汽车工程 ›› 2022, Vol. 44 ›› Issue (7): 1009-1017.doi: 10.19562/j.chinasae.qcgc.2022.07.007
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
盛树轩,荆崇波,蒋朝阳( )
)
Shuxuan Sheng,Chongbo Jing,Chaoyang Jiang()
摘要:
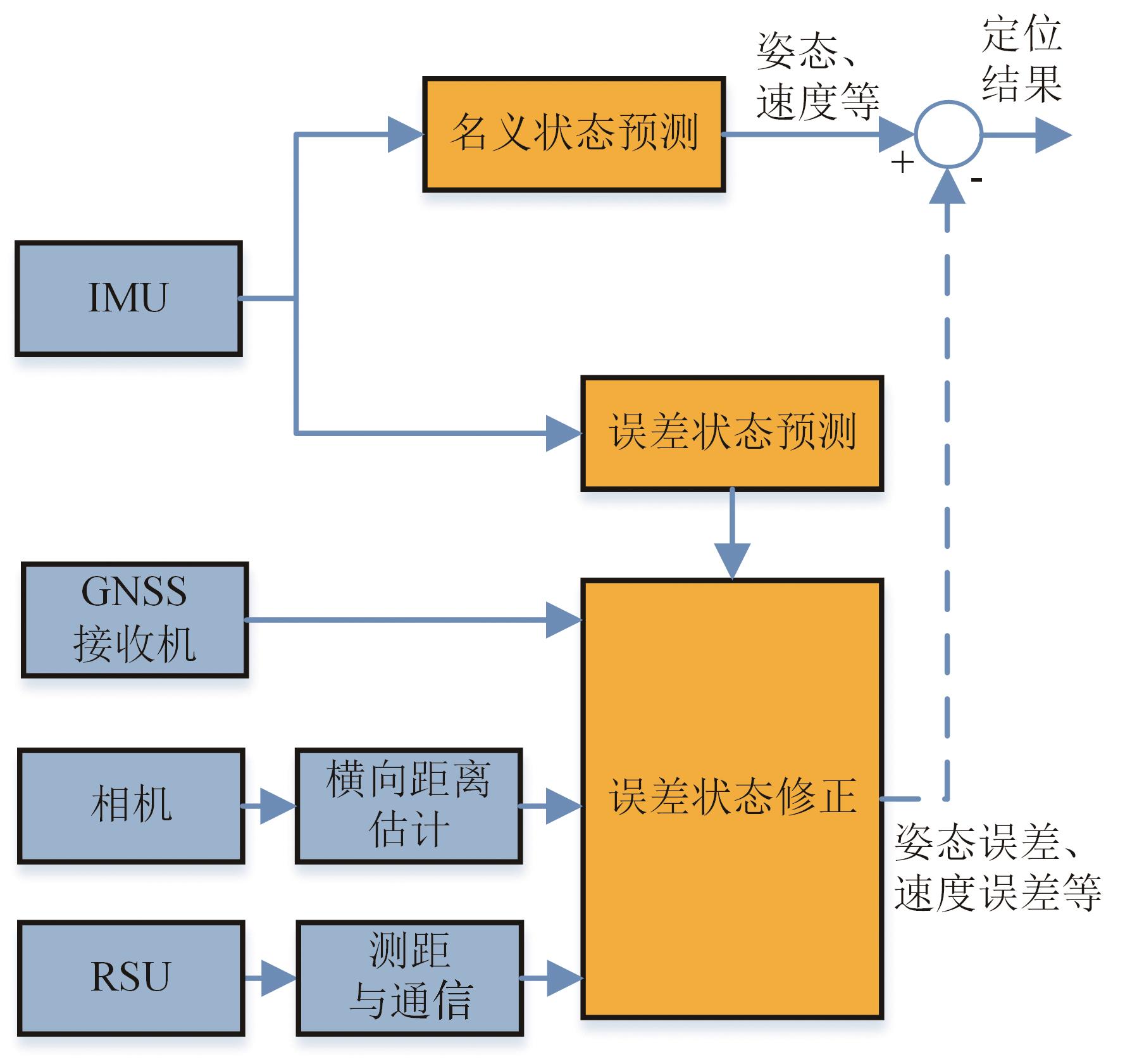
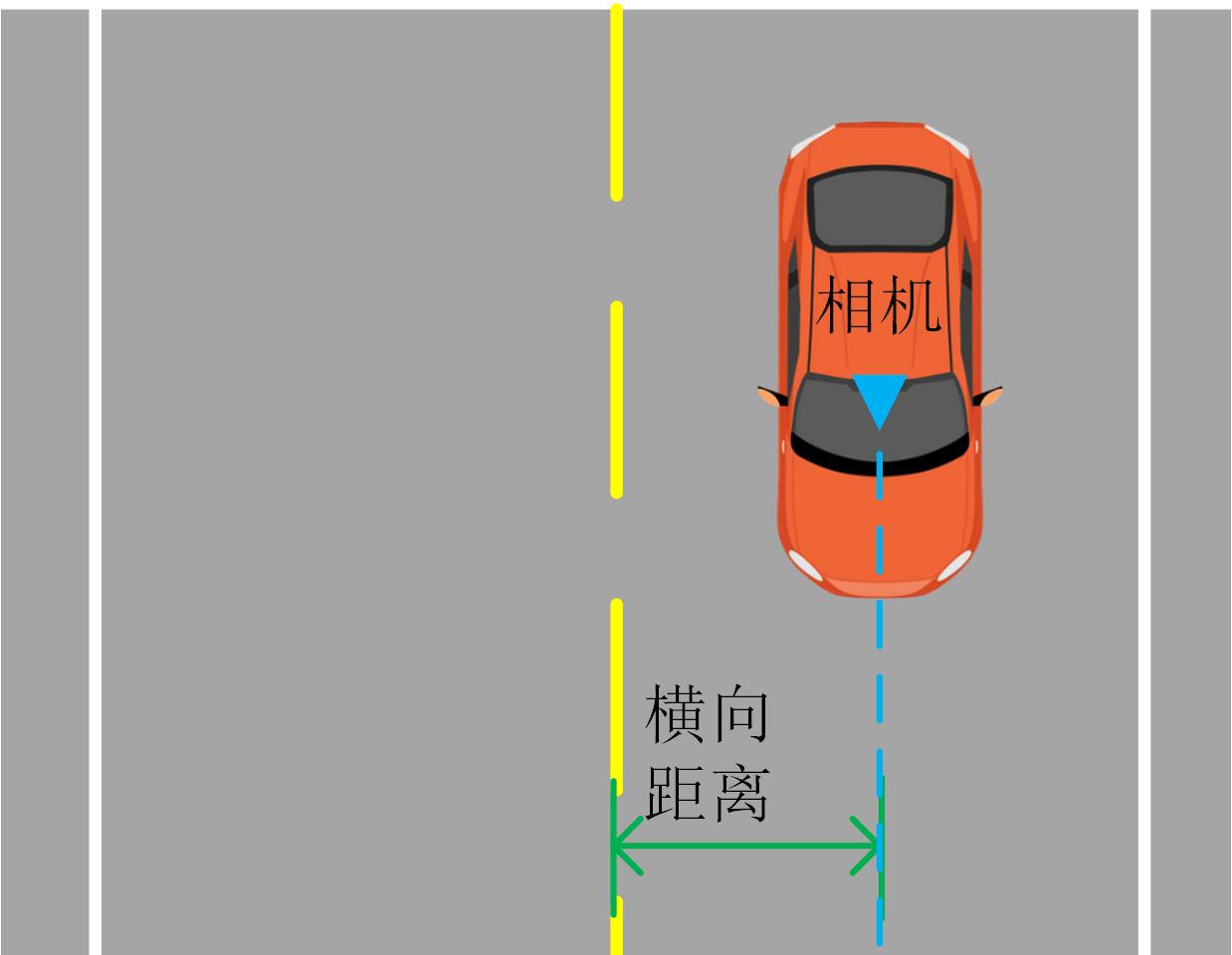
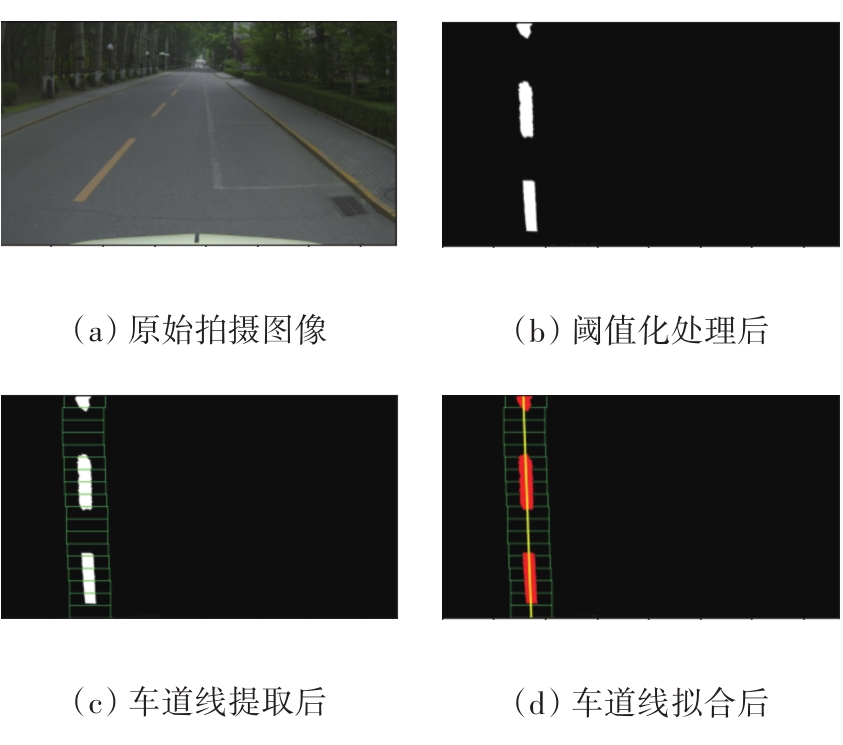
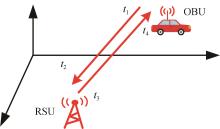
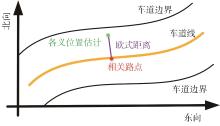
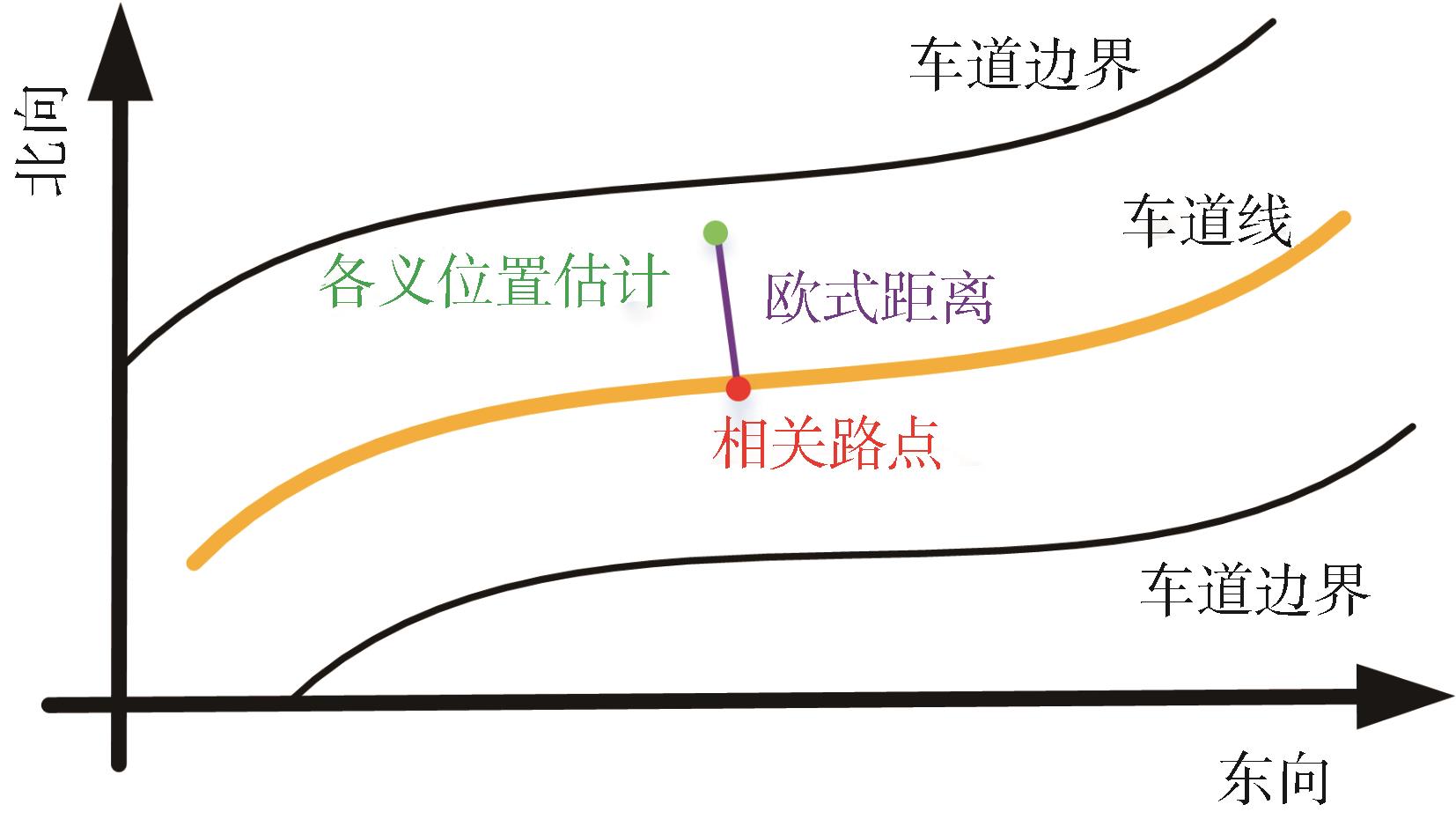
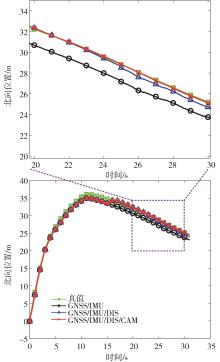
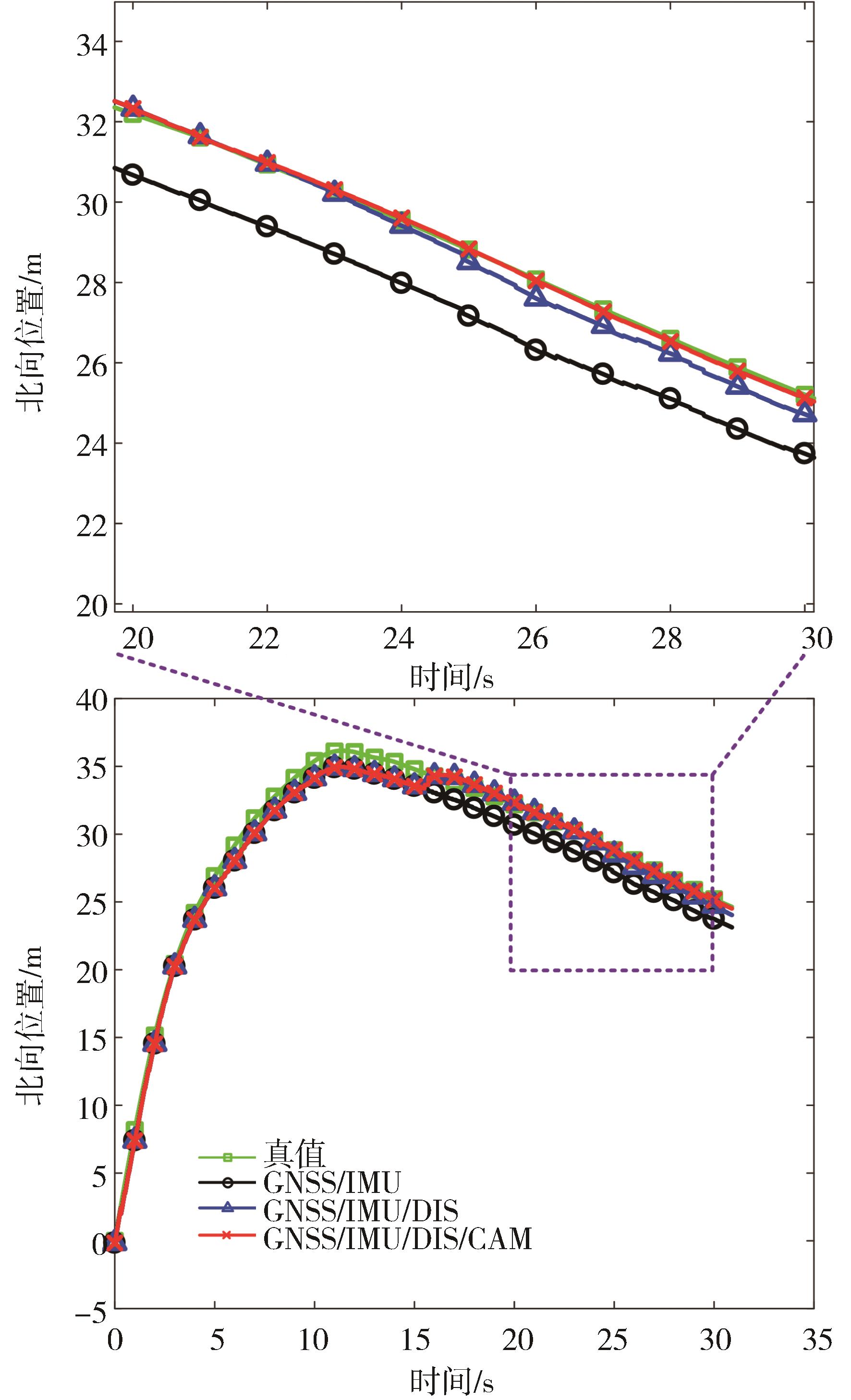
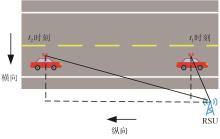
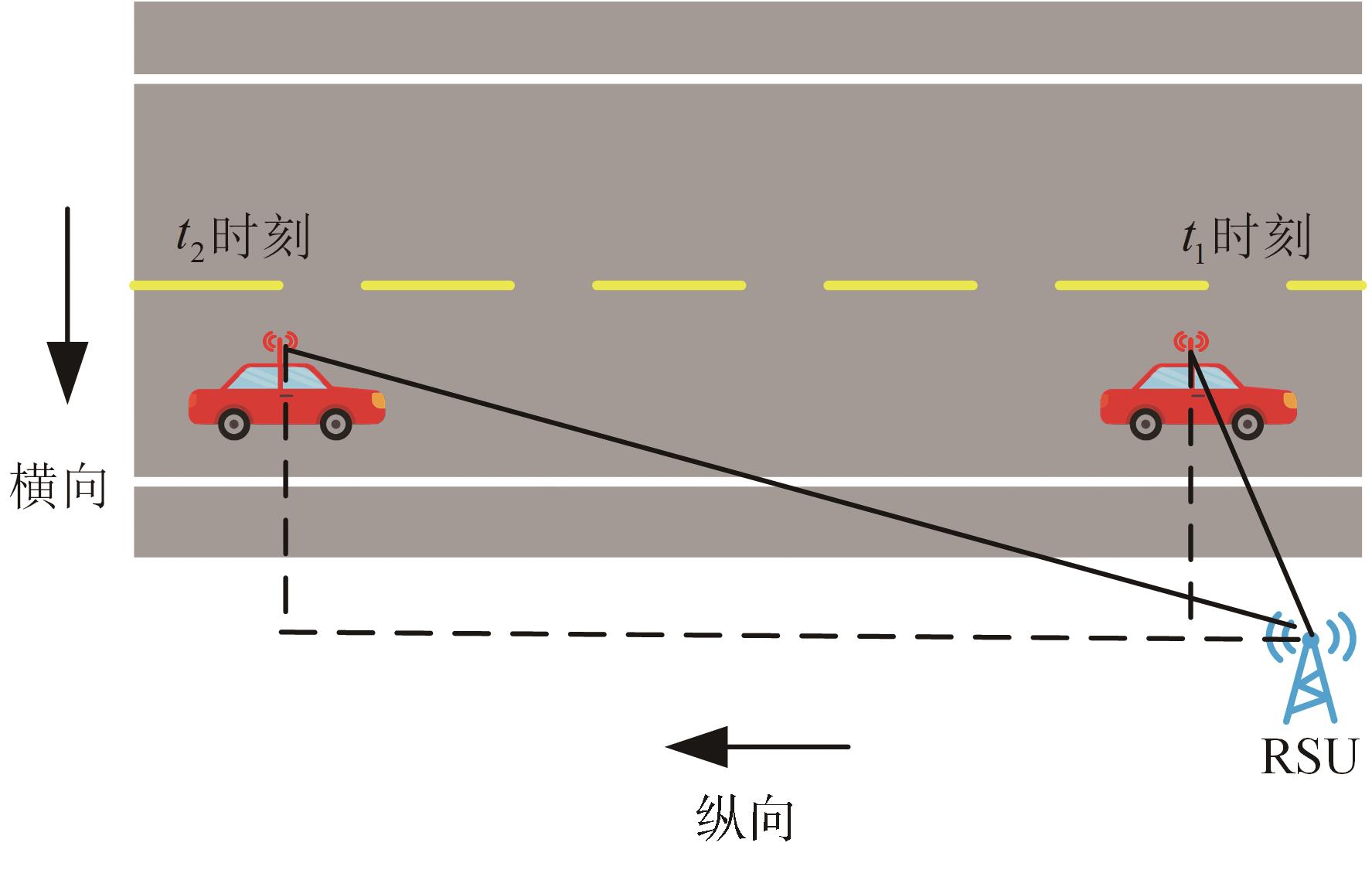
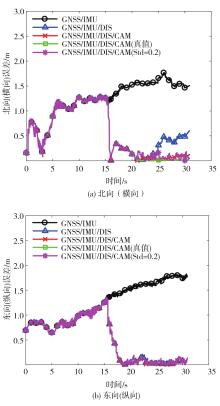
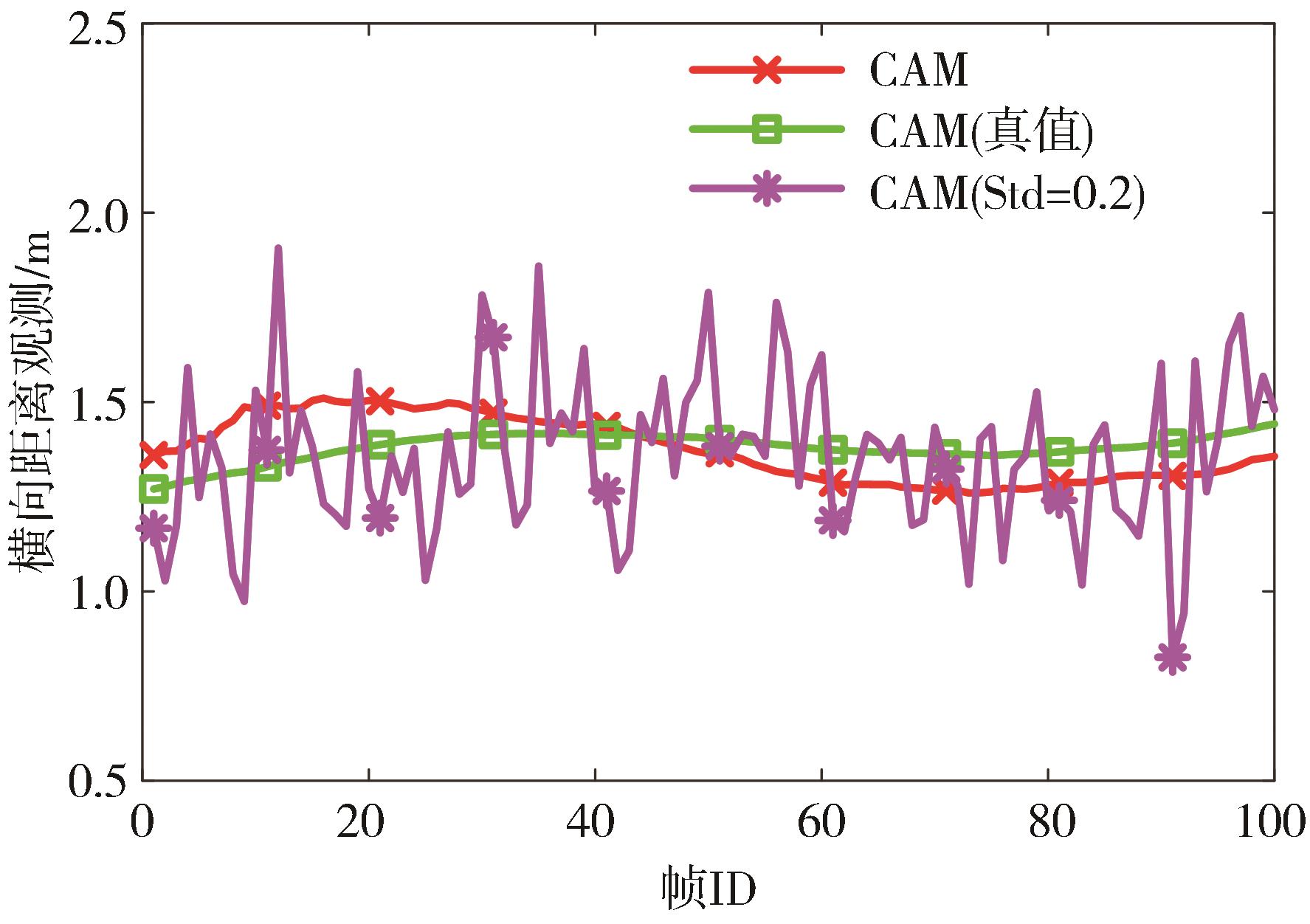
为准确获取在城市峡谷等GNSS定位受限环境下的车辆位置,提出了一种视觉与单路侧单元(RSU)辅助的车辆定位方法。利用相机观测车辆到车道线的横向距离,利用单RSU与车辆进行测距与通信,通过误差状态卡尔曼滤波算法对GNSS、IMU、RSU和相机观测信息进行融合,实现对车辆位姿的准确估计。针对上述方法进行了实车测试,分析了单RSU测距信息和横向距离观测对定位结果的影响。结果表明:单RSU测距信息可有效降低纵向定位误差,但对横向定位误差的修正作用随着远离RSU逐渐降低,横向距离观测可有效弥补这一不足。二者优势互补,水平定位均方根误差小于10 cm,验证了所提出方法的有效性。