汽车工程 ›› 2022, Vol. 44 ›› Issue (10): 1537-1546.doi: 10.19562/j.chinasae.qcgc.2022.10.008
所属专题: 底盘&动力学&整车性能专题2022年
陈潇凯1( ),曾洺锴1,刘向2,姜安3
),曾洺锴1,刘向2,姜安3
Xiaokai Chen1(),Mingkai Zeng1,Xiang Liu2,An Jiang3
摘要:
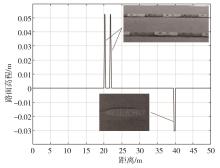
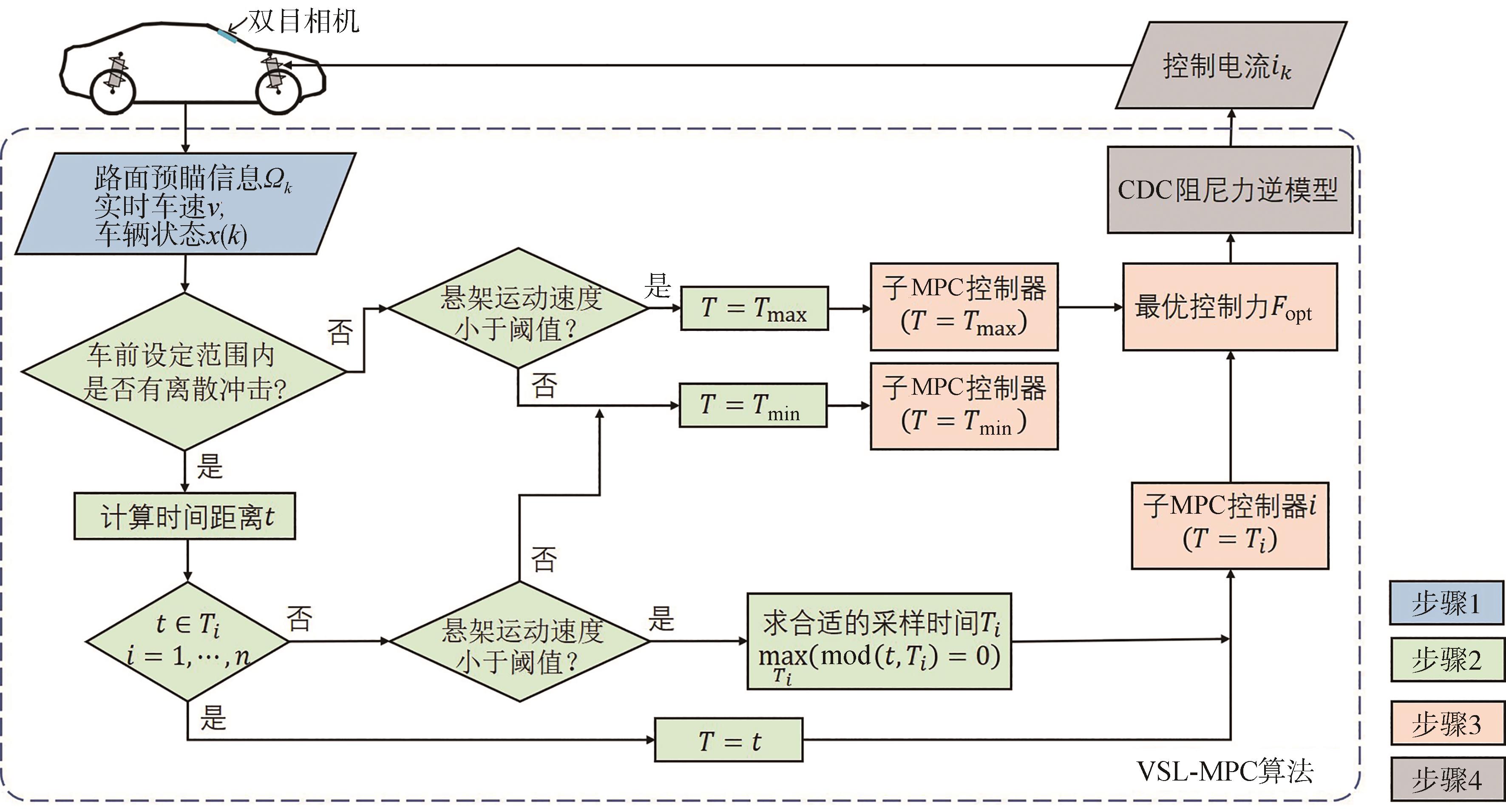
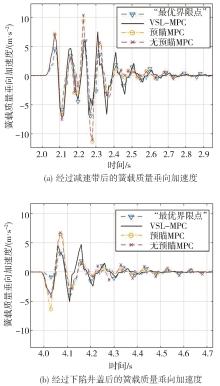
车载传感器为智能汽车提供了丰富的环境感知信息,然而,在电控悬架控制算法中,车辆所感知的路面信息尚未能被充分利用,造成车辆动力学控制效果不佳。本文以半主动悬架高性能预瞄控制问题为研究主题,提出了一种变步长模型预测控制(VSL-MPC)算法。该算法根据实时车速和双目相机采集的路面信息来确定预瞄控制步长,使得纳入控制算法中的路面感知信息能够更准确地反映路面特征,有助于半主动悬架在更恰当的时刻对悬架阻尼特性进行调节,能够实现更理想的悬架决策控制。利用双目相机对真实道路开展路面信息采集,引入半主动悬架系统最优性能界限作为性能评价基准,建立4种基于模型预测控制的半主动悬架仿真模型,仿真对比结果表明,驶过连续减速带和井盖冲击等典型城市路面特征时,所提出的VSL-MPC算法控制下的簧载质量垂向加速度与最优性能界限的差距仅为0.72和2.33 dB,相比传统预瞄MPC算法的4.31和4.46 dB、传统无预瞄MPC算法的4.04和4.74 dB具有显著提升,新算法能有效提升半主动悬架的动力学性能。