汽车工程 ›› 2021, Vol. 43 ›› Issue (6): 877-884.doi: 10.19562/j.chinasae.qcgc.2021.06.011
李彩霞1,卢少波1,2( ),张博涵1,吴文娟1,陆嘉峰1
),张博涵1,吴文娟1,陆嘉峰1
收稿日期:2020-10-30
修回日期:2021-01-23
出版日期:2021-06-25
发布日期:2021-06-29
通讯作者:
卢少波
E-mail:lsb@cqu.edu.cn
基金资助:
Caixia Li1,Shaobo Lu1,2(),Bohan Zhang1,Wenjuan Wu1,Jiafeng Lu1
Received:2020-10-30
Revised:2021-01-23
Online:2021-06-25
Published:2021-06-29
Contact:
Shaobo Lu
E-mail:lsb@cqu.edu.cn
摘要:
针对行人违规过街导致人车碰撞事故频发的交通安全问题,采用改进人工势场法并考虑行人行为的不确定性,对车辆避撞路径进行动态规划。为表达行人违规过街时的方向不确定性,提出一种基于加权效用函数法的行人过街方向概率模型,并以此为基础预测行人位置。针对动态障碍的转向避撞轨迹规划,以避撞安全距离为基础,提出一种相对位置自适应的变长轴椭圆障碍势能场,可根据动态行人的预测位置实时规划避撞路径。在4种工况下进行了仿真对比分析,结果表明:所提出的路径规划方法可根据行人的预测位置,有效地规划出更平滑的安全避障路径。
李彩霞,卢少波,张博涵,吴文娟,陆嘉峰. 基于行人位置预测的人车转向避撞路径规划[J]. 汽车工程, 2021, 43(6): 877-884.
Caixia Li,Shaobo Lu,Bohan Zhang,Wenjuan Wu,Jiafeng Lu. Human⁃vehicle Steering Collision Avoidance Path Planning Based on Pedestrian Location Prediction[J]. Automotive Engineering, 2021, 43(6): 877-884.
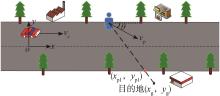
图 1
人车避撞场景"
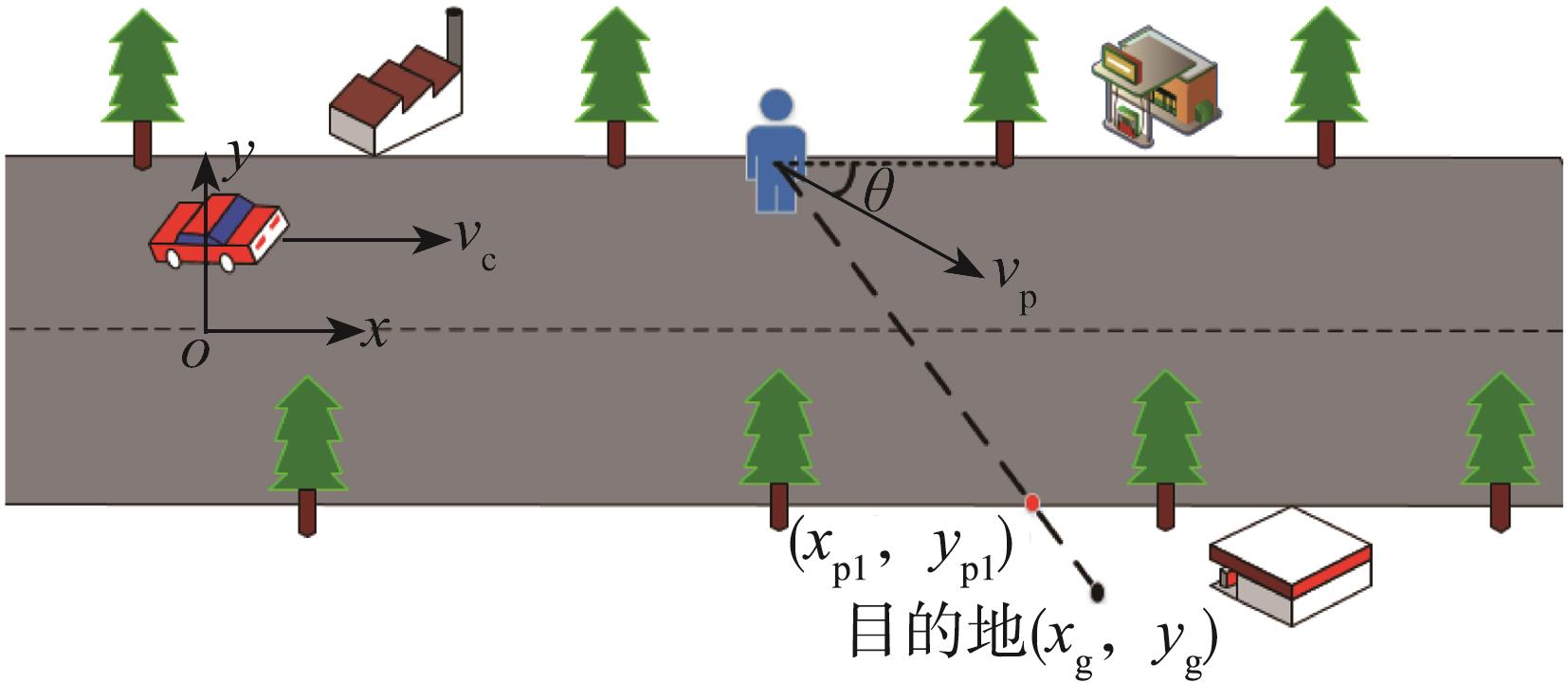
图 2
行人过街方向概率分布"
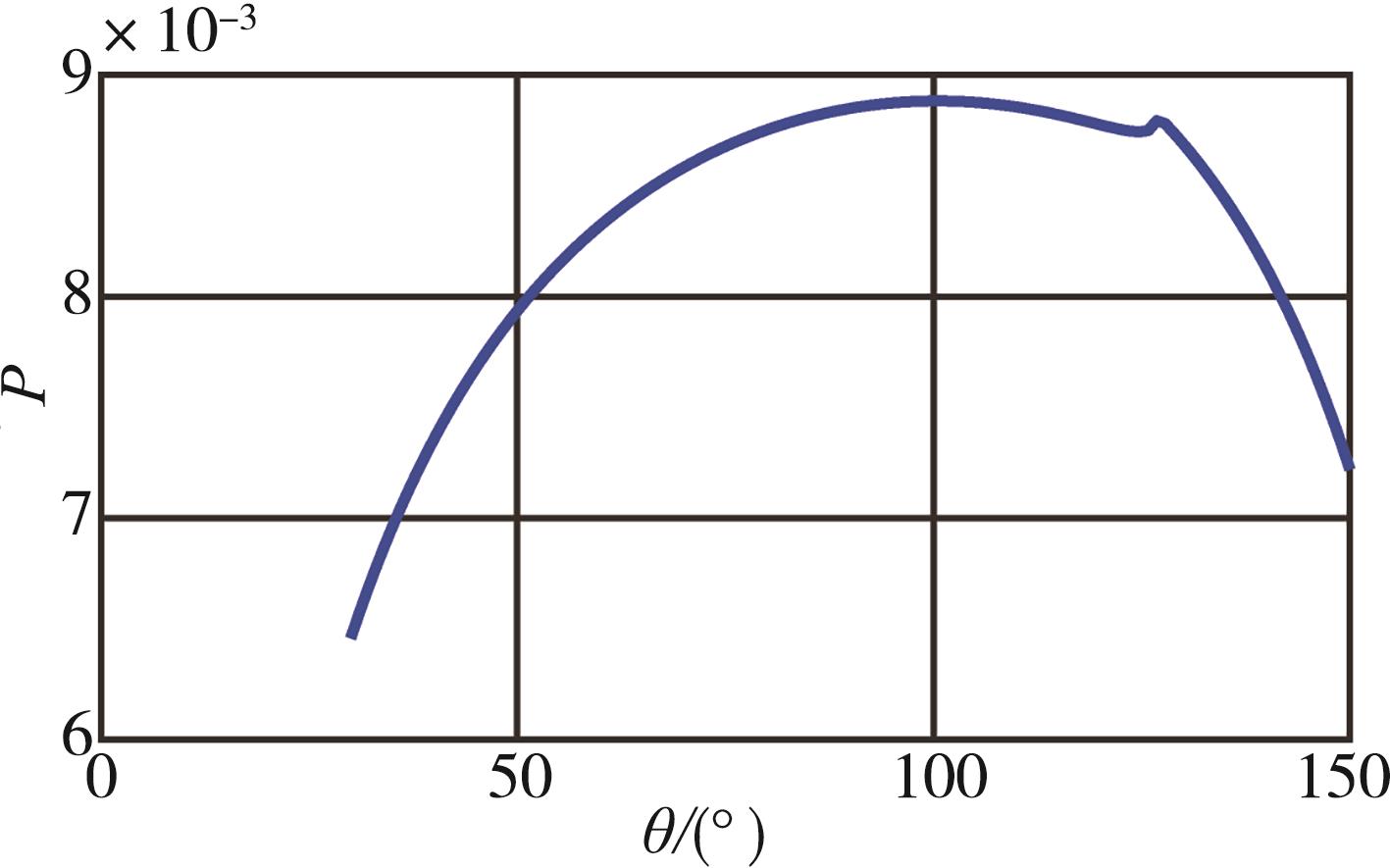
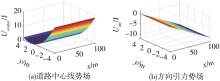
图 3
道路中心线及方向引力势场"


图 4
道路边界及车道线势场"
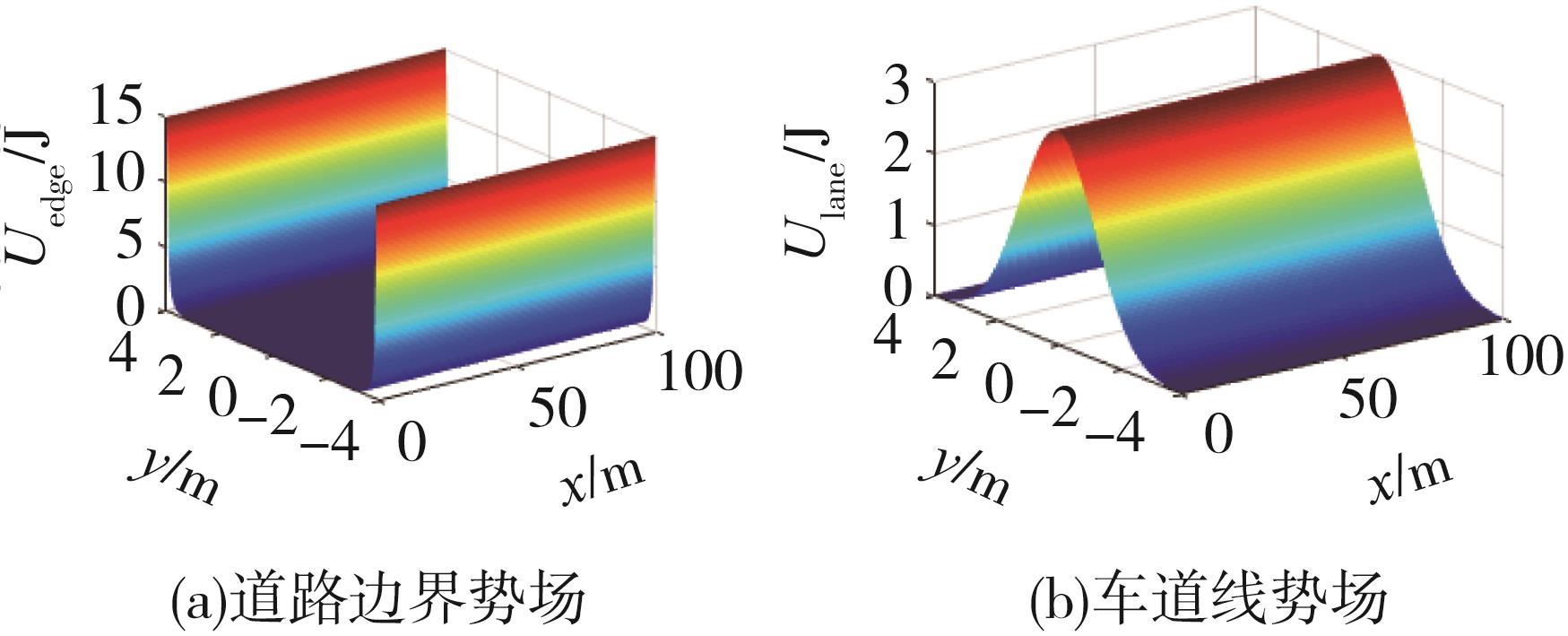
图 5
障碍物椭圆斥力势场"
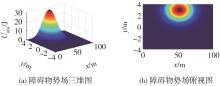
图 6
障碍物斥力势场"
表 1
路径规划主要参数"
| 参数 | 场景1 | 场景2 | 场景3 | 场景4 |
|---|---|---|---|---|
| vp/(m·s-1) | 0 | 1.25 | 1.25 | 1.25 |
| θ/(°) | 静止 | 30 | 90 | 150 |
| vc/(m·s-1) | 25 | 25 | 25 | 25 |
| xp(0)/m | 50 | 50 | 50 | 50 |
| yp(0)/m | 3 | 4 | 3 | 4 |
| Tcp/s | 2 | 2.09 | 2 | 1.92 |
| t=Tcp时,xp(t)/m | 50 | 50.26 | 50 | 47.92 |
| t=Tcp时,yp(t)/m | 3 | 2.69 | 0.5 | 2.8 |
图 7
行人静止时的规划路径"


图 8
θ=30°时的规划路径"

图 9
θ=90°时的规划路径"
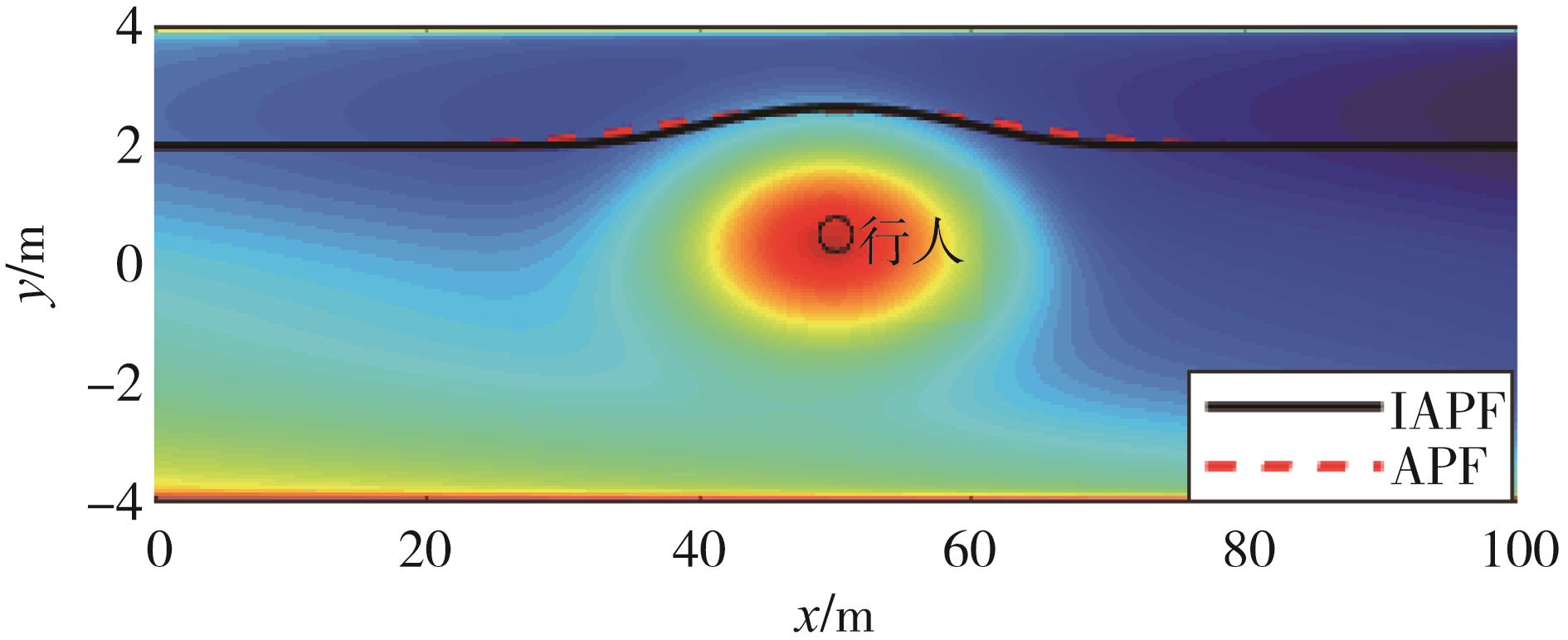
图 10
θ=150°时的规划路径"
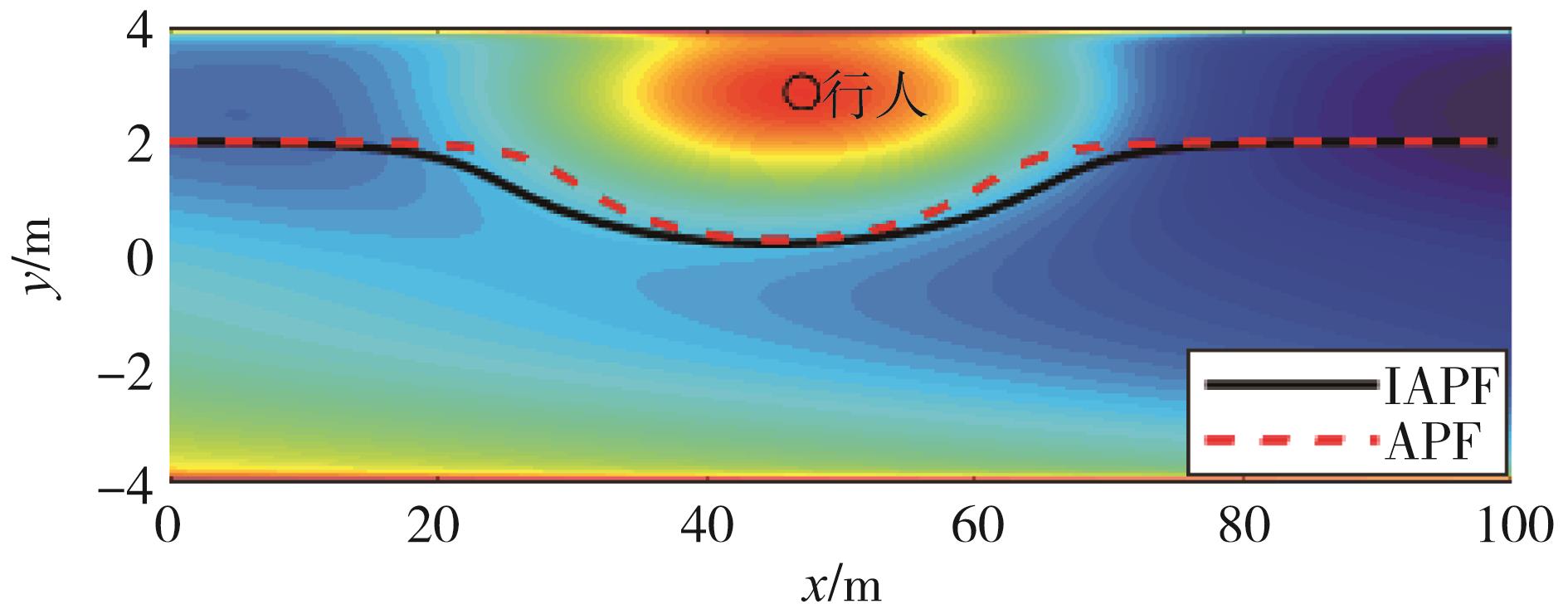
表 2
各场景长半轴数值"
| 项目 | 场景1 | 场景2 | 场景3 | 场景4 |
|---|---|---|---|---|
| 固定长半轴/m | 15 | |||
| 可变长半轴/m | 18.78 | 22.02 | 11.85 | 22.02 |
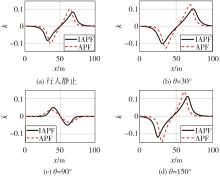
图 11
改进前后避撞路径曲率对比"

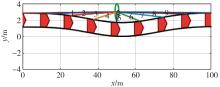
图 12
行人静止时的路径分析"
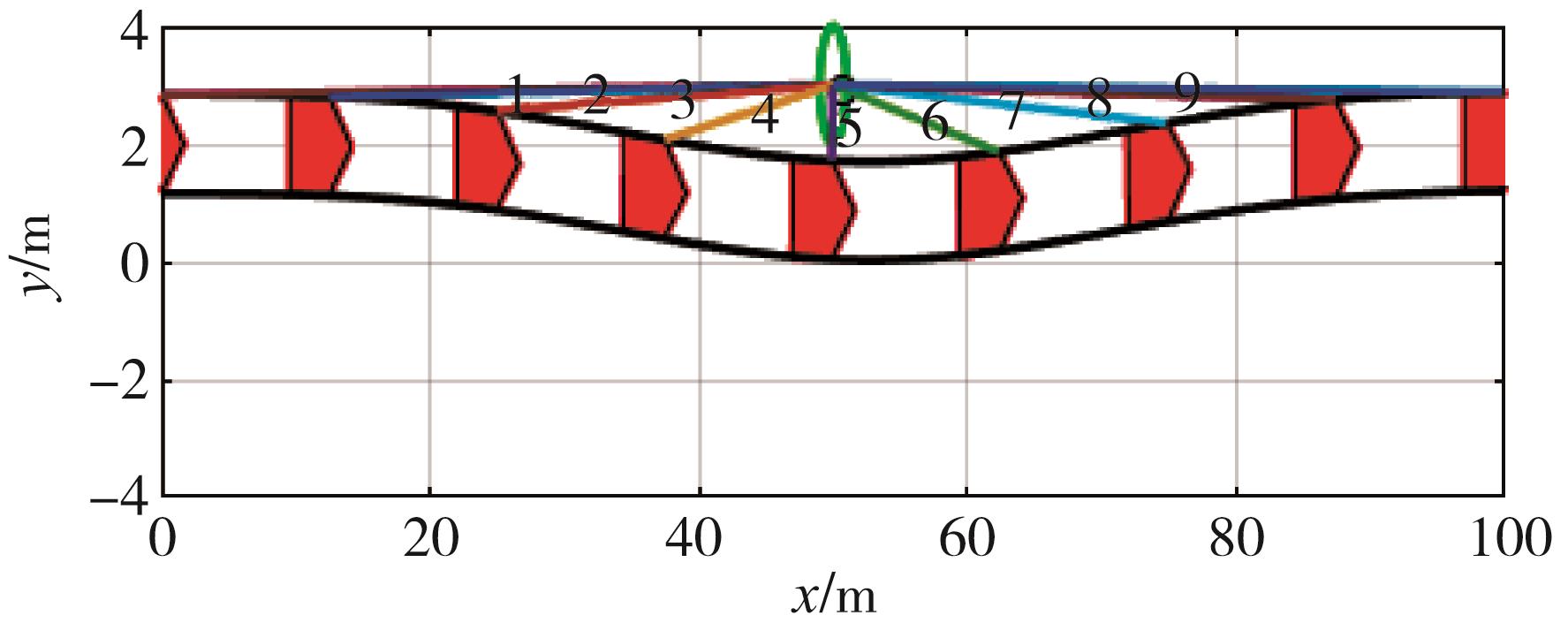
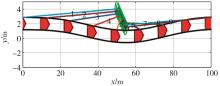
图 13
θ=30°的路径分析"
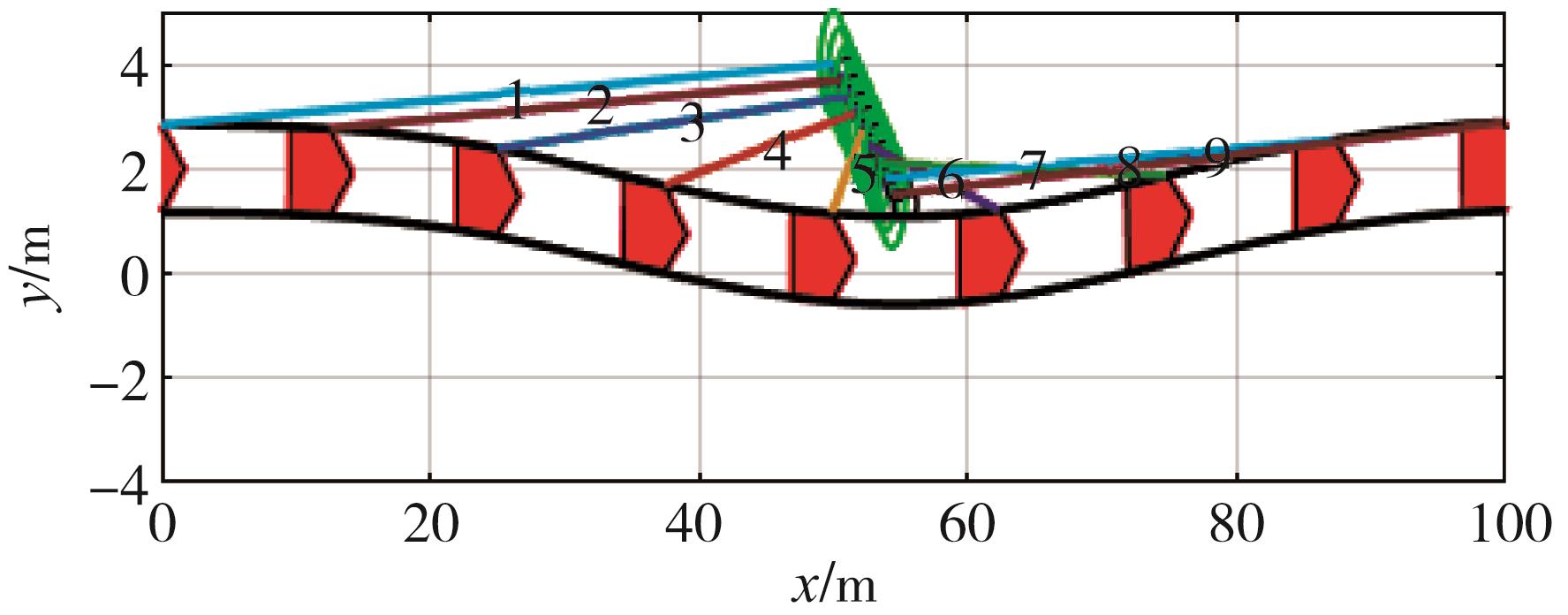
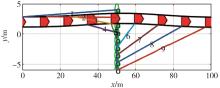
图 14
θ=90°的路径分析"
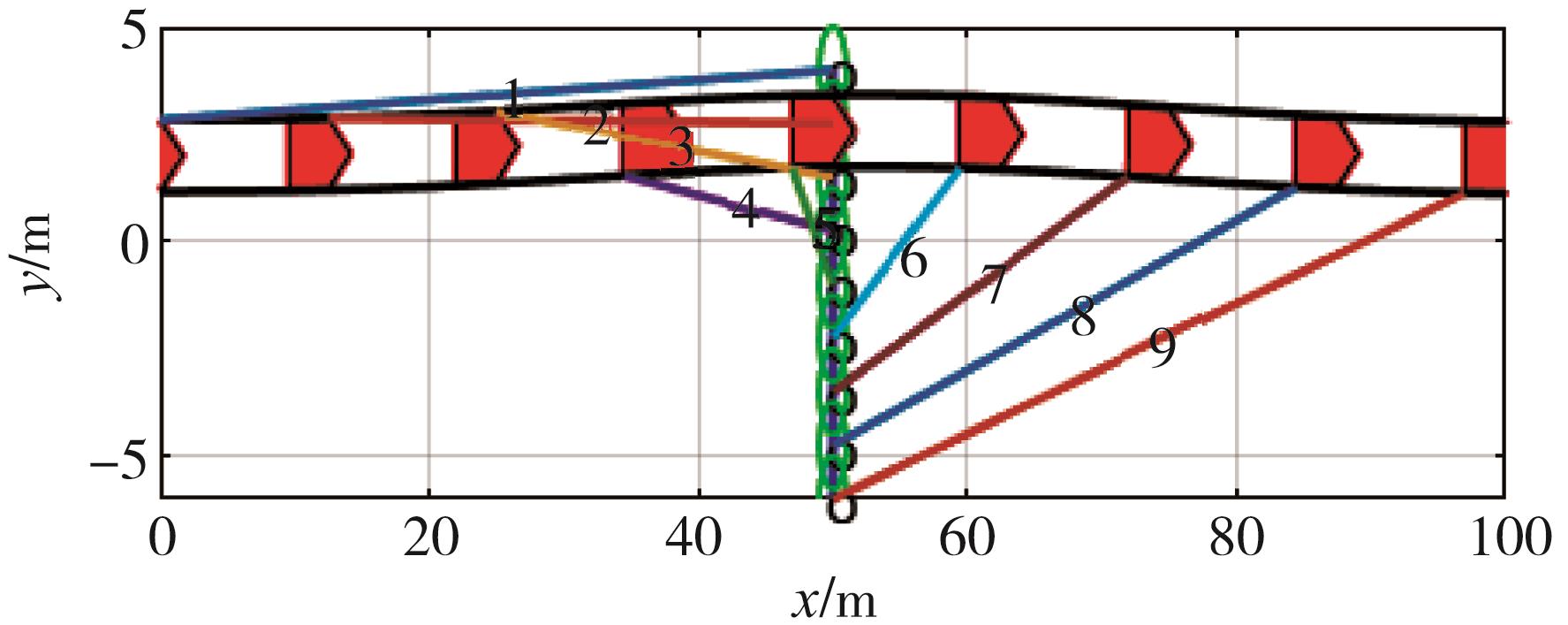
图 15
θ=150°的路径分析"
| 1 | 吴文静, 陈润超, 马芳武, 等. 基于序列比对的行人过街风险识别研究[J]. 交通运输系统工程与信息, 2018, 18(3): 101-107. |
| WU W J, CHEN R C, MA F W, et al. Identify risks of pedestrian crossing based on sequence alignment method[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(3): 101-107. | |
| 2 | 朱西产, 刘智超, 李霖. 基于车辆与行人危险工况的转向避撞控制策略[J]. 汽车安全与节能学报, 2015, 6(3): 217-223. |
| ZHU X C, LIU Z C, LI L. Evasive manoeuvre for emergency steering based on typical vehicle⁃pedestrian use case[J]. Journal of Automotive Safety & Energy, 2015, 6(3): 217-223. | |
| 3 | 彭晓燕, 谢浩, 黄晶. 无人驾驶汽车局部路径规划算法研究[J]. 汽车工程, 2020, 42(1): 1-10. |
| PENG X Y, XIE H, HUANG J. Research on local path planning algorithm for unmanned vehicles[J]. Automotive Engineering, 2020, 42(1): 1-10. | |
| 4 | KHATIB O. Real⁃time obstacle avoidance for manipulators and mobilerobots[J]. International Journal of Robotics Research, 1986, 5(1): 90-98. |
| 5 | 王洪斌, 郝策, 张平, 等. 基于A*算法和人工势场法的移动机器人路径规划[J]. 中国机械工程, 2019, 30(20): 2489-2496. |
| WANG H B, HAO C, ZHANG P, et al. Path planning of mobile robot based on A* algorithm and artificial potential field method[J]. China Mechanical Engineering, 2019, 30(20): 2489-2496. | |
| 6 | 任玥, 郑玲, 张巍, 等. 基于模型预测控制的智能车辆主动避撞控制研究[J]. 汽车工程, 2019, 41(4): 404-410. |
| REN Y, ZHENG L, ZHANG W, et al. A study on active collision avoidance control of autonomous vehicles based on model predictive control[J]. Automotive Engineering, 2019, 41(4): 404-410. | |
| 7 | 徐杨, 陆丽萍, 褚端峰, 等. 无人车辆轨迹规划与跟踪控制的统一建模方法[J]. 自动化学报, 2019, 45(4): 799-807. |
| XU Y, LU L P, CHU D F, et al. Unified modeling of trajectory planning and tracking for unmanned vehicle[J]. ACTA Automatica Sinica, 2019, 45(4): 799-807. | |
| 8 | HU H, ZHANG C, SHENG Y, et al. An improved artificial potential field model considering vehicle velocity for autonomous driving[J]. IFAC Conference Paper, 2018, 51(31): 863-867. |
| 9 | KELLER C, DANG T, FRITZ H, et al. Active pedestrian safety by automatic braking and evasive steering[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1292-1304. |
| 10 | ZHUANG X, WU C. Modeling pedestrian crossing paths at unmarked roadways[J]. IEEE Transactions on Intelligent Transportation Systems, 2013 (3): 1-11. |
| 11 | IRYO-ASANO M, ALHAJYASEEN W. Modeling pedestrian crossing speed profiles considering speed change behavior for the safety assessment of signalized intersections[J]. Accident Analysis and Prevention, 2017, 108: 332-342. |
| 12 | 周竹萍, 蔡逸飞, 胡启洲,等. 基于巢式和交叉巢式logit的行人步行行为模型[J]. 系统工程理论与实践, 2017, 37(1): 219-227. |
| ZHOU Z P, CAI Y F, HU Q Z, et al. A pedestrian walking behavior model based on nested and cross nested logit model[J]. Systems Engineering⁃Theory & Practice, 2017, 37(1): 219-227. | |
| 13 | 蒋晓丹, 范厚明, 张琰雪, 等. 港口与运输方式及陆港联合选择的巢式Logit模型[J]. 交通运输系统工程与信息, 2018, 18(5): 32-37. |
| JIANG X D, FAN H M, ZHANG Y X, et al. Nested logit model for the joint choice of seaport, inland mode and dry port[J]. Journal of Transportation Systems Engineering and Information Technology, 2018, 18(5): 32-37. | |
| 14 | MATSUMI R, RAKSINCHAROENSAK P, NAGAI M. Autonomous braking control system for pedestrian collision avoidance by using potential field[J]. IFAC Proceedings Volumes, 2013, 46(21): 328-334. |
| 15 | 李霖, 朱西产, 陈海林. 驾驶员制动和转向避撞极限[J]. 同济大学学报(自然科学版), 2016, 44(11): 1743-1748. |
| LI L, ZHU X C, CHEN H L. Drivers' collision avoidance limit by braking and steering[J]. Journal of Tongji University(Nature Science Edition), 2016, 44(11): 1743-1748. | |
| 16 | 彭涛, 苏丽俐, 关志伟, 等. 高速公路弯道路段车辆紧急避撞安全换道模型[J]. 汽车工程, 2019, 41(9): 1013-1020. |
| PENG T, SU L L, GUAN Z W, et al. A safe lane⁃change model for vehicle emergent collision avoidance on curved section of highway[J]. Automotive Engineering, 2019, 41(9): 1013-1020. | |
| 17 | ESQUER A, APARICIO A,BAURÈS S, et al. Study of the application of steering support systems to complement autonomous emergency braking systems for collision avoidance strategies[C]. 25th International Technical Conference on the Enhanced Safety of Vehicles (ESV) National Highway Traffic Safety Administration, 2017. |
| 18 | ECKERT A, HARTMANN B, SEVENICH M, et al. Emergency steer & brake assist-a systematic approach for system integration of two complementary driver assistance systems[J]. European Journal of Political Research, 2011, 50(4): 441-478. |
| 19 | 唐志荣, 冀杰, 吴明阳, 等. 基于改进人工势场法的车辆路径规划与跟踪[J]. 西南大学学报(自然科学版), 2018, 40(6): 174-182. |
| TANG Z R, JI J, WU M Y, et al. Vehicle path planning and tracking based on improved artificial potential field method[J]. Journal of Southwest University(Nature Science Edition), 2018, 40(6): 174-182. | |
| 20 | WAHID N, ZAMZURI H, RAHMAN M, et al. Study on potential field based motion planning and control for automated vehicle collision avoidance systems[C]. 2017 IEEE International Conference on Mechatronics (ICM), IEEE, 2017: 208-213. |
| 21 | MICHAEL T, JOEL W. Artificial potential functions for highway driving with collision avoidance[C]. IEEE International Conference on Robotics and Automation, 2008: 3731-3736. |
| [1] | 胡满江,牟斌杰,杨泽宇,边有钢,秦晓辉,徐彪. 基于DBSCAN与二分法的混合A*路径规划方法[J]. 汽车工程, 2023, 45(3): 341-349. |
| [2] | 胡杰,朱琪,陈锐鹏,张敏超,张志豪,刘昊岩. 引入必经点约束的智能汽车全局路径规划[J]. 汽车工程, 2023, 45(3): 350-360. |
| [3] | 任明辉,梁军,陈龙,张春,王云. 基于改进冲突搜索的智能车库多AGV路径规划[J]. 汽车工程, 2023, 45(10): 1933-1943. |
| [4] | 胡杰,朱令磊,陈瑞楠,钟鑫凯,徐文才,张敏超. 狭小车位平行泊车路径规划方法研究[J]. 汽车工程, 2022, 44(7): 1040-1048. |
| [5] | 卢少波,谢菲菲,张博涵,陆嘉峰,李彩霞. 基于非对称势场的人车协同博弈避撞[J]. 汽车工程, 2022, 44(10): 1484-1493. |
| [6] | 高强,陆洲,段晨东,徐婷. 汽车垂直泊车路径规划与路径跟踪研究[J]. 汽车工程, 2021, 43(7): 987-994. |
| [7] | 张志勇,龙凯,杜荣华,黄彩霞. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43(7): 995-1004. |
| [8] | 张旭东,徐福康,邹渊,郭宁远,张宇. 融合TangentBug与Dubins曲线的智能轮式车辆局部路径规划算法[J]. 汽车工程, 2021, 43(6): 833-841. |
| [9] | 胡林,周登辉,黄晶,杜荣华,张新. 考虑信号灯和能耗的电动车最优路径规划[J]. 汽车工程, 2021, 43(5): 641-649. |
| [10] | 张家旭,王晨,赵健. 基于改进人工势场法的汽车弯道超车路径规划与跟踪控制[J]. 汽车工程, 2021, 43(4): 546-552. |
| [11] | 张家旭,王晨,郭崇,滕飞,李东燃. 基于自适应神经模糊推理系统的平行泊车路径规划[J]. 汽车工程, 2021, 43(3): 323-329. |
| [12] | 朱冰, 韩嘉懿, 赵健, 刘帅, 邓伟文. 基于安全场改进RRT*算法的智能汽车路径规划方法*[J]. 汽车工程, 2020, 42(9): 1145-1150. |
| [13] | 熊莹, 毛雪松. 无人驾驶车通过高速公路闸口区的方法研究[J]. 汽车工程, 2020, 42(9): 1263-1269. |
| [14] | 裴晓飞, 李朋, 陈祯福, 过学迅. 不同紧急工况下的汽车主动避撞控制的研究*[J]. 汽车工程, 2020, 42(12): 1647-1654. |
| [15] | 彭晓燕, 谢浩, 黄晶. 无人驾驶汽车局部路径规划算法研究*[J]. 汽车工程, 2020, 42(1): 1-10. |
|