汽车工程 ›› 2023, Vol. 45 ›› Issue (7): 1123-1133.doi: 10.19562/j.chinasae.qcgc.2023.07.003
所属专题: 智能网联汽车技术专题-规划&决策2023年
胡杰1,2,3( ),张志豪1,2,3,陈瑞楠1,2,3,陈锐鹏1,2,3,刘昊岩1,2,3,朱琪1,2,3,陈晖4
),张志豪1,2,3,陈瑞楠1,2,3,陈锐鹏1,2,3,刘昊岩1,2,3,朱琪1,2,3,陈晖4
Jie Hu1,2,3(),Zhihao Zhang1,2,3,Ruinan Chen1,2,3,Ruipeng Chen1,2,3,Haoyan Liu1,2,3,Qi Zhu1,2,3,Hui Chen4
摘要:
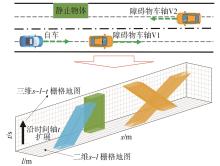
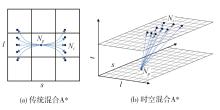
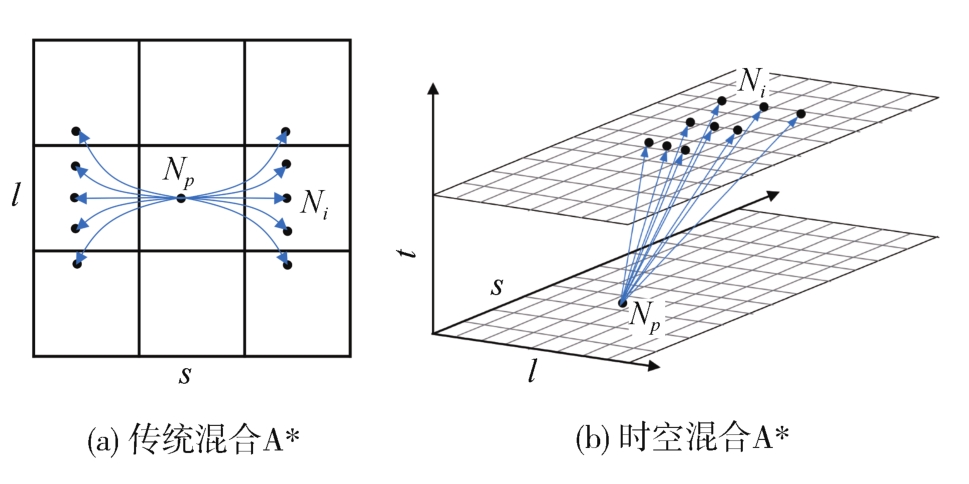
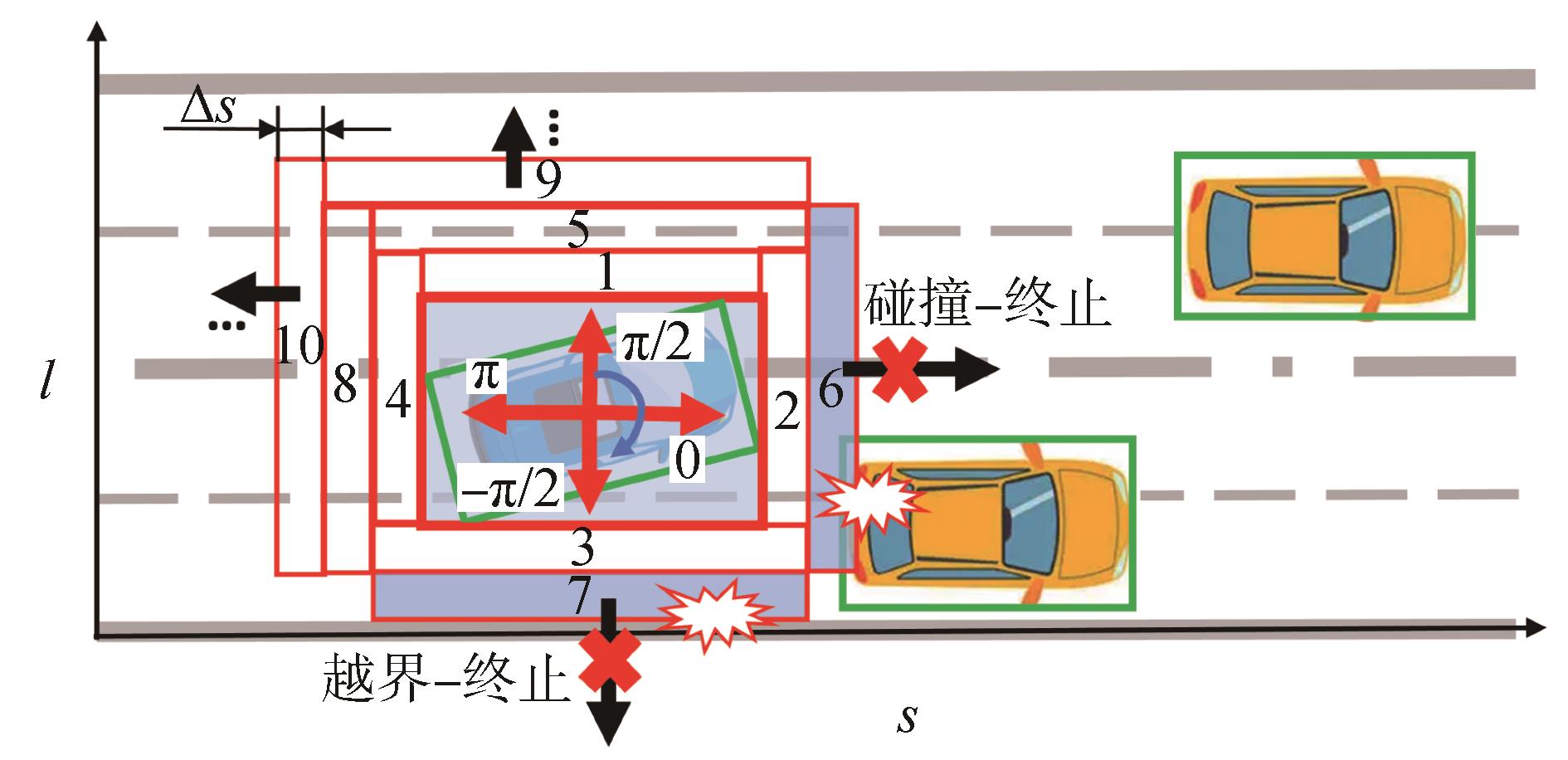
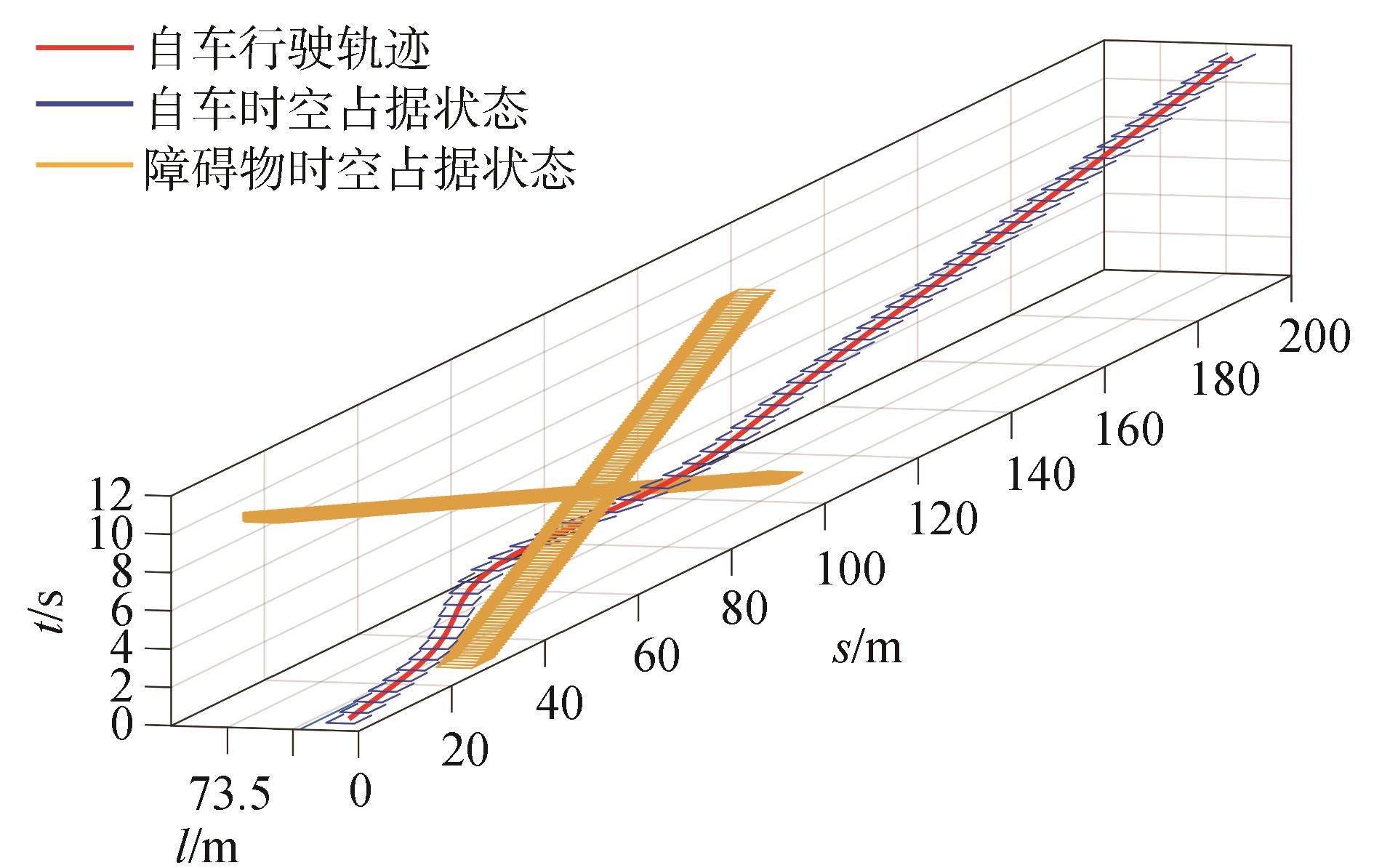
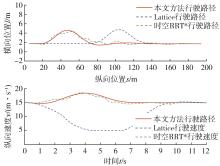
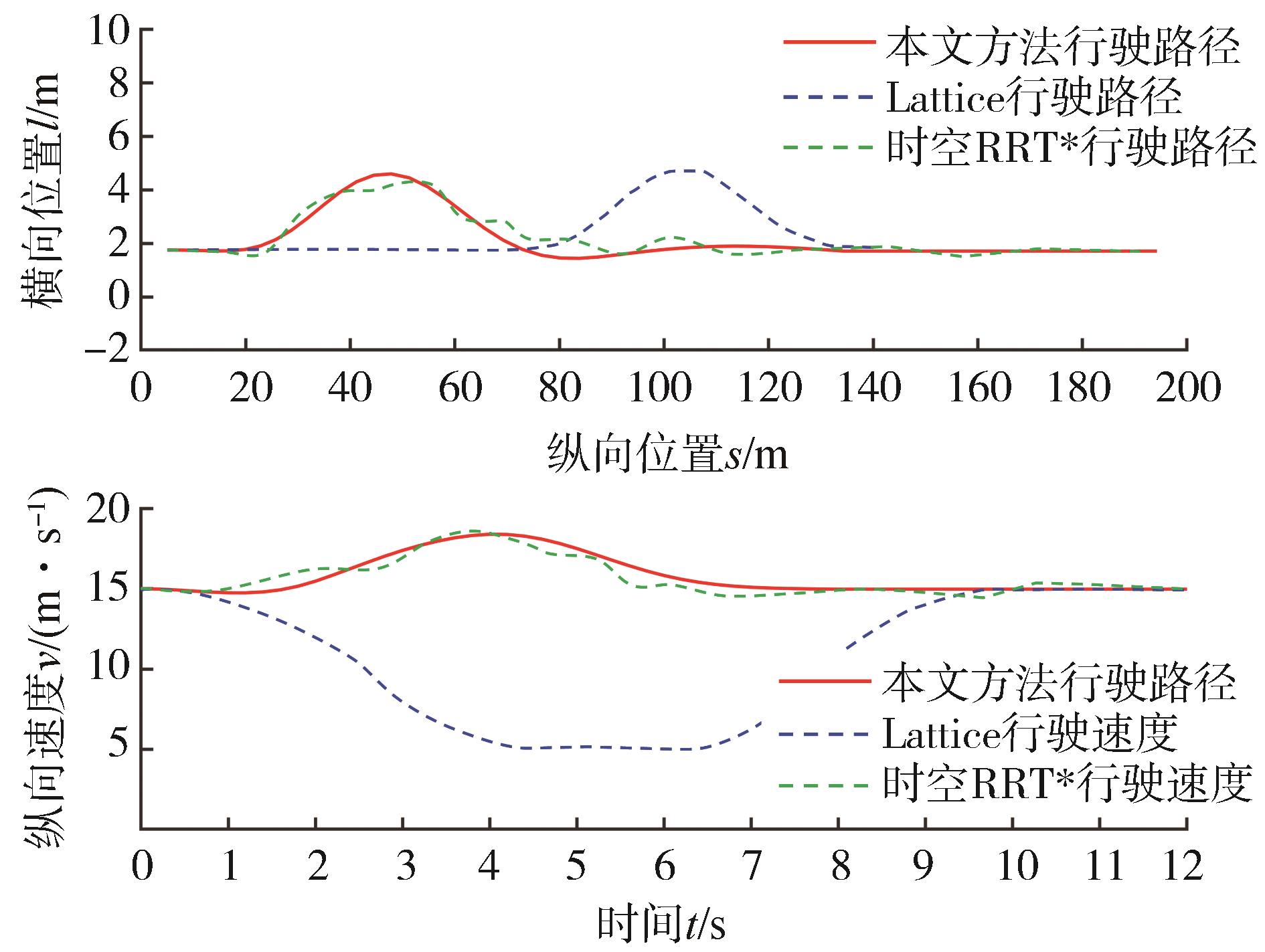
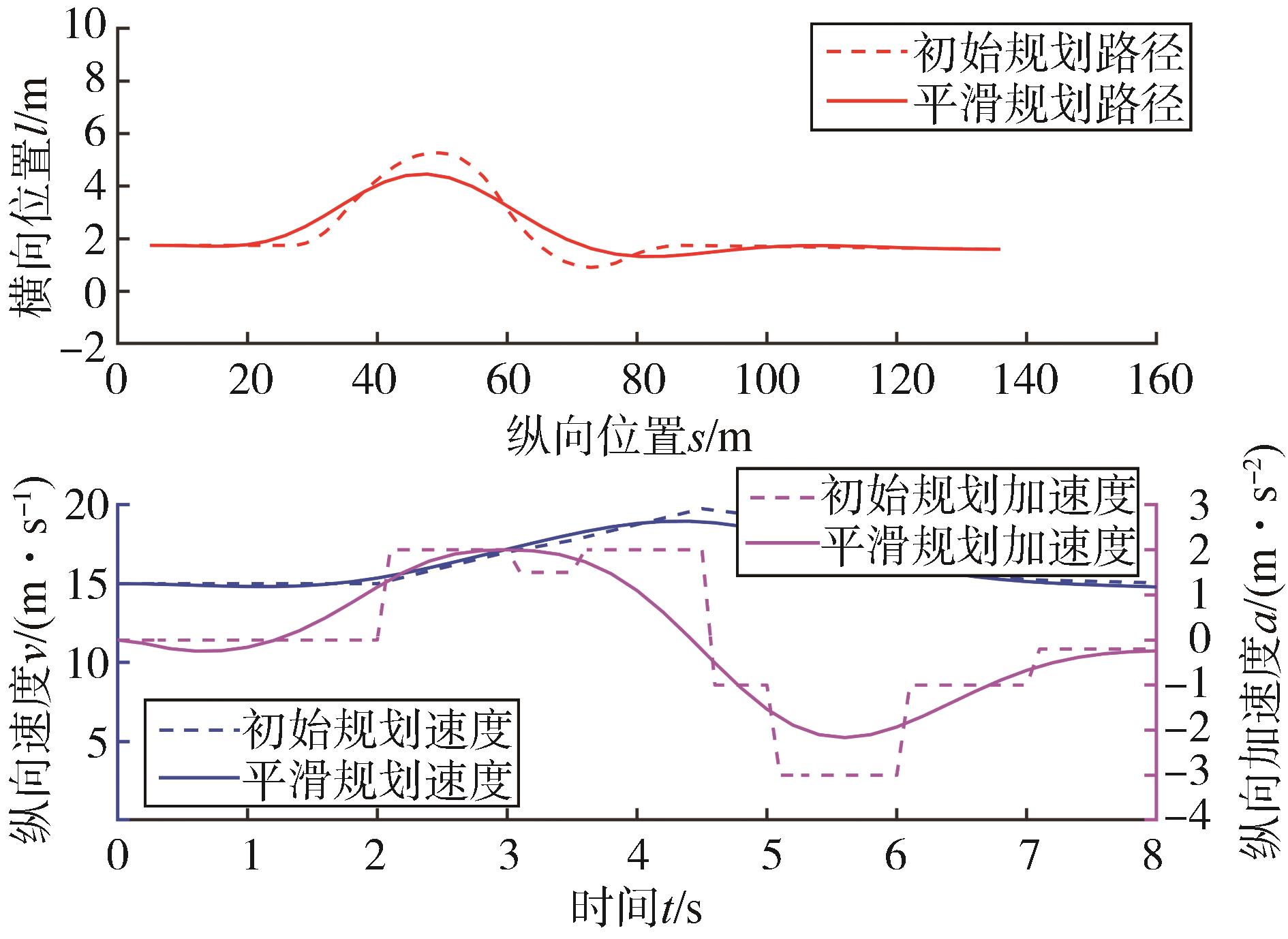
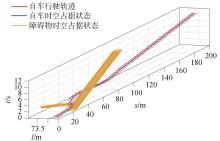
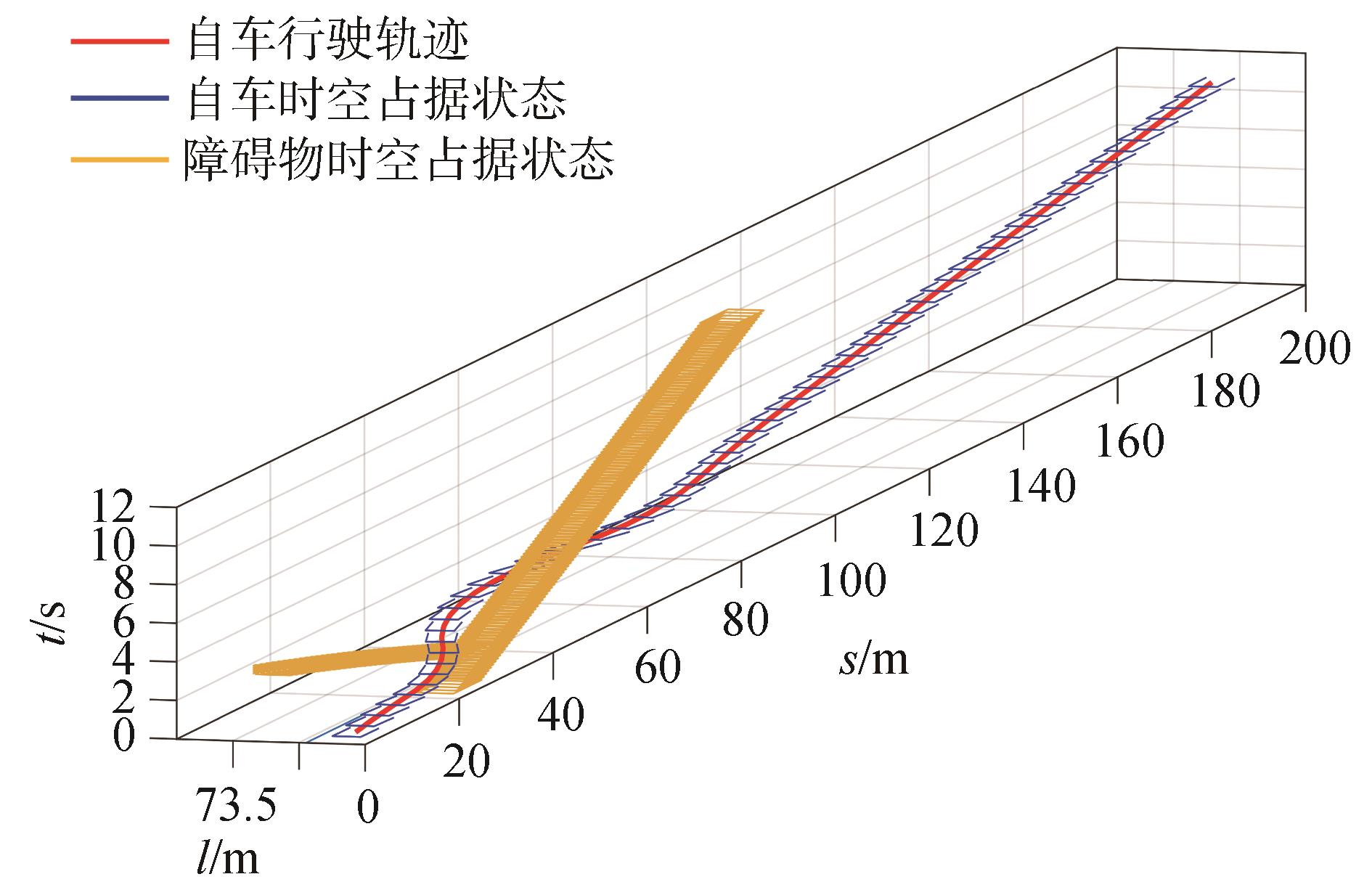
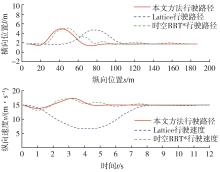
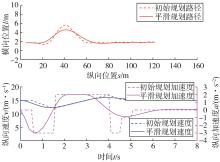
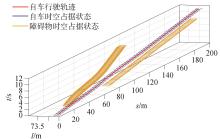
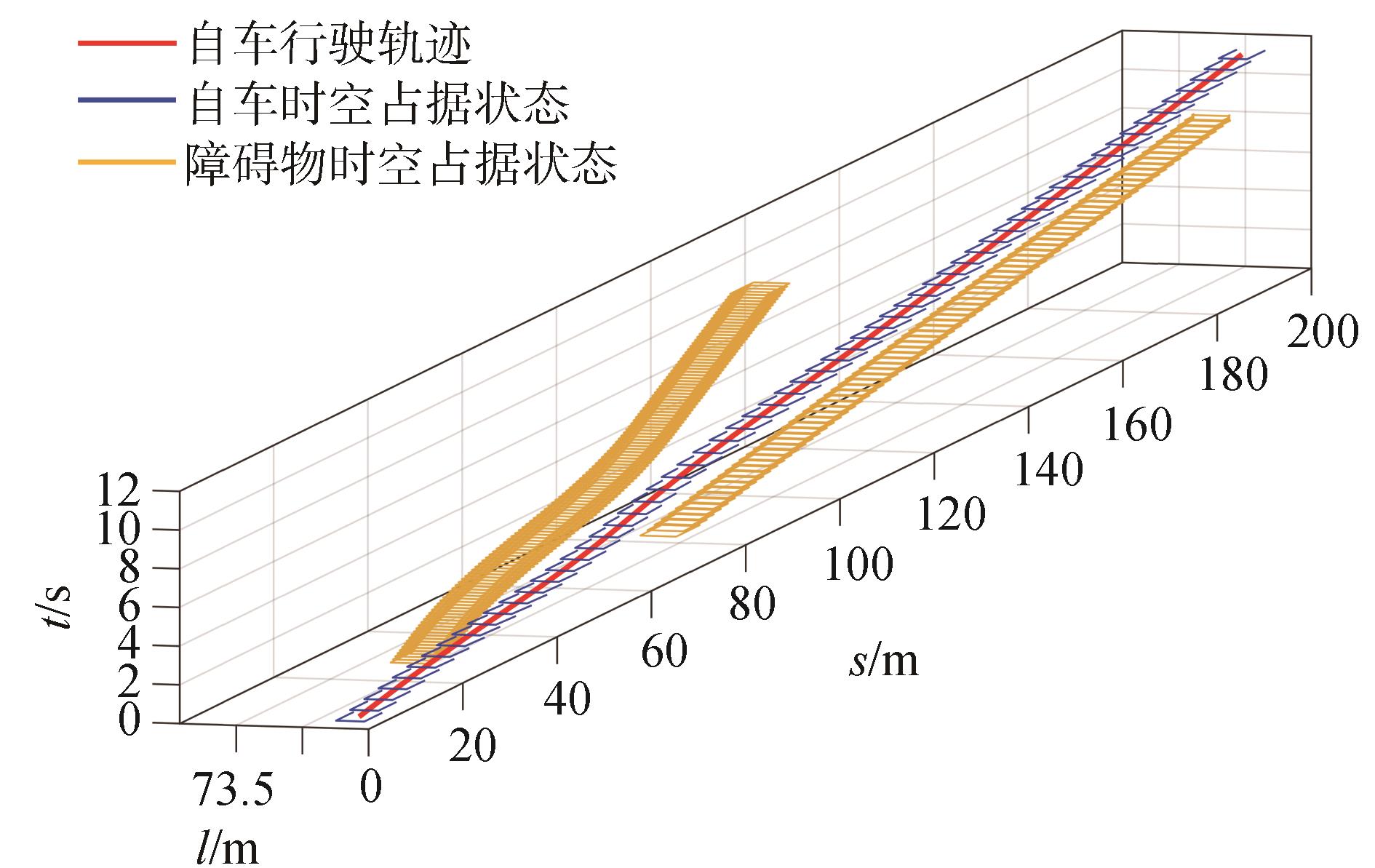
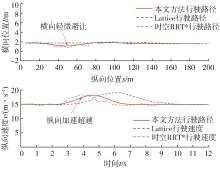
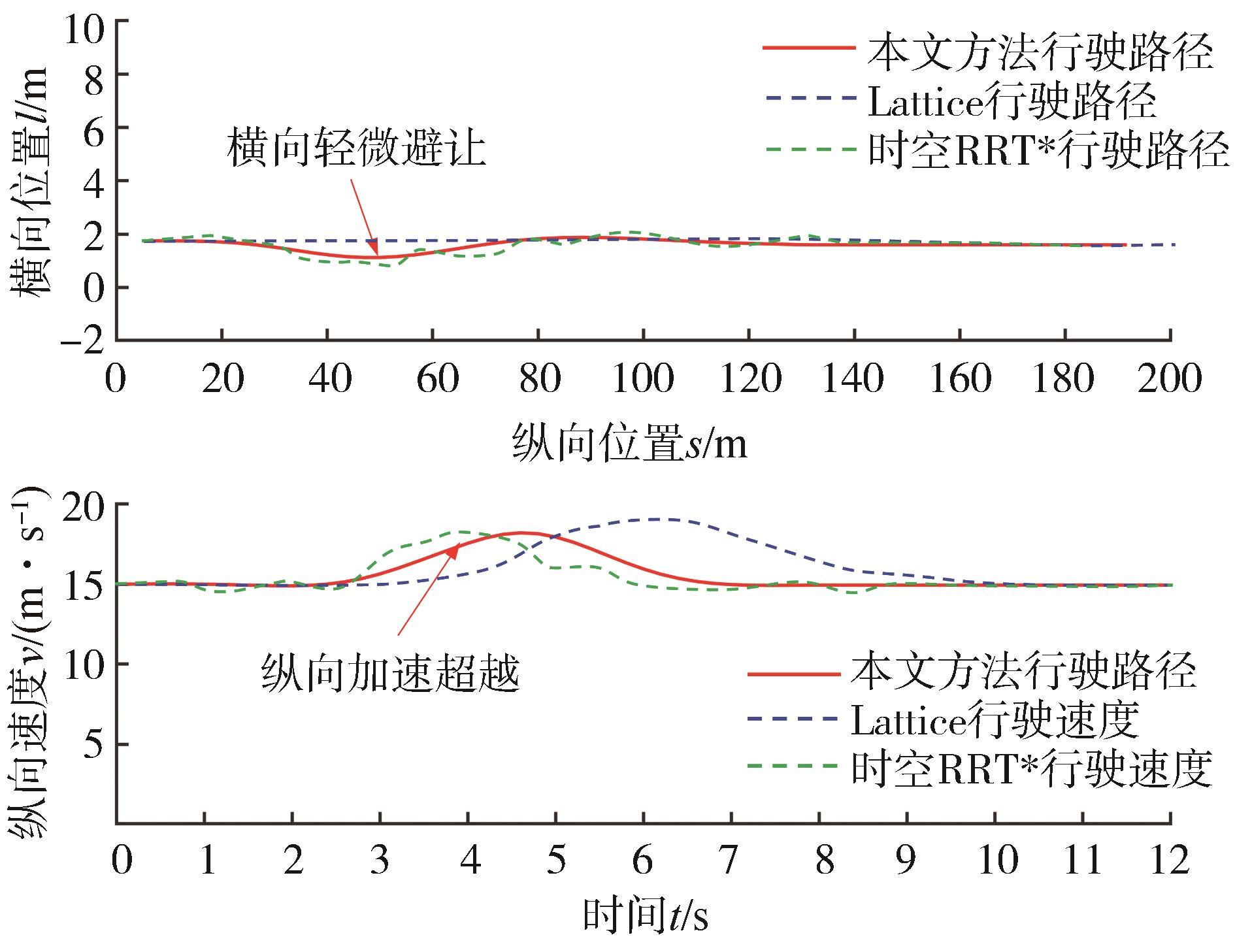
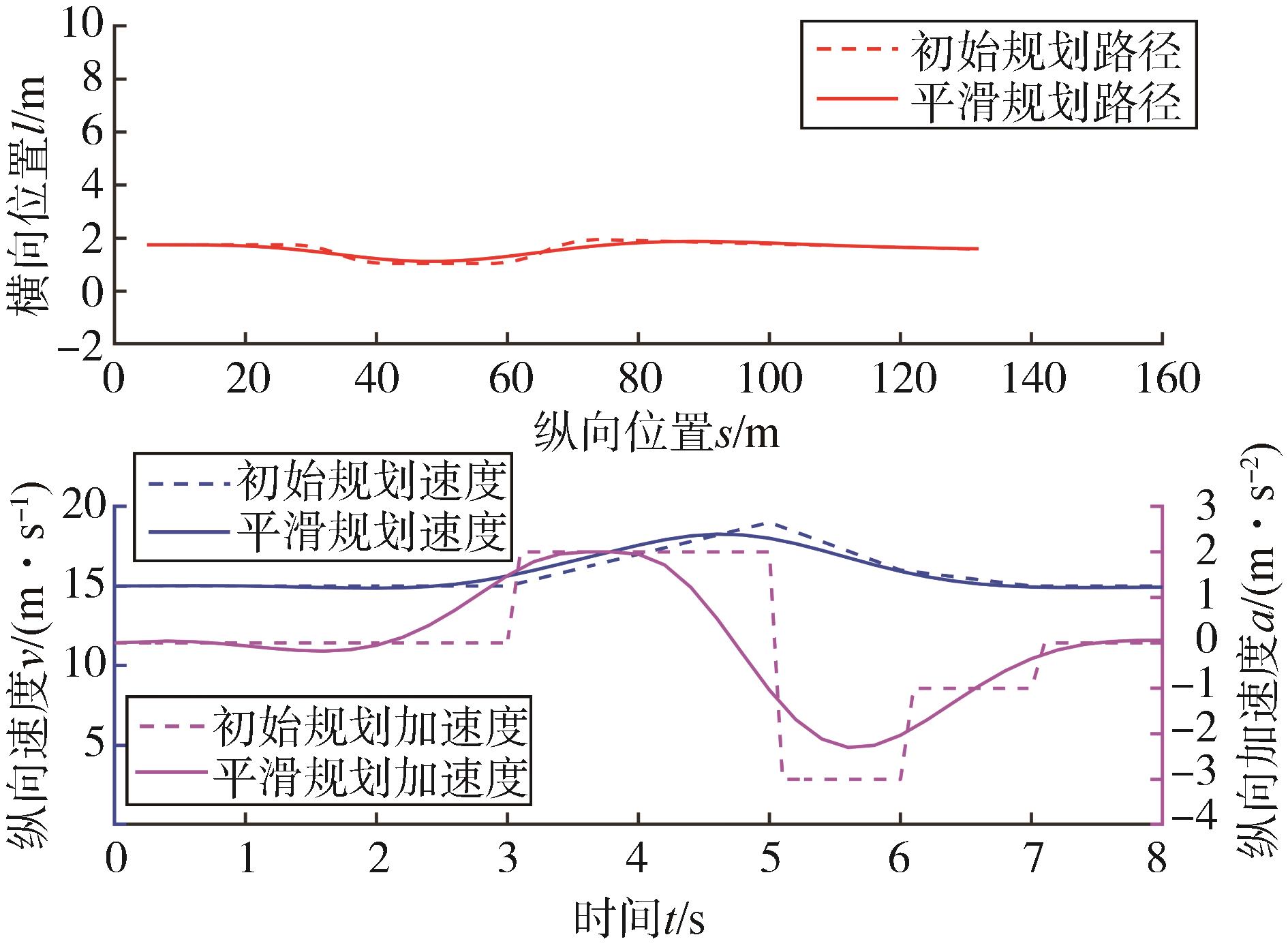
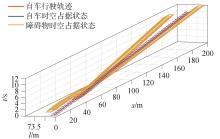
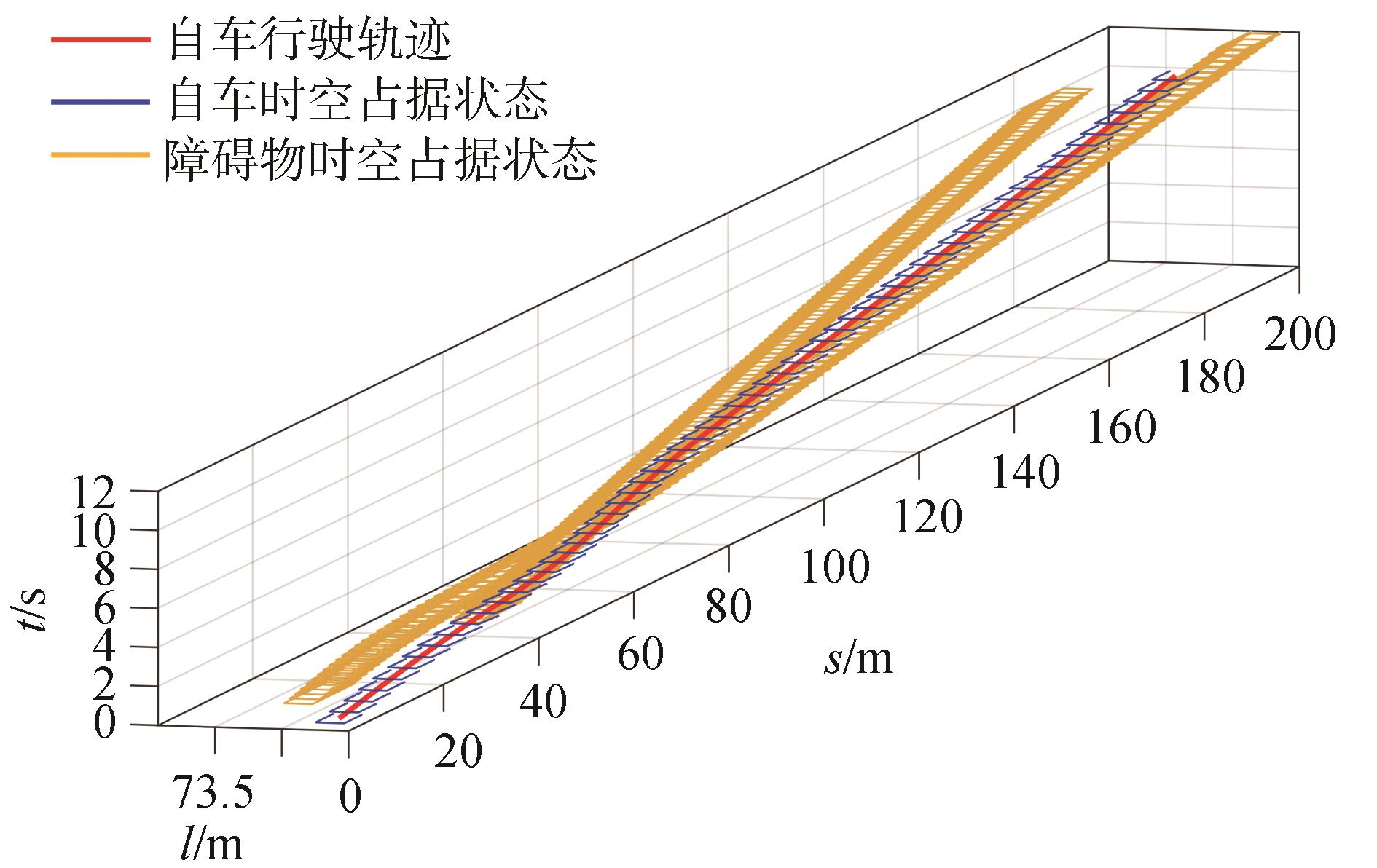
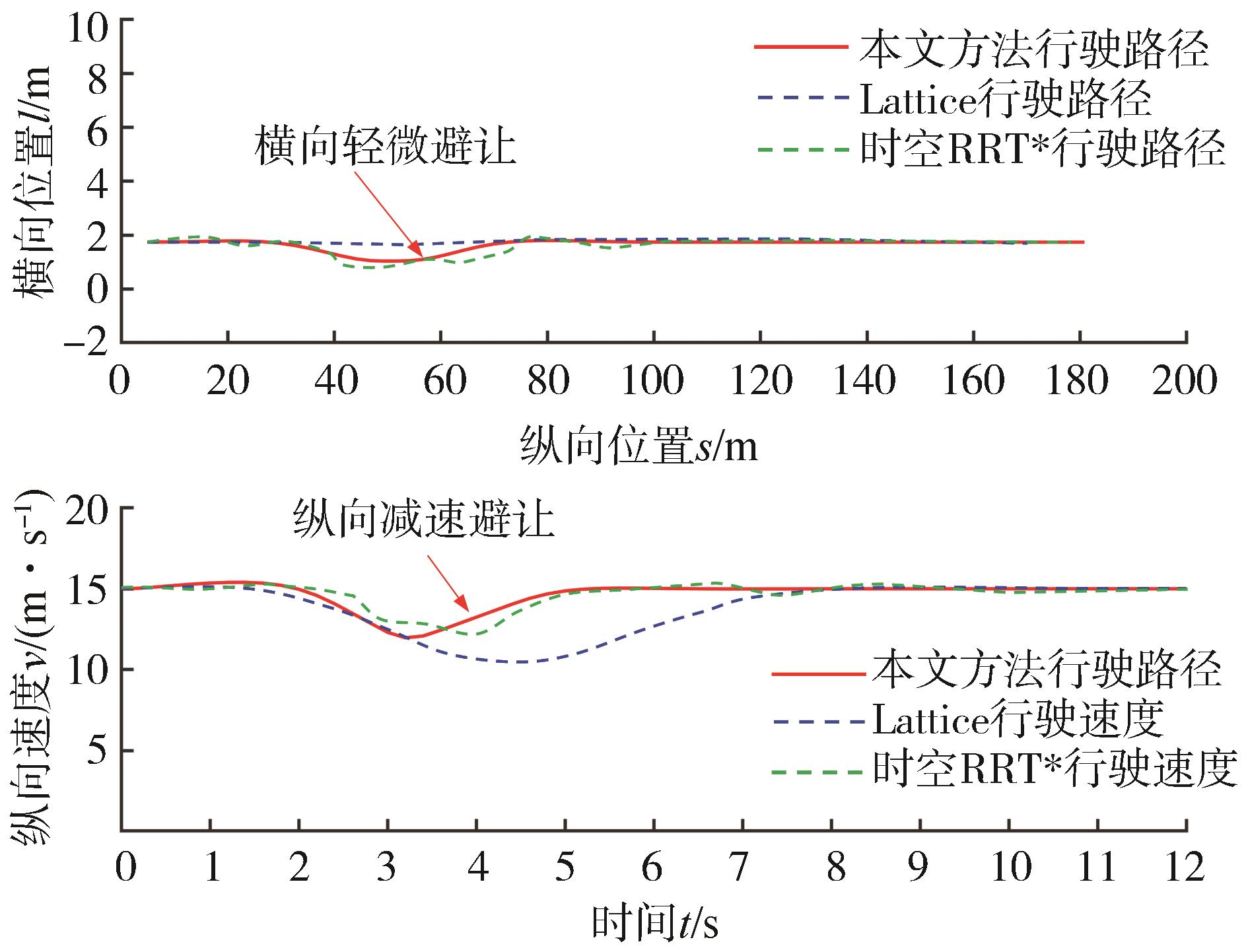
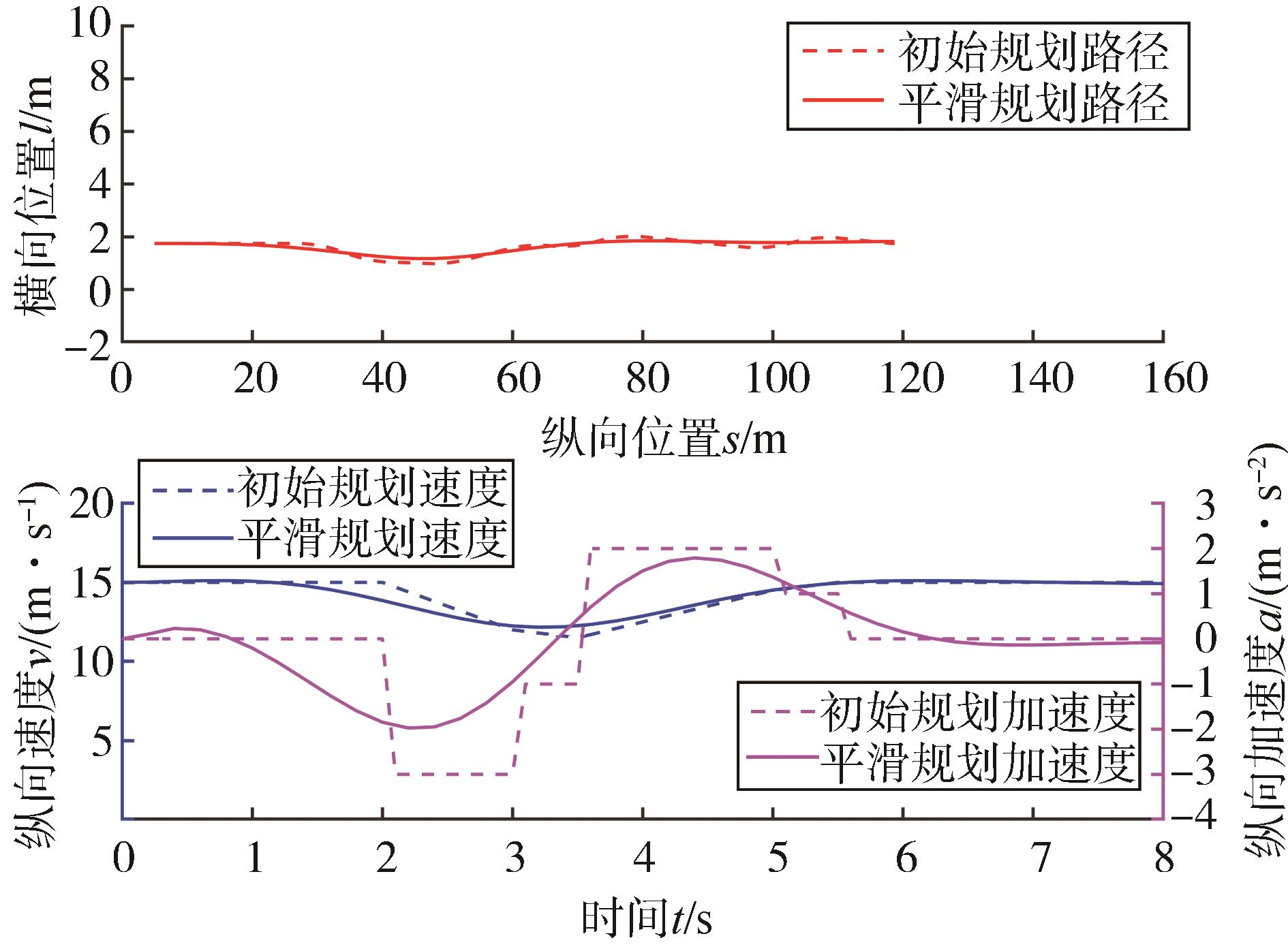
运动规划是自动驾驶系统生成轨迹的关键模块,现有运动规划多采用路径和速度解耦的方法,但解耦的规划方法在复杂动态场景下易陷入轨迹次优。本文提出了一种基于搜索和数值优化结合的时空联合运动规划方法,直接求解可行驶轨迹。首先使用改进混合A*在时空范围内进行轨迹粗搜索获得初始轨迹,然后以初始轨迹为参考构建可行驶时空走廊,并综合考虑车辆动力学和轨迹连续性约束等条件,使用数值优化的方法进一步平滑初始轨迹。选取换道超车和旁车切入两类典型复杂动态场景进行仿真测试,结果表明,所提时空联合规划方法相较于传统时空解耦规划方法更加灵活、规划结果更加合理,同时具有较好的计算实时性。