汽车工程 ›› 2021, Vol. 43 ›› Issue (4): 580-587.doi: 10.19562/j.chinasae.qcgc.2021.04.016
任玥1,冀杰1,赵颖1,梁艺潇2,郑玲2( )
)
Yue Ren1,Jie Ji1,Ying Zhao1,Yixiao Liang2,Ling Zheng2()
摘要:
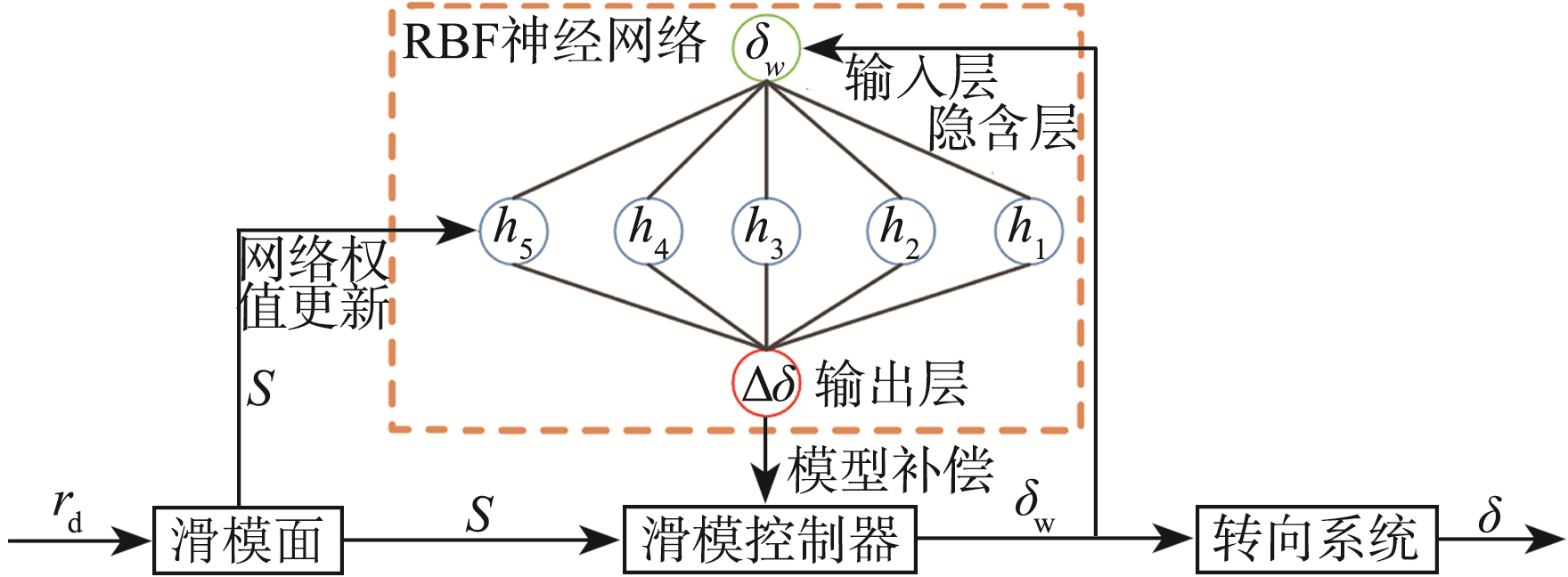
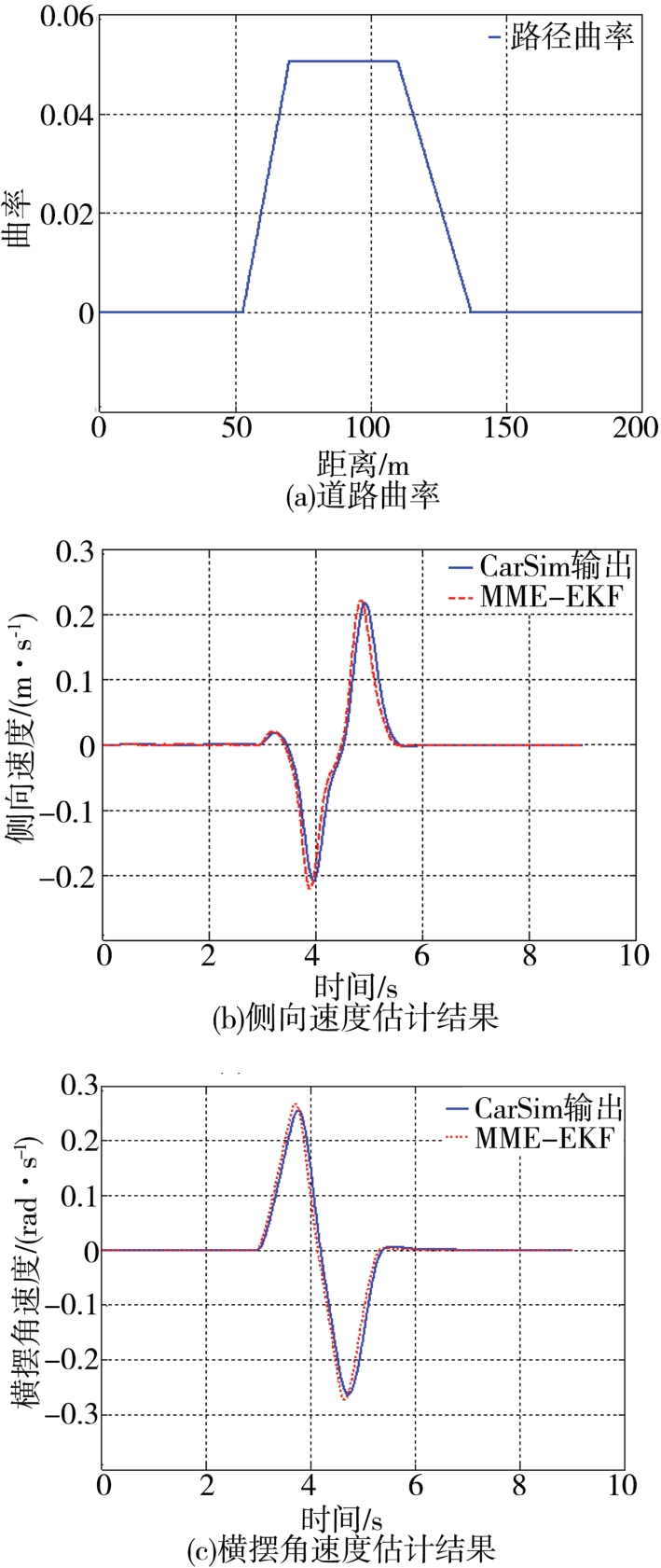
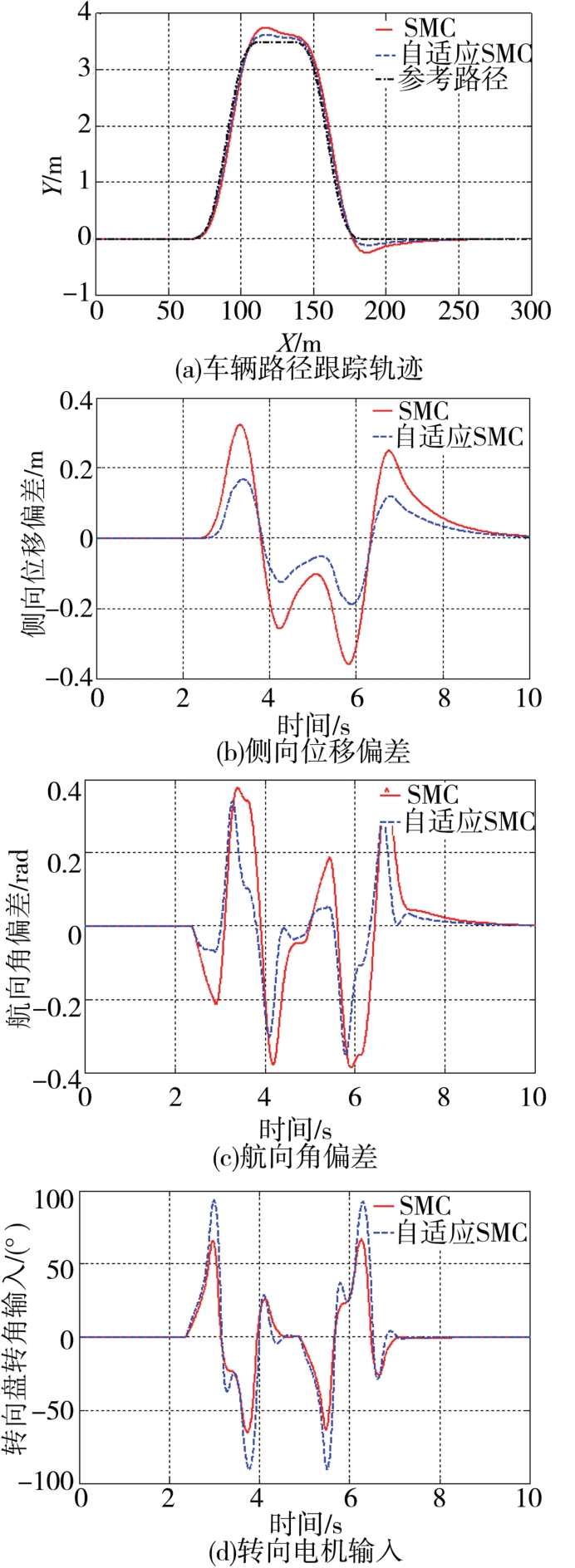
为提高分布式驱动电动智能汽车在自主循迹过程中关键参数的估计精度并降低模型不确定性对控制系统鲁棒性的影响,本文中提出了一种基于观测器的自适应滑模路径跟踪控制策略。首先,针对难以直接精确测量的车辆纵、侧向速度,建立了5输入3输出3状态的状态估计系统,并采用最小模型误差准则以降低估计过程轮胎的非线性特性带来的观测模型误差。接着,基于运动学模型,计算出了路径跟踪期望横摆角速度响应,并采用自适应滑模算法实现主动转向控制。考虑线控转向系统的潜在失效风险,引入径向基神经网络对系统不确定性进行在线估计。同时,设计了直接横摆稳定控制器并采用最优转矩分配策略,进一步提高车辆的稳定性。最后,对车辆状态估计和路径跟踪进行了Carsim/Matlab联合仿真,结果表明:基于最小模型误差准则的观测器能取得较可靠的估计结果,路径跟踪控制器能保证车辆具有较好的跟踪精度和鲁棒性。