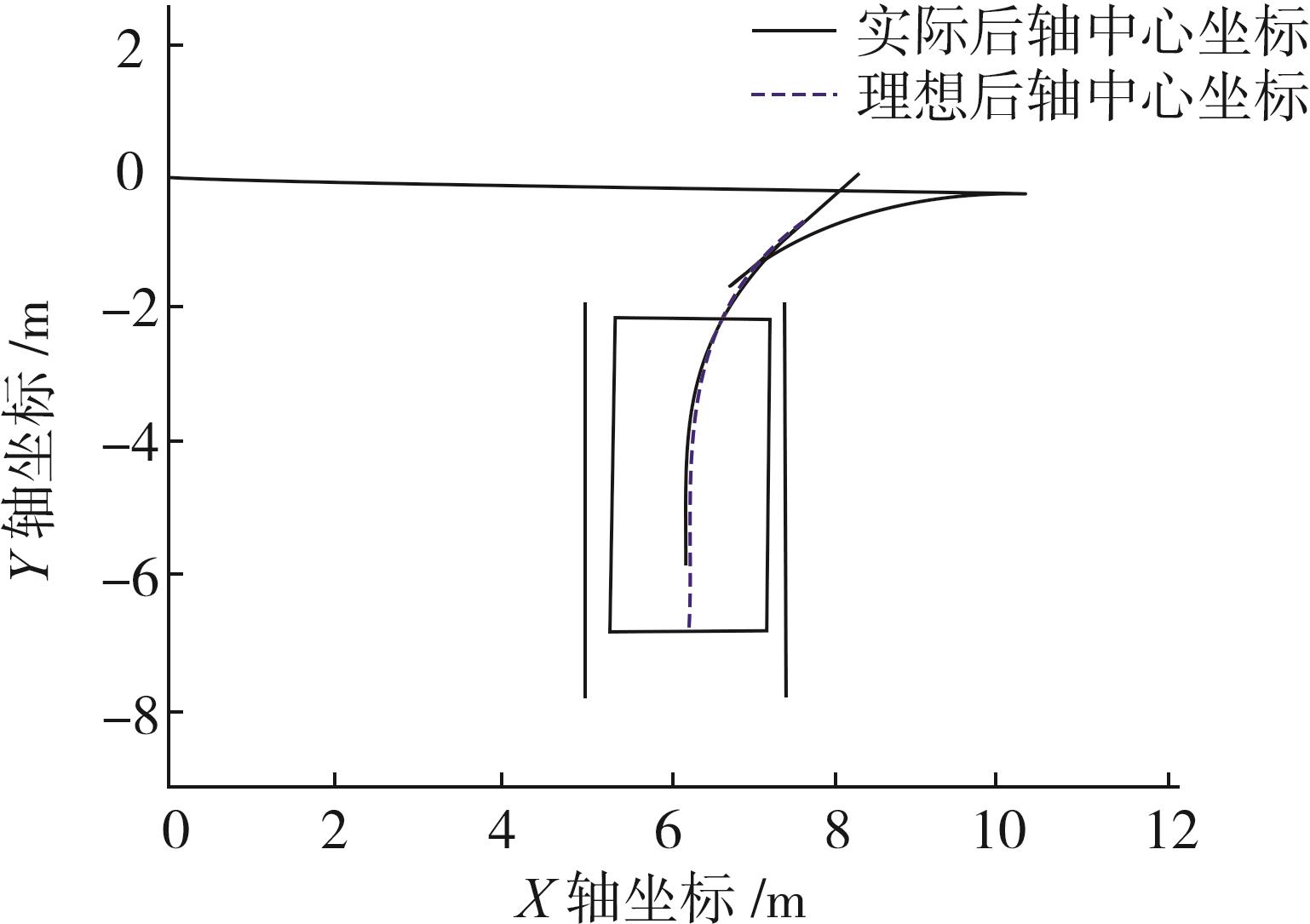
自动泊车系统(APS)是智能汽车研究中一项重要的内容。当前大部分垂直自动泊车算法未考虑汽车初始位置航向角误差的影响,导致实际泊车时效果不理想或发生剐蹭事故。针对这一问题,本文中研究了汽车初始位置航向角存在误差(即初始位置航向角不为零)时的垂直泊车路径规划和路径跟踪方法。首先利用四次样条函数对泊车路径进行规划,改善路径特征,然后为改进目前常用的预瞄误差前馈跟踪算法对变曲率路径跟踪误差较大、且滞后较明显的缺点,设计了预瞄误差前馈与航向角反馈相结合的泊车路径跟踪控制算法。通过Simulink/CarSim联合仿真和实车试验对所提出的泊车算法进行了验证,仿真及实车试验结果均表明,当汽车初始位置航向角不为零时,所提出的算法能够规划出可行泊车路径,而预瞄误差前馈与航向角反馈相结合的路径跟踪控制算法较单一的预瞄误差前馈控制方法跟踪误差更小,最终泊车位姿更理想。