汽车工程 ›› 2021, Vol. 43 ›› Issue (11): 1683-1692.doi: 10.19562/j.chinasae.qcgc.2021.11.014
郭柏苍1,谢宪毅1,金立生1,戎辉2( ),贺阳1,纪丙东1
),贺阳1,纪丙东1
收稿日期:2021-05-24
修回日期:2021-08-15
出版日期:2021-11-25
发布日期:2021-11-22
通讯作者:
戎辉
E-mail:ronghui@catarc.ac.cn
基金资助:
Baicang Guo1,Xianyi Xie1,Lisheng Jin1,Hui Rong2(),Yang He1,Bingdong Ji1
Received:2021-05-24
Revised:2021-08-15
Online:2021-11-25
Published:2021-11-22
Contact:
Hui Rong
E-mail:ronghui@catarc.ac.cn
摘要:
为了准确预测驾驶人的制动反应时间,建立了考虑差异化驾驶人特性的制动反应时间预测模型。以多种次任务驾驶行为作为差异化驾驶人特性的诱导因素设计了试验,在封闭的城市道路展开了实车试验并采集了制动反应时间数据,以自报式信息采集法获取了受试者的多维度驾驶特性变量数据,使用结构方程模型解构制动反应时间的影响因素并以路径系数优化BP神经网络权值,建立了基于SEM-BP神经网络的驾驶人制动反应时间预测模型。验证和测试结果表明,所提出的制动反应时间预测模型总体的回归R值大于0.9,总误差为0.032 4,有更好的预测精度和拟合性能,能够在考虑驾驶人多维度特性的同时降低网络收敛不稳定导致鲁棒性差的问题。
郭柏苍,谢宪毅,金立生,戎辉,贺阳,纪丙东. 考虑多维驾驶特性的制动反应时间预测模型[J]. 汽车工程, 2021, 43(11): 1683-1692.
Baicang Guo,Xianyi Xie,Lisheng Jin,Hui Rong,Yang He,Bingdong Ji. Braking Response Time Prediction Model Based on Multi-dimensional Driving Characteristics[J]. Automotive Engineering, 2021, 43(11): 1683-1692.
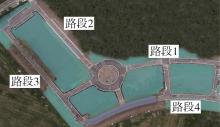
图1
实车试验场地俯视图"
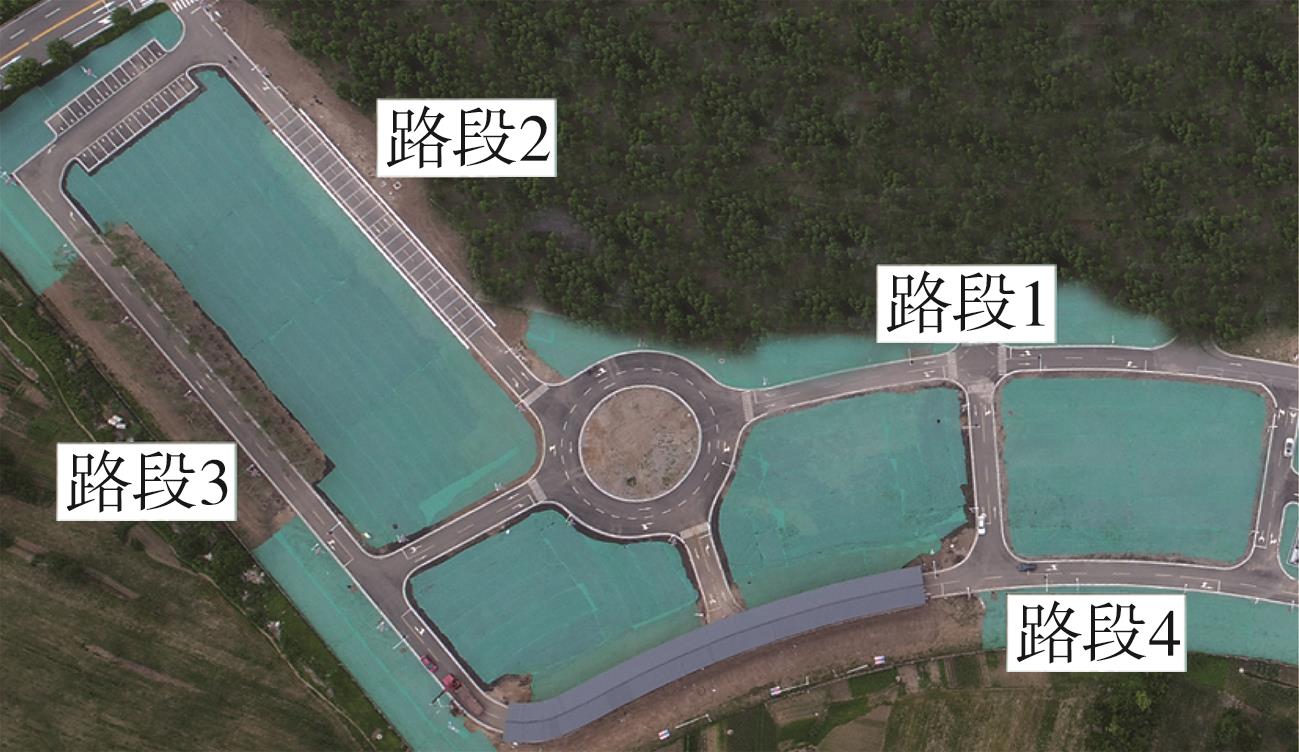

图2
实车试验平台"
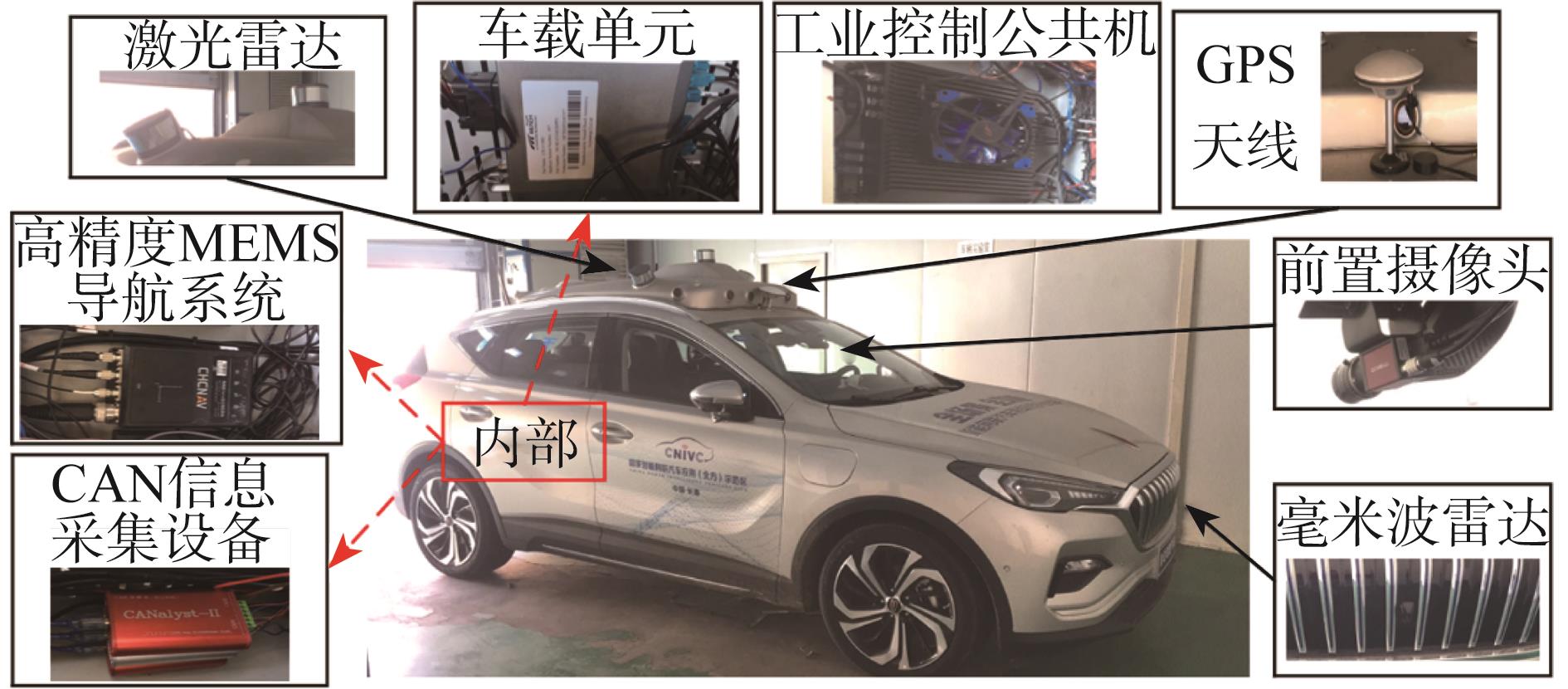

图3
试验流程图"
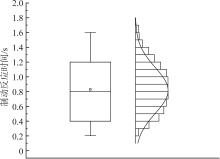
图4
制动反应时间的数据分布情况"
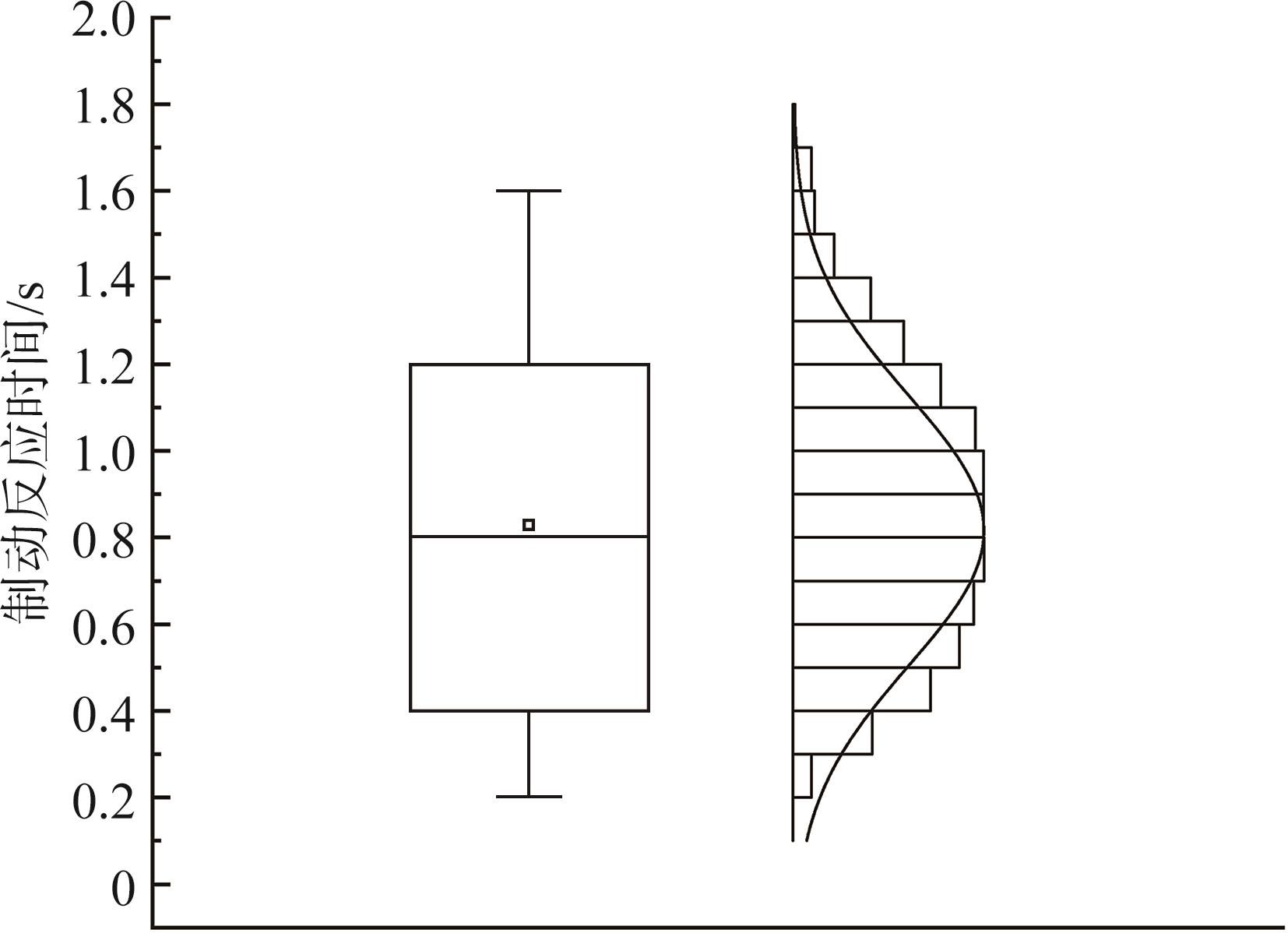
图5
制动反应时间的影响因素解构模型"
表1
制动反应时间的影响因素及其选项描述"
| 项目 | 显变量 | 选项 | 描述 | 项目 | 显变量 | 选项 | 描述 |
|---|---|---|---|---|---|---|---|
生理 属性 | 视力 | 差 不良 正常 远视 超远视 | <0.6 0.8 1.0 1.2 >1.5 | 驾驶负荷 | 行为负荷量 | 低负荷 较低负荷 中负荷 较高负荷 高负荷 | 使用文献[ |
| 年龄/岁 | 18-25 26-35 36-45 46-55 >56 | - - - - - | 心理占用量 | 专注驾驶 低风险心理类 中风险心理类 较高风险心理类 高风险心理类 | 对应于1.3节分心驾驶行为类型。 | ||
驾驶 经验 | 驾龄/年 | <1 2-5 6-10 11-20 >21 | - - - - - | 动作占用量 | 专注驾驶 低风险动作类 中风险动作类 较高风险动作类 高风险动作类 | 使用文献[ | |
| 驾驶里程/万km | 低 较低 中 较高 高 | <0.5 0.5-1 1-3 3-5 >5 | 期望 | 速度期望 | 低于周车速度 略低于周车速度 临近周车速度 略高于周车速度 高于周车速度 | 使用文献[ | |
| 月驾驶天数 | <5 6-10 11-15 16-20 >21 | - - - - - | 跟车距离期望 | 远距离跟车 较远距离跟车 中距离跟车 较近距离跟车 近距离跟车 | 设定方案参照文献[ | ||
| 舒适性期望 | 舒适型 较舒适型 普通型 较不舒适 不舒适 | 设定方案参照文献[ | |||||
表2
KMO和Bartlett检验"
| KMO取样适切性量数 | 0.919 | |
|---|---|---|
| Bartlett球形度检验 | 近似卡方 | 2 757.181 |
| 自由度 | 91 | |
| 显著性 | 0 | |
表3
正态性检验结果"
| 变量 | Skewness | C.R. | Kurtosis | C.R. |
|---|---|---|---|---|
| 制动反应时间(1) | -0.782 | -6.505 | -0.348 | -1.447 |
| 制动反应时间(2) | -0.716 | -5.957 | -0.510 | -2.122 |
| 制动反应时间(3) | -0.665 | -5.531 | -0.640 | -2.662 |
| 驾龄 | -0.796 | -6.621 | -0.346 | -1.437 |
| 驾驶里程 | -0.958 | -7.968 | -0.182 | -0.755 |
| 驾驶频率 | -0.880 | -7.318 | -0.273 | -1.135 |
| 视力 | -0.790 | -6.569 | -0.468 | -1.947 |
| 年龄 | -0.833 | -6.926 | -0.319 | -1.327 |
| 速度期望 | -0.638 | -5.310 | -0.821 | -3.416 |
| 跟车距离期望 | -0.635 | -5.284 | -0.691 | -2.872 |
| 舒适性期望 | -0.839 | -6.981 | -0.318 | -1.322 |
| 行为负荷量 | -0.790 | -6.572 | -0.333 | -1.385 |
| 心理占用量 | -0.946 | -7.866 | -0.121 | -0.504 |
| 动作占用量 | -0.794 | -6.605 | -0.321 | -1.335 |
| 多元方差 | 30.306 | 14.584 |

图6
基于SEM的模型构建方案"
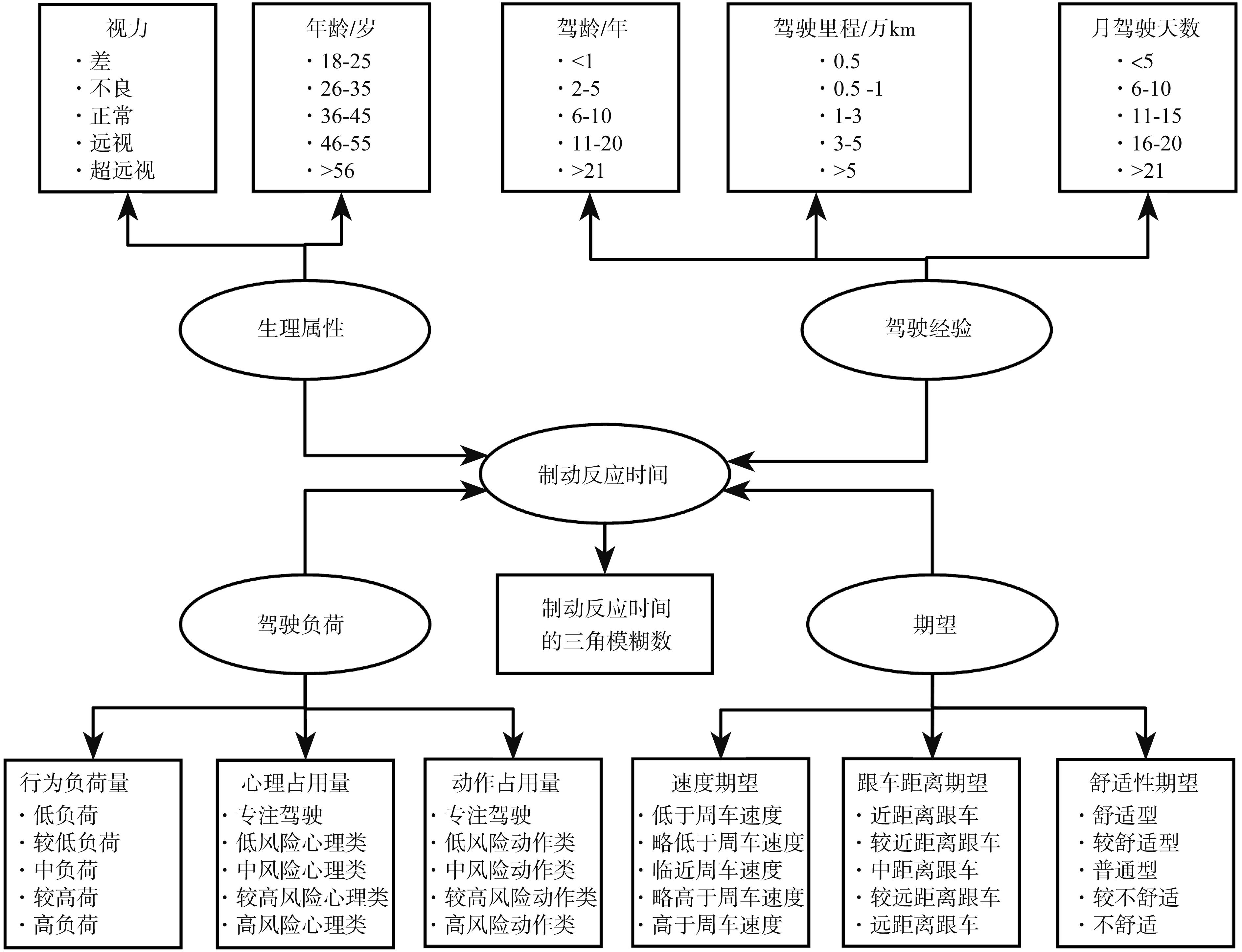

图7
基于SEM的模型计算结果"
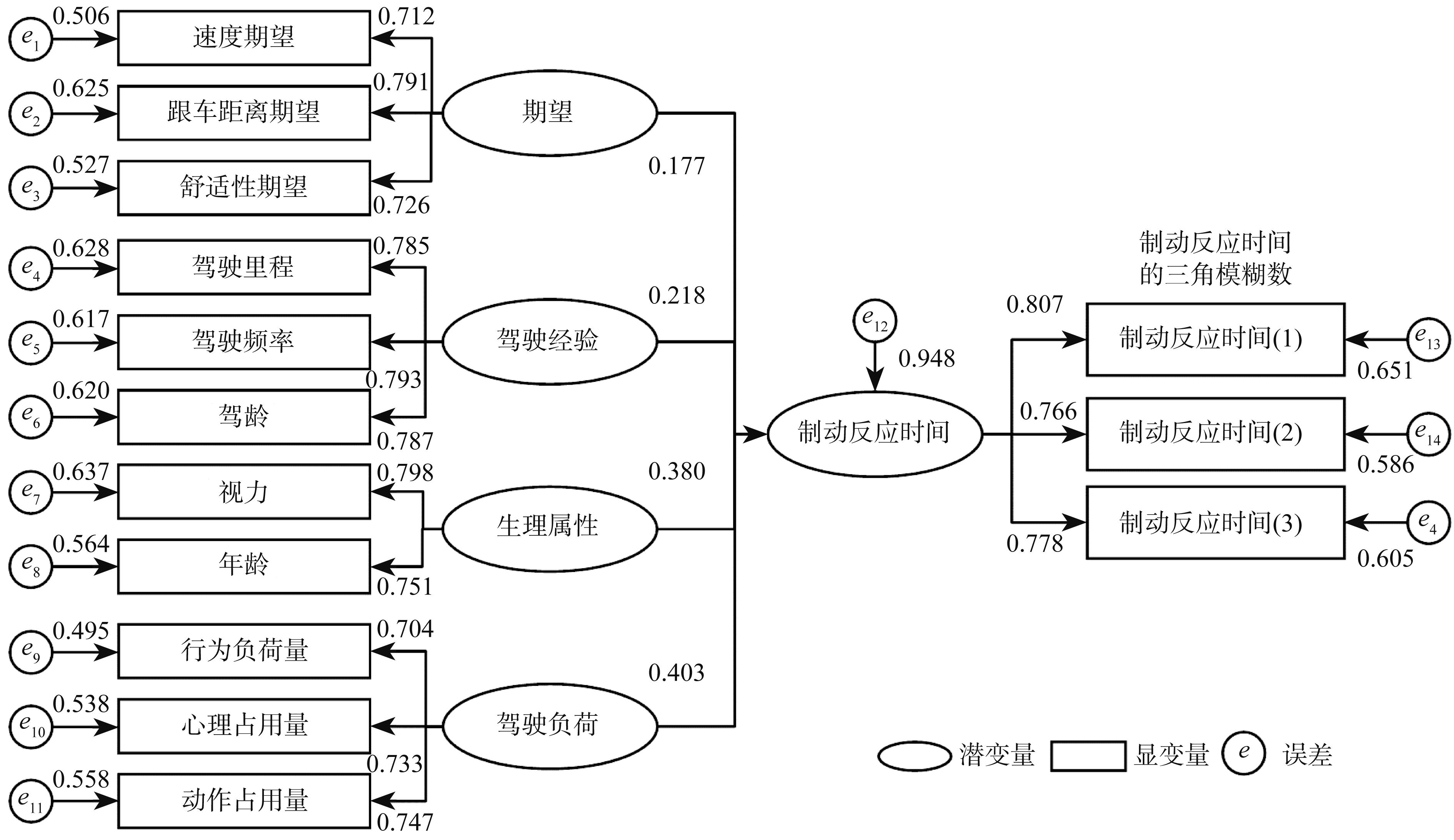
表4
模型的评价指标"
| 拟合指数 | 合理标准 | 优秀标准 | 模型值 | 参数判断 | 是否达标 |
|---|---|---|---|---|---|
| CMIN | 98.249 | ||||
| CMIN/DF | <5 | <3 | 1.445 | 优秀 | 是 |
| GFI | >0.8 | >0.9 | 0.967 | 优秀 | 是 |
| AGFI | >0.8 | >0.9 | 0.948 | 优秀 | 是 |
| NFI | >0.8 | >0.9 | 0.965 | 优秀 | 是 |
| IFI | >0.8 | >0.9 | 0.989 | 优秀 | 是 |
| TLI | >0.8 | >0.9 | 0.985 | 优秀 | 是 |
| CFI | >0.8 | <0.9 | 0.989 | 优秀 | 是 |
| RMSEA | <0.08 | <0.05 | 0.033 | 优秀 | 是 |
表5
变量的显著路径系数"
| 路径 | 非标准参数 | S.E. | 标准参数 | C.R. | P |
|---|---|---|---|---|---|
| 驾驶负荷→制动反应时间 | 0.432 | 0.082 | 0.403 | 5.287 | *** |
| 驾驶经验→制动反应时间 | 0.221 | 0.057 | 0.218 | 3.879 | *** |
| 期望→制动反应时间 | 0.174 | 0.051 | 0.177 | 3.39 | *** |
| 生理属性→制动反应时间 | 0.408 | 0.073 | 0.380 | 5.552 | *** |
| 驾驶负荷→行为负荷量 | 0.936 | 0.072 | 0.704 | 13.030 | *** |
| 驾驶负荷→动作占用量 | 0.978 | 0.071 | 0.747 | 13.755 | *** |
| 期望→舒适性期望 | 0.905 | 0.068 | 0.726 | 13.345 | *** |
| 期望→速度期望 | 0.940 | 0.072 | 0.712 | 13.139 | *** |
| 驾驶经验→驾龄 | 0.990 | 0.063 | 0.787 | 15.692 | *** |
| 驾驶经验→驾驶里程 | 1.032 | 0.066 | 0.785 | 15.658 | *** |
| 生理属性→视力 | 1.114 | 0.081 | 0.798 | 13.769 | *** |
| 生理属性→年龄 | 1.000 | - | 0.751 | - | - |
| 驾驶负荷→心理占用量 | 1.000 | - | 0.733 | - | - |
| 期望→跟车距离期望 | 1.000 | - | 0.791 | - | - |
| 驾驶经验→驾驶频率 | 1.000 | - | 0.793 | - | - |
制动反应时间→ 制动反应时间(1) | 1.020 | 0.058 | 0.807 | 17.575 | *** |
制动反应时间→ 制动反应时间(2) | 0.987 | 0.060 | 0.766 | 16.502 | *** |
制动反应时间→ 制动反应时间(3) | 1.000 | - | 0.778 | - | - |

图8
网络结构设计"
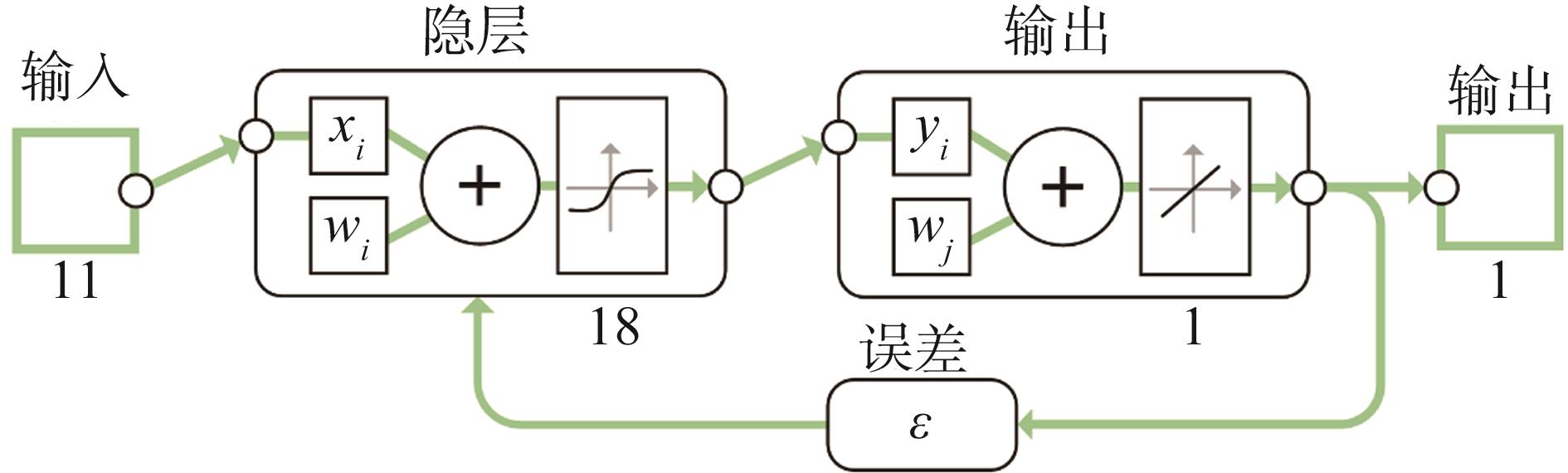
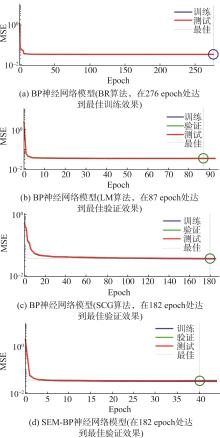
图9
网络模型训练过程的MSE走势"
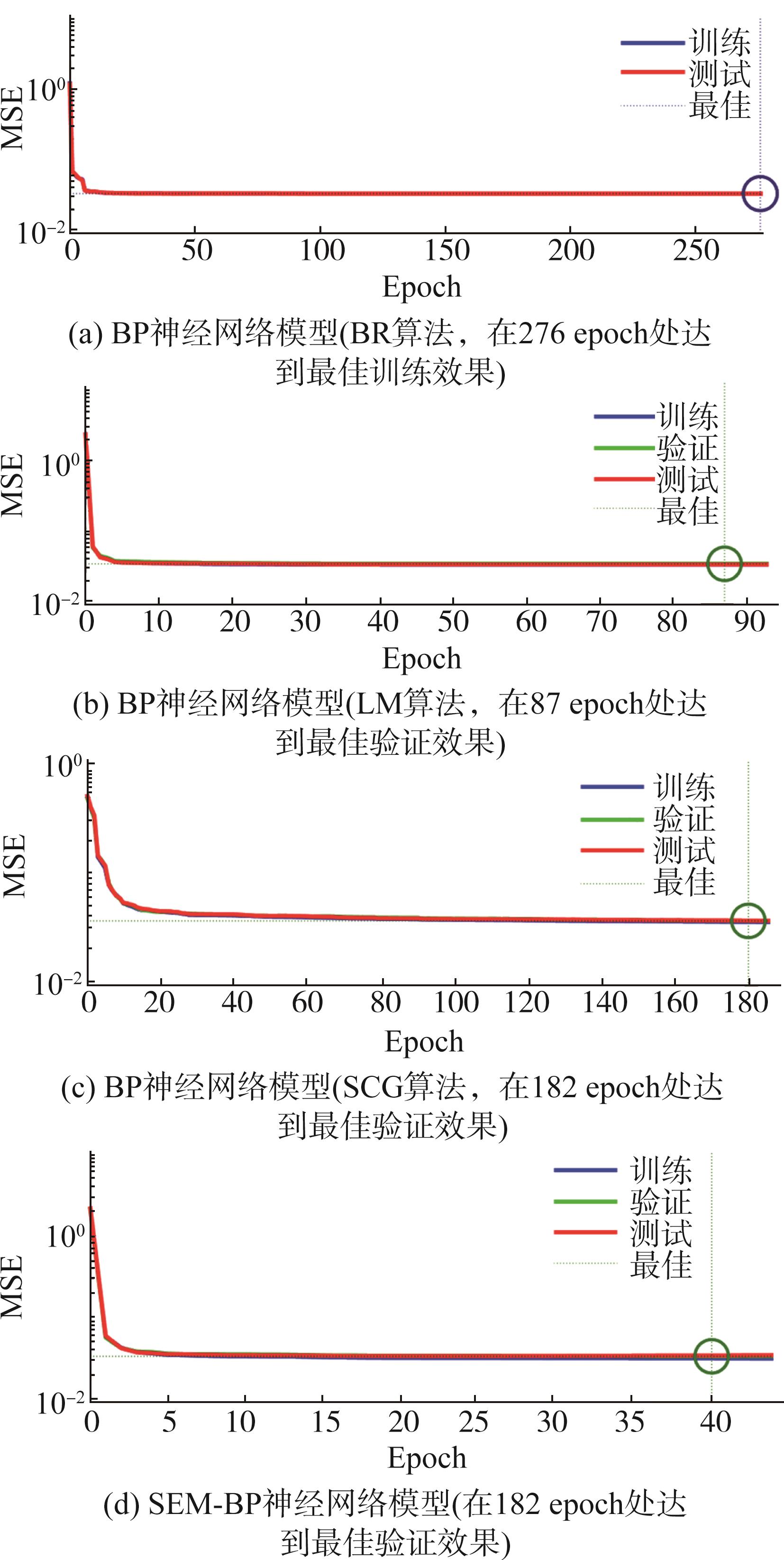
表6
网络模型的拟合效果"
| 预测模型及其训练算法 | 回归R值 | |||
|---|---|---|---|---|
| 训练集 | 验证集 | 测试集 | 总体 | |
| BP神经网络预测模型(BR) | 0.815 15 | 0.800 62 | 0.813 03 | |
| BP神经网络预测模型(LM) | 0.812 18 | 0.802 88 | 0.810 31 | 0.810 50 |
| BP神经网络预测模型(SCG) | 0.785 32 | 0.780 63 | 0.779 80 | 0.783 75 |
| SEM-BP神经网络预测模型 | 0.917 22 | 0.907 94 | 0.913 96 | 0.915 29 |
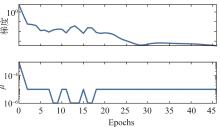
图10
SEM-BP神经网络模型的训练梯度和阻尼因子"
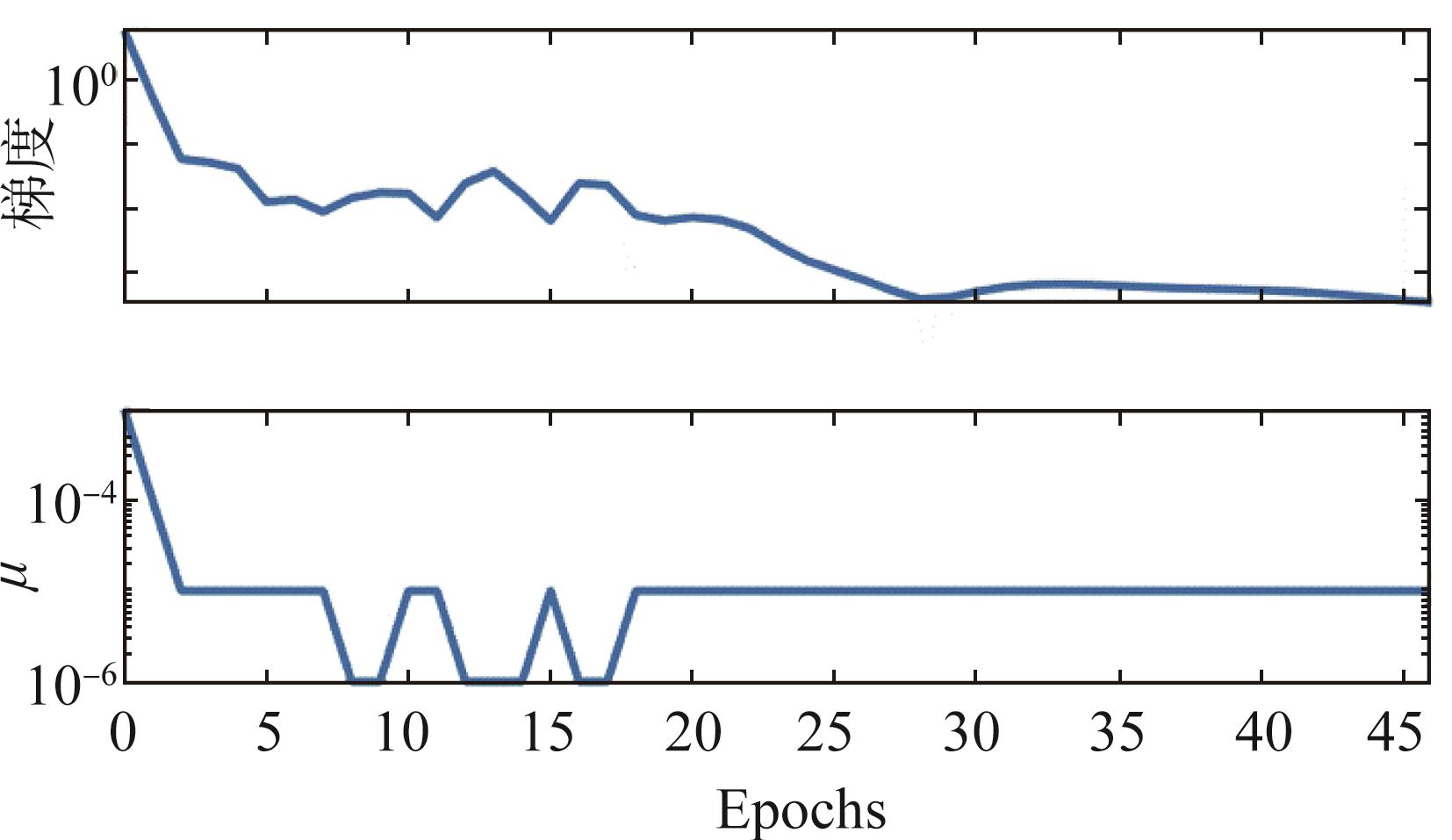
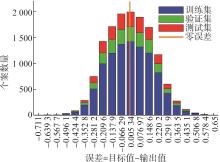
图11
误差直方图"
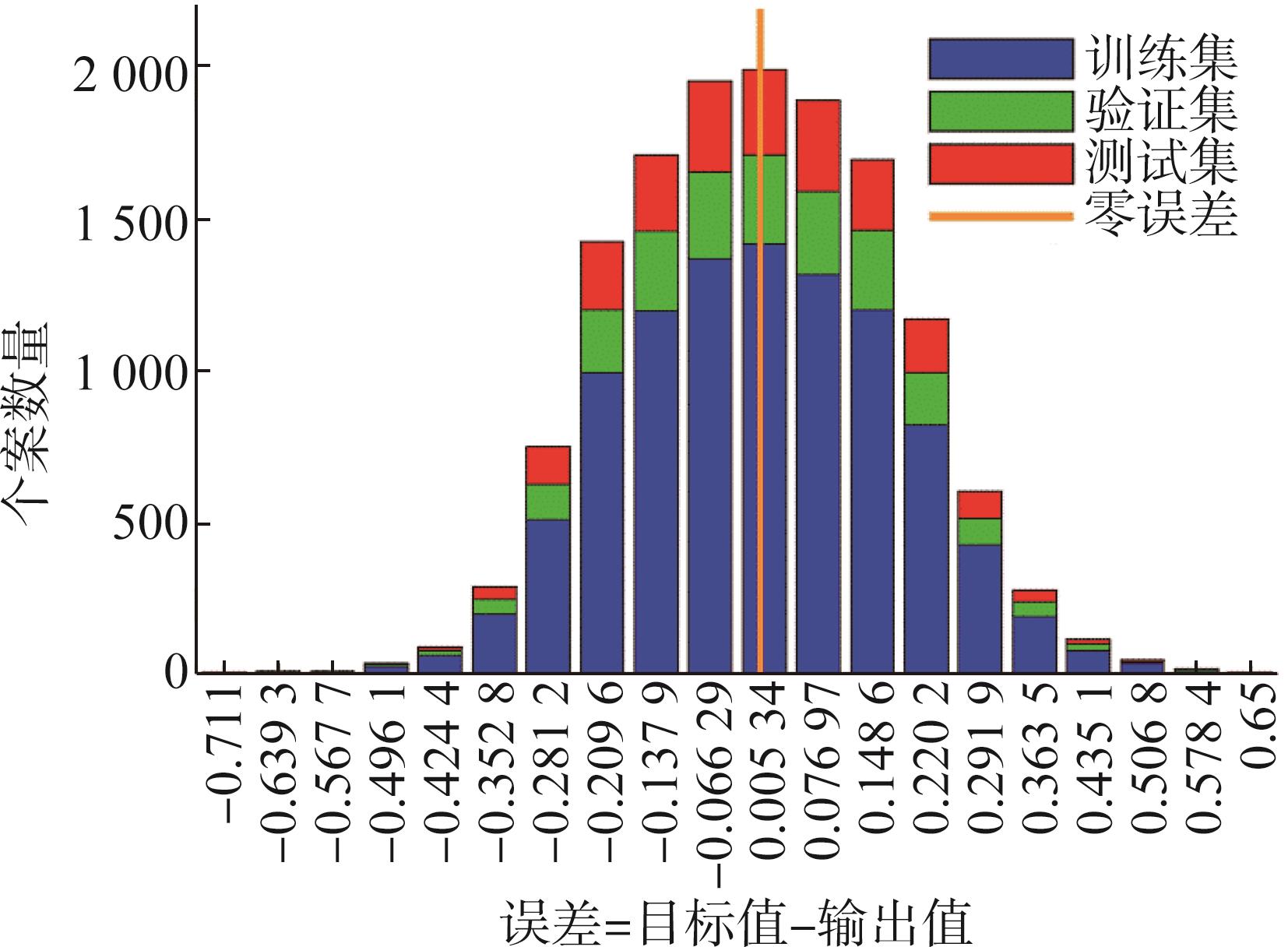
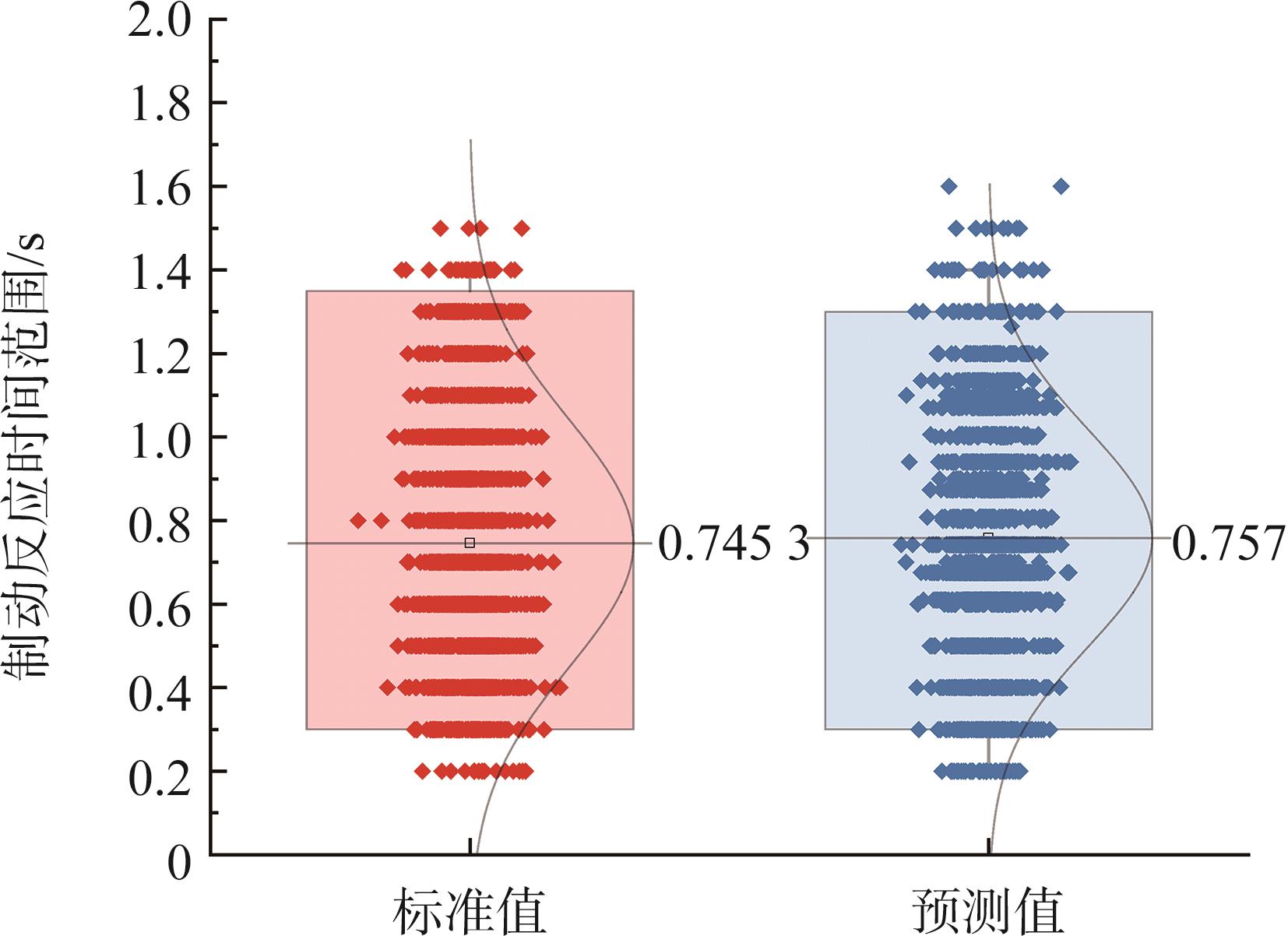
图12
模型测试结果"
| 1 | CHOUDHARY P, VELAGA N R. Modelling driver distraction effects due to mobile phone use on reaction time[J]. Transportation Research Part C: Emerging Technologies, 2017, 77(77): 351-365. |
| 2 | EDQUIST J , RUDIN-BROWN C M , LENNE M G . The effects of on-street parking and road environment visual complexity on travel speed and reaction time[J]. Accident Analysis & Prevention, 2012, 45:759-765. |
| 3 | 朱西产,魏昊舟,马志雄.基于自然驾驶数据的跟车场景潜在风险评估[J].中国公路学报,2020,33(4):169-181. |
| ZHU Xichan, WEI Haozhou, MA Zhixiong. Assessment of the potential risk in car-following scenario based on naturalistic driving data[J]. China Journal of Highway and Transport,2020,33(4):169-181. | |
| 4 | 吕能超,任泽远,段至诚,等. Near-crash事件中驾驶人行为特征分析[J].中国安全科学学报,2017,27(6):19-24. |
| LV Nengchao, REN Zeyuan, DUAN Zhicheng, et al. Analysis of driving behavior characteristics of drivers in near-crash events[J]. China Safety Science Journal, ,2017, 27(6): 19-24. | |
| 5 | 郑刚,俎兆飞,孔祚. 基于驾驶员反应时间的自动紧急制动避撞策略[J]. 重庆理工大学学报(自然科学),2020,34(12): 45-52. |
| ZHENG Gang, ZU Zhaofei, KONG Zuo. The collision avoidance strategy of automatic emergency braking system considering the response time of the driver[J]. Journal of Chongqing University of Technology (Natural Science), 2020, 34(12): 45-52. | |
| 6 | 吴斌,朱西产,沈剑平.基于自然驾驶数据的驾驶员紧急制动行为特征[J].同济大学学报(自然科学版),2018,46(11):1514-1519,1535. |
| WU Bin, ZHU Xichan, SHEN Jianping. Driver emergency braking behavior based on naturalistic driving data[J]. Journal of Tongji University(Natural Science), 2018,46(11):1514-1519,1535. | |
| 7 | SHEVTSOVA A, NOVIKOV I, BOROVSKOY A. Research of influence of time of reaction of the driver on the calculation of the capacity of the highway[J]. Transport Problems, 2015, 10(3):53-59. |
| 8 | 林庆峰, 王兆杰, 鲁光泉.L3级自动驾驶汽车的接管安全性评价模型[J].汽车工程,2019,41(11):1258-1264. |
| LIN Qingfeng, WANG Zhaojie, LU Guangquan. Takeover safety evaluation model for level 3 automated vehicles[J]. Automotive Engineering,2019,41(11):1258-1264. | |
| 9 | SENA P, d’AMORE M, BRANDIMONTE M A, et al. Experimental framework for simulators to study driver cognitive distraction: brake reaction time in different levels of arousal[J]. Transportation Research Procedia, 2016, 14: 4410-4419. |
| 10 | GREEN M. " How long does it take to stop?" Methodological analysis of driver perception-brake times[J]. Transportation Human Factors, 2000, 2(3): 195-216. |
| 11 | 何莎, 闫学东, 庞洪涛,等. 雾天对驾驶行为的影响研究——避撞驾驶行为[J]. 交通信息与安全, 2014, 32(5):126-129. |
| HE S, YAN X, PANG H, et al. Driving behaviors——crash avoidance driving behaviors [J]. Journal of Transport Information and Safety, 2014, 32(5):126-129. | |
| 12 | 菅美英,石京.老年驾驶员跟驰行为及影响因素研究[J].中国安全科学学报,2017,27(6):25-30. |
| JIAN Meiying, SHI Jing. Study on older drivers' car following behavior and influencing factors[J]. China Safety Science Journal, 2017, 27(6): 25-30. | |
| 13 | 刘通,付锐,马勇,等.考虑驾驶人风格的跟车预警规则研究[J].中国公路学报,2020,33(2):170-180. |
| LIU Tong, FU Rui, MA Yong, et al. Car-following warning rules considering driving styles[J]. China Journal of Highway and Transport, 2020,33(2):170-180. | |
| 14 | 李霖,朱西产,董小飞,等. 自主紧急制动系统避撞策略的研究[J].汽车工程,2015,37(2):168-174. |
| LI Lin, ZHU Xichan, DONG Xiaofei, et al. A research on the collision avoidance strategy for autonomous emergency braking system[J]. Automotive Engineering, 2015, 37(2): 168-174. | |
| 15 | MEHMOOD A, EASA S M. Modeling reaction time in car-following behaviour based on human factors[J]. International Journal of Applied Science, Engineering and Technology, 2009, 5(14): 93-101. |
| 16 | SUMMALA H. Brake reaction times and driver behavior analysis[J]. Transportation Human Factors, 2000, 2(3): 217-226. |
| 17 | 张卓鹏. 基于驾驶行为的车车协同防撞预警方法研究[D].重庆:重庆邮电大学,2020. |
| ZHANG Zhuopeng. Research on vehicle cooperative collision warning method based on driver behavior[D].Chongqing: Chongqing University of Posts and Telecommunications,2020. | |
| 18 | KIDD D G, BUONAROSA M L. Distracting behaviors among teenagers and young, middle-aged, and older adult drivers when driving without and with warnings from an integrated vehicle safety system[J]. Journal of Safety Research, 2017, 61: 177-185. |
| 19 | GUO B, JIN L , SHI J, et al. A risky prediction model of driving behaviors: especially for cognitive distracted driving behaviors[C]. 2020 4th CAA International Conference on Vehicular Control and Intelligence (CVCI). 2020. |
| 20 | LIKERT R. A technique for the measurement of attitudes[J]. Archives of Psychology, 1932. |
| 21 | 卢守峰,刘改红,刘喜敏.引入期望速度的交通流中观模型研究[J].交通运输系统工程与信息,2013,13(2):81-89. |
| LU Shoufeng, LIU Gaihong, LIU Ximin. A traffic kinetic model considering desired speed[J]. Journal of Transportation Systems Engineering and Information Technology,2013,13(2):81-89. | |
| 22 | 袁伟,付锐,马勇,等.基于高速实车驾驶数据的驾驶人跟车模型研究[J].汽车工程,2015,37(6):679-685. |
| YUAN W, FU R, MA Y, et al. A study on driver's vehicle——following model based on high speed real driving data[J]. Automotive Engineering, 2015, 37(6): 679-685. | |
| 23 | 杨俊儒. 考虑人车路耦合的车速自适应决策控制研究[D].武汉:武汉理工大学,2019. |
| YANG Junru. Research on vehicle speed adaptive decision control considering human-vehicle-road coupling[D]. Wuhan: Wuhan University of Technology,2019. | |
| 24 | HE Yi, SUN Changxin, HUANG Helai,et al. Safety of micro-mobility: riders’ psychological factors and risky behaviors of cargo TTWs in China[J]. Transportation Research Part F: Psychology and Behaviour,2021,80. |
| 25 | 吴明隆. 结构方程模型--Amos的操作与应用[M]. 2版. 重庆:重庆大学出版社, 2017. |
| WU Minglong. Structural equation model--operation and application of Amos[M]. 2nd ed. Chongqing: Chongqing University Press, 2017. | |
| 26 | TENENHAUS M, VINZI V E, CHATELIN Y M, et al. PLS path modeling[J]. Computational Statistics & Data Analysis, 2005, 48(1): 159-205. |
| 27 | JIN L, GUO B, JIANG Y, et al. Analysis on the influencing factors of driving behaviours based on theory of planned behavior[J]. Advances in Civil Engineering, 2020, 2020. |
| 28 | 秦伟,徐国艳,余贵珍.基于BP神经网络的汽车车载称重系统研究[J].汽车工程, 2017,39(5):599-605. |
| QIN Wei, XU Guoyan, YU Guizhen. A research on vehicle on-board weighing system based on BP neural network[J]. Automotive Engineering, 2017, 39(5): 599-605. |
| [1] | 王彦鑫,李海岩,崔世海,贺丽娟,吕文乐. 基于BP神经网络的儿童乘员头部损伤预测模型及评估参数研究[J]. 汽车工程, 2024, 46(2): 329-336. |
| [2] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [3] | 陈国强,申正义,孙利,支梦帆,李彤. 基于BP神经网络优化遗传算法的智能座舱感性意象预测[J]. 汽车工程, 2023, 45(8): 1479-1488. |
| [4] | 马艳丽,卢俊,朱洁玉,韩笑雪. 不同认知负荷非驾驶任务下高度自动化驾驶接管绩效预测[J]. 汽车工程, 2023, 45(12): 2330-2337. |
| [5] | 龙文民,鲁光泉,石茜,谭海天. 基于驾驶人跟驰特性的前撞预警指标与阈值确定方法[J]. 汽车工程, 2022, 44(9): 1339-1349. |
| [6] | 梁旺,秦兆博,陈亮,边有钢,胡满江. 基于改进BP神经网络的智能车纵向控制方法[J]. 汽车工程, 2022, 44(8): 1162-1172. |
| [7] | 郭祥靖,孙攀,邓杰,刘勇,刘壮,刘双平. 基于BP神经网络算法预测的重型半挂汽车列车AEB控制策略研究[J]. 汽车工程, 2021, 43(9): 1350-1359. |
| [8] | 金立生,谢宪毅,司法,郭柏苍,石健. 考虑驾驶人特性的智能驾驶路径跟踪算法[J]. 汽车工程, 2021, 43(4): 553-561. |
| [9] | 李亚勇, 蔡英凤, 陈龙, 孙晓强, 何友国, 张云顺. 考虑前后方车辆行驶状态的ACC系统控制方法*[J]. 汽车工程, 2019, 41(8): 865-871. |
| [10] | 刘志强, 韩静文, 倪捷. 基于驾驶人特性的自适应换道预警算法研究*[J]. 汽车工程, 2019, 41(4): 440-446. |
|