汽车工程 ›› 2024, Vol. 46 ›› Issue (5): 776-783.doi: 10.19562/j.chinasae.qcgc.2024.05.004
• • 上一篇
陈吉清1,2,车宇翔1,2,田小强1,2,兰凤崇1,2,周云郊1,2( )
)
Jiqing Chen1,2,Yuxiang Che1,2,Xiaoqiang Tian1,2,Fengchong Lan1,2,Yunjiao Zhou1,2()
摘要:
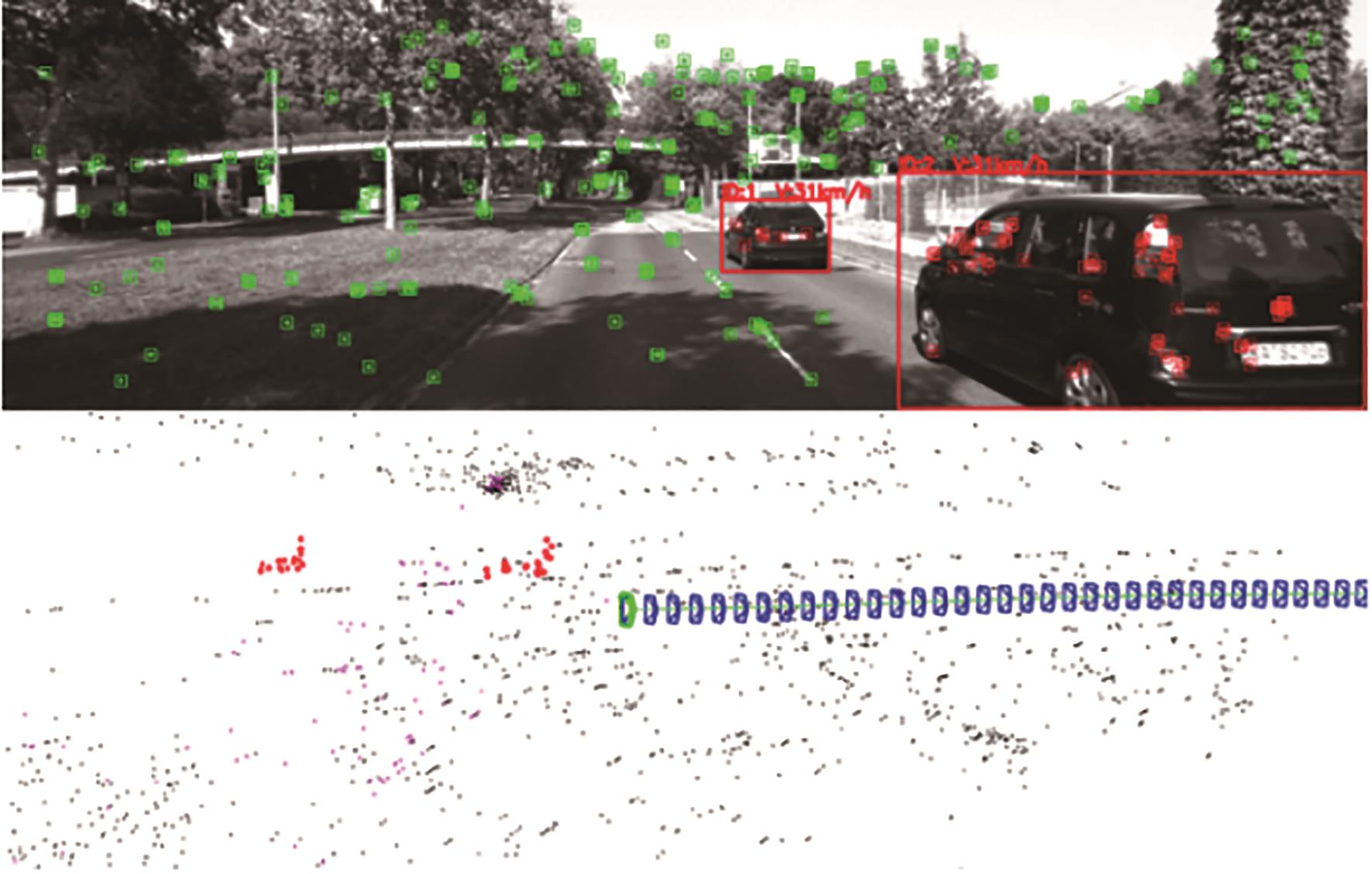
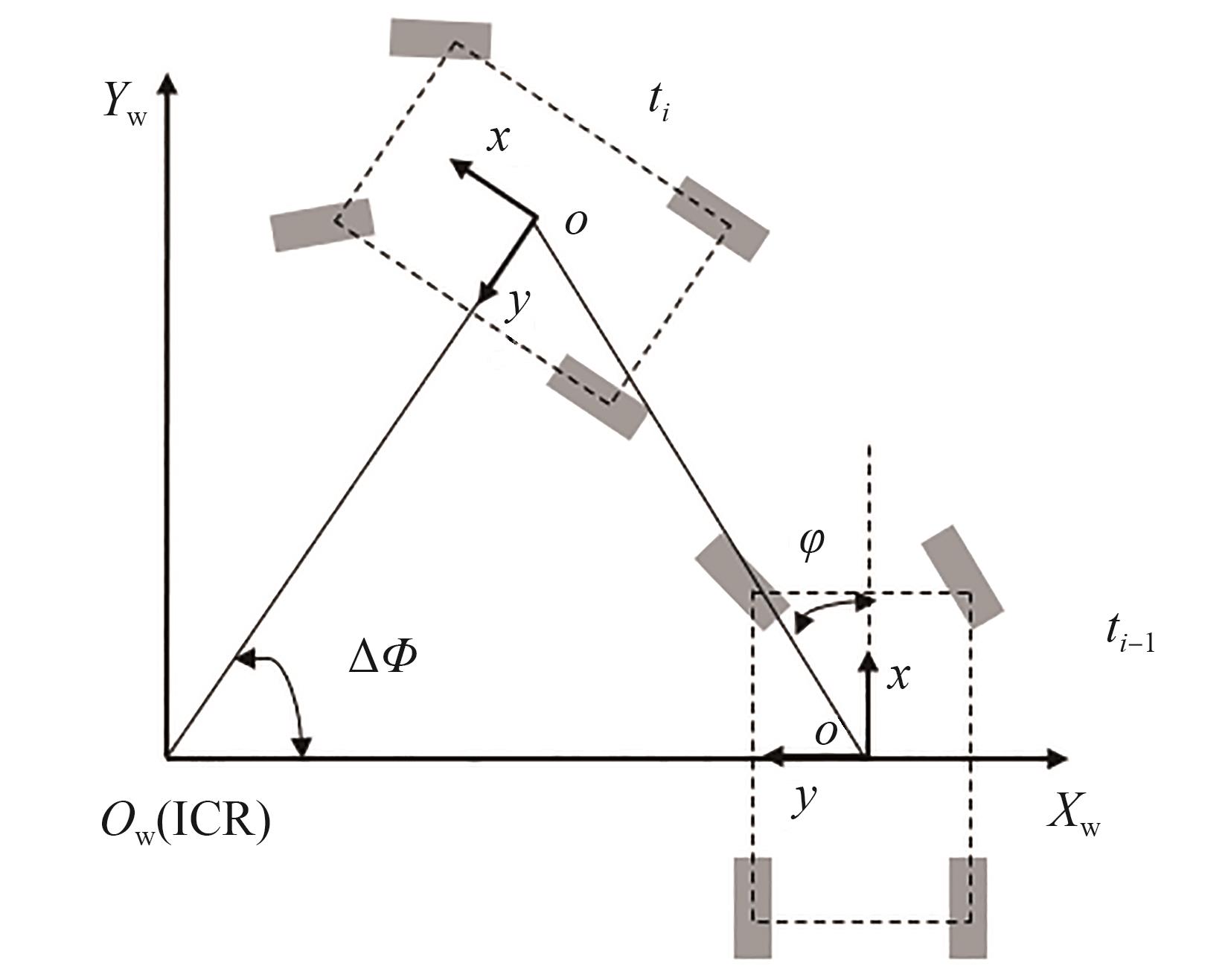
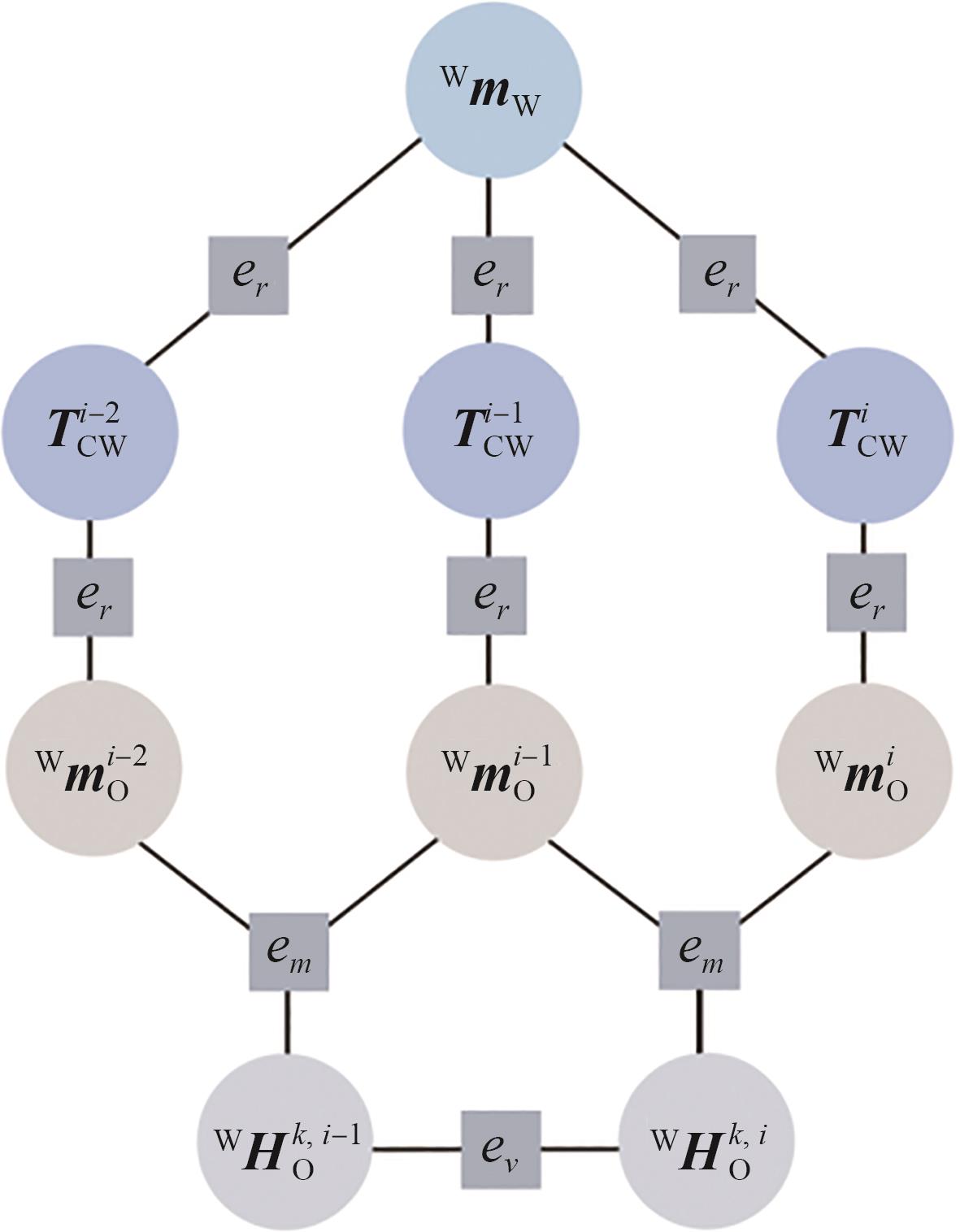
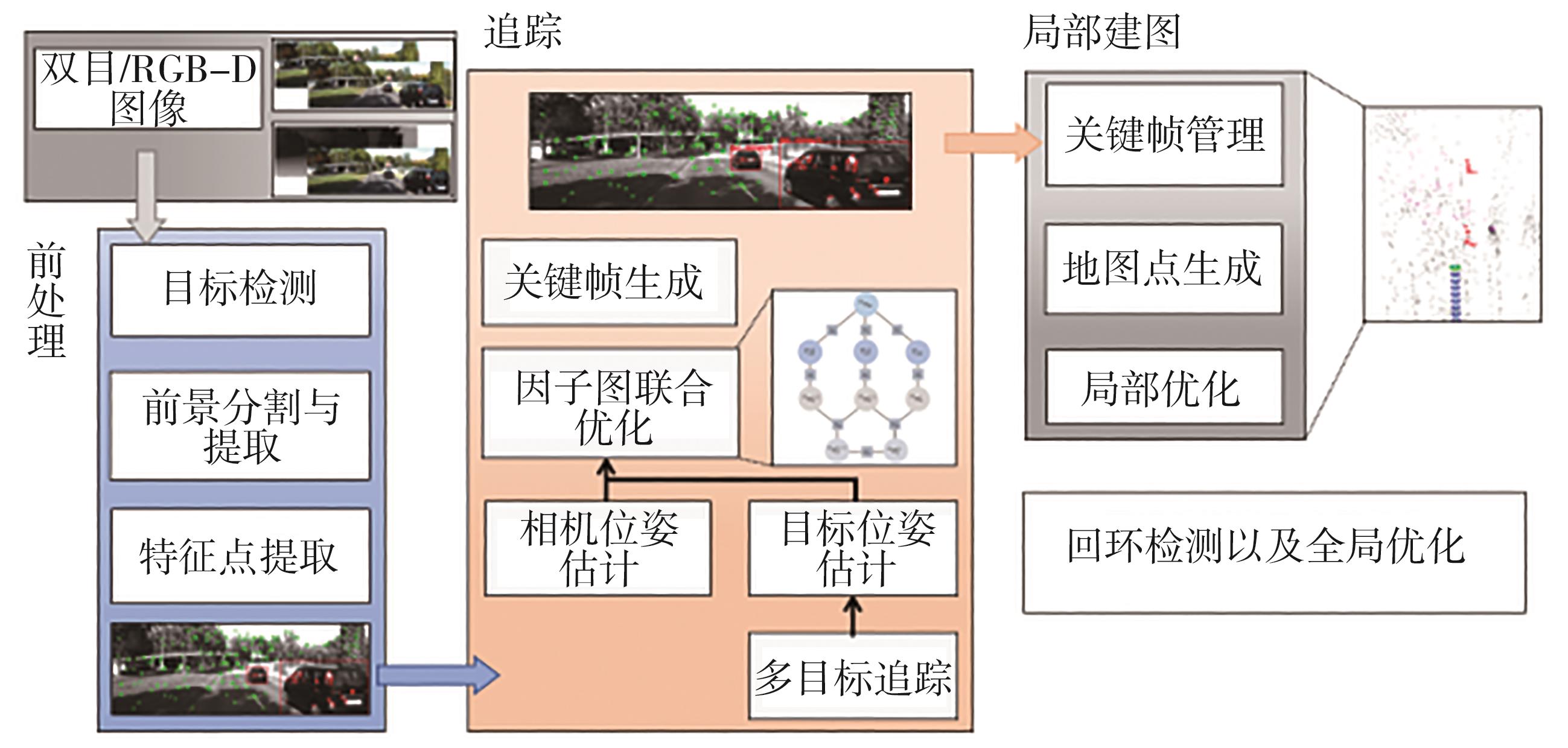
近年来一些解决动态场景下的SLAM技术被提出,其中SLAM与MOT结合的技术路线不仅可解决动态场景问题,还可以提高系统对周围场景的理解,获得了更大关注。本文介绍了一种高效的实时在线视觉SLAMMOT融合系统,以双目视觉或RGBD作为输入,只须借助2D目标检测网络,便能高效、准确、鲁棒地跟踪相机以及动态目标的位姿,并生成稀疏点云地图。为提高多动态目标追踪的精度与准确度,引入了级联匹配与IOU匹配结合的策略;利用阿克曼转向模型来简化追踪目标的运动,减少求解动态目标位姿所需匹配点的数量;利用因子图将相机与动态目标的追踪结果进行联合优化,同时提高相机、追踪目标的位姿和地图点的精度。最后在KITTI跟踪数据集上与其他方法进行比较。结果表明,在满足实时性要求的前提下,该方法仍能准确地追踪相机以及动态目标位姿。