汽车工程 ›› 2022, Vol. 44 ›› Issue (7): 1040-1048.doi: 10.19562/j.chinasae.qcgc.2022.07.010
所属专题: 智能网联汽车技术专题-规划&控制2022年
胡杰1,2,3( ),朱令磊1,2,3,陈瑞楠1,2,3,钟鑫凯1,2,3,徐文才1,2,3,张敏超1,2,3
),朱令磊1,2,3,陈瑞楠1,2,3,钟鑫凯1,2,3,徐文才1,2,3,张敏超1,2,3
Jie Hu1,2,3(),Linglei Zhu1,2,3,Ruinan Chen1,2,3,Xinkai Zhong1,2,3,Wencai Xu1,2,3,Minchao Zhang1,2,3
摘要:
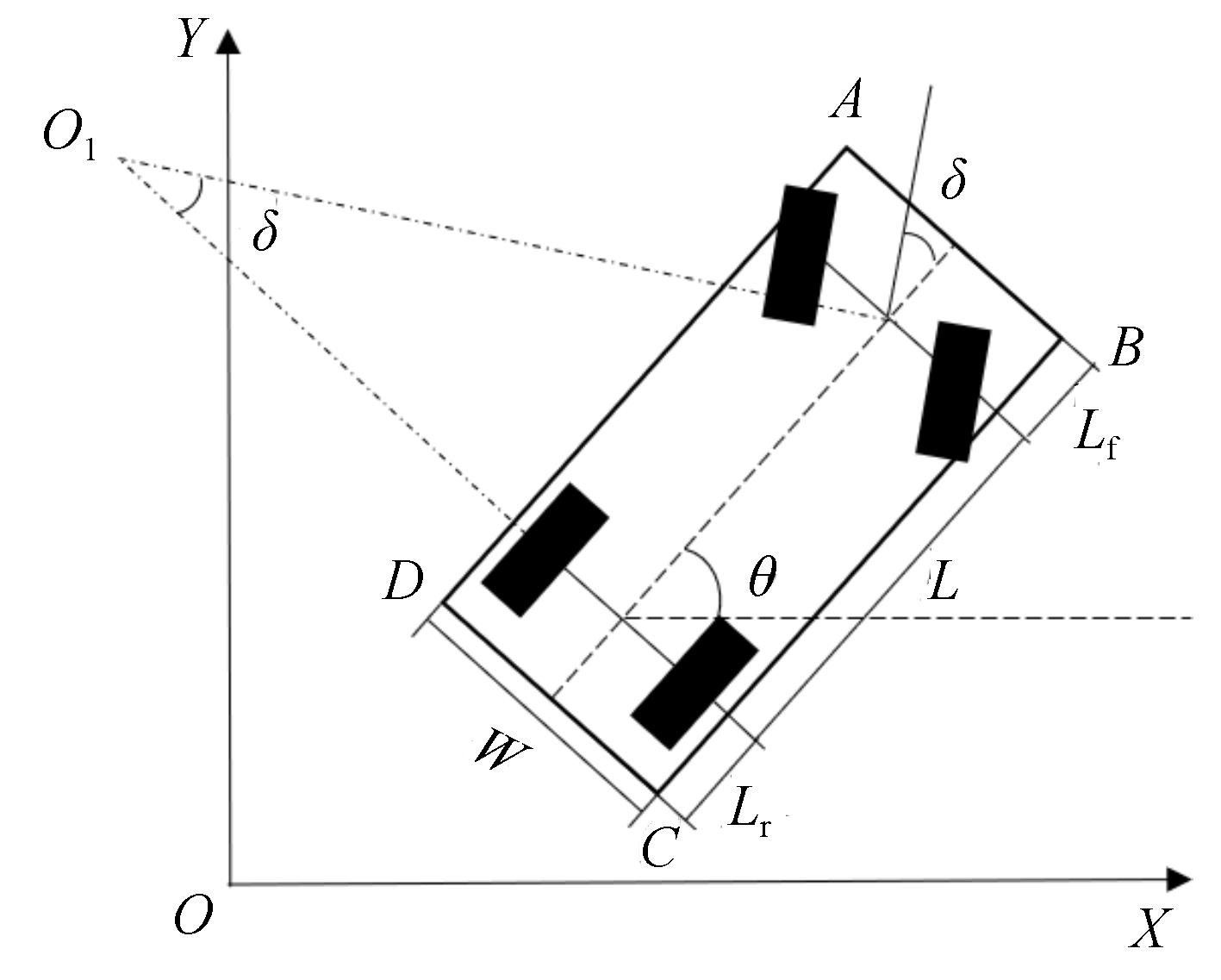
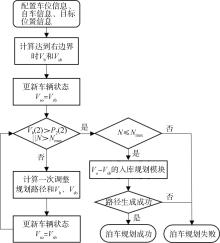
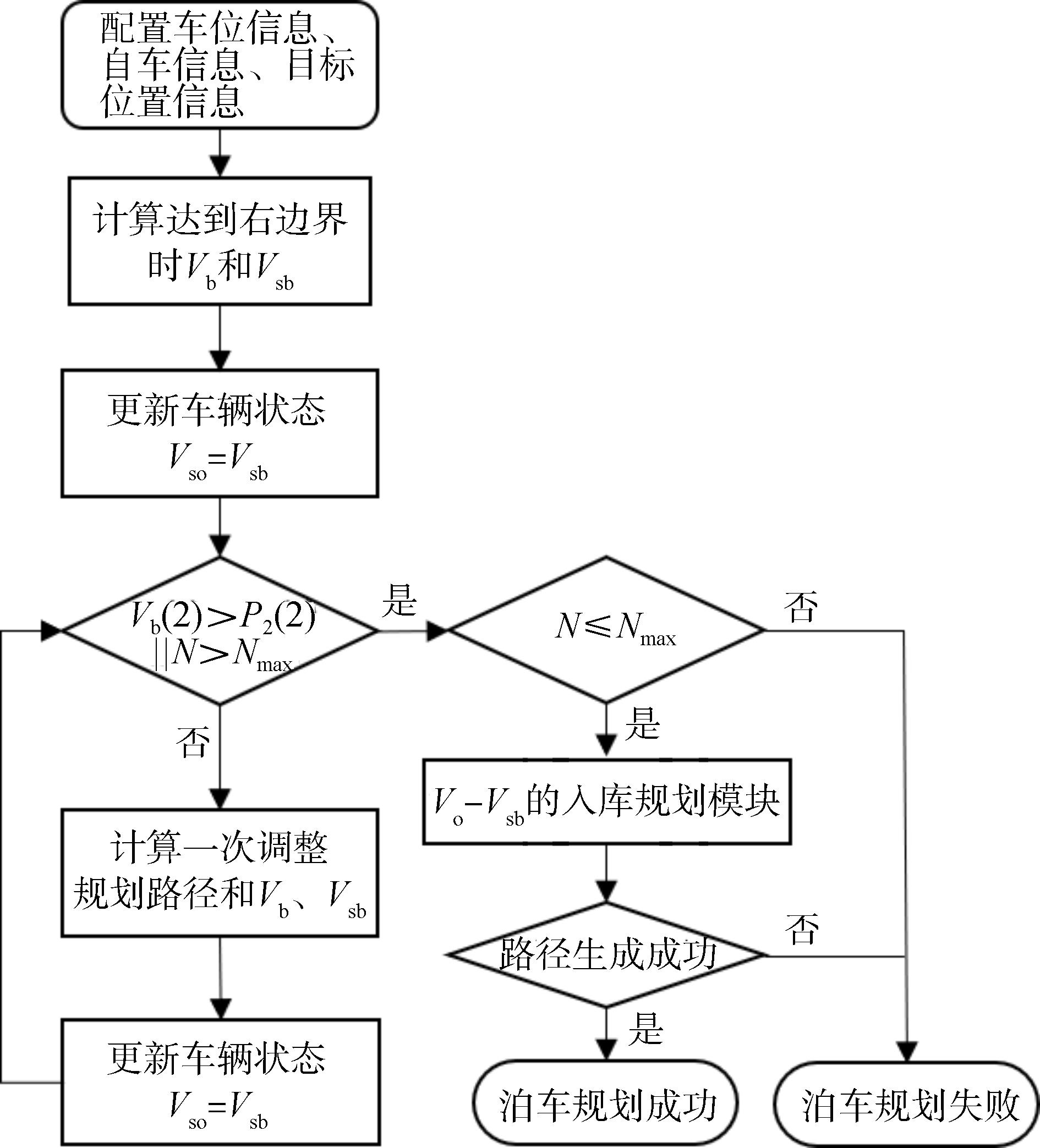
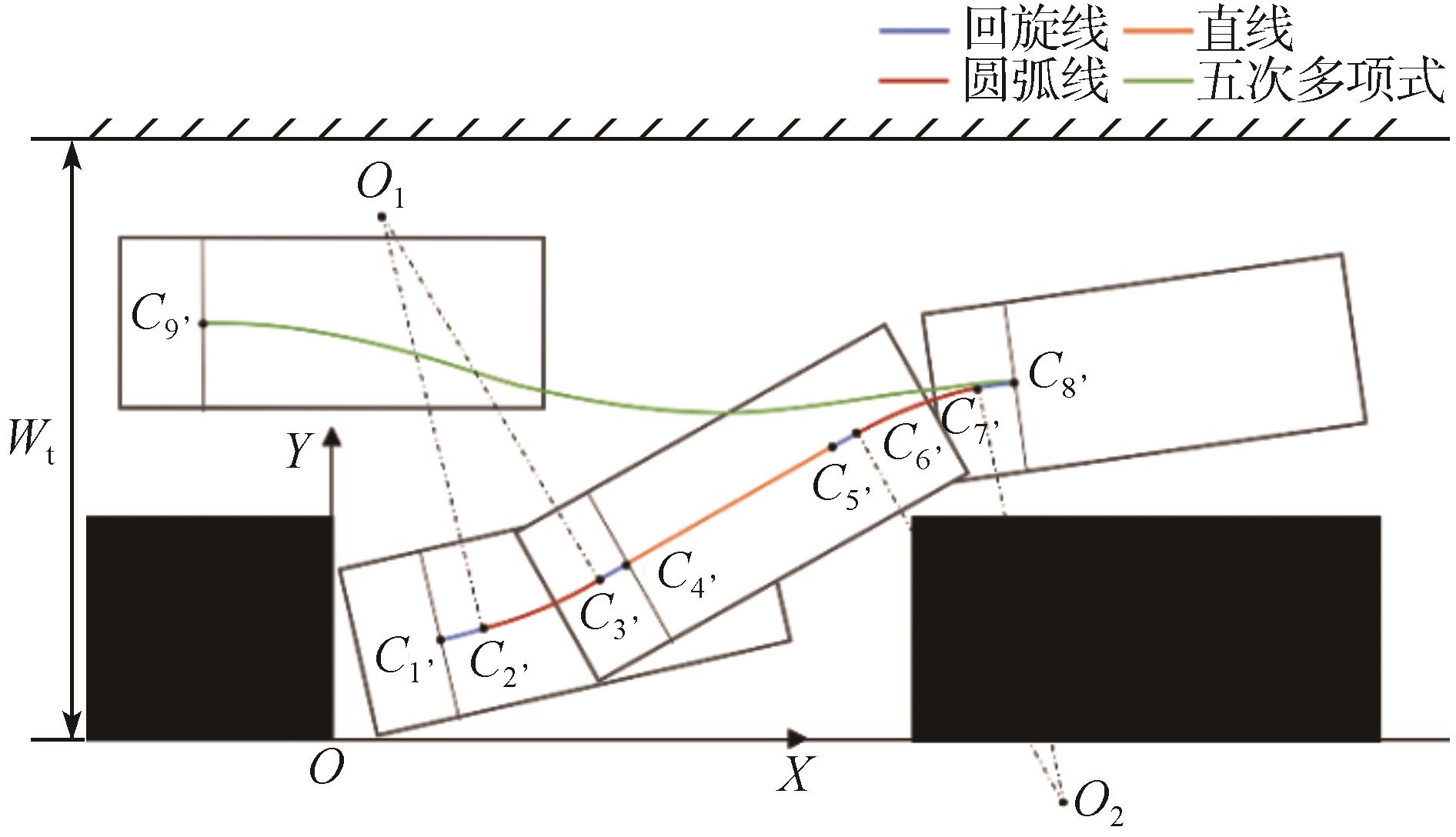
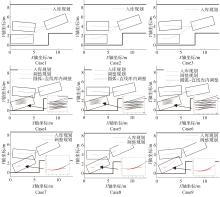
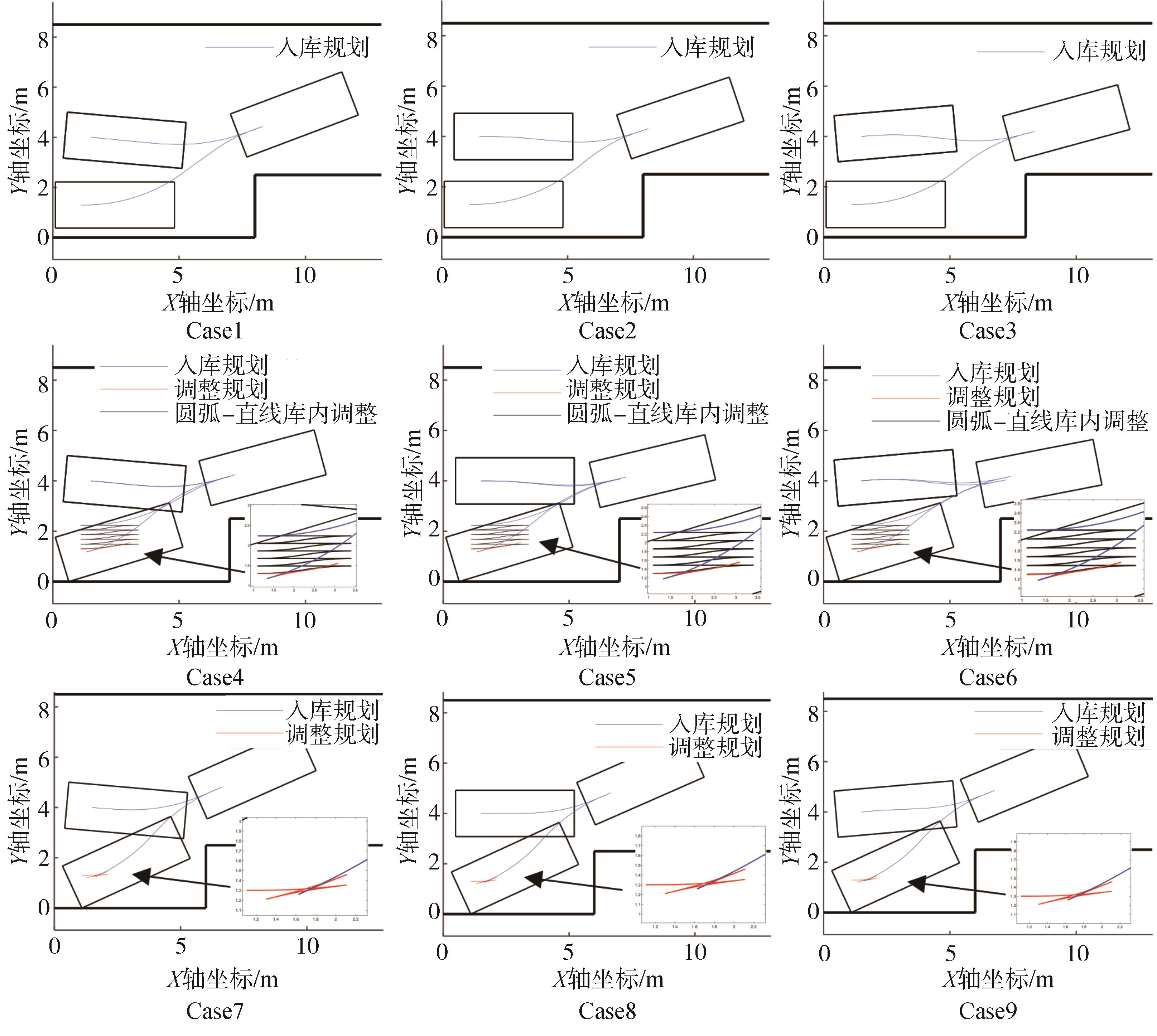
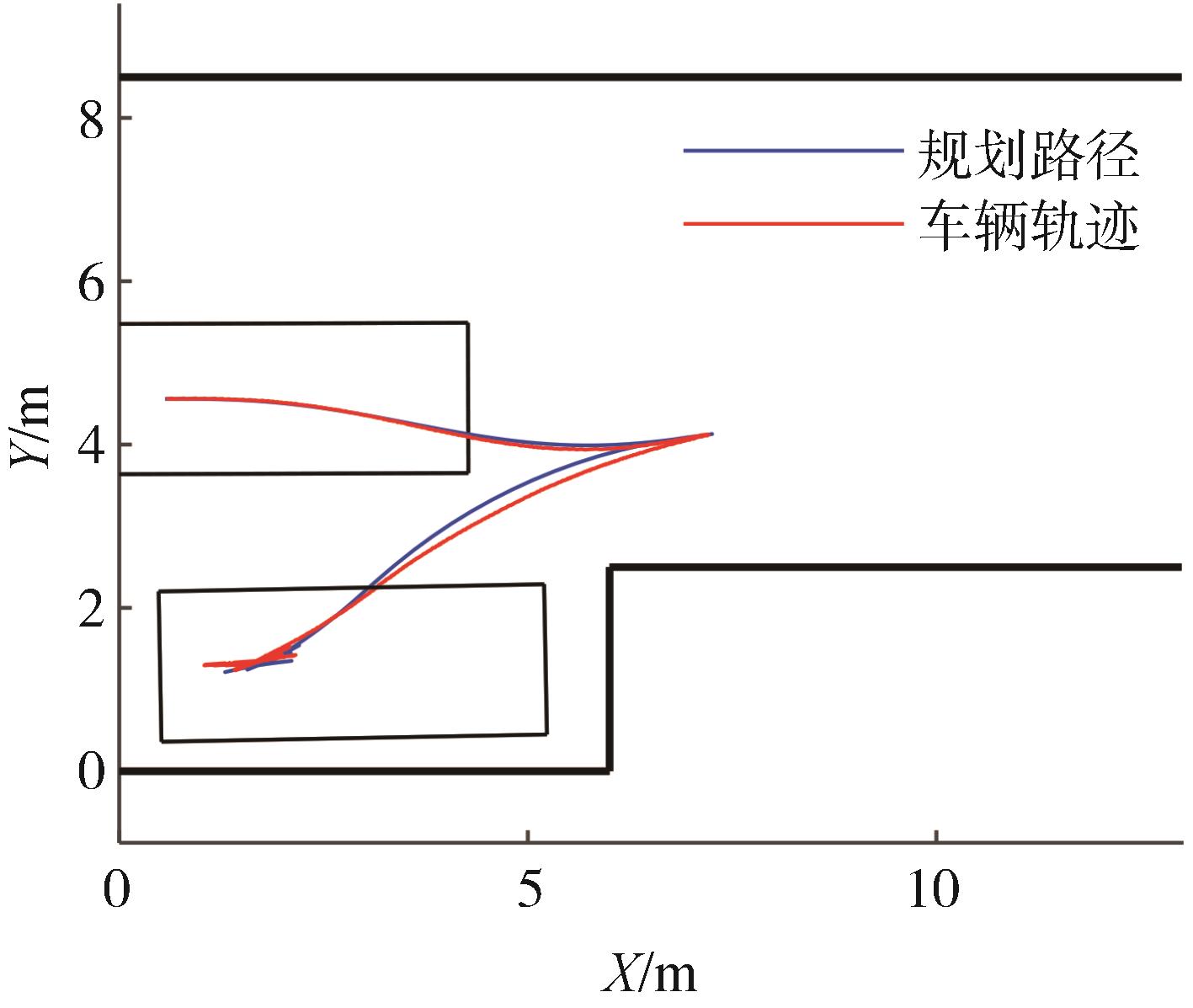
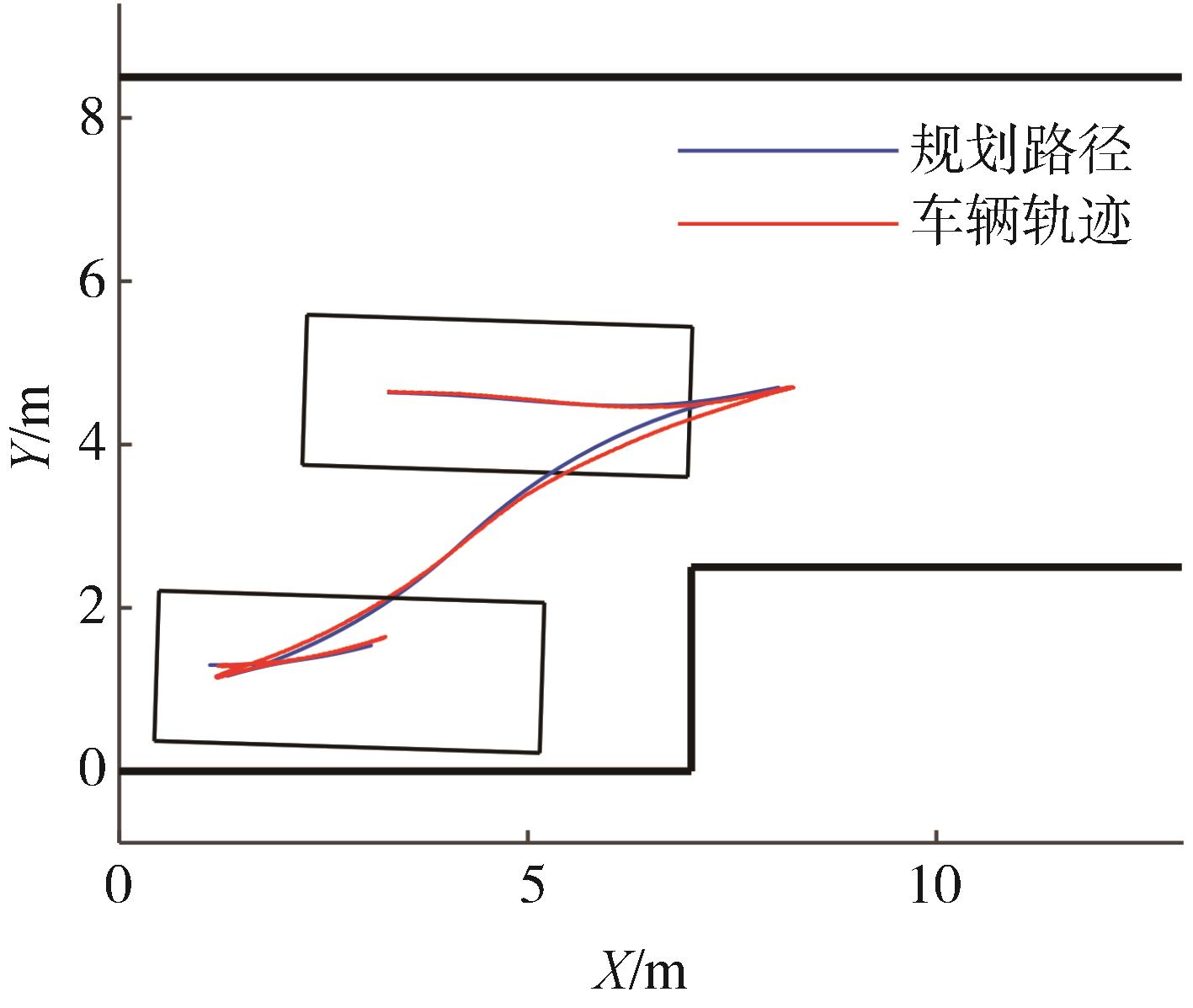
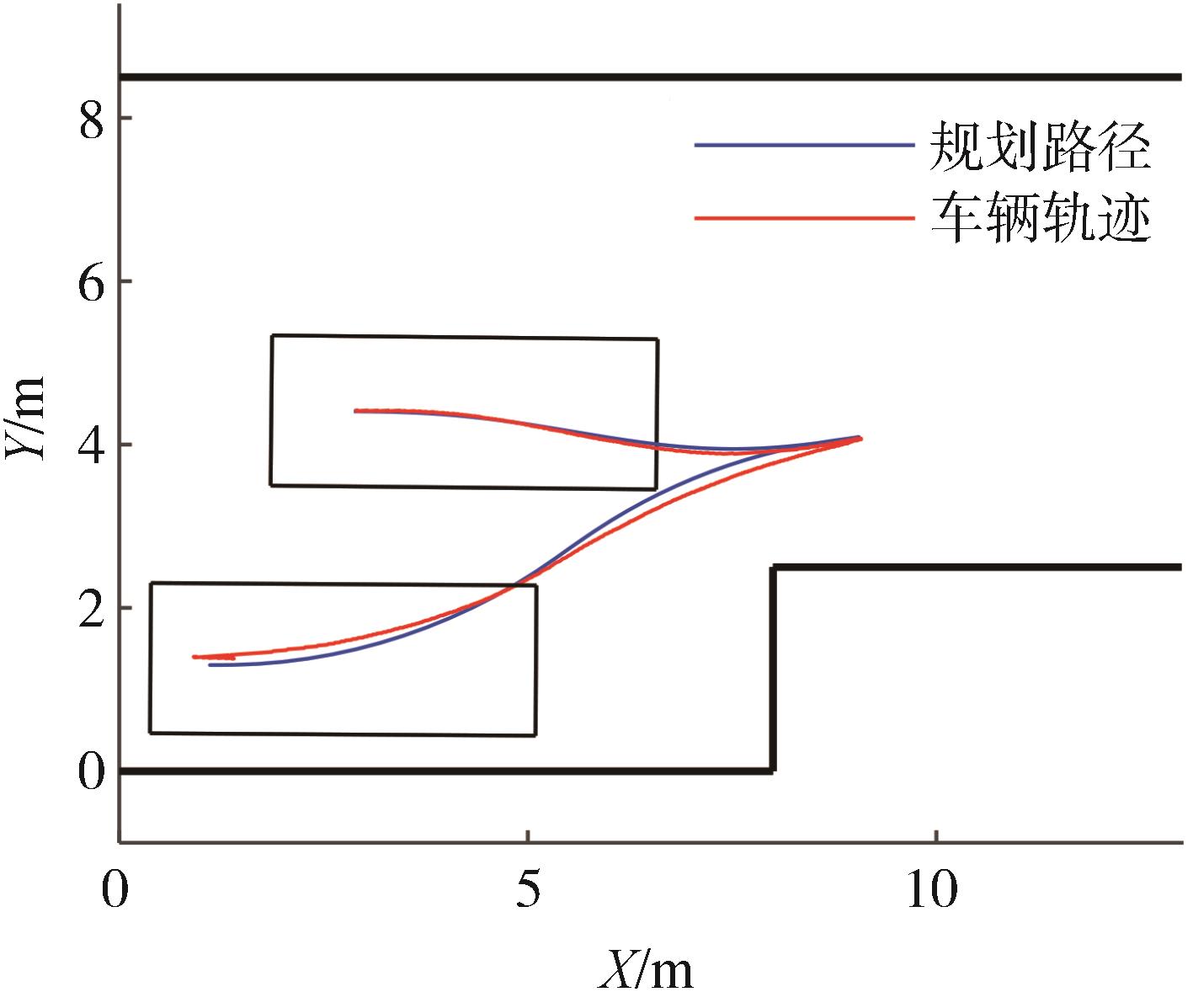
针对狭小车位平行泊车场景,本文中提出了一种基于曲线组合和数值优化的规划方法。首先,将泊车过程逆向化并划分为调整规划和入库规划,通过建立基于回旋-圆弧组合的约束优化模型设计调整规划,引导车辆库内调整位姿寻找出库关键点,建立基于回旋-圆弧-直线组合和五次多项式的约束优化模型设计入库规划,引导车辆寻找最佳泊车点;随后,通过Matlab针对不同工况进行仿真,验证算法的适应性;最后,通过实车试验验证规划路径的有效性。仿真和实车试验的结果表明,本文提出的平行泊车路径规划方法满足狭小泊车空间下的泊车需求,同时具有较强的适应性。