汽车工程 ›› 2021, Vol. 43 ›› Issue (7): 1105-1112.doi: 10.19562/j.chinasae.qcgc.2021.07.018
兰凤崇1,2,刘迎节1,2,陈吉清1,2( ),蓝庆生1,2
),蓝庆生1,2
Fengchong Lan1,2,Yingjie Liu1,2,Jiqin Lan Qingsheng Chen1,2()
摘要:
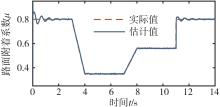
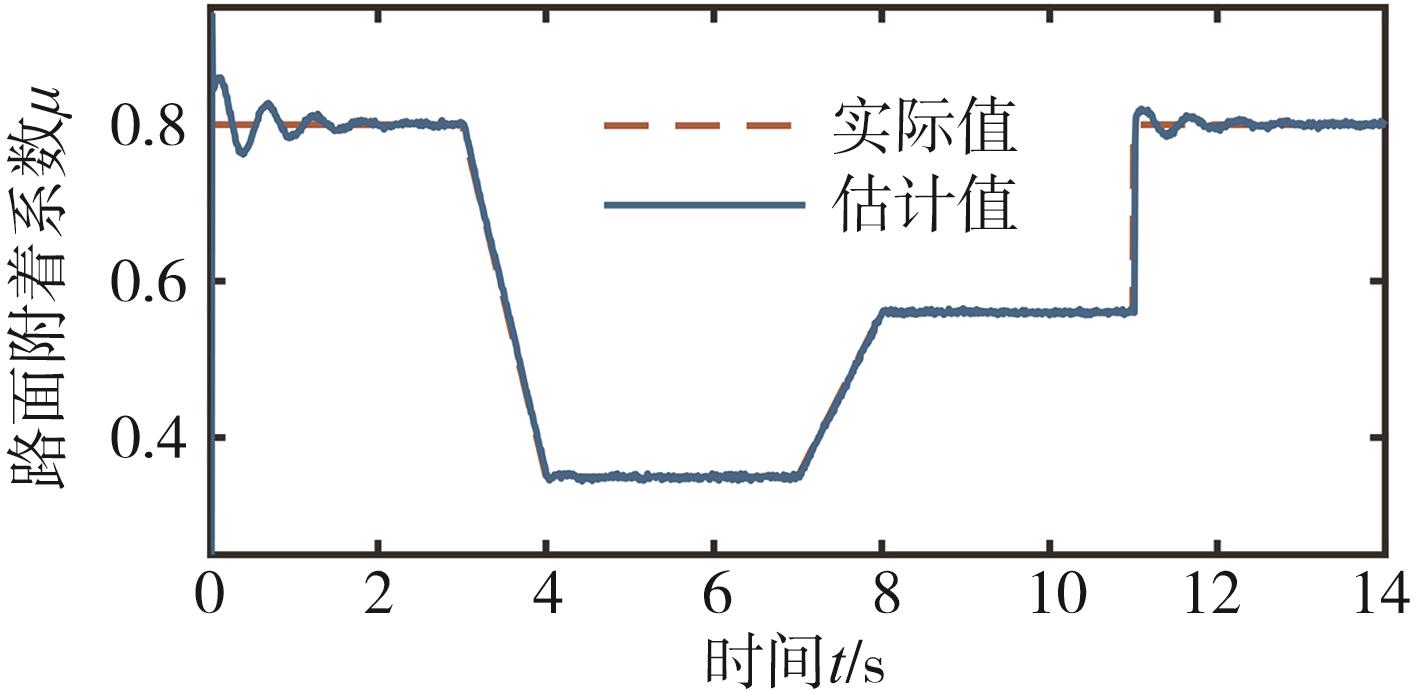
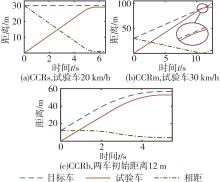
针对路面条件变化时紧急制动系统易出现的制动时机决策失准问题,提出基于车辆运动学的动态决策增强安全模型的紧急制动策略。首先,依据目标车加减速状态细化工况,基于车辆速度与加速度建立动态决策安全模型,以提高极端工况下控制策略对车辆动态行驶速度的适应性。接着,以无迹卡尔曼滤波(UKF)算法连续辨识获得道路附着系数,通过系列道路条件下对实车和模型的制动性能试验建立路况与车辆减速能力的关系,根据道路条件实时更新模型依赖的极限减速度参数,进一步增强控制策略安全性和对动态道路条件的适应性。最后,通过附着系数连续多变路面工况试验和中国新车评价规程(C?NCAP)测试工况试验,对控制策略进行验证。结果表明,滤波算法具备精准的辨识效果;而自动紧急制动策略可在变化附着系数路面上实现对制动时机的准确决断。