汽车工程 ›› 2021, Vol. 43 ›› Issue (4): 546-552.doi: 10.19562/j.chinasae.qcgc.2021.04.012
张家旭1,2,王晨1,赵健1( )
)
Jiaxu Zhang1,2,Chen Wang1,Jian Zhao1()
摘要:
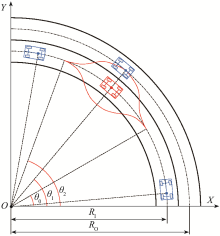
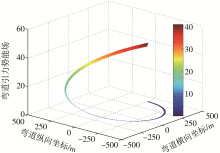
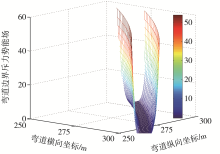
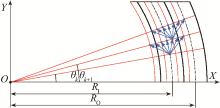
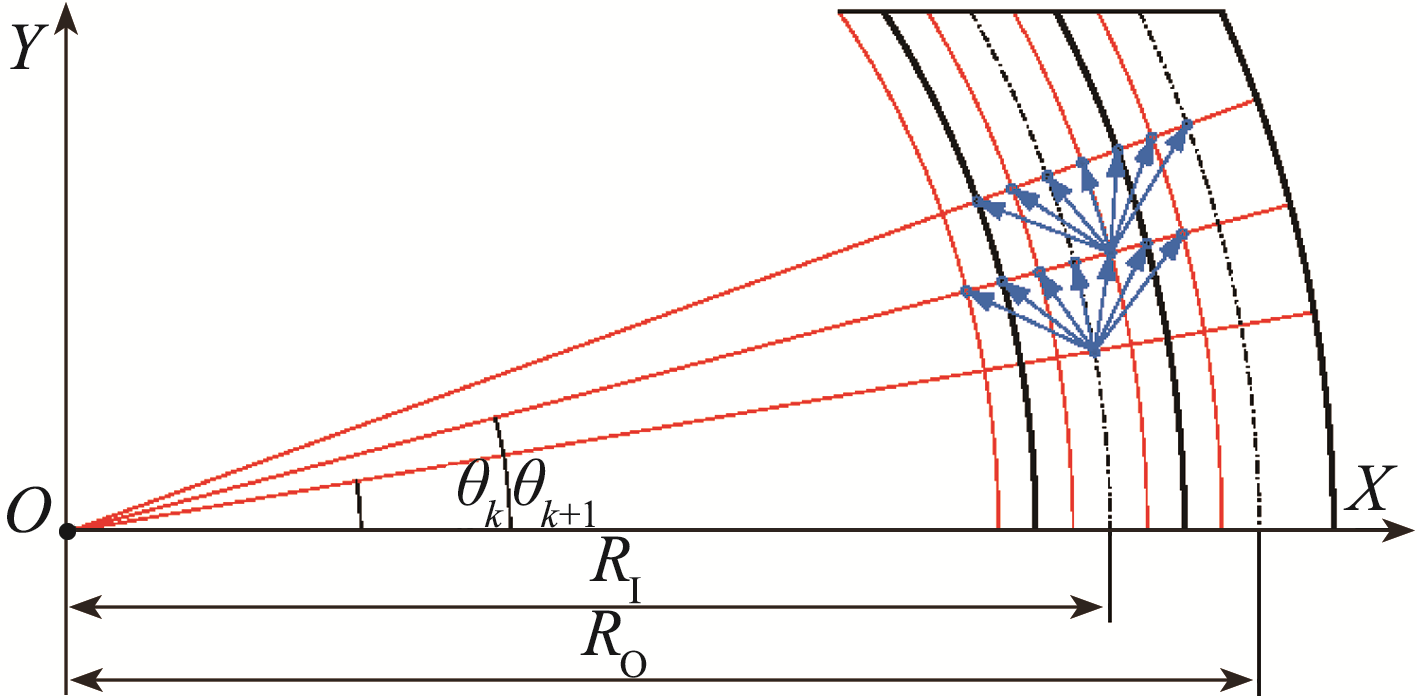
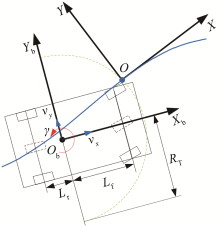
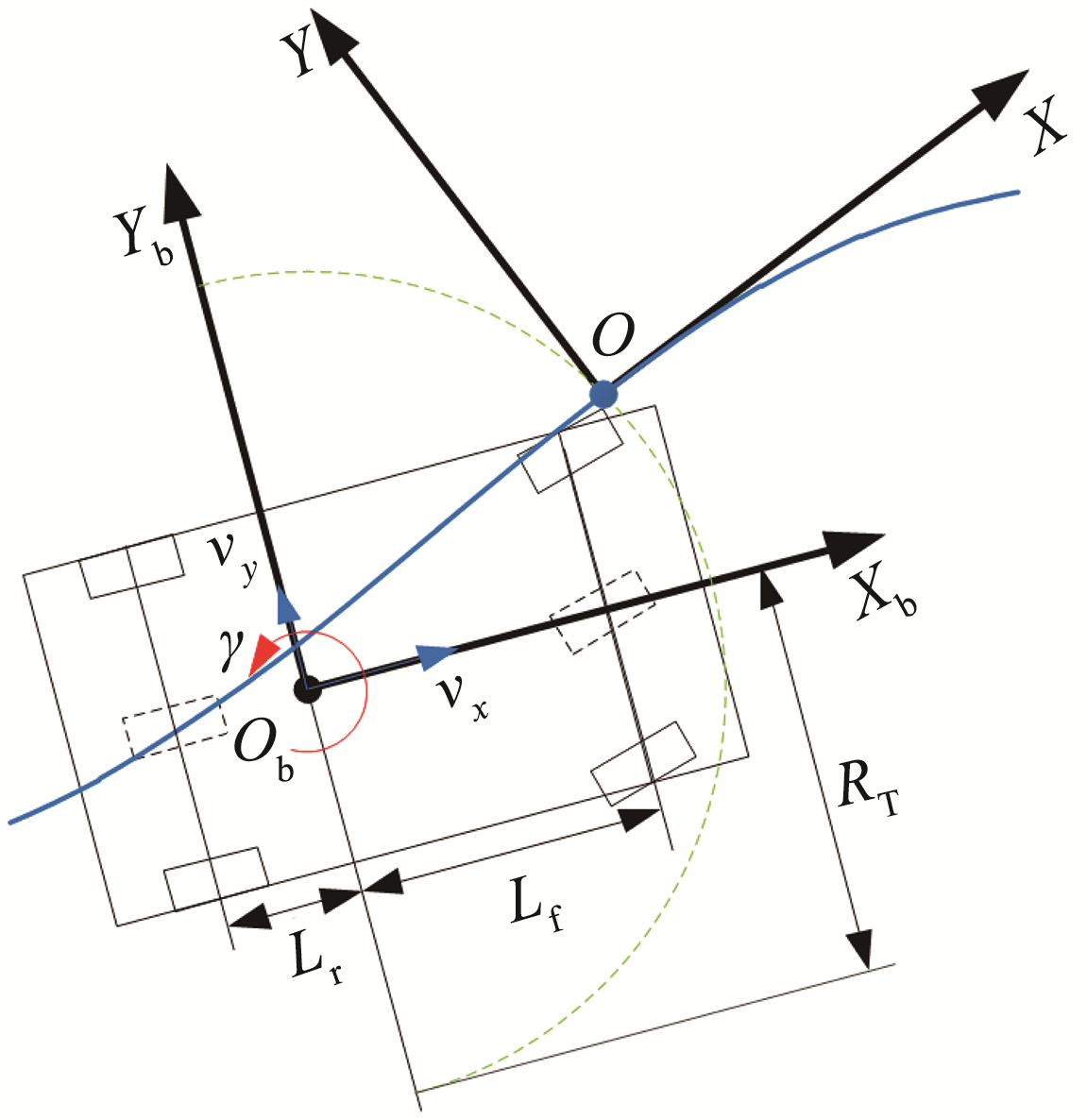
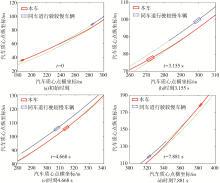
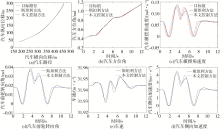
本文中针对无人驾驶汽车弯道超车工况,提出一种基于改进人工势场法的汽车弯道超车路径规划算法,以及一种基于线性鲁棒控制理论的汽车弯道超车路径跟踪最优保性能控制策略。首先,分别基于螺旋下降函数、斜坡正弦函数和指数函数构建弯道引力势能场、同车道行驶较慢车辆斥力势能场和弯道边界斥力势能场,三者构成汽车弯道超车路径的搜索空间。随后,设计一种可应用于动态环境的增量搜索算法,逐步搜索汽车弯道超车路径搜索空间的最快下降方向,进而规划出汽车弯道超车路径。为执行规划出的汽车弯道超车路径,以线性2自由度汽车动力学模型为基础建立包含参数摄动的汽车弯道超车路径跟踪误差动态模型,并基于线性鲁棒控制法设计汽车弯道超车路径跟踪最优保性能控制策略。最后,仿真验证所提出的汽车弯道超车路径规划算法和路径跟踪最优保性能控制策略的可行性和有效性,结果表明:所提出的路径规划算法和跟踪控制策略可安全、舒适地引导汽车完成弯道超车工况。