汽车工程 ›› 2023, Vol. 45 ›› Issue (1): 104-111.doi: 10.19562/j.chinasae.qcgc.2023.01.012
所属专题: 底盘&动力学&整车性能专题2023年
史培龙1( ),赵轩1,陈子童2,余强1
),赵轩1,陈子童2,余强1
收稿日期:2022-07-12
修回日期:2022-08-08
出版日期:2023-01-25
发布日期:2023-01-18
通讯作者:
史培龙
E-mail:peilongshi@chd.edu.cn
基金资助:
Peilong Shi1(),Xuan Zhao1,Zitong Chen2,Qiang Yu1
Received:2022-07-12
Revised:2022-08-08
Online:2023-01-25
Published:2023-01-18
Contact:
Peilong Shi
E-mail:peilongshi@chd.edu.cn
摘要:
针对长下坡路段行驶的重型载货汽车因驾驶人路况不熟悉而行车制动系统使用不当引发制动器热衰退风险的问题,本文提出了基于道路行驶工况辨识的重型载货汽车排气制动系统主动控制策略。考虑到山区路段道路纵向坡度信息难准确获取,且制动踏板动作特征与其他路段存在显著的差异,文中选取时间窗内制动踏板平均开度、持续作用时间和制动踏板作用时间比例分别建立了下坡路段行驶制动工况和其他路面制动工况,利用制动踏板动作与开启排气制动系统的因果关系建立了具有连续时间序列特性隐马尔可夫模型。考虑到时间窗长度对控制效果的影响,文中建立时间窗长度为30、60、90和120 s的4种模型,利用京昆高速雅安-西昌段K25-K174左线和右线试验数据进行离线训练和在线辨识验证。道路试验和仿真结果表明:文中提出的控制策略能够准确辨识车辆行驶工况,能够实现排气制动系统主动控制,降低了对驾驶人的高度依赖,从而提高了重型载货汽车下坡路段行驶安全性。
史培龙,赵轩,陈子童,余强. 基于道路行驶工况辨识的重型载货汽车排气制动系统主动控制研究[J]. 汽车工程, 2023, 45(1): 104-111.
Peilong Shi,Xuan Zhao,Zitong Chen,Qiang Yu. Study on Active Control of Exhaust Brake System for Heavy-duty Truck Based on Road Driving Condition Recognition[J]. Automotive Engineering, 2023, 45(1): 104-111.
表1
长下坡路段制动数据统计"
| 路段 | 桩号 | 制动 次数 | 制动总 时长/s | 行驶时间/s |
|---|---|---|---|---|
| 右线 | K30-K58 | 1 | 48 | 1 852 |
| K58-K73 | 35 | 478 | 893 | |
| K73-K 87 | 43 | 567.9 | 810 | |
| K87- K174 | 57 | 430 | 6 253 | |
| 左线 | K174+240-k151+810 | 81 | 2 165.4 | 1 441 |
| K148+770-K115+200 | 126 | 1 537 | 2 097 | |
| K115+200-K72 | 26 | 112 | 2 410 | |
| K72-K58 | 0 | 0 | 874 | |
| K58+810-K28+570 | 92 | 1 231 | 1 946 |
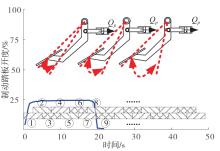
图1
时间窗分割示意图"
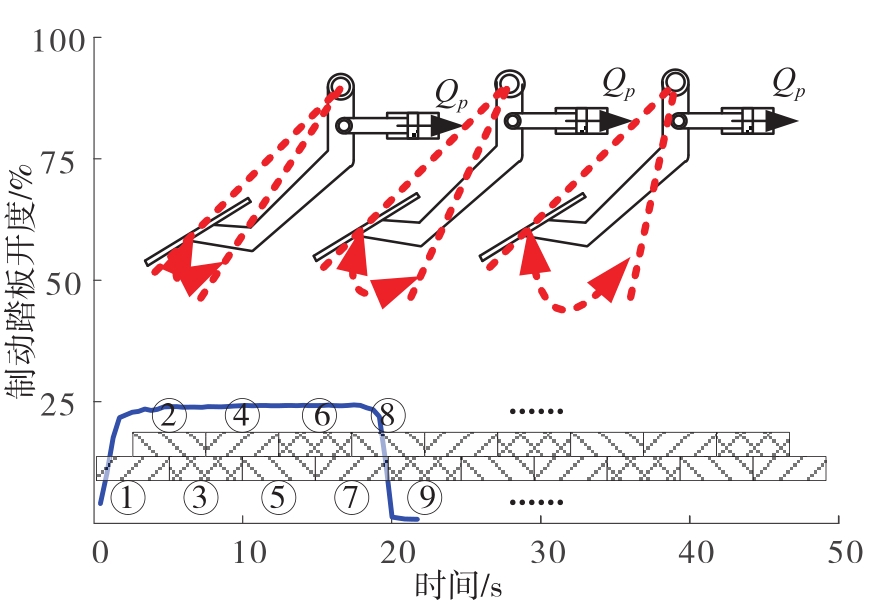

图2
不同时间窗长度训练数据"
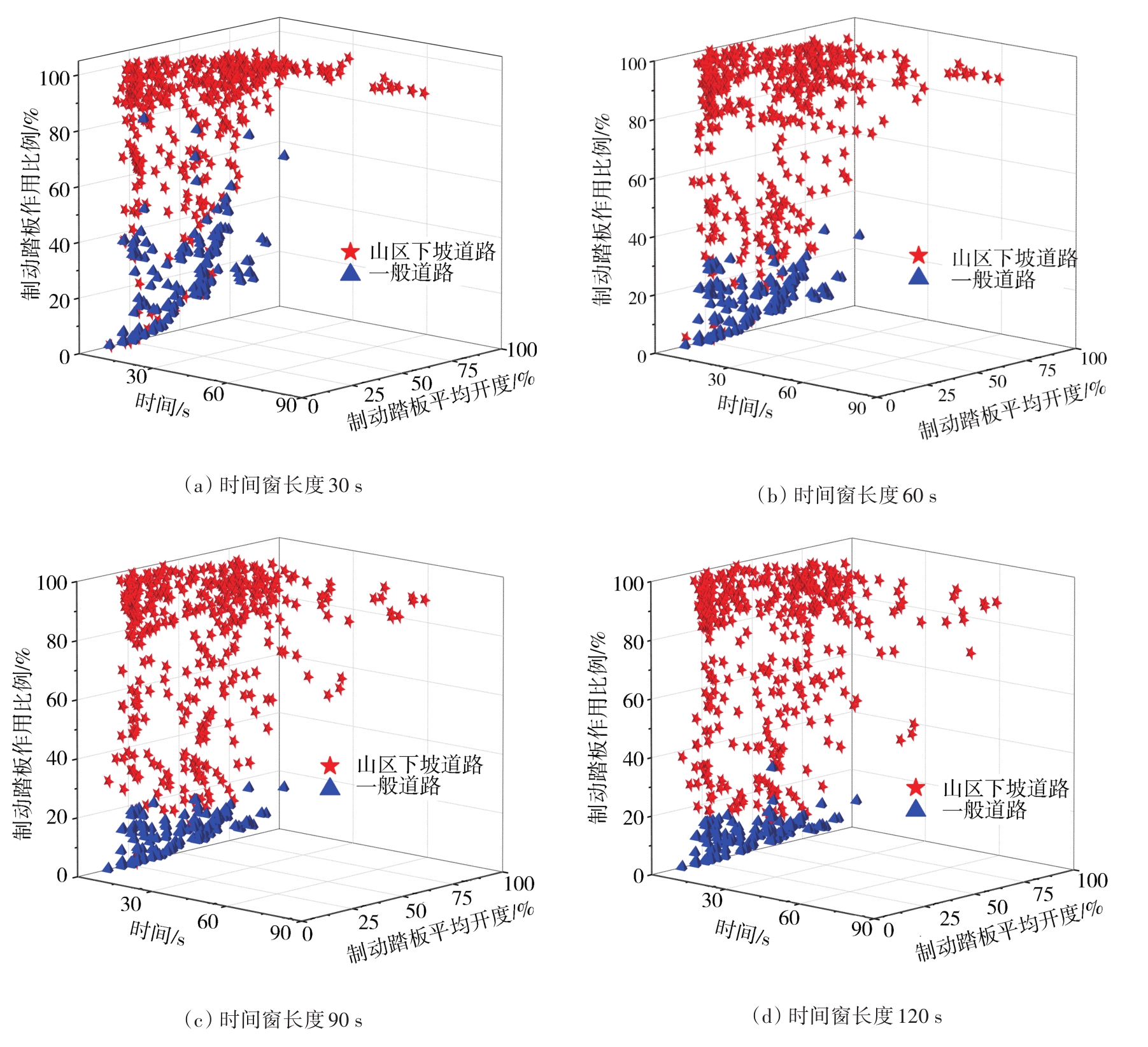
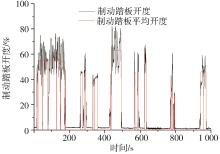
图3
行驶工况辨识验证制动踏板数据"
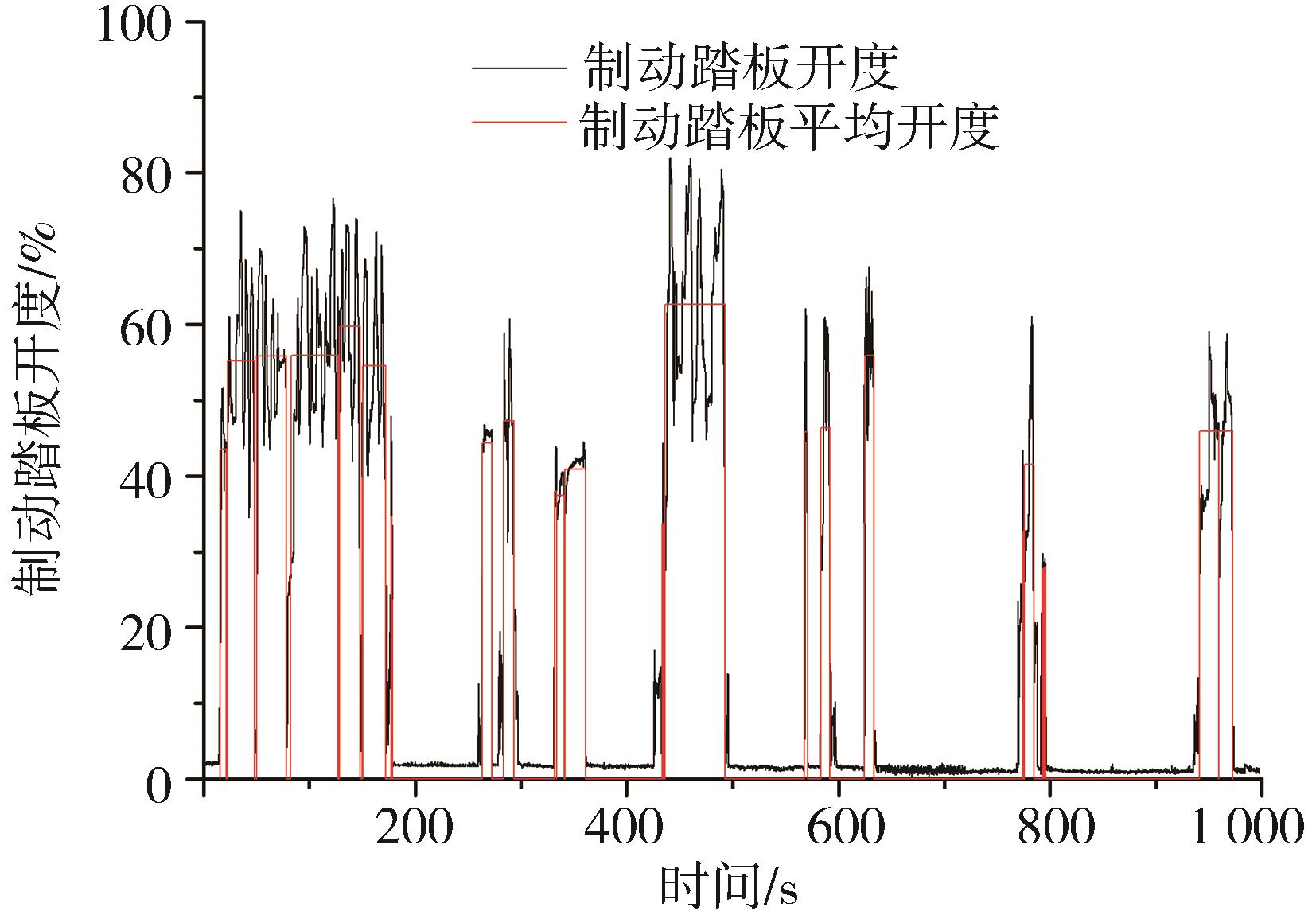

图4
不同时间窗辨识结果"
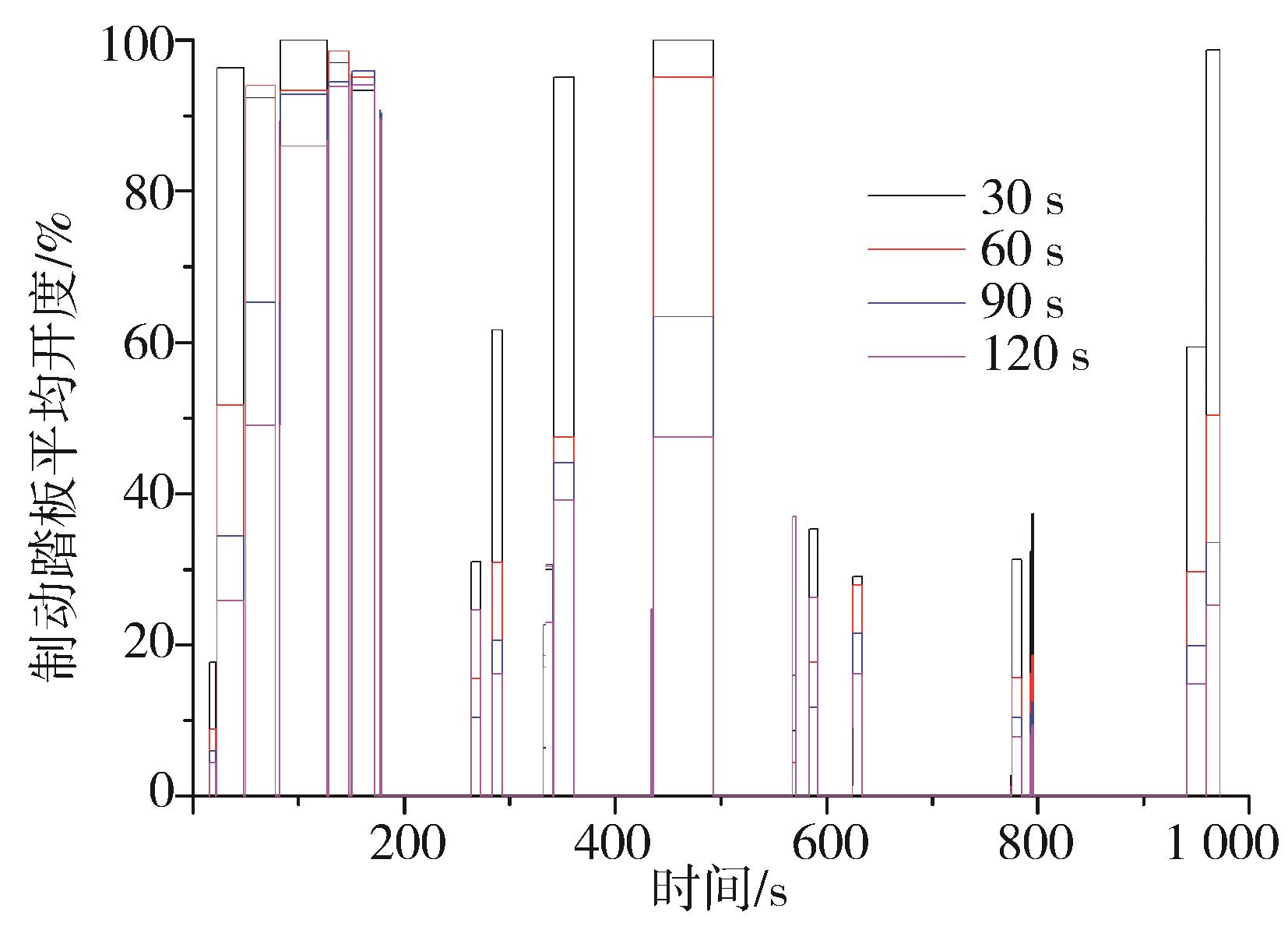
图5
行驶工况辨识结果"
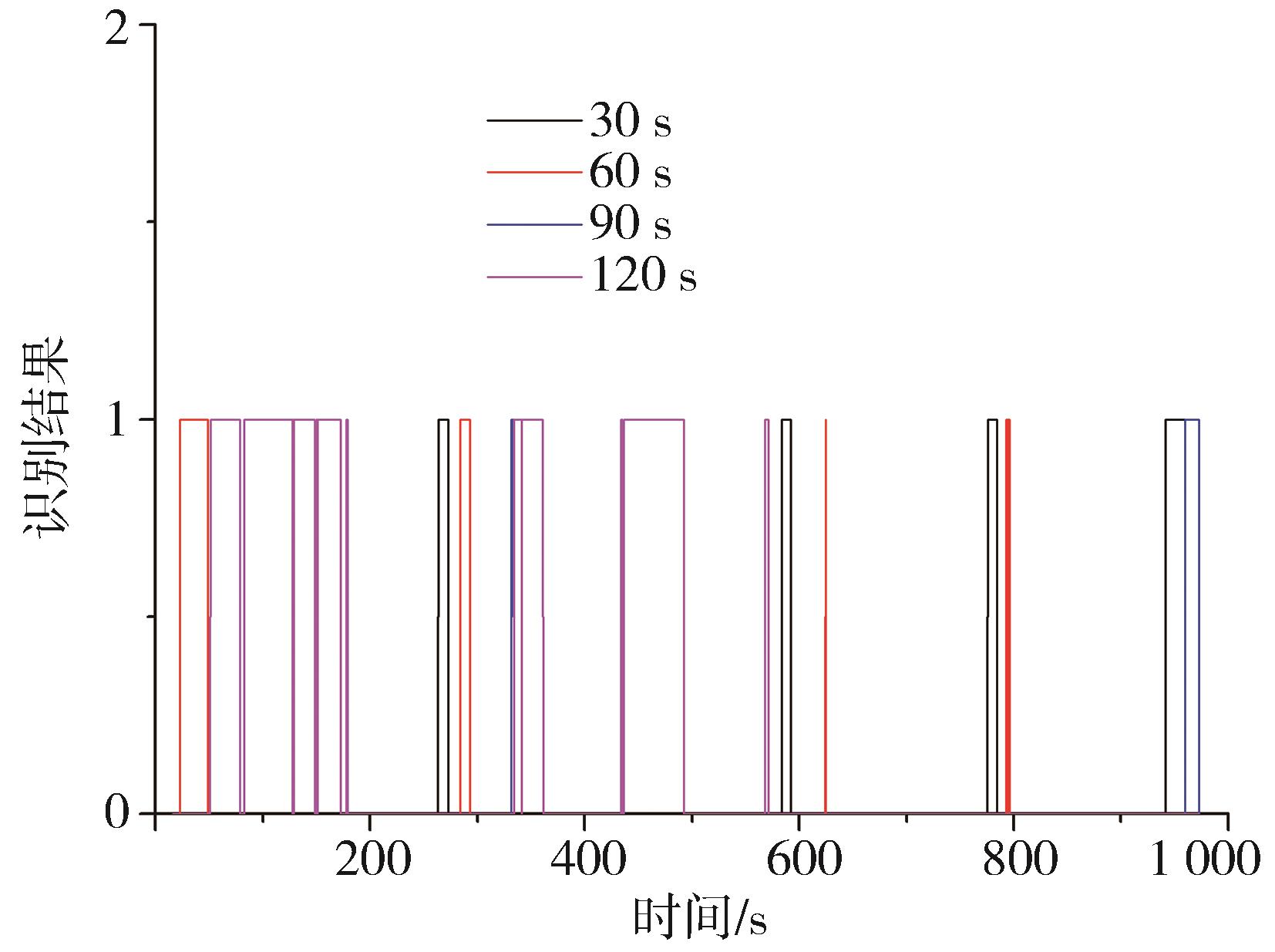
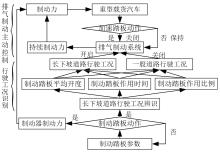
图6
长下坡制动工况持续制动控制策略"
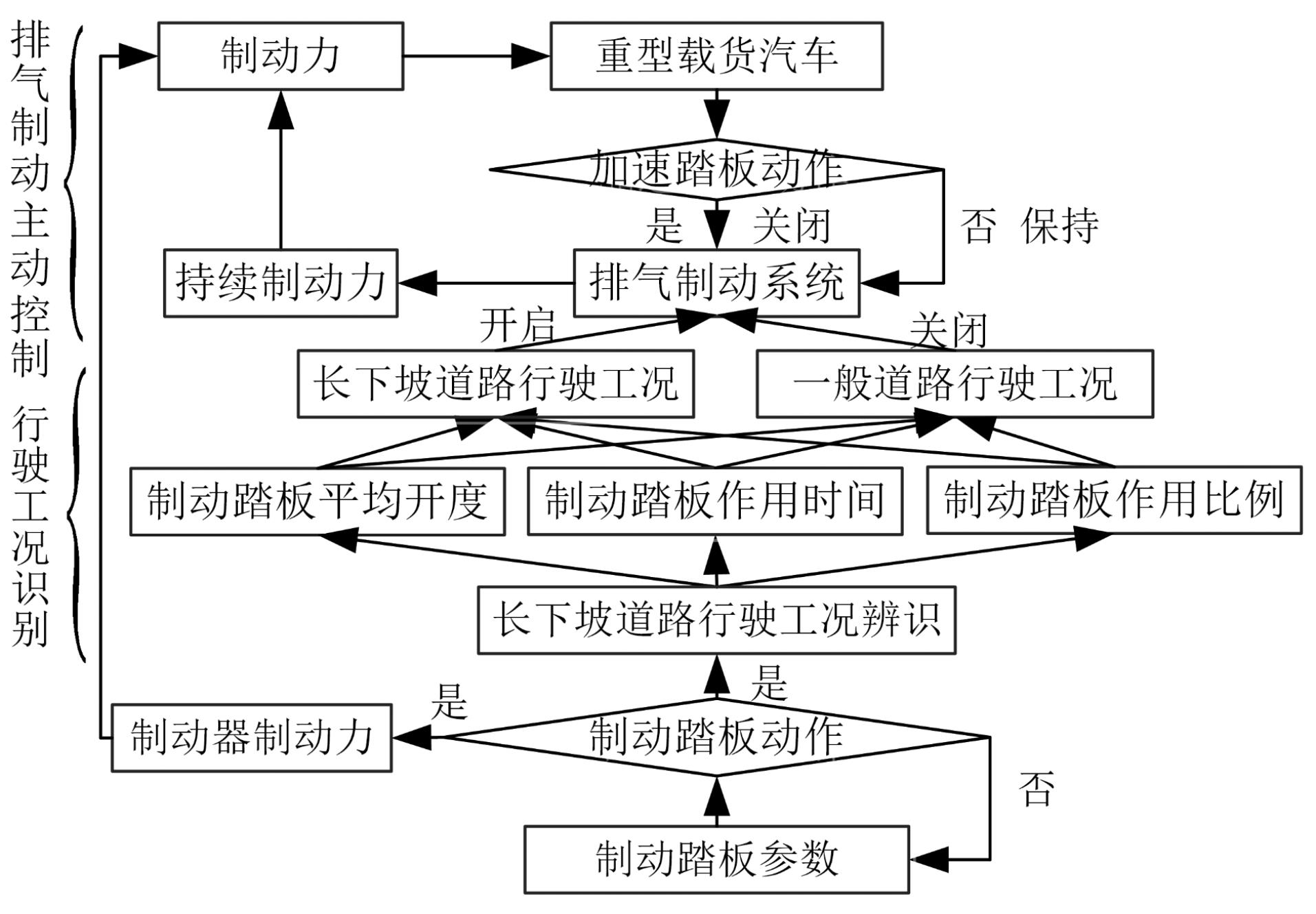

图7
发动机制动试验"
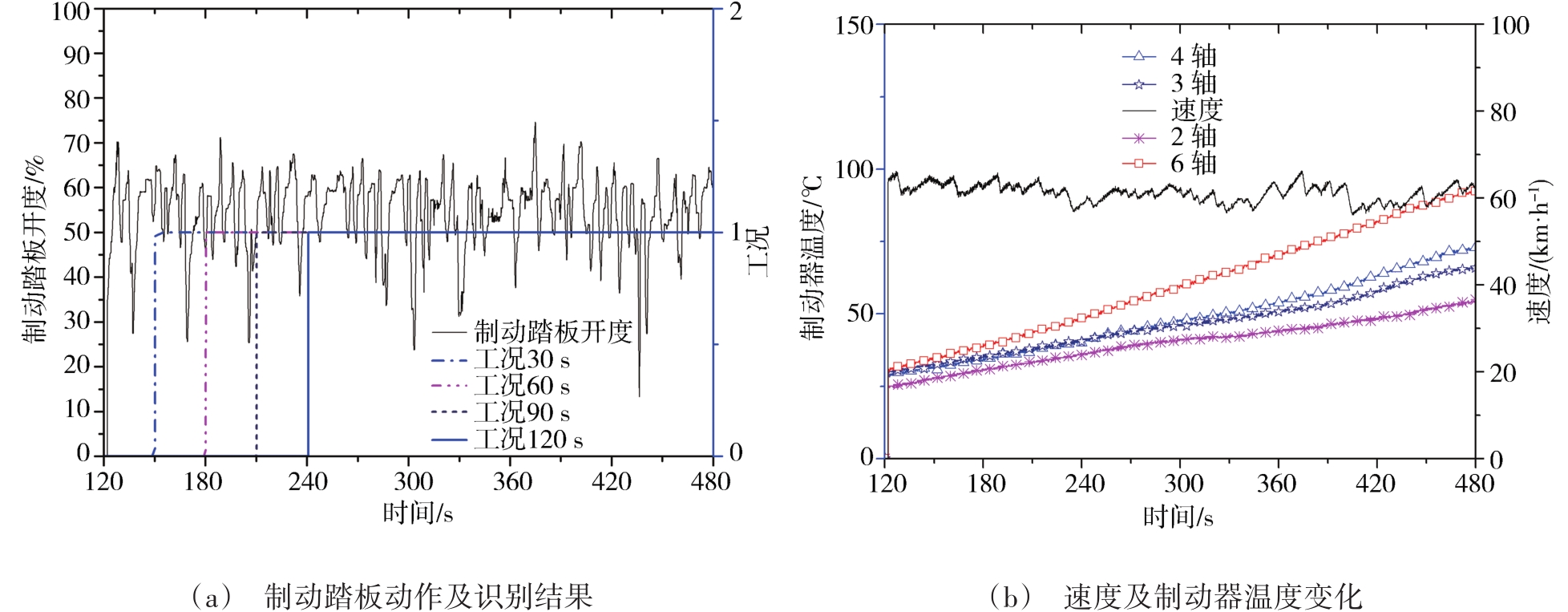

图8
排气制动试验"
表2
控制策略试验验证与仿真对比"
| 工况 | 制动器作用总时间/s | 作用次数 | 排气制动启动次数 | 温度变化/℃ | ||||
|---|---|---|---|---|---|---|---|---|
| 2轴 | 3轴 | 4轴 | 6轴 | |||||
| 发动机制动 | 360.0 | 1 | 0 | 30.39 | 36.77 | 40.63 | 62.54 | |
| 排气制动手动 | 79.0 | 15 | 1 | 17.16 | 26.41 | 20.56 | 24.12 | |
| 排气制动主动控制 | 30 s | 165.8 | 11 | 1 | 21.15 | 28.48 | 24.57 | 31.80 |
| 60 s | 199.4 | 12 | 1 | 21.50 | 26.63 | 24.87 | 31.80 | |
| 90 s | 195.2 | 11 | 1 | 21.15 | 28.48 | 24.57 | 32.38 | |
| 120 s | 226.7 | 14 | 1 | 22.94 | 29.26 | 26.29 | 35.10 | |

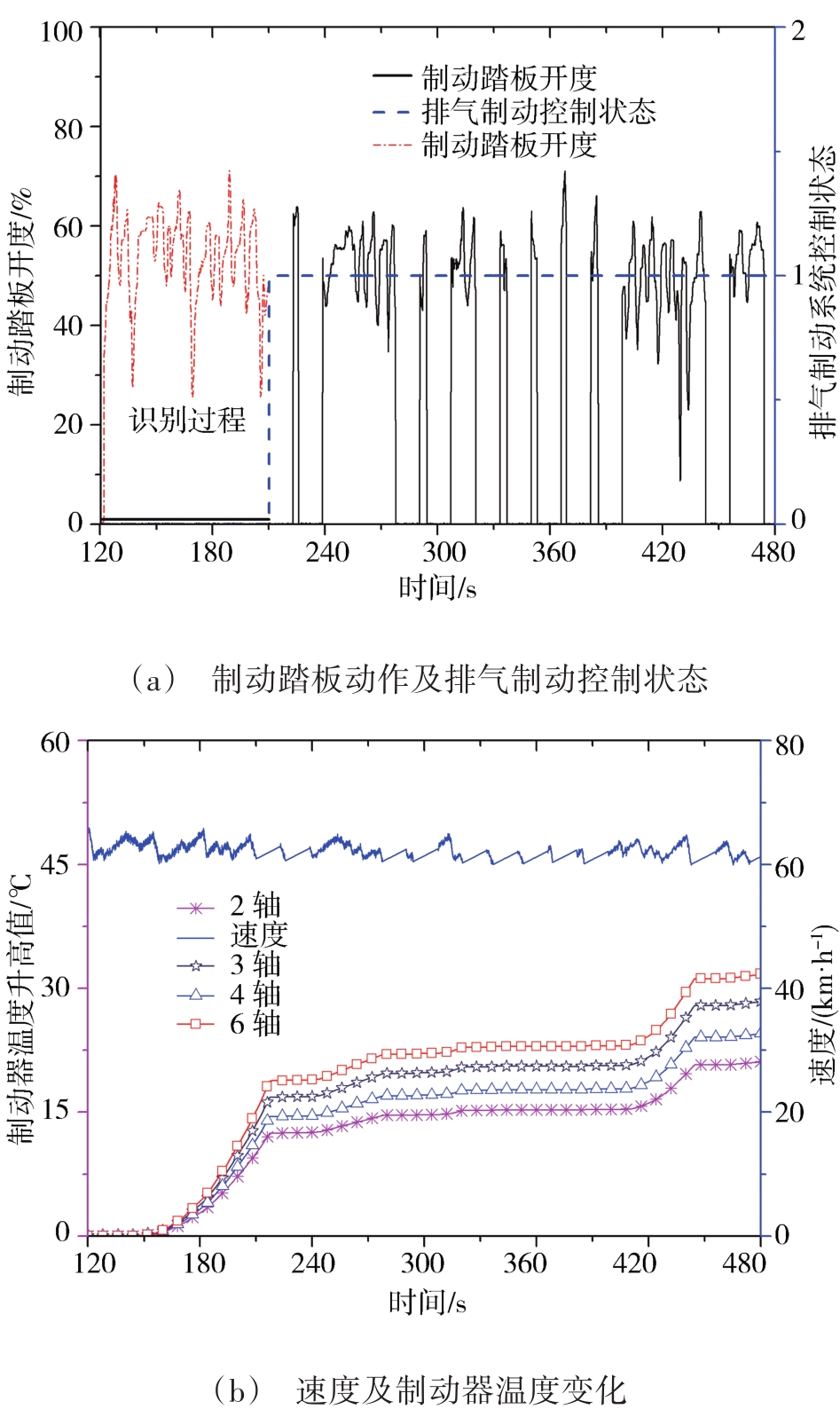
图9
主动控制系统仿真(90 s时间窗)"
| 1 | HUANG X, WANG J. Model predictive regenerative braking control for lightweight electric vehicles with in-wheel motors[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2012, 226(9): 1220-1232. |
| 2 | AHN J K, JUNG K H, KIM D H, et al. Analysis of a regenerative braking system for hybrid electric vehicles using an electro-mechanical brake[J]. International Journal of Automotive Technology, 2009, 10(2): 229-234. |
| 3 | YEO H, HWANG S, KIM H. Regenerative braking algorithm for a hybrid electric vehicle with CVT ratio control[J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2006, 220(11):1589-1600. |
| 4 | COCRON P, F BÜHLER, FRANKE T, et al. Energy recapture through deceleration - regenerative braking in electric vehicles from a user perspective[J]. Ergonomics, 2013, 56(8):1203-1215. |
| 5 | JO C, KO J, YEO H, et al. Cooperative regenerative braking control algorithm for an automatic-transmission-based hybrid electric vehicle during a downshift[J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2012, 226(4):457-467. |
| 6 | OLEKSOWICZ S A, BURNHAM K, BARBER P, et al. Investigation of regenerative and anti-lock braking interaction[J]. International Journal of Automotive Technology, 2013, 14(4):641-650. |
| 7 | KO J W, KO S Y, KIM I S, et al. Co-operative control for regenerative braking and friction braking to increase energy recovery without wheel lock[J]. International Journal of Automotive Technology, 2014, 15(2):253-262. |
| 8 | KANARACHOS S, ALIREZAEI M, JANSEN S, et al. Control allocation for regenerative braking of electric vehicles with an electric motor at the front axle using the state-dependent Riccati equation control technique[J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2014, 228(2):129-143. |
| 9 | ZHOU Z, MI C, ZHANG G. Integrated control of electromechanical braking and regenerative braking in plug–in hybrid electric vehicles[J]. International Journal of Vehicle Design, 2012, 58(2/3/4):223-239. |
| 10 | BERA T K, BHATTACHARYA K, SAMANTARAY A K. Bond graph model-based evaluation of a sliding mode controller for a combined regenerative and antilock braking system[J]. Proceedings of the Institution of Mechanical Engineers Part I: Journal of Systems and Control Engineering, 2011, 225(I7):918-934. |
| 11 | 许世维, 马建, 汪贵平, 等. 基于制动意图识别的增程式重型商用车复合制动控制策略[J]. 中国公路学报, 2017, 30(4): 144-155. |
| XU S W, MA J, WANG G P, et al. Composite braking control strategy based on braking intention recognition for range-extended heavy commercial vehicles[J]. China Journal of Highway and Transport, 2017, 30(4): 144-155. | |
| 12 | 韩云武, 罗禹贡, 李克强, 等. 混合动力汽车下坡辅助控制方法[J]. 机械工程学报, 2016, 52(6): 136-144. |
| HAN Y W, LUO Y G, LI K Q, et al. Downhill assist control method for hybrid electric vehicle[J]. Journal of Mechanical Engineering, 2016, 52(6): 136-144. | |
| 13 | 韩云武, 罗禹贡, 李克强. 基于驾驶员意图和行车安全的下坡辅助制动退出方法[J]. 汽车工程, 2015, 37(10): 1144-1149,1143. |
| HAN Y W, LUO Y G, LI K Q. A retreat scheme for downhill assist braking based on Driver’s intent and driving safety[J]. Automotive Engineering, 2015, 37(10): 1144-1149,1143. | |
| 14 | 马建, 陈荫三, 余强, 等. 基于缓速器制动的汽车停车距离控制研究[J]. 中国公路学报, 2003, 16(1): 108-112. |
| MA J, CHEN Y S, YU Q, et al. Distance control for automotive’s stopping with retarder[J]. China Journal of Highway and Transport, 2003, 16(1): 108-112. | |
| 15 | 余强, 陈荫三, 马建, 等. 客车发动机制动与缓行器联合作用的制动能力[J]. 长安大学学报(自然科学版), 2004(2): 89-92. |
| YU Q, CHEN Y S, MA J, et al. Braking ability of engine brake and retarder brake when bus downhill[J]. Journal of Chang’an University (Natural Science Edition), 2004(2): 89-92. | |
| 16 | 张焱, 刘成晔, 何仁, 等. 电涡流缓速器对汽车制动力利用率的影响[J]. 交通运输工程学报, 2011, 11(6): 62-67. |
| ZHANG Y, LIU C Y, HE R, et al. Influence of eddy current retarder on vehicle braking force utilization[J]. Journal of Traffic and Transportation Engineering, 2011, 11(6): 62-67. | |
| 17 | 赵迎生, 何仁, 王永涛. 恒速下坡汽车联合制动系统制动力的模糊分配[J]. 中国机械工程, 2008, 19(8): 1003-1007. |
| ZHAO Y S, HE R, WANG Y T. Fuzzy distribution of braking forces in united braking system of downhill automobile at constant speed[J]. China Mechanical Engineering, 2008, 19(8): 1003-1007. | |
| 18 | 赵迎生, 赵又群, 董颖. 汽车联合制动系统制动力分配的优化控制[J]. 中国机械工程, 2012, 23(2): 244-247. |
| ZHAO Y S, ZHAO Y Q, DONG Y. Optimal control of braking force distribution of united brake system of automobile[J]. China Mechanical Engineering, 2012, 23(2): 244-247. | |
| 19 | LI X L, PARIZEAU M, PLAMONDON R. Training hidden Markov models with multiple observations - a combinatorial method [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(4): 371-378. |
| 20 | 臧卓, 林辉, 杨敏华.利用PCA算法进行乔木树种高光谱数据降维与分类[J].测绘科学, 2014, 39(2): 146-149. |
| ZANG Z, LIN H, YANG M H. Dimensionality reduction and classification of arbor species hyperspectral data using PCA algorithm[J]. Science of Surveying and Mapping, 2014, 39(2): 146-149. | |
| 21 | 阎威武, 常俊林, 邵惠鹤. 基于滚动时间窗的最小二乘支持向量机回归估计方法及仿真[J]. 上海交通大学学报, 2014, 38(4): 524-533 |
| YAN W W, CHANG J L, SHAO H H. Least square SVM regression method based on sliding time window and its simulation[J]. Journal of Shanghai Jiaotong University, 2014,38(4): 524-533. | |
| 22 | 余志生. 汽车理论[M].5版. 北京: 机械工业出版社, 2012. |
| YU Z S. Automobile theory [M]. 5 th ed. Beijing: China Machine Press, 2012. | |
| 23 | SUH M W, PARK Y K, KWON S J. A simulation program for the braking characteristics of tractor-semitrailer vehicle[J]. SAE Transactions, 2000, 109(2): 540-550. |
| 24 | 史培龙, 余强, 余曼,等. 重型商用汽车长下坡制动器升温模型研究[J]. 公路交通科技, 2016, 33(1): 147-152. |
| SHI P L, YU Q, YU M, et al. Research on brake heating model for heavy duty truck on long downhill[J]. Journal of Highway and Transportation Research and Development, 2016, 33(1): 147-152. |
| [1] | 高翔, 张祥, 魏东旭, 牛军川, 贺磊. 馈能式半主动悬架振动自适应最优容错控制[J]. 汽车工程, 2024, 46(1): 92-99. |
| [2] | 傅耀宇, 周二振, 丁瑞阳, 周云波, 付条奇, 张明. 某车辆滚翻过程中乘员颈部动态响应[J]. 汽车工程, 2023, 45(7): 1276-1285. |
| [3] | 赵霞,李朝,付锐,葛振振,王畅. 基于深度卷积-Tokens降维优化视觉Transformer的分心驾驶行为实时检测[J]. 汽车工程, 2023, 45(6): 974-988. |
| [4] | 金立生,纪丙东,郭柏苍. 基于多层时空融合网络的驾驶人注意力预测[J]. 汽车工程, 2023, 45(5): 759-767. |
| [5] | 刘宁宁,孙跃东,王岩松,孙裴,郭辉. 汽车发动机噪声主动控制系统实验研究[J]. 汽车工程, 2022, 44(3): 442-448. |
| [6] | 周哲,胡钊政,王志强,肖汉彪. 基于2阶HMM的智能车视觉地图定位方法[J]. 汽车工程, 2022, 44(2): 190-198. |
| [7] | 朱冰,孙宇航,赵健,张培兴,范天昕,宋东鉴. 自动驾驶汽车测试场景基元自动提取方法[J]. 汽车工程, 2022, 44(11): 1647-1655. |
| [8] | 尤国贵,卢剑伟,苏俊收,栾铭湧,黄帅. 重型半挂牵引车行驶工况研究及其动力传动系统优化[J]. 汽车工程, 2022, 44(11): 1735-1745. |
| [9] | 张伟,刘辉,张勋,张万年,王珍,严鹏飞. 机电复合传动系统扭转振动主从控制方法[J]. 汽车工程, 2021, 43(9): 1402-1410. |
| [10] | 孙文,荣浚材,王军年,徐佳,吕斯文,刘俐丽. 带弯道信息的城市复合行驶工况构建方法研究[J]. 汽车工程, 2021, 43(10): 1519-1527. |
| [11] | 田慧欣, 李晓宇, 刘芳. 基于地图信息和循环SVR模型的纯电动汽车续驶里程预测*[J]. 汽车工程, 2020, 42(9): 1174-1182. |
| [12] | 胡远志, 朱鸿旭, 曾宪菁, 王振飞, 徐紫红, 蒋成约. 制动工况下主动卷收器参数对乘员离位位移影响的分析*[J]. 汽车工程, 2020, 42(5): 615-620. |
| [13] | 邹铁方, 王冠, 胡林, 武和全. 汽车摩托车碰撞事故中骑乘人员损伤差异对比研究*[J]. 汽车工程, 2020, 42(5): 621-627. |
| [14] | 张希玉,张立军,孟德建. 面向车内噪声控制的次级通路建模与验证[J]. 汽车工程, 2019, 41(10): 1204-1209. |
| [15] | 刘志强,吴雪刚,倪捷,张腾. 基于HMM和SVM级联算法的驾驶意图识别[J]. 汽车工程, 2018, 40(7): 858-. |
|