汽车工程 ›› 2022, Vol. 44 ›› Issue (9): 1305-1317.doi: 10.19562/j.chinasae.qcgc.2022.09.002
所属专题: 智能网联汽车技术专题-规划&控制2022年
段顺昌1,2,白先旭1,2( ),石琴1,2,李维汉1,2,何冠男1,2
),石琴1,2,李维汉1,2,何冠男1,2
收稿日期:2022-03-27
修回日期:2022-04-29
出版日期:2022-09-25
发布日期:2022-09-21
通讯作者:
白先旭
E-mail:bai@hfut.edu.cn
基金资助:
Shunchang Duan1,2,Xianxu Bai1,2(),Qin Shi1,2,Weihan Li1,2,Guannan He1,2
Received:2022-03-27
Revised:2022-04-29
Online:2022-09-25
Published:2022-09-21
Contact:
Xianxu Bai
E-mail:bai@hfut.edu.cn
摘要:
自动驾驶车辆所面临的安全风险不仅来自于功能安全和信息安全不足,还来自于自动驾驶系统内部的预期功能安全(safety of the intended functionality, SOTIF)不足的风险。自动紧急制动(automatic emergency braking, AEB)系统作为自动驾驶系统的重要组成部分,在控制策略层面存在SOTIF不足的风险。采用系统理论过程分析的方法对AEB系统进行安全分析,找出可能引发危害的触发事件并提出相应的安全目标。针对安全目标,提出一种基于细分场景的AEB系统控制策略。在CarSim-MATLAB/Simulink环境下对所提出的AEB系统控制策略进行验证。结果表明,在事件接受准则和总体风险接受准则两个层面上功能修改后的系统风险水平均显著降低,系统的安全水平明显提升。
段顺昌,白先旭,石琴,李维汉,何冠男. 汽车自动紧急制动系统控制策略的预期功能安全设计[J]. 汽车工程, 2022, 44(9): 1305-1317.
Shunchang Duan,Xianxu Bai,Qin Shi,Weihan Li,Guannan He. The Design of the Safety of the Intended Functionality of the Control Strategies for Vehicle Automatic Emergency Braking System[J]. Automotive Engineering, 2022, 44(9): 1305-1317.
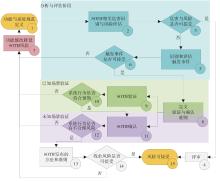
图1
SOTIF设计流程"


图2
AEB系统运行场景"
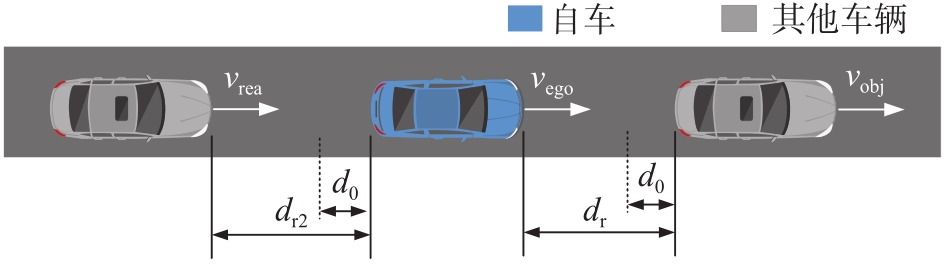
表1
AEB系统可能造成的危害评估"
| 损失级别 | 损失内容 |
|---|---|
| LV1 | 引起驾乘人员不舒适 |
| LV2 | 妨碍驾驶员正常驾驶 |
| LV3 | 妨碍其他交通参与者 |
| LV4 | 碰撞造成车体损坏 |
| LV5 | 碰撞造成人员伤亡 |
表2
AEB系统的危害事件评估"
| 危害事件 | 危害具体描述 | 损失详情 |
|---|---|---|
| HV1 | 当障碍物达到预警距离时,系统未执行预警 | LV1 |
| HV2 | 当障碍物达到制动距离时,系统未执行制动 | LV1-LV5 |
| HV3 | 当前方环境无碰撞风险时,系统进行预警 | LV1、LV2 |
| HV4 | 当前方环境无碰撞风险时,系统进行制动 | LV1-LV3/LV4 |

图3
AEB系统STPA控制架构"

表3
AEB系统的HV2和HV4级触发事件与安全目标"
| 编号 | 触发事件 | 潜在 危害 | 危害分类 | 安全目标 |
|---|---|---|---|---|
| HZ-01 | 车辆在湿滑路面行驶,车辆减速避撞 | 与障碍物相撞 | HV2 | 避免湿滑路面上系统介入不及时 |
| HZ-02 | 车辆在条件极好的路面行驶,车辆减速避撞 | 车辆被后车追尾 | HV4 | 避免良好路面上系统介入过早 |
| HZ-03 | 自车行驶速度过快,车辆减速避撞 | 与障碍物相撞 | HV2 | 避免自车高速行驶下系统介入不及时 |
| HZ-04 | 前车急减速,自车减速避撞 | 与障碍物相撞 | HV2 | 避免前车急减速下系统介入不及时 |
| HZ-05 | 前车缓慢减速,自车减速避撞 | 车辆被后车追尾 | HV4 | 避免前车缓慢减速下系统介入过早 |
| HZ-06 | 前车低速匀速行驶,自车减速避撞 | 与障碍物相撞 | HV2 | 避免前车低速行驶下系统介入不及时 |
| HZ-07 | 前车低速匀速行驶,自车减速避撞 | 车辆被后车追尾 | HV4 | 避免前车低速行驶下系统介入过早 |
图4
驾驶员制动过程示意图"
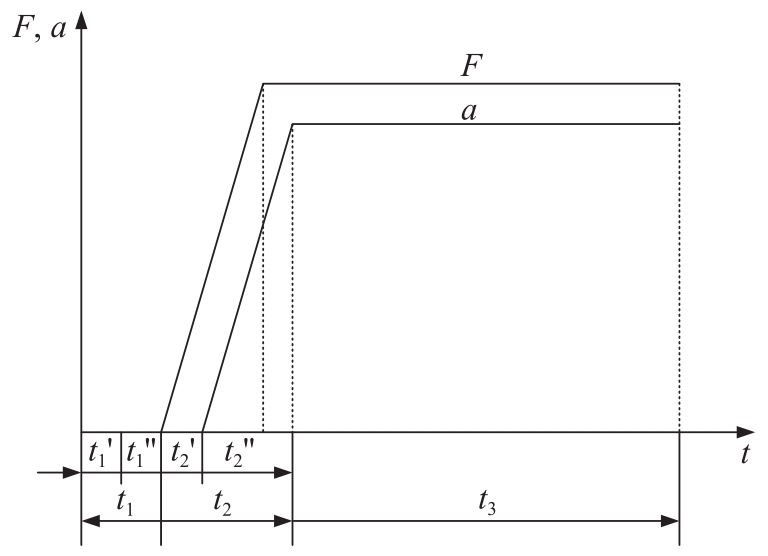
表4
基于细分场景的AEB系统安全边界"
| 场景 | 安全边界 |
|---|---|
| 前车静止 | |
| 前车匀速行驶 | |
| 前车缓慢减速(后于自车停止) | |
| 前车急减速(先于自车停止) |
表5
第一层接受准则中系统危害行为、量化指标及安全范围"
| 系统潜在危害行为 | 性能量化指标 | 指标安全范围 | 指标权重 | 指标编号 |
|---|---|---|---|---|
| 两车安全距离范围过远 | 两车安全距离d0 | d0 | 5 | ACUM01 |
| 两车安全距离范围过近 | 两车安全距离d0 | d0 | 10 | ACUM02 |
| 系统启动阶段制动强度小 | 制动阶段平均减速度aave | aave | 10 | ACUM03 |
| 遇到障碍物时系统启动时间过早 | 预计碰撞时间 | 5 | ACUM04 | |
| 紧急情况下制动系统未启动 | 制动系统启动ACT | ACT=0 | 500 | EVNT01 |
| 系统启动但避撞失败 | 成功避撞AVO | AVO=0 | 200 | EVNT02 |
表6
AEB系统标准测试场景"
| 场景 | 路面附着系数 | 两车初始距离 | 自车速度 | 前车速度 | 前车减速度 |
|---|---|---|---|---|---|
| CCRs | 0.7 | 60 | 30 | 0 | 0 |
| CCRm | 0.7 | 120 | 50 | 20 | 0 |
| CCRb | 0.7 | 40 | 50 | 50 | 2 |
| CCRb | 0.7 | 40 | 50 | 50 | 4 |

图5
车辆在高速公路的车速概率分布"
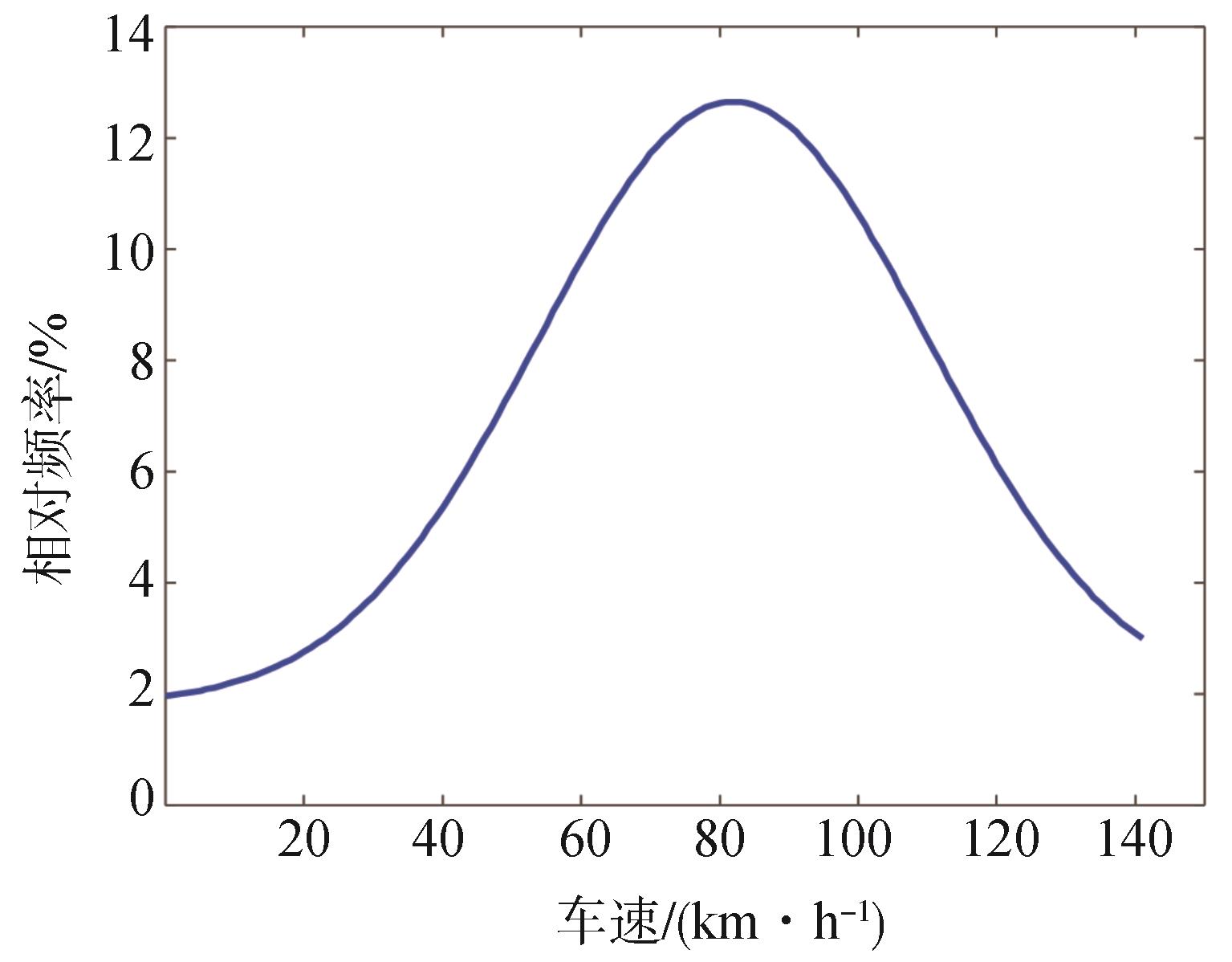
表7
AEB系统安全性未知测试场景"
| 场景 | 路面附着系数 | 两车初始距离 | 自车速度 | 前车速度 | 前车减速度 |
|---|---|---|---|---|---|
| CCRs | 0.7 | 120 | 75 | 0 | 0 |
| CCRs | 0.5 | 60 | 40 | 0 | 0 |
| CCRm | 0.5 | 120 | 50 | 10 | 0 |
| CCRb | 0.7 | 50 | 75 | 75 | 4 |
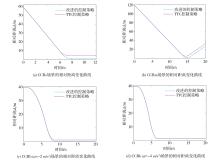
图6
标准测试场景下AEB系统性能的仿真结果"

表8
标准测试场景下功能改进前后的AEB系统风险水平"
| 场景 | 功能改进 | EVNT01 AVO | EVNT02 ACT | ACUM01 d0 | ACUM02 d0 | ACUM03 aave | ACUM04 | 单一场景风险 |
|---|---|---|---|---|---|---|---|---|
| CCRs | 前 | 0 | 0 | 4.542 | 4.542 | 6.3 | 1.2 | 62.7 |
| 后 | 0 | 0 | 1.06 | 1.06 | 6.3 | 0.78 | 0.02 | |
| CCRm | 前 | 0 | 0 | 4.519 | 4.519 | 6.3 | 1.2 | 61.9 |
| 后 | 0 | 0 | 1.04 | 1.04 | 6.3 | 0.78 | 0.08 | |
CCRb ( | 前 | 0 | 0 | 0.276 | 0.276 | 6.3 | 1.2 | 5.24 |
| 后 | 0 | 0 | 1.06 | 1.06 | 6.3 | 1.429 | 0.02 | |
CCRb ( | 前 | 0 | 0 | 1.085 | 1.085 | 6.3 | 1.2 | 0.04 |
| 后 | 0 | 0 | 1.06 | 1.06 | 6.3 | 1.196 | 0.02 | |
总体风 险水平 | 前 | 129.88 | ||||||
| 后 | 0.14 | |||||||

图7
安全性未知测试场景下AEB系统性能的仿真结果"

表9
安全性未知场景下功能改进前后的AEB系统风险水平"
| 场景 | 功能改进 | EVNT01 AVO | EVNT02 ACT | ACUM01 d0 | ACUM02 d0 | ACUM03 aave | ACUM04 | 单一场景风险水平 |
|---|---|---|---|---|---|---|---|---|
CCRs ( | 前 | 0 | 1 | -1 | -1 | 6.3 | 1.2 | 200 |
| 后 | 0 | 0 | 1.406 | 1.406 | 6.3 | 1.67 | 0.82 | |
CCRs ( | 前 | 0 | 1 | -1 | -1 | 4.4 | 1.2 | 200 |
| 后 | 0 | 0 | 1.237 | 1.237 | 4.4 | 1.35 | 0.3 | |
| CCRm | 前 | 0 | 1 | -1 | -1 | 4.4 | 1.2 | 200 |
| 后 | 0 | 0 | 1.242 | 1.242 | 4.4 | 1.36 | 0.3 | |
| CCRb | 前 | 0 | 1 | -1 | -1 | 6.3 | 1.2 | 200 |
| 后 | 0 | 0 | 1.411 | 1.411 | 6.3 | 2.08 | 0.85 | |
总体风 险水平 | 前 | 800 | ||||||
| 后 | 2.27 | |||||||
| 1 | 金辉, 李昊天. 基于驾驶风格的前撞预警系统报警策略[J]. 汽车工程, 2021, 43(3):405-413. |
| JIN H, LI H T. Alarm strategy for frontal crash warning system based on driving style[J]. Automotive Engineering, 2021, 43(3):405-413. | |
| 2 | World Health Organization. Road traffic injuries[R]. Geneva: WHO, 2021. |
| 3 | National Transpotation Safety Board. Collision between vehicle controlled by developmental automated driving system and pedestrian, Tempe, Arizona, March 18[R]. Washington: NTSB, 2019. |
| 4 | National Transpotation Safety Board. Collision between a car operating with automated vehicle control systems and a tractor-semitrailer truck near Williston, Florida May 7[R]. Washington: NTSB, 2017. |
| 5 | NASSI B, MIRSKY Y, NASSI D, et al. Phantom of the ADAS: securing advanced driver-assistance systems from split-second phantom attacks[M]. Proceedings of the 2020 ACM SIGSAC Conference on Computer and Communications Security. New York, NY, USA: Association for Computing Machinery, 2020: 293-308. |
| 6 | 全国汽车标准化技术委员会,等. 预期功能安全国际标准 ISO 21448 及中国实践白皮书[R]. 北京:全国标准技术委员会, 2020. |
| National Technical Committee of Auto Standerdization, et al. Safety of the intended functionality international standard ISO 21448 and Chinese practice white paper[R]. Beijing: National Technical Committee of Auto Standardization, 2020. | |
| 7 | International Organization for Organization. ISO/PAS 21448 road vehicles: safety of the intended functionality [S]. Geneva: ISO, 2019. |
| 8 | SABERU A K, HEGGR J, FRUEHLING T, et al. Beyond SOTIF: black swans and formal methods[C]. 2020 IEEE International Systems Conference (SysCon). IEEE, 2020. |
| 9 | BECKER C, BREWER J C, YOUNT L. Safety of the intended functionality of lane-centering and lane-changing maneuvers of a generic level 3 highway chauffeur system[J]. 2020(DOT HS 812 879). |
| 10 | POST K, DAVEY C K. Integrating SOTIF and agile systems engineering: 2019-01-0141[R]. Warrendale, PA: SAE International,2019. |
| 11 | ABDULAZIM A, ELBAHAEY M, MOHAMED A. Putting safety of intended functionality SOTIF into practice[C]. SAE WCX Digital Summit, 2021. |
| 12 | 郭菲菲, 赵永飞, 付金勇, 等. 全自动泊车辅助系统的预期功能安全开发研究[C]. 2020中国汽车工程学会年会论文集, 2020: 545-551. |
| GUO F F, ZHAO Y F, FU J Y, et al. Research on SOTIF of shiftless auto parking assist system[C]. 2020 Proceedings of the Annual Meeting of China Society of Automotive Engineering, 2020: 545-551. | |
| 13 | 李波, 尚世亮, 郭梦鸽, 等. 自动驾驶预期功能安全(SOTIF)接受准则的建立[J]. 汽车技术, 2020(12). |
| LI B, SHANG S L, GUO M G, et al. Establishment of SOTIF acceptance criteria for autonomous driving[J]. Automobile Technology, 2020(12). | |
| 14 | 孙骏, 陈浩, 白先旭, 等. 一种自动驾驶车辆整车级别的性能评价方法: 202110820459[P]. 2021-10-01. |
| SUN J, CHEN H, BAI X X, et al. A performance evaluation method for autonomous driving vehicle at vehicle level: 202110820459[P]. 2021-10-01. | |
| 15 | 白先旭, 左瑜, 李维汉. 自动驾驶汽车控制系统的预期功能安全性能的量化评价方法: 202110818881[P]. 2021-10-01. |
| BAI X X, ZUO Y, LI W H. Quantitative evaluation method for the safety of the intended functionality performance of autonomous vehicle control system: 202110818881[P]. 2021-10-01. | |
| 16 | YUNHYOUNG H, SEIBUM B C. Adaptive collision avoidance using road friction information[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(1):348-361. |
| 17 | KHYYAT M, ARRIGONI S, CHELI F. Development and simulation-based testing of a 5G-Connected intersection AEB system[J]. Vehicle System Dynamics, 2021: 1-20. |
| 18 | 杨为, 赵胡屹, 舒红. 自动紧急制动系统行人避撞策略及仿真验证[J]. 重庆大学学报, 2019(2). |
| YANG W, ZHAO H Y, SHU H. Simulation and verification of the control strategies for AEB pedestrian collision avoidance system[J]. Journal of Chongqing University, 2019(2). | |
| 19 | 郭祥靖, 孙攀, 邓杰, 等. 基于BP神经网络算法预测的重型半挂汽车列车AEB控制策略研究[J]. 汽车工程, 2021, 43(9): 1350-1359. |
| GUO X J, SUN P, DENG J, et al. Research on AEB control strategy of a heavy tractor-semitrailer combination based on BP neural network algorithm prediction[J]. Automotive Engineering, 2021, 43(9): 1350-1359. | |
| 20 | KIM G, MUN H, KIM B. Performance of AEB system on a slope using an extended Kalman filter[J]. International Journal of Software Engineering and Knowledge Engineering, 2019,29(7). |
| 21 | 兰凤崇, 余蒙, 李诗成, 等. 考虑预碰撞时间的自动紧急制动系统分层控制策略研究[J]. 汽车工程, 2020, 42(2): 206-214. |
| LAN F C, YU M, LI S C, et al. Research on hierarchical control strategies for automotive emergency braking system with consideration of time-to-collision[J]. Automotive Engineering, 2020, 42(2): 206-214. | |
| 22 | 全国汽车标准化技术委员会. 乘用车自动紧急制动系统(AEBS)性能要求及试验方法:GB/T 39901—2021[S]. 北京: 中国标准出版社, 2021. |
| National Technical Committee of Auto Standardization. Performance requirements and test methods for advanced emergency braking system (AEBS) of passenger cars:GB/T 39901—2021[S]. Beijing: Standards Press of China, 2021. | |
| 23 | 刘贵如, 周鸣争, 王陆林, 等.城市工况下最小安全车距控制模型和避撞算法[J]. 汽车工程, 2016, 38(10): 1200-1205,1176. |
| LIU G R, ZHOU M Z, WANG L L, et al. Minimum safe vehicle distance control model and collision avoidance algorithm under urban conditions[J]. Automotive Engineering, 2016, 38(10): 1200-1205,1176. | |
| 24 | 蒋春文. 基于路面附着系数的AEB控制系统研究[D]. 长春:吉林大学, 2020. |
| JIANG C W. AEB control system based on road adhesion coefficient[D]. Changchun: Jilin University, 2020. | |
| 25 | 李霖, 朱西产, 董小飞, 等.自主紧急制动系统避撞策略的研究[J].汽车工程,2015, 37(2):168-174. |
| LI L, ZHU X C, DONG X F, et al. A research on the collision avoidance strategy for autonomous emergency braking system[J]. Automotive Engineering, 2015, 37(2):168-174. | |
| 26 | 李鹏辉. 中国典型驾驶场景库建设项目技术研究报告[R]. 重庆: 中国汽研, 2019. |
| LI P H. Technical research report of construction project of typical driving scene database in China[R]. Chongqing: China Automotive Engineering Research Institute Co.,Ltd., 2019. |
| [1] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [2] | 吴思宇,于文浩,邢星宇,张玉新,李楚照,李雪轲,古昕昱,李云巍,马小涵,路伟,王政,郝圳茂,王红,李骏. 基于关键场景的预期功能安全双闭环测试验证方法[J]. 汽车工程, 2023, 45(9): 1583-1607. |
| [3] | 白先旭,左瑜,李维汉,石琴,李楚照,赵树廉,陈炯. 自动紧急制动系统控制模块的SOTIF量化评价[J]. 汽车工程, 2023, 45(9): 1655-1665. |
| [4] | 左政,王云鹏,麻斌,邹博松,曹耀光,杨世春. 基于AFC-TARA的车载网络组件风险率量化评估分析[J]. 汽车工程, 2023, 45(9): 1553-1562. |
| [5] | 李达,邓钧君,张照生,刘鹏,王震坡. 电动车辆动力电池安全预警策略研究综述[J]. 汽车工程, 2023, 45(8): 1392-1407. |
| [6] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [7] | 高翔,陈龙,王歆叶,熊晓夏,李祎承,陈月霞. 基于轨迹预测的智能汽车行驶风险评估方法[J]. 汽车工程, 2023, 45(4): 588-597. |
| [8] | 韩勇,袁小宾,卢明,谈笑天. 汽车与电动两轮车碰撞典型场景下的AEB纵横向触发策略研究[J]. 汽车工程, 2023, 45(3): 501-509. |
| [9] | 洪吉超,梁峰伟,杨海旭,李克瑞. 大数据驱动动力电池智能安全管理与控制方法研究[J]. 汽车工程, 2023, 45(10): 1845-1861. |
| [10] | 王建彬,梁远情,汪爽. 制冷工况下汽车座舱新风比例智能控制策略及节能效果评价[J]. 汽车工程, 2023, 45(1): 147-156. |
| [11] | 邵文博,李骏,张玉新,王红. 智能汽车预期功能安全保障关键技术[J]. 汽车工程, 2022, 44(9): 1289-1304. |
| [12] | 赵超,卜德旭,曹礼鹏,李克强,罗禹贡. 强降雨场景下自适应巡航控制系统的安全控制策略[J]. 汽车工程, 2022, 44(8): 1117-1125. |
| [13] | 谈东奎,胡港君,朱波,金来,张捷. 考虑预期功能安全的智能汽车自动紧急制动系统[J]. 汽车工程, 2022, 44(6): 799-808. |
| [14] | 王亚雄,王轲轲,钟顺彬,何洪文,王薛超. 面向耐久性提升的车用燃料电池系统电控技术研究进展[J]. 汽车工程, 2022, 44(4): 545-559. |
| [15] | 陈浩,王红,李维汉,白先旭,陈炯,李楚照,石琴,孙骏. 基于行车安全场理论的预期功能安全场景风险评估[J]. 汽车工程, 2022, 44(11): 1636-1646. |
|