汽车工程 ›› 2023, Vol. 45 ›› Issue (8): 1438-1447.doi: 10.19562/j.chinasae.qcgc.2023.08.014
所属专题: 智能网联汽车技术专题-规划&决策2023年
高锋( ),冯德福,胡秋霞
),冯德福,胡秋霞
收稿日期:2023-02-10
修回日期:2023-03-13
出版日期:2023-08-25
发布日期:2023-08-17
通讯作者:
高锋
E-mail:gaofeng@edu.cn
基金资助:
Feng Gao(),Defu Feng,Qiuxia Hu
Received:2023-02-10
Revised:2023-03-13
Online:2023-08-25
Published:2023-08-17
Contact:
Feng Gao
E-mail:gaofeng@edu.cn
摘要:
非线性模型预测控制(nonlinear model predictive control, NMPC)是一种有效的自动驾驶运动规划方法,但数值优化对计算资源的巨大需求限制其实际应用。本文通过降低优化变量维度,简化非凸避障约束,提高NMPC运动规划系统数值优化的求解速度。针对车辆动力学的强非线性,采用拉格朗日插值逼近动力学方程和目标函数,在保证精度的前提下有效较少离散点。并在数值分析离散化误差分布特征基础上,设计拉格朗日多项式阶次自适应策略,进一步减少了优化变量维度。通过提出综合椭圆和线性时变约束的混合避障约束策略,在保证安全性的同时实现了数值优化难度与优化结果保守性之间的良好平衡。在多障碍物场景下,通过仿真和实验验证了所提方法的加速效果和性能。结果表明,与传统方法相比离散化精度和求解效率分别提高了74%和60%。
高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447.
Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control[J]. Automotive Engineering, 2023, 45(8): 1438-1447.
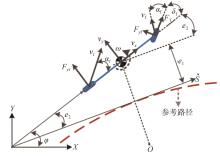
图1
车辆动力学耦合模型变量定义"
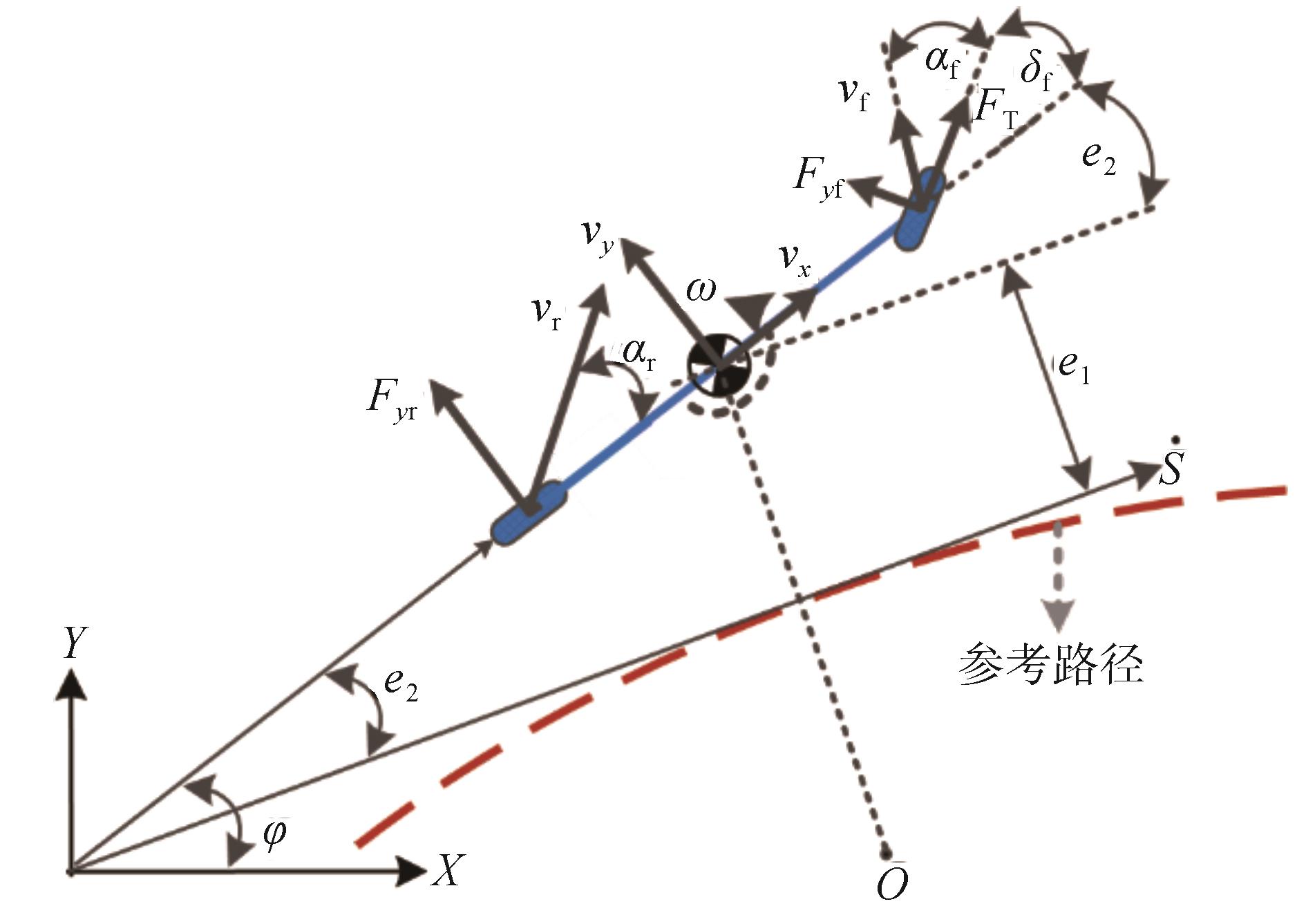

图2
仿真场景"
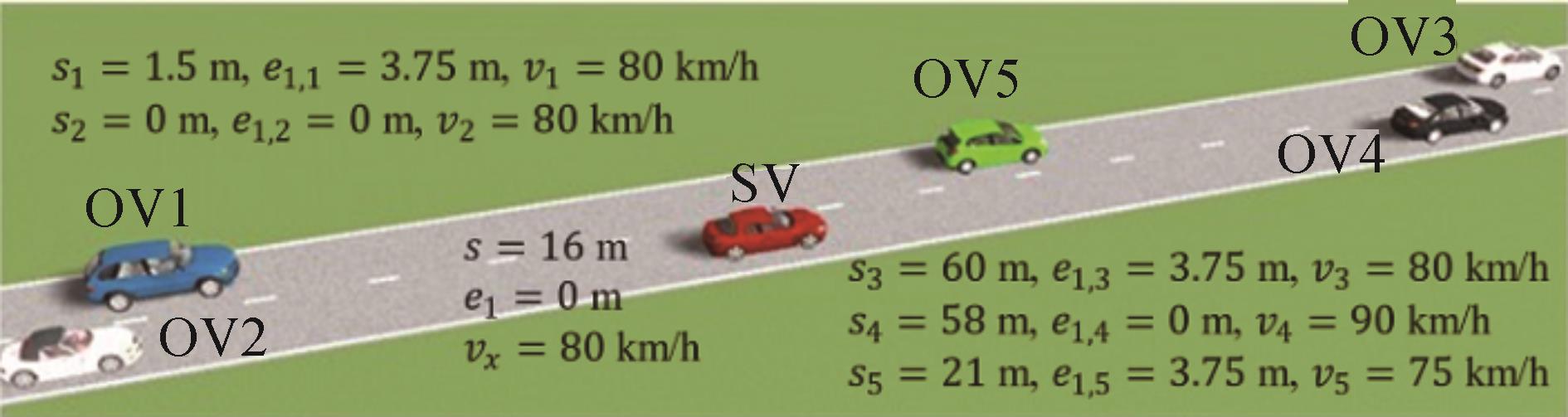
表1
NMPC运动规划参数"
| 参数 | 教值 |
|---|---|
表2
车辆动力学模型参数"
| 符号 | 单位 | 数值 |
|---|---|---|
| 1 943 | ||
| 1 460 | ||
| 1.17 | ||
| 1.77 | ||
| 54 600 | ||
| 54 600 |
图3
每个周期的仿真时间统计结果"
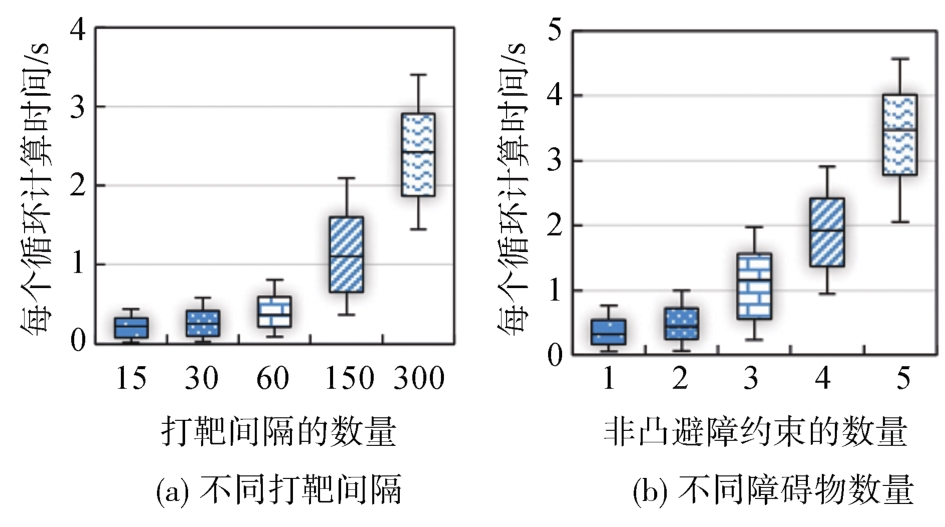
图4
车辆控制输入的对比结果"
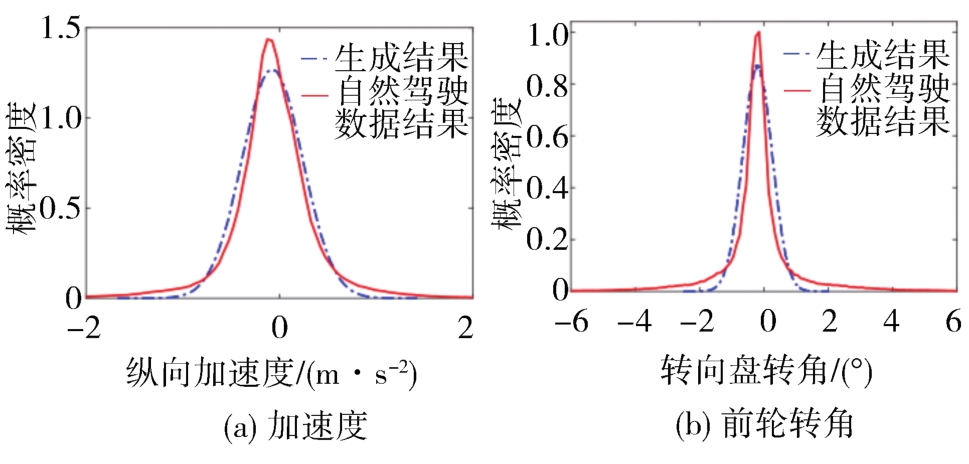
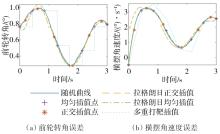
图5
典型拟合结果"
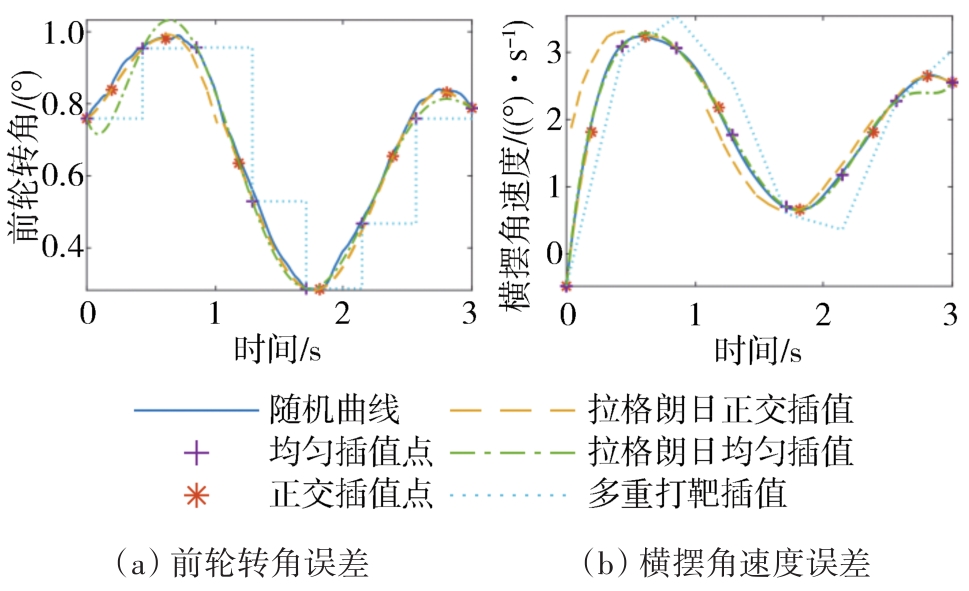
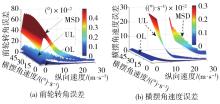
图6
拟合误差对比结果"
图7
插值阶次自适应策略"
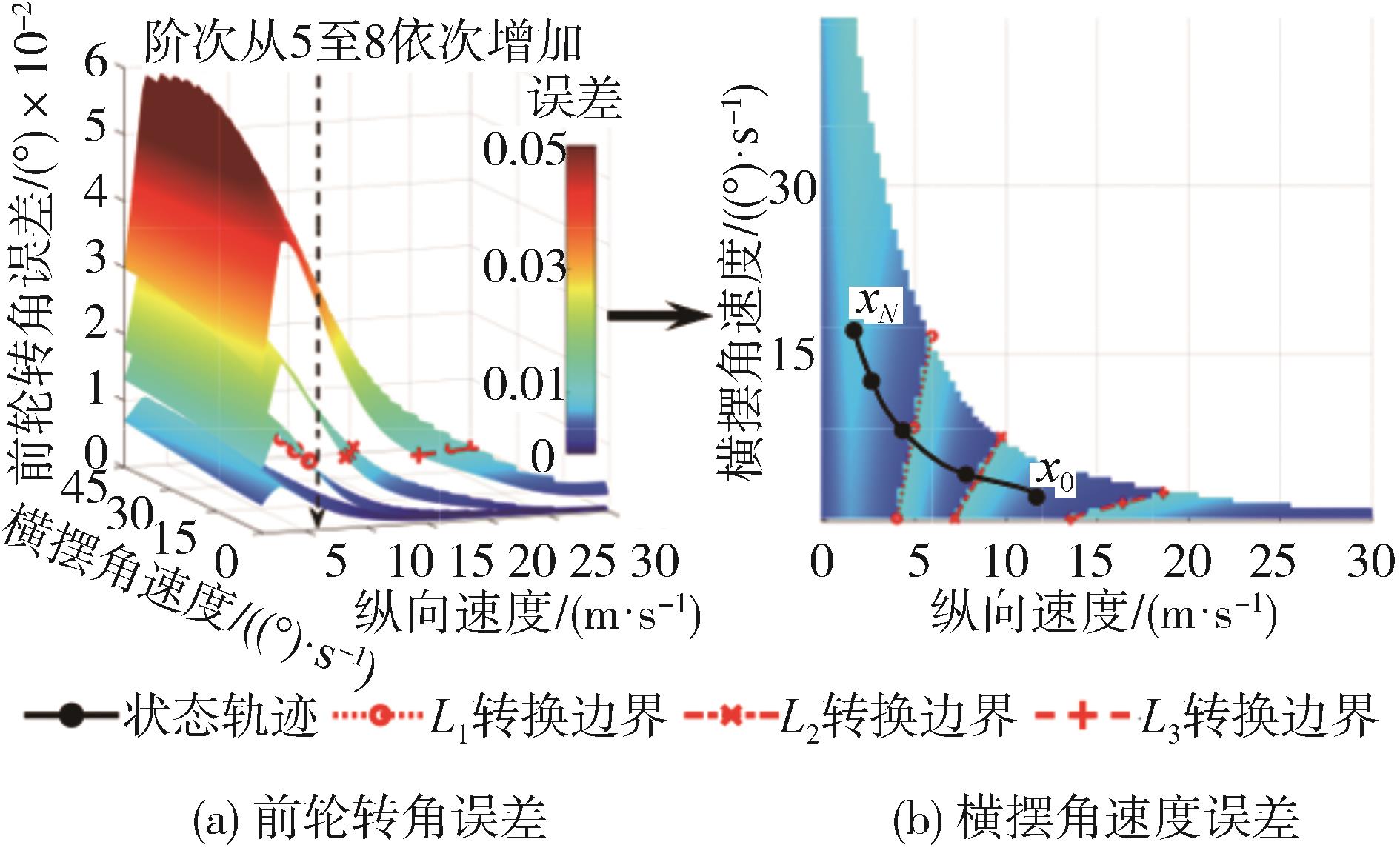
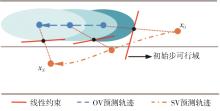
图8
基于动态线性约束集的凸化"
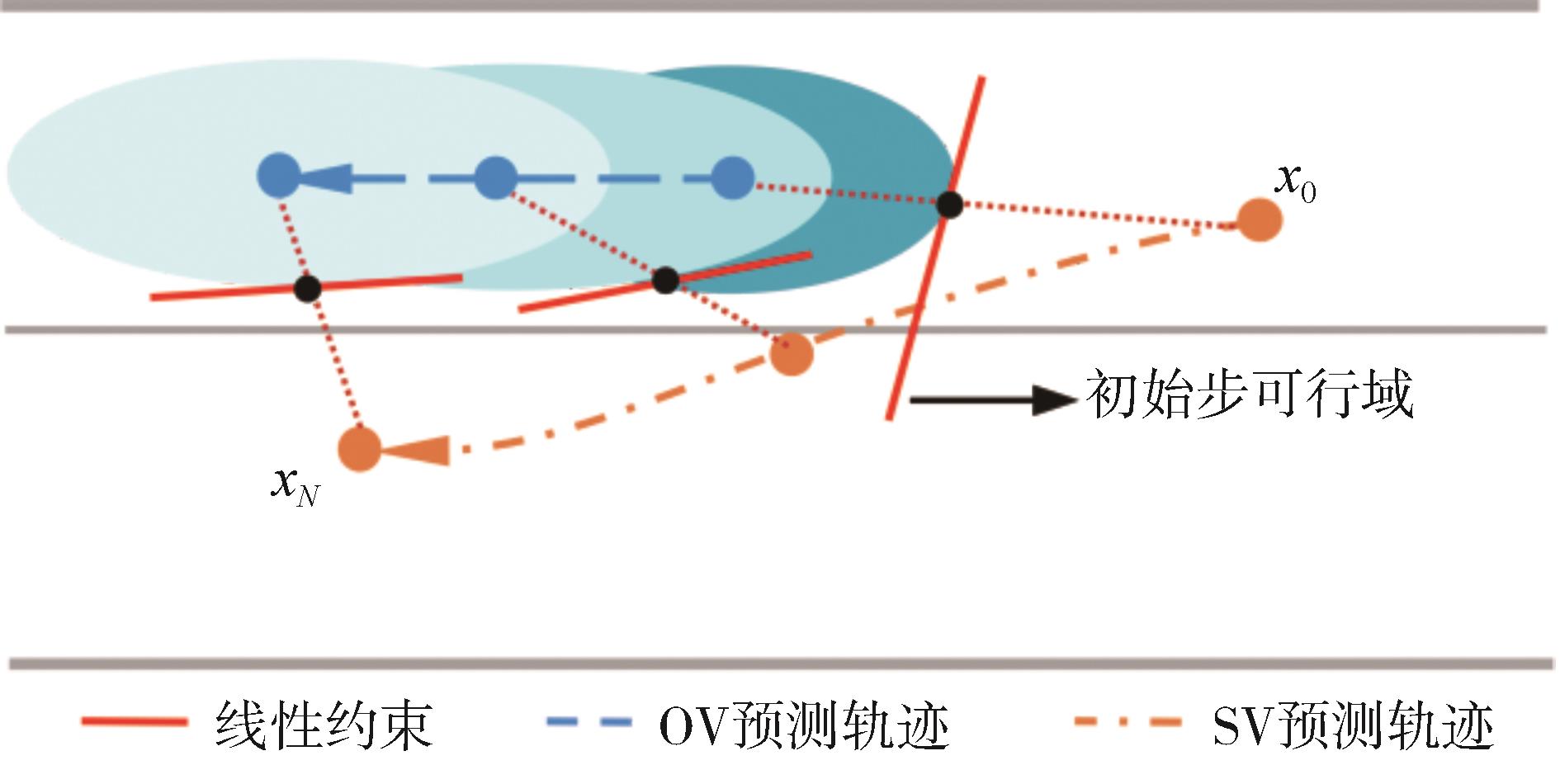

图9
混合避障约束"
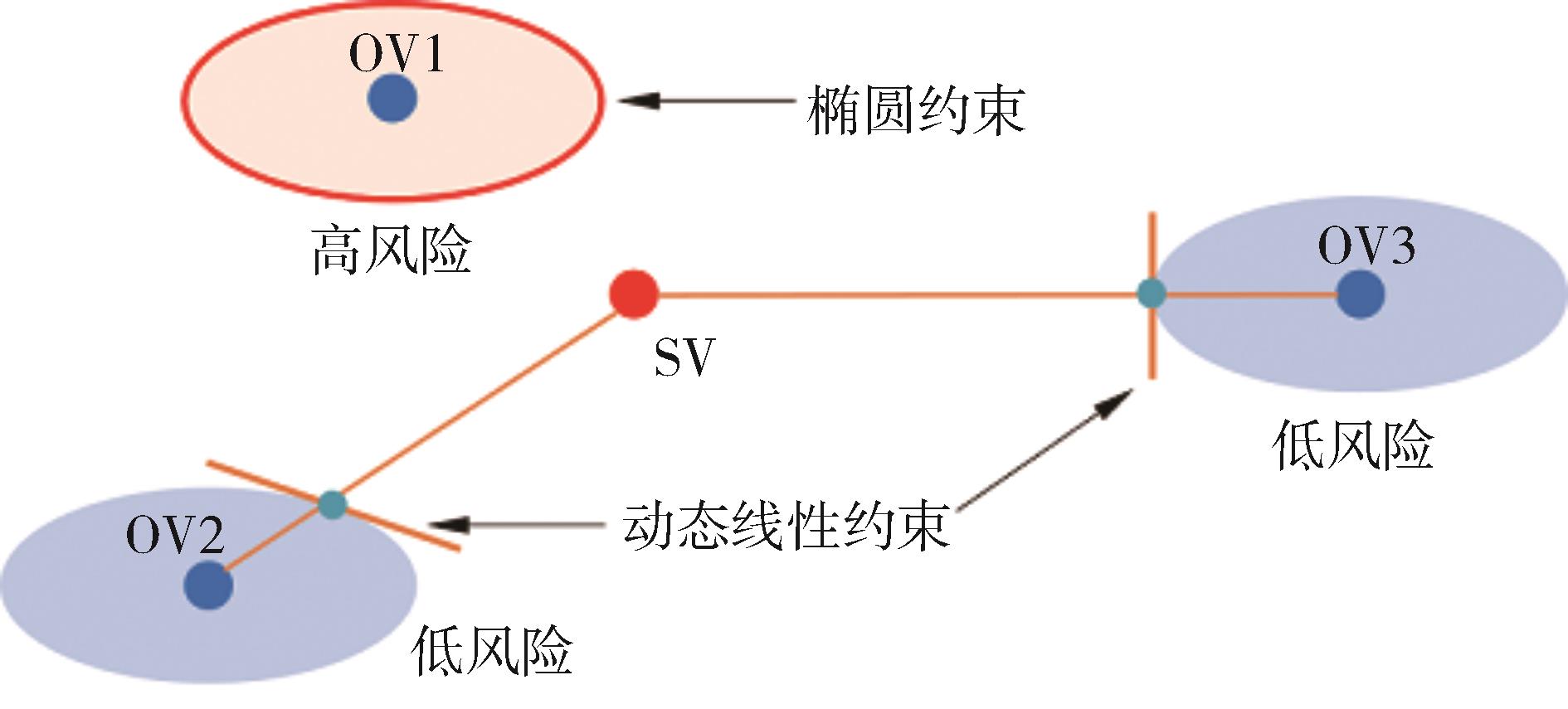
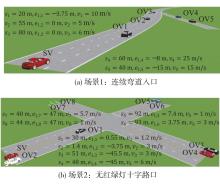
图10
仿真场景"
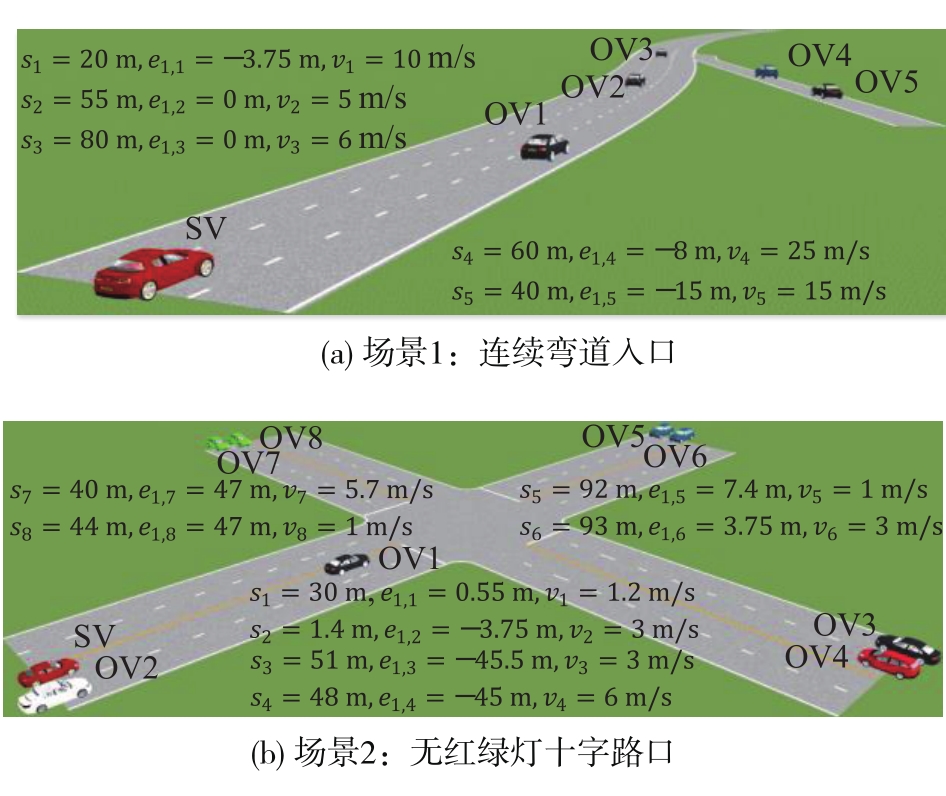
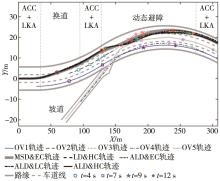
图11
SV和OVs的轨迹(场景1)"
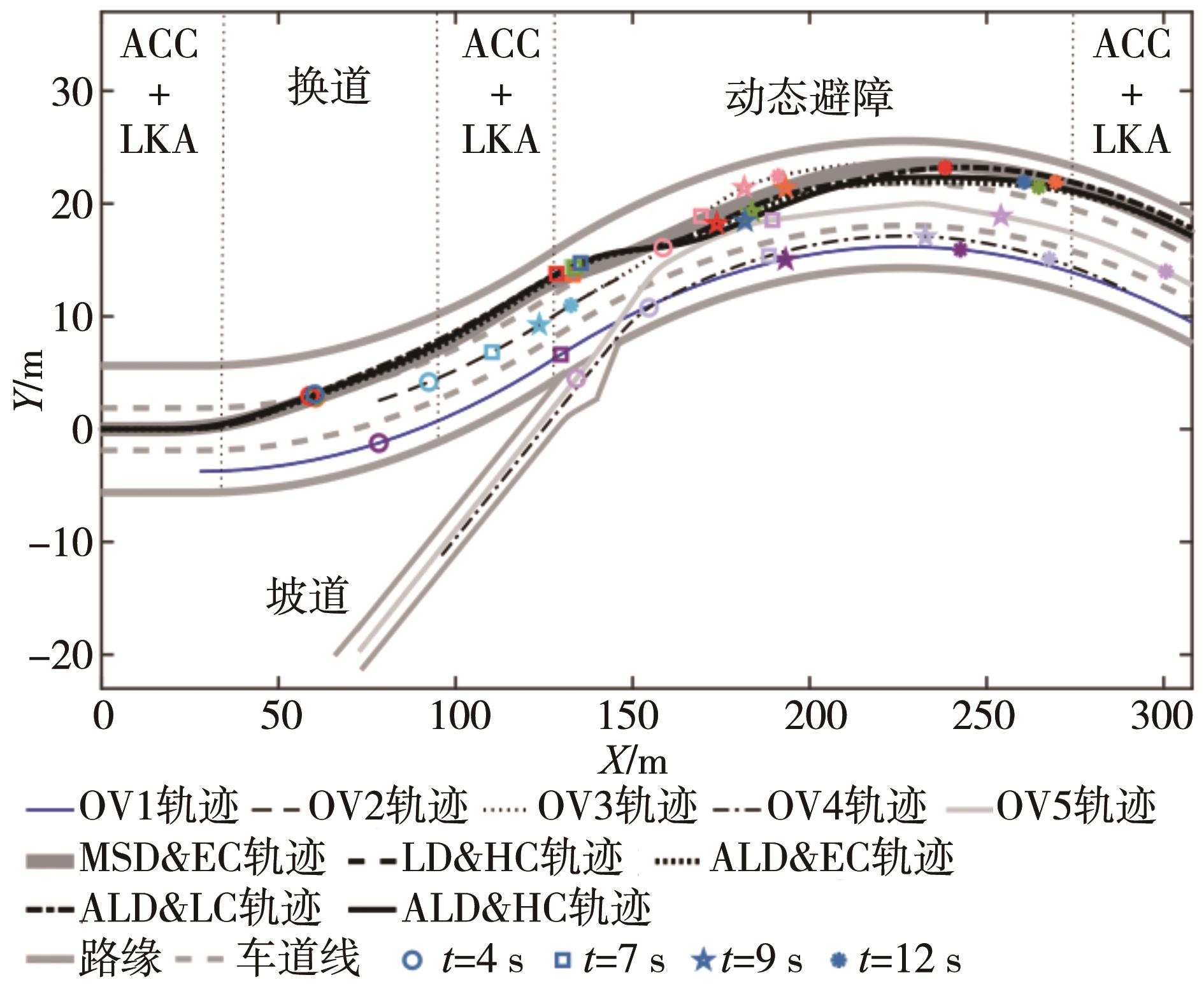

图12
SV状态量和控制输入(场景1)"
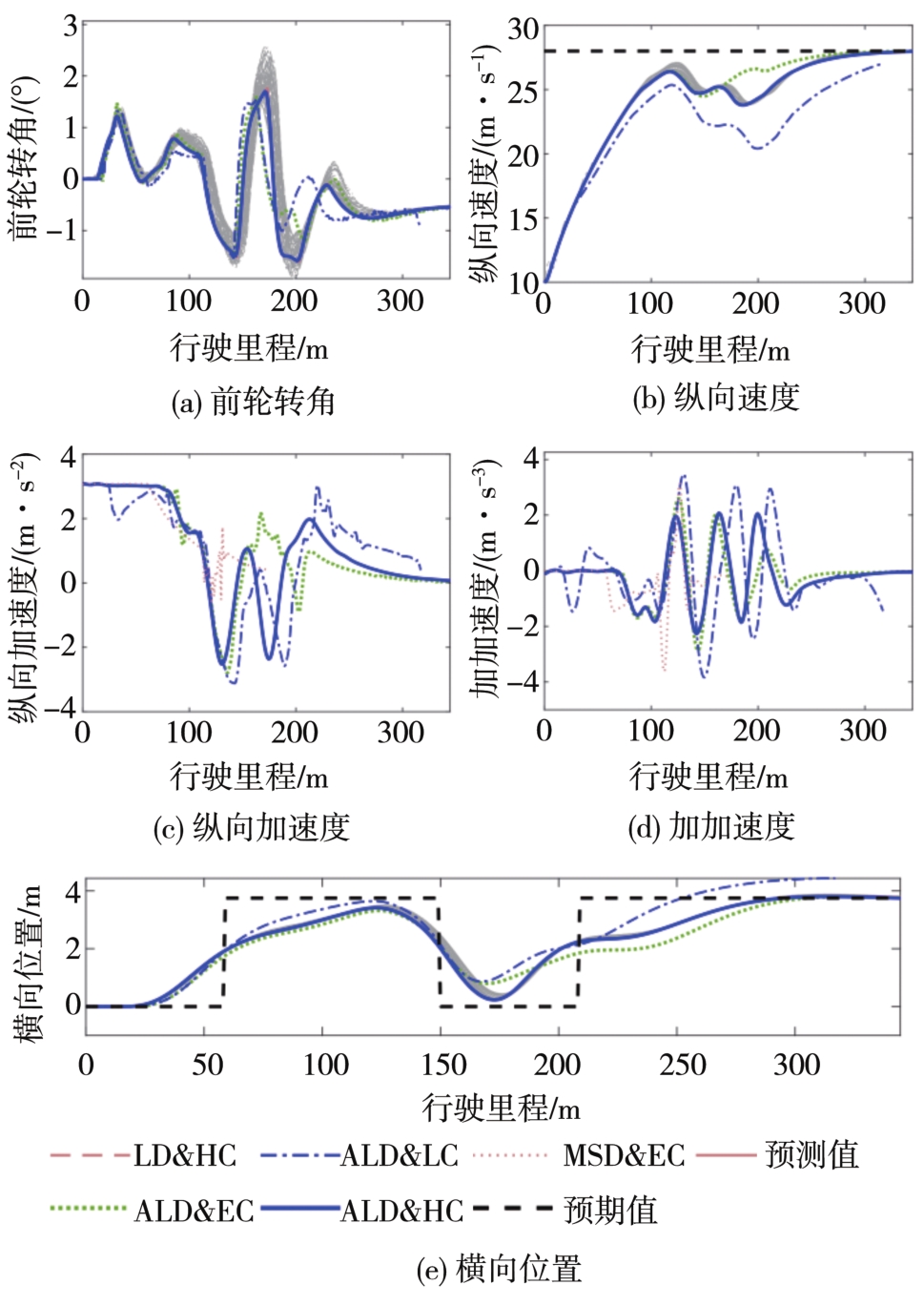
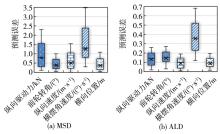
图13
预测误差对比结果(场景1)"
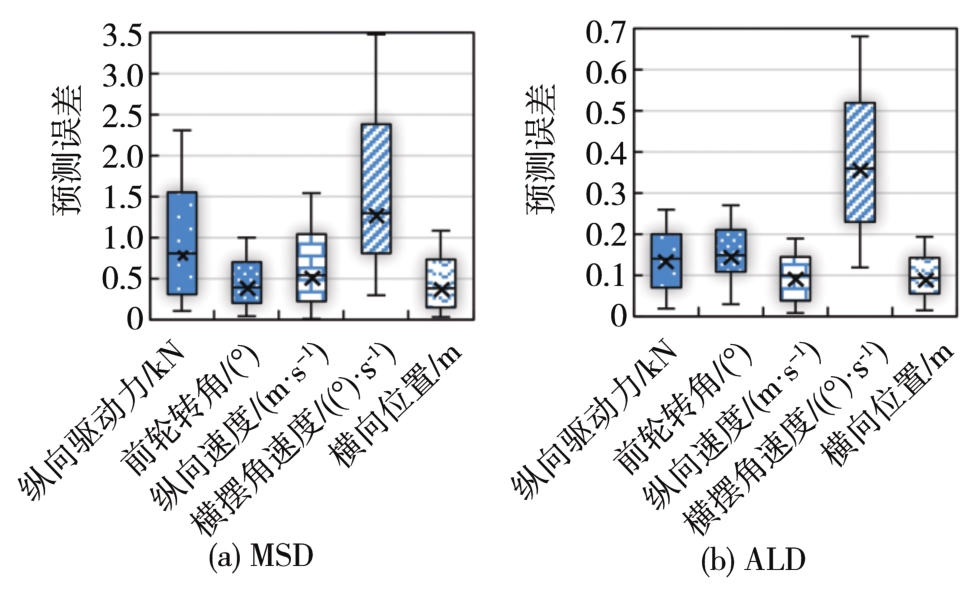

图14
SV和OVs的轨迹(场景2)"
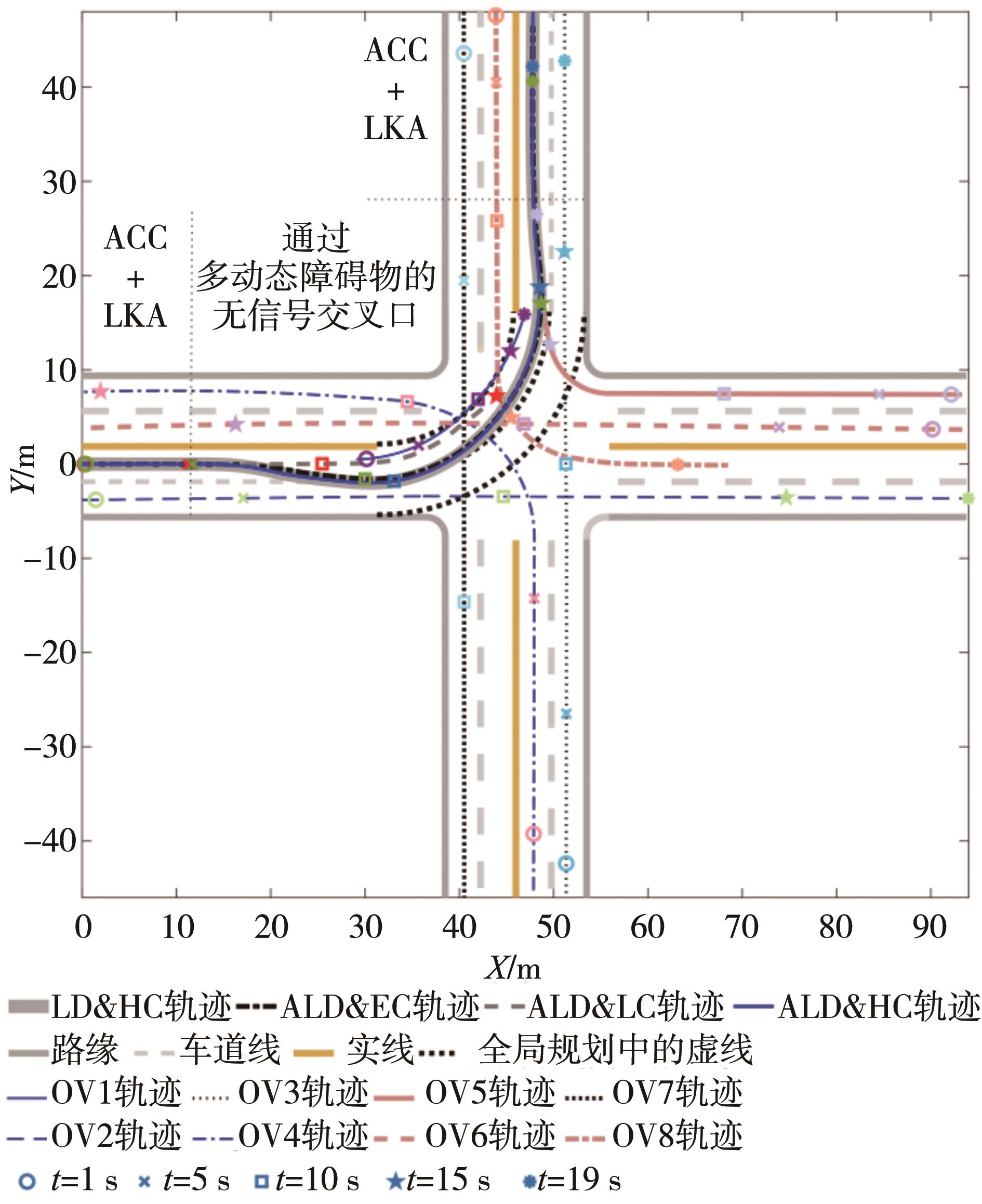
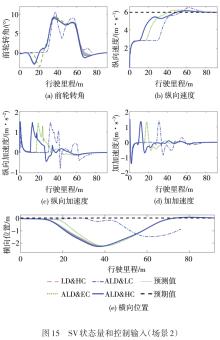
图15
SV状态量和控制输入(场景2)"
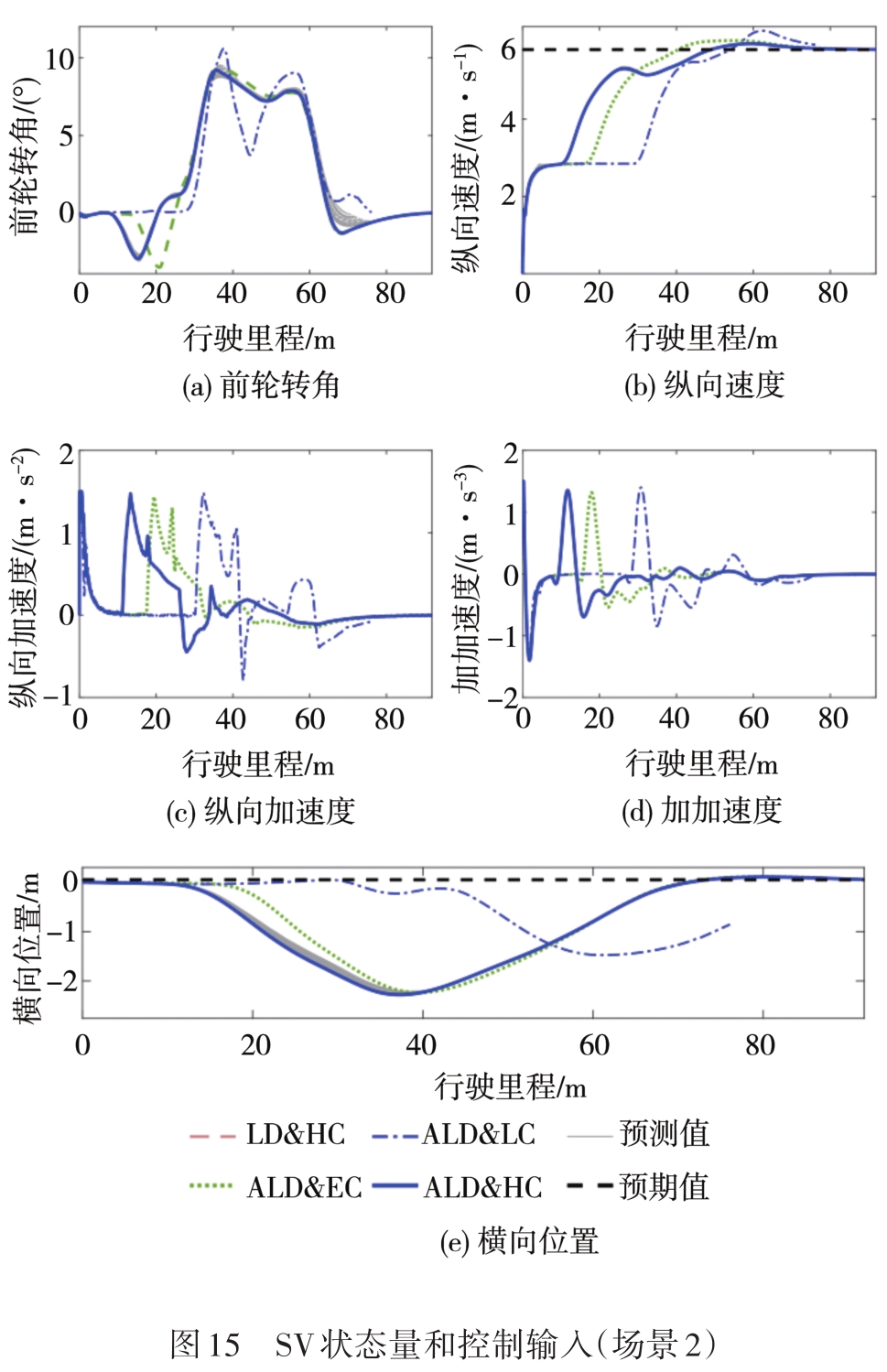
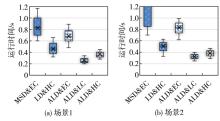
图16
运行时间统计结果"
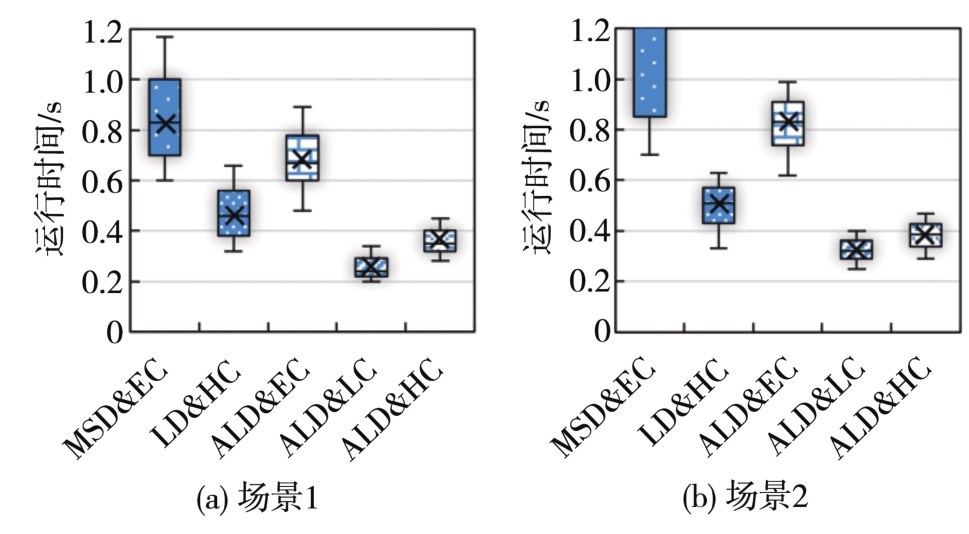

图17
实验平台"
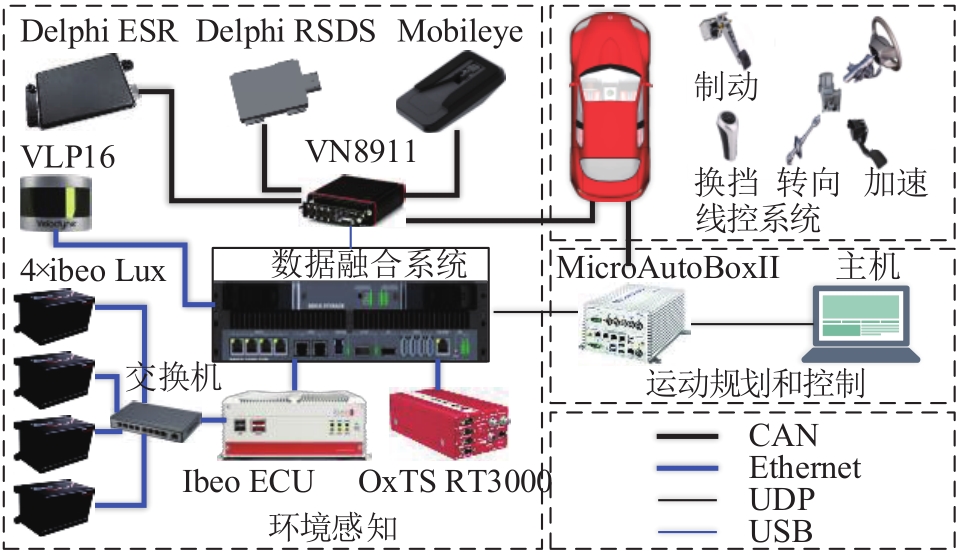

图18
场景1实验结果"
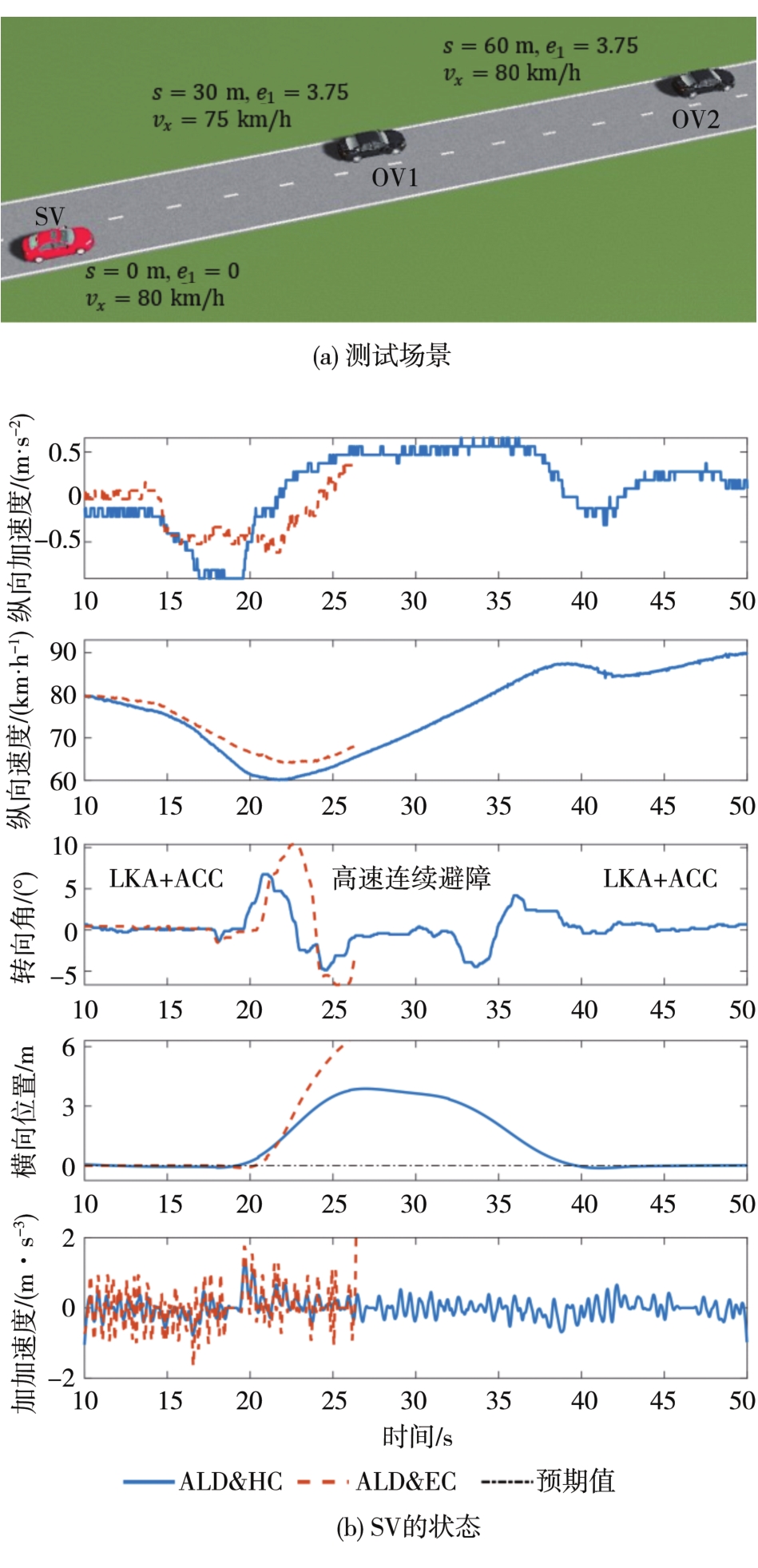
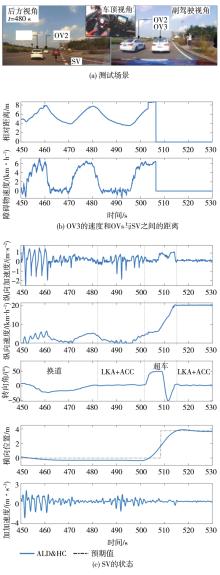
图19
场景2实验结果"


图20
计算时间统计结果"

| 1 | GAO F, DANG D, HE Y. Robust coordinated control of nonlinear heterogeneous platoon interacted by uncertain topology[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 4982-4992. |
| 2 | 高振海, 朱乃宣, 高菲,等. 考虑驾驶员特性的自学习换道轨迹规划系统[J]. 汽车工程, 2021, 42(12): 1710-1717. |
| GAO Z, ZHU N, GAO F, et al. Self-learning lane-change trajectory planning system with driver characteristics[J]. Automotive Engineering, 2021, 42(12): 1710-1717. | |
| 3 | 袁静妮, 杨林, 唐晓峰,等. 基于改进RRT*与行驶轨迹优化的智能汽车运动规划[J]. 自动化学报, 2022, 48(9): 2168-2177. |
| YUAN J, YANG L, TANG X, et al. Autonomous vehicle motion planning based on improved RRT* algorithm and trajectory optimization[J]. Acta Automatica Sinica, 2022, 48(9): 2168-2177. | |
| 4 | CLAUSSMANN L, REVILLOUD M, GRUYER D, et al. A review of motion planning for highway autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(5): 1826-1848. |
| 5 | 周维, 过学迅, 裴晓飞,等. 基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J]. 汽车工程, 2020, 42(9): 1151-1158. |
| ZHOU W, GUO X, PEI X, et al. Study on path planning and tracking control for intelligent vehicle based on RRT and MPC[J]. Automotive Engineering, 2020, 42(9): 1151-1158. | |
| 6 | CHEN Y, SCARABOTTOLO N, BRUSCHETTA M, et al. Efficient move blocking strategy for multiple shooting-based nonlinear model predictive control[J]. IET Control Theory & Applications, 2020, 14(2): 343-351. |
| 7 | FALCONE P, BORRELLI F, TSENG H E, et al. Linear time-varying model predictive control and its application to active steering systems: stability analysis and experimental validation[J]. International Journal of Robust and Nonlinear Control, 2008, 18(8): 862-875. |
| 8 | CARVALHO A, GAO Y, GRAY A, et al. Predictive control of an autonomous ground vehicle using an iterative linearization approach[C]. International IEEE Conference on Intelligent Transportation Systems, Hague Netherlands 6-9 Oct., 2013: 2335-2340. |
| 9 | WANG Q. Predictive maneuver planning and control of an autonomous vehicle in multi-vehicle traffic with observation uncertainty[D]. Clemson University, 2017. |
| 10 | PAUCA O, MAXIM A, CARUNTU C F. Control architecture for cooperative autonomous vehicles driving in platoons at highway speeds[J]. IEEE Access, 2021, 9: 153472-153490. |
| 11 | CHENG S, LI L, CHEN X, et al. Model-predictive-control-based path tracking controller of autonomous vehicle considering parametric uncertainties and velocity-varying[J]. IEEE Transactions on Industrial Electronics, 2020, 68(9): 8698-8707. |
| 12 | BROWN M, GERDES J C. Coordinating tire forces to avoid obstacles using nonlinear model predictive control[J]. IEEE Transactions on Intelligent Vehicles, 2020, 5(1): 21-31. |
| 13 | POTENA C, DELLA C B, NARDI D, et al. Non-linear model predictive control with adaptive time-mesh refinement[C]. IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots, San Francisco USA, 13-16 Dec., 2018: 74-80. |
| 14 | DIXIT S, MONTANARO U, DIANATI M, et al. Trajectory planning for autonomous high-speed overtaking in structured environments using robust MPC[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(6): 2310-2323. |
| 15 | ZIEGLER J, BENDER P, DANG T, et al. Trajectory planning for Bertha-a local continuous method[C]. IEEE Intelligent Vehicles Symposium, Michigan, USA, 8-11 Jun., 2014: 450-457. |
| 16 | ZHANG Y, CHEN H, WASLANDER S L, et al. Hybrid trajectory planning for autonomous driving in highly constrained environments[J]. IEEE Access, 2018, 6: 32800-32819. |
| 17 | QUIRYNEN R, BERNTORP K, KAMBAM K, et al. Integrated obstacle detection and avoidance in motion planning and predictive control of autonomous vehicles[C]. American Control Conference, Denver USA, 1-3 Jul., 2020: 1203-1208. |
| 18 | PAN Y, LIN Q, SHAH H, et al. Safe planning for self-driving via adaptive constrained ILQR[C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas USA, 24-30 Oct., 2020: 2377-2383. |
| 19 | DANG D, GAO F, HU Q. Motion planning for autonomous vehicles considering longitudinal and lateral dynamics coupling[J]. Applied Sciences, 2020, 10(9): 3180. |
| 20 | GAO F, HU Q, MA J, et al. A simplified vehicle dynamics model for motion planner designed by nonlinear model predictive control [J]. Applied Sciences, 2021, 11(21): 9887-9904. |
| 21 | ANDERSSON J A E, GILLIS J, HORN G, et al. CasADi: a software framework for nonlinear optimization and optimal control[J]. Mathematical Programming Computation, 2019, 11(1): 1-36. |
| 22 | DUAN J, GAO F, HE Y. Test scenario generation and optimization technology for intelligent driving systems[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(1): 115-127. |
| 23 | GAO F, DUAN J, HAN Z, et al. Automatic virtual test technology for intelligent driving systems considering both coverage and efficiency[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14365-14376. |
| 24 | FAHROO F, ROSS I M. Advances in pseudospectral methods for optimal control[C]. AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu Hawaii, 6-9 Aug., 2008: 7309. |
| 25 | 王明强, 王震坡, 张雷. 基于碰撞风险评估的智能汽车局部路径规划方法研究[J]. 机械工程学报, 2021, 57(10): 28-41. |
| WANG M, WANG Z, ZHANG L. Local path planning for intelligent vehicles based on collision risk evaluation[J]. Journal of Mechanical Engineering, 2021, 57(10): 28-41. | |
| 26 | BRITO B, AGARWAL A, ALONSO M J. Learning interaction-aware guidance policies for motion planning in dense traffic scenarios[J]. arXiv preprint arXiv:, 2021. |
| 27 | MEYER M A, SAUTER L, GRANRATH C, et al. Simulator coupled with distributed co-simulation protocol for automated driving tests[J]. Automotive Innovation, 2021, 4(4): 373-389. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 赵晓聪,房世玉,李子睿,孙剑. 社会性驾驶交互关键效用析取与应用[J]. 汽车工程, 2024, 46(2): 230-240. |
| [3] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [4] | 刘卫国,项志宇,刘伟平,齐道新,王子旭. 基于分布式强化学习的车辆控制算法研究[J]. 汽车工程, 2023, 45(9): 1637-1645. |
| [5] | 刘卫国,项志宇,刘锐,李国栋,王子旭. 基于深度学习的端到端车辆运动规划方法研究[J]. 汽车工程, 2023, 45(8): 1343-1352. |
| [6] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [7] | 冉巍,陈慧,杨佳鑫,西村要介,国朝鵬,尹又雨. 基于效用理论的运动规划奖励函数设计方法[J]. 汽车工程, 2023, 45(8): 1373-1382. |
| [8] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [9] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [10] | 芦涛,金馨,廖毅霏,黄圣杰,杨依琳,谢国涛,秦晓辉. 基于雅克比域零空间边缘化的视觉SLAM[J]. 汽车工程, 2023, 45(8): 1457-1467. |
| [11] | 伍文广,田双岳,张志勇,张斌. 非铺装道路凹凸不平特征语义分割方法研究[J]. 汽车工程, 2023, 45(8): 1468-1478. |
| [12] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [13] | 赵东宇, 赵树恩. 基于级联YOLOv7的自动驾驶三维目标检测[J]. 汽车工程, 2023, 45(7): 1112-1122. |
| [14] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [15] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
|