汽车工程 ›› 2022, Vol. 44 ›› Issue (7): 997-1008.doi: 10.19562/j.chinasae.qcgc.2022.07.006
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
赵健1,宋东鉴1,朱冰1( ),吴杭哲2,韩嘉懿1,刘宇翔1
),吴杭哲2,韩嘉懿1,刘宇翔1
收稿日期:2021-11-15
修回日期:2022-02-20
出版日期:2022-07-25
发布日期:2022-07-20
通讯作者:
朱冰
E-mail:zhubing@jlu.edu.cn
基金资助:
Jian Zhao1,Dongjian Song1,Bing Zhu1(),Hangzhe Wu2,column:Han Jiayi1,Yuxiang Liu1
Received:2021-11-15
Revised:2022-02-20
Online:2022-07-25
Published:2022-07-20
Contact:
Bing Zhu
E-mail:zhubing@jlu.edu.cn
摘要:
交通车意图识别对提升智能汽车决策规划性能具有重要意义。本文从驾驶行为生成机理角度分析了驾驶人换道过程的各阶段,分别建立了基于马尔可夫决策过程的驾驶人意图预测模型、基于动态安全场的换道可行性分析模型和基于双向多长短期记忆网络(Bi-LSTM)的车辆行为识别模型。通过融合具有明确时序关系的上述模型,提出了一种数据机理混合驱动的交通车意图识别方法,并利用NGSIM数据集进行模型训练和验证。结果表明该方法在交通车到达换道点前1.8 s处的识别准确率即超过90%,在换道点处识别准确率可达97.88%,具有较高的识别准确率和较长的提前识别时间。
赵健,宋东鉴,朱冰,吴杭哲,韩嘉懿,刘宇翔. 数据机理混合驱动的交通车意图识别方法[J]. 汽车工程, 2022, 44(7): 997-1008.
Jian Zhao,Dongjian Song,Bing Zhu,Hangzhe Wu,column:Han Jiayi,Yuxiang Liu. Traffic Vehicles Intention Recognition Method Driven by Data and Mechanism Hybrid[J]. Automotive Engineering, 2022, 44(7): 997-1008.
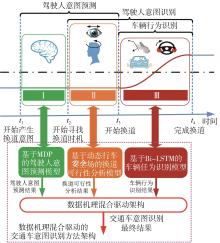
图1
驾驶人换道行为时间轴与意图识别方法架构"


图2
影响PV的周围相关车辆"
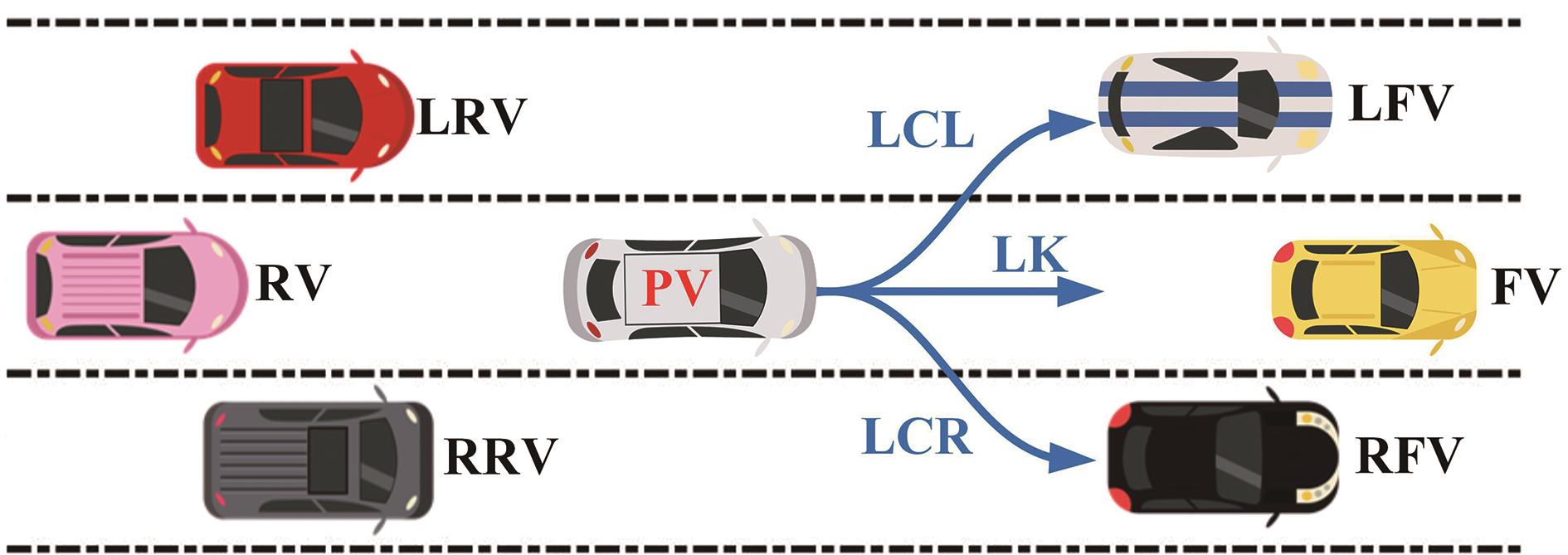
表1
IDM参数标定结果"
| IDM参数 | |||||
|---|---|---|---|---|---|
| 取值 | 27.19 | 6.73 | 1.53 | 2.01 | 1.77 |
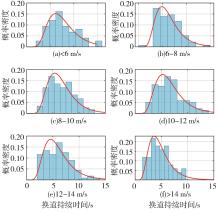
图3
换道持续时间概率密度分布"
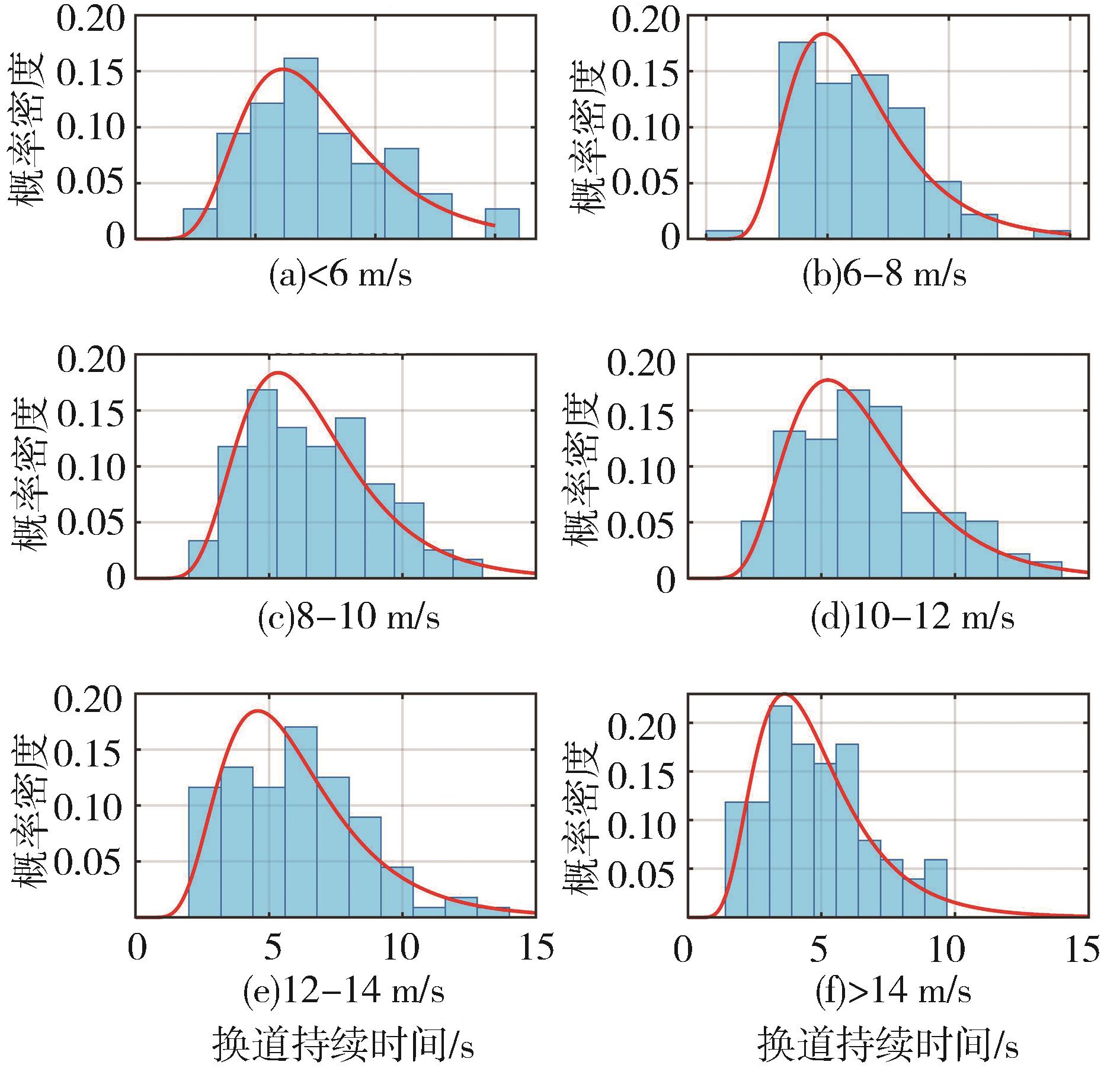
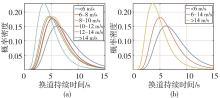
图4
换道持续时间概率密度分布对比"
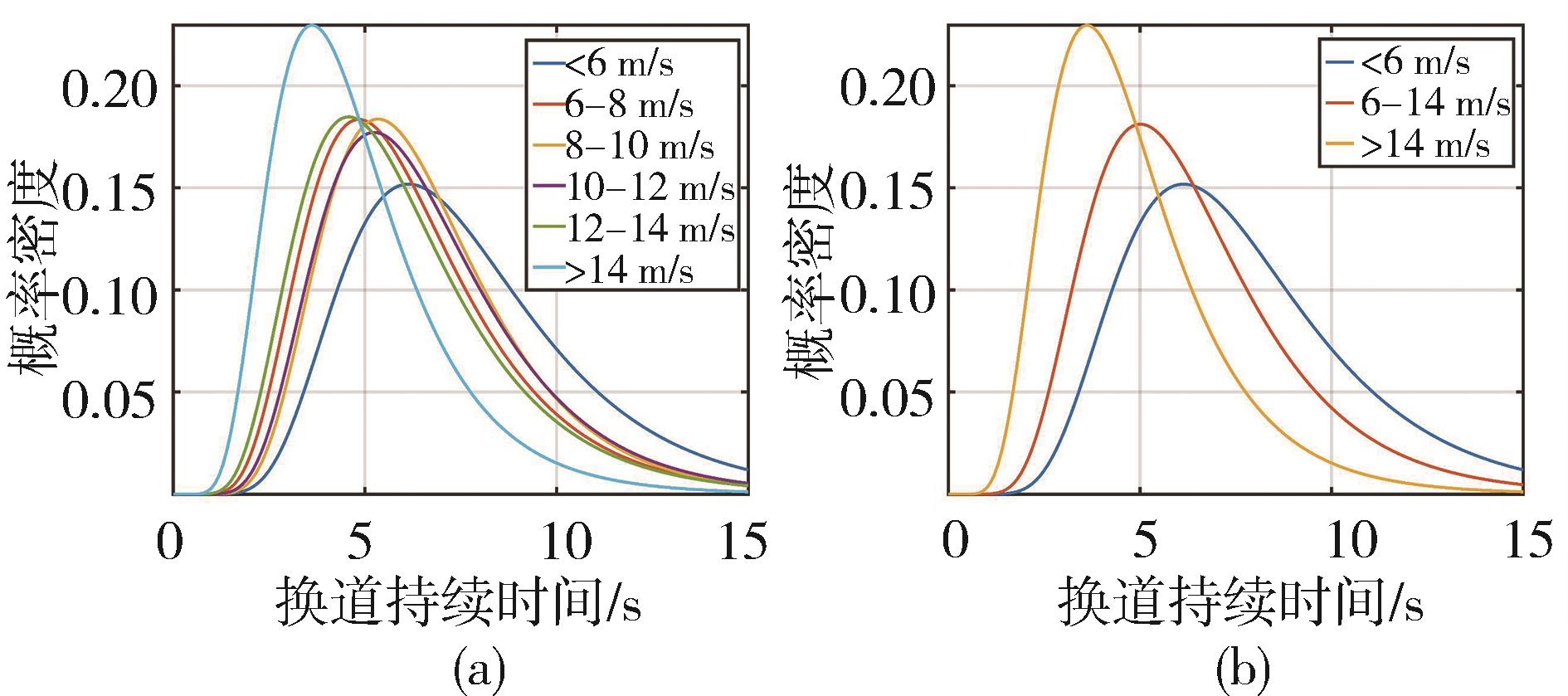
表2
对数正态分布参数"
| 初始速度区间/(m·s-1) | ||
|---|---|---|
| <6 | 1.971 3 | 0.395 8 |
| 6-14 | 1.779 6 | 0.404 7 |
| >14 | 1.476 7 | 0.436 3 |
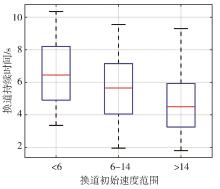
图5
换道持续时间箱型图"
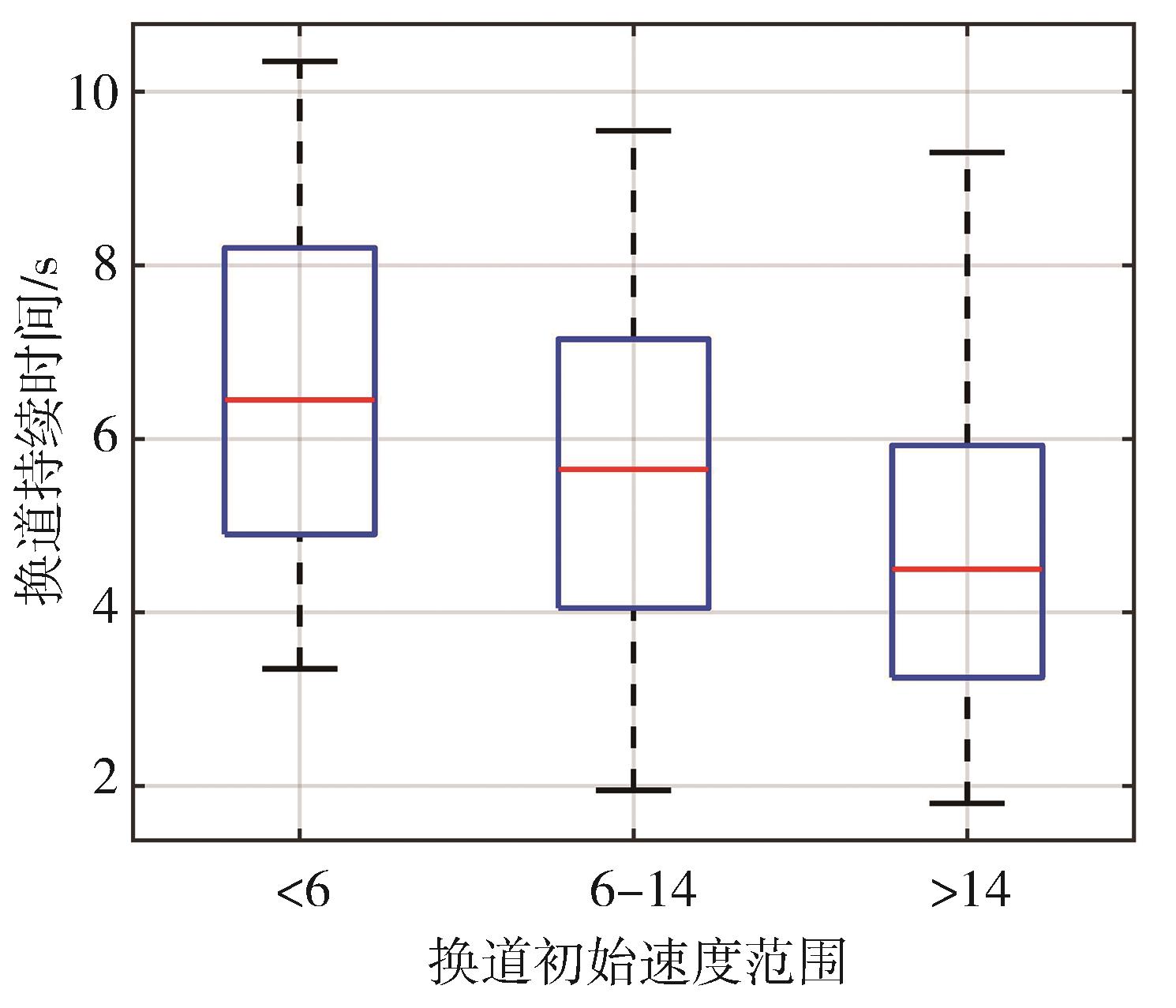
表3
不同换道初始速度下的换道持续时间"
| 初始速度区间/(m·s-1) | 换道持续时间/s |
|---|---|
| <6 | 6.6 |
| 6-14 | 5.7 |
| >14 | 4.7 |

图6
基于Seq2seq的PV周围车辆轨迹预测模型结构"
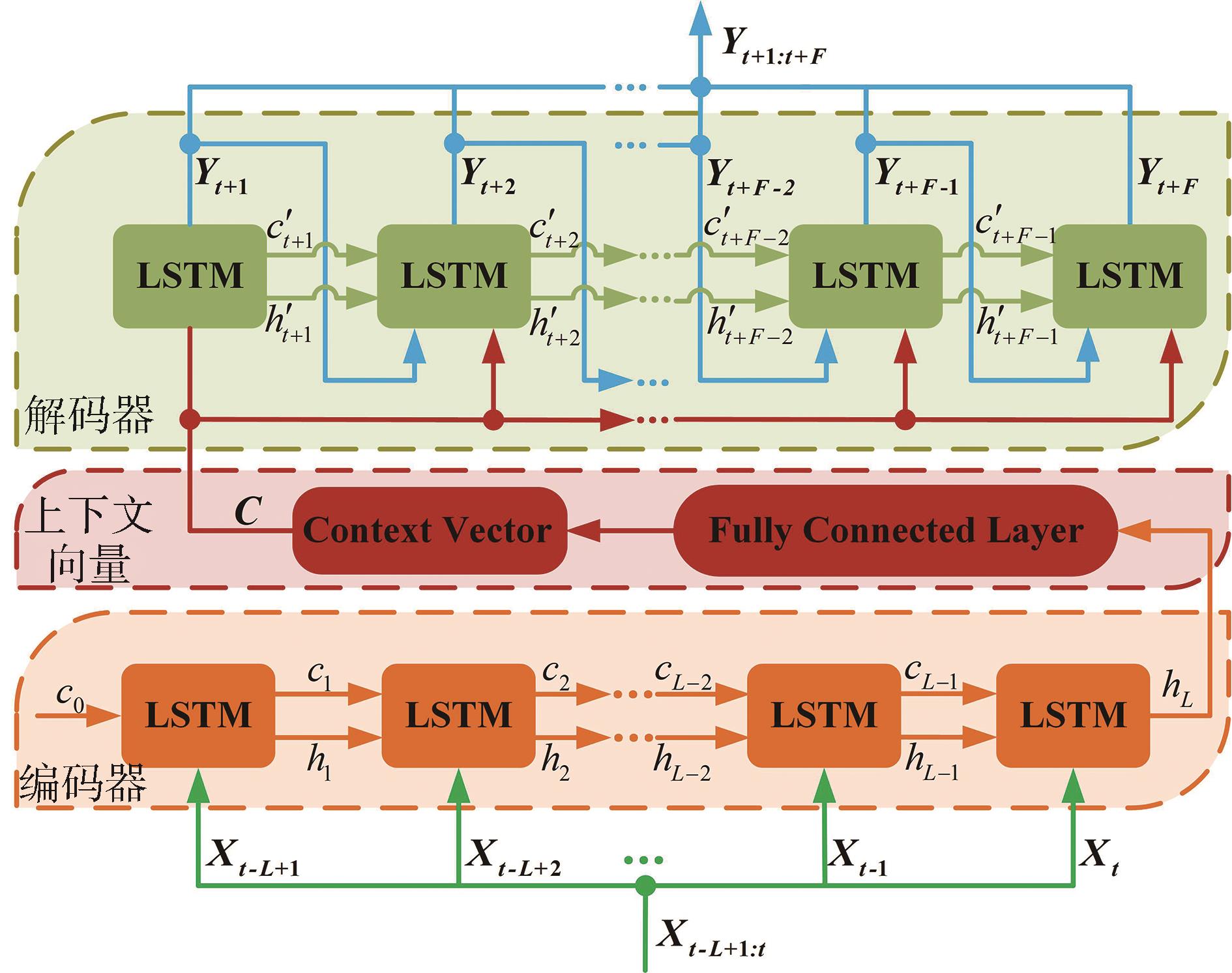
表4
不同预测时间窗下的RMSE"
| 预测时间窗长度/s | RMSE/m |
|---|---|
| 6.6 | 5.45 |
| 5.7 | 4.96 |
| 4.7 | 3.7 |

图7
预测时间窗为4.7 s时PV周围车辆轨迹预测结果"
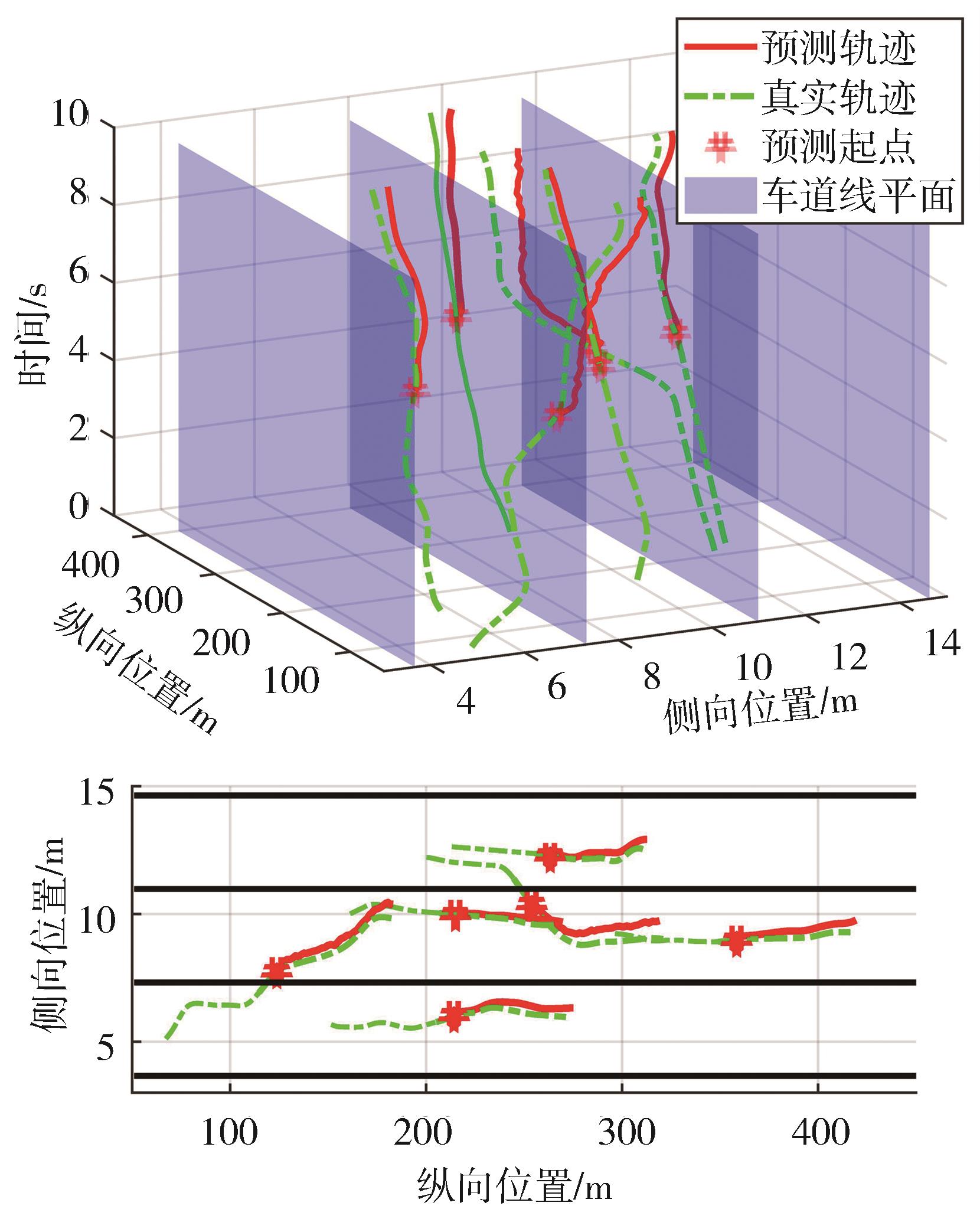
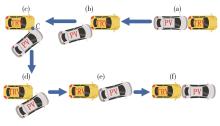
图8
PV与TRV发生碰撞情况"


图9
换道起始时刻FV、TRV、TFV场强分布"

表5
换道行为驱动诱因统计"
| (速度优势,距离优势,安全性优势) | 比例/% |
|---|---|
| (1,1,1) | 15.57 |
| (1,1,0) | 8.98 |
| (1,0,1) | 35.63 |
| (1,0,0) | 17.07 |
| (0,0,0) | 9.58 |
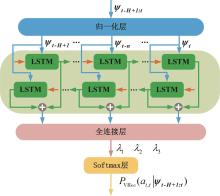
图10
Bi-LSTM网络结构"
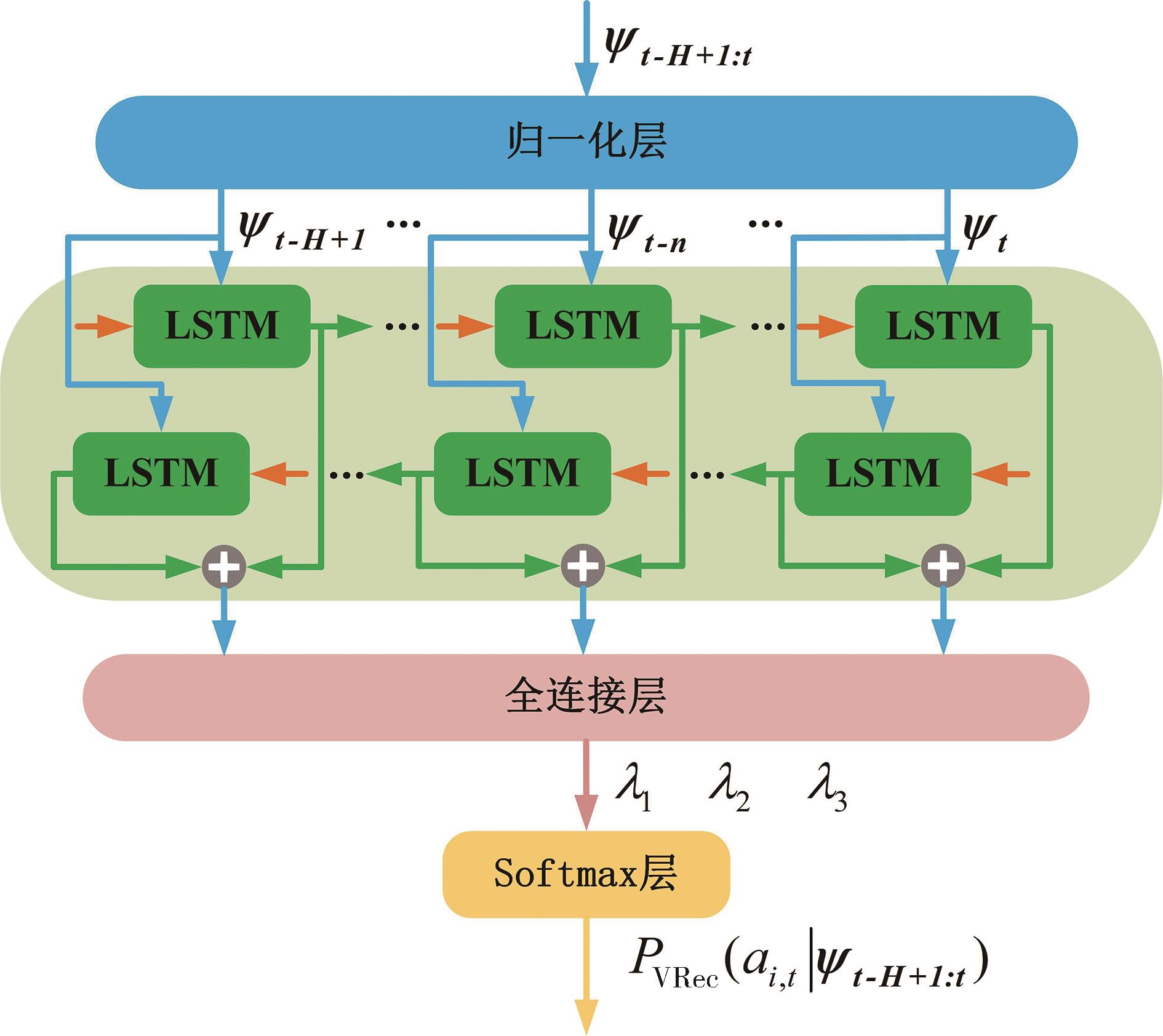
图11
数据机理混合驱动的交通车意图识别架构"
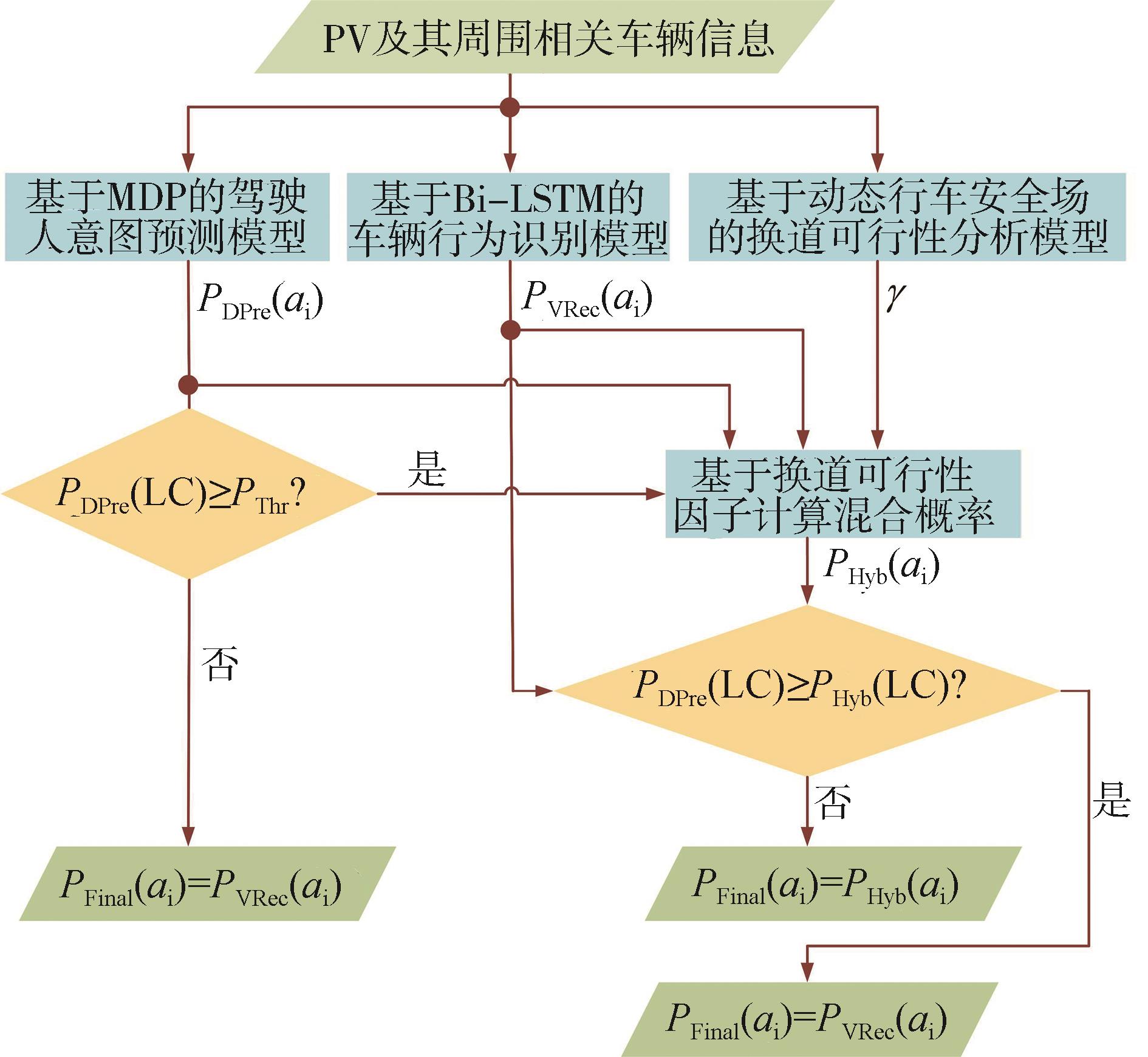
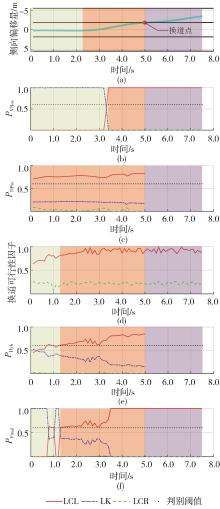
图12
交通车意图识别过程"
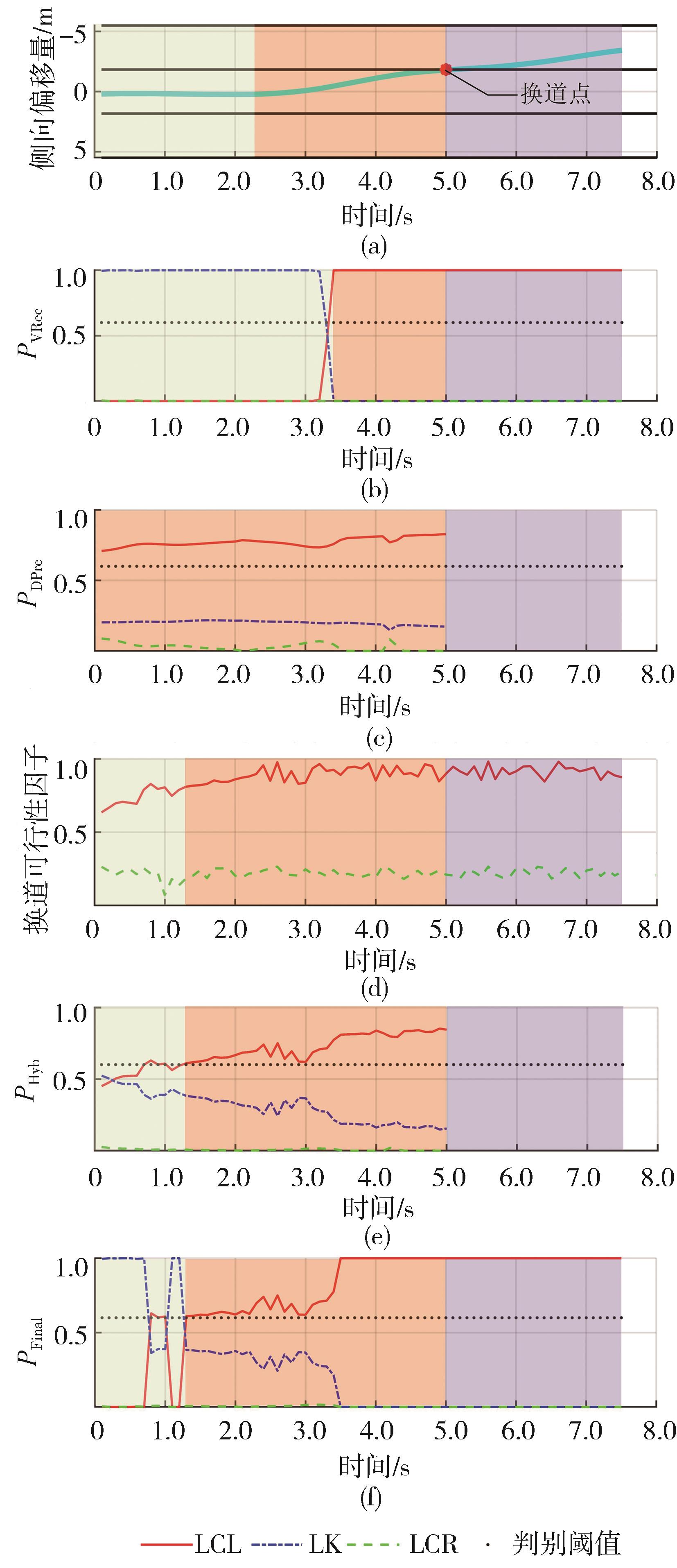
表6
意图识别混淆矩阵"
| 真实意图 | LCL | LK | LCR | |
|---|---|---|---|---|
| 识别意图 | LCL | 0.995 7 | 0.085 5 | 0.012 4 |
| LK | 0.002 9 | 0.910 3 | 0.055 9 | |
| LCR | 0.001 4 | 0.004 3 | 0.931 7 | |
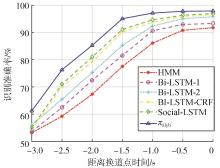
图13
识别准确率对比"

表7
识别性能指标对比 (%)"
| 意图 | 指标 | 模型类别 | ||
|---|---|---|---|---|
| Social-LSTM | Bi-LSTM-2 | |||
| LCL | 精确率 | 99.71 | 99.54 | 91.67 |
| 召回率 | 94.71 | 89.02 | 84.26 | |
| F1分数 | 97.14 | 94.28 | 87.81 | |
| LK | 精确率 | 85.37 | 72.47 | 71.74 |
| 召回率 | 93.75 | 92.86 | 88.39 | |
| F1分数 | 89.36 | 81.84 | 79.21 | |
| LCR | 精确率 | 90.36 | 89.02 | 82.28 |
| 召回率 | 98.68 | 96.05 | 85.53 | |
| F1分数 | 94.34 | 92.41 | 83.87 | |
| 准确率 | 95.06 | 91.13 | 85.28 | |
| 1 | YANG X, CHEN L, WANG H, et al. Driver lane change intention inference for intelligent vehicles: framework, survey, and challenges[J]. IEEE Transaction on Vehicular Technology, 2019, 68(5): 4377-4390. |
| 2 | BALAL E, CHEU L C, SARKODIE-GYAN T. A binary decision model for discretionary lane changing move based on fuzzy inference system [J]. Transportation Research Part C: Emerging Technologies, 2016, 67: 47-61 |
| 3 | 谢枫, 娄静涛, 赵凯, 等. 基于行为识别和曲率约束的车辆轨迹预测方法研究[J]. 汽车工程, 2019, 41(9): 1036-1042. |
| XIE F, LOU J, ZHAO K, et al. A research on vehicle trajectory prediction method based on behavior recognition and curvature constraints [J]. Automotive Engineering, 2019, 41(9): 1036-1042. | |
| 4 | 谢辉, 高斌, 熊硕, 等. 结构化道路中动态车辆的轨迹预测[J]. 汽车安全与节能学报, 2019, 10(4): 413-422. |
| XIE H, GAO B, XIONG S, et al. Trajectory prediction of dynamic vehicles in structured roads [J]. Journal of Automotive Safety and Energy, 2019, 10(4): 413-422. | |
| 5 | BAHRAM M, LAWITZKY A, FRIEDRICHS J, et al. A game-theoretic approach to replanning-aware interactive scene prediction and planning [J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 3981-3992. |
| 6 | KASPER D, WEIDL G, DANG T, et al. Object-oriented bayesian networks for detection of lane change maneuvers [J]. IEEE Intelligent Transportation Systems Magazine, 2012, 4(3): 19–31. |
| 7 | TALEBPOUR A, MAHMASSANI H, HAMDAR S. Modeling lane-changing behavior in a connected environment: a game theory approach [J]. Transportation Research Part C: Emerging Technologies, 2015, 59: 216-232. |
| 8 | YU H, TSENG H, LANGARI R. A human-like game theory-based controller for automatic lane changing [J]. Transportation Research Part C: Emerging Technologies, 2018, 88: 140-158. |
| 9 | BAHRAM M, HUBMANN C, LAWITZKY A, et al. A combined model- and learning-based framework for interaction-aware maneuver prediction [J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(6): 1538-1550. |
| 10 | 宗长富, 王畅, 何磊, 等. 基于双层隐式马尔科夫模型的驾驶意图辨识[J]. 汽车工程, 2011, 33(8): 701-706. |
| ZONG C, WANG C, HE L, et al. Driving intention recognition based on double-layer HMM[J]. Automotive Engineering, 2011, 33(8): 701-706. | |
| 11 | 刘志强, 吴雪刚, 倪捷,等. 基于HMM和SVM级联算法的意图识别算法 [J]. 汽车工程, 2018, 40(7): 858-864. |
| LIU Z, WU X, NI J, et al. Driving intention recognition based on hmm and svm cascade algorithm [J]. Automotive Engineering, 2018, 40(7): 858-864. | |
| 12 | DONG F, FANG Z, JIA B, et al. A data-driven lane-changing model based on deep learning [J]. Transportation Research Part C: Emerging Technologies, 2019, 106: 41-60. |
| 13 | 施冬梅, 肖隆. 基于改进长短时记忆网络的驾驶行为检测方 法研究[J]. 汽车工程, 2021, 43(8): 1203-1209. |
| SHI D, XIAO L. Study on driving behavior detection method based on improved long and short-term memory network [J]. Automotive Engineering, 2021, 43(8): 1203-1209. | |
| 14 | 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6): 34-42. |
| JI X, FEI C, HE X, et al. Intention recognition and trajectory prediction for vehicles using lstm network [J]. China Journal of Highway and Transport, 2019, 32(6): 34-42. | |
| 15 | DAI S, LI L, LI Z, Modeling vehicle interactions via modified LSTM models for trajectory prediction [J]. IEEE Access, 2019, 7: 38287-38296. |
| 16 | 宋晓琳, 曾艳兵, 曹昊天, 等. 基于长短期记忆网络的换道意图识别方法[J]. 中国公路学报, 2021, 34(11): 236-245. |
| SONG X, ZENG Y, CAO H, et al. Lane change intention recognition method based on an LSTM Network [J]. China Journal of Highway and Transport,2021,34(11):236-245. | |
| 17 | 蔡英凤, 邰康盛, 王海, 等. 无人驾驶汽车周边车辆行为识别算法研究[J]. 汽车工程, 2020, 42(11): 1464-1472, 1505. |
| CAI Y, TAI K, WANG H, et al. Research on behavior recognition algorithm of surrounding vehicles for driverless car [J]. Automotive Engineering, 2020, 42(11): 1464-1472, 1505. | |
| 18 | ZHAO L, SONG Y, ZHANG C, et al. T-GCN: a temporal graph convolutional network for traffic prediction [J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(9): 3848-3858. |
| 19 | JEON H, CHOI J, KUM D. SCALE-Net: scalable vehicle trajectory prediction network under random number of interacting vehicles via edge-enhanced graph convolutional neural network [J]. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2020. |
| 20 | Federal Highway Adminnistration. NGSIM-Next Generation Simulation [EB/OL]. http://ops. fhwa. dot. Gov/reafficanalysistools/ngsim. |
| 21 | MA L, QU S. A sequence to sequence learning based car-following model for multi-step predictions considering reaction delay [J]. Transportation Research Part C: Emerging Technologies, 2020, 120. |
| 22 | WANG J, WU J, LI Y. The driving safety field based on driver-vehicle-road interactions [J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2203-2214. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 郝建平,苏炎召,钟志华,黄晋. 面向智能汽车的SOA架构及服务调度机制研究[J]. 汽车工程, 2023, 45(9): 1563-1572. |
| [3] | 赵高士,陈龙,蔡英凤,廉玉波,王海,刘擎超,滕成龙. 融合复杂网络和记忆增强网络的轨迹预测技术[J]. 汽车工程, 2023, 45(9): 1608-1616. |
| [4] | 胡启慧,蔡英凤,王海,陈龙,董钊志,刘擎超. 基于层次图注意的异构多目标轨迹预测方法[J]. 汽车工程, 2023, 45(8): 1448-1456. |
| [5] | 高镇海, 鲍明喜, 高菲, 唐明弘. 基于LSTM概率多模态预期轨迹预测方法[J]. 汽车工程, 2023, 45(7): 1145-1152. |
| [6] | 高翔,陈龙,王歆叶,熊晓夏,李祎承,陈月霞. 基于轨迹预测的智能汽车行驶风险评估方法[J]. 汽车工程, 2023, 45(4): 588-597. |
| [7] | 胡杰,朱琪,陈锐鹏,张敏超,张志豪,刘昊岩. 引入必经点约束的智能汽车全局路径规划[J]. 汽车工程, 2023, 45(3): 350-360. |
| [8] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [9] | 刘正发,吴亚,刘佩根,顾荣琦,陈广. 基于特征和标签联合分布匹配的智能驾驶跨域自适应目标检测[J]. 汽车工程, 2023, 45(11): 2082-2091. |
| [10] | 赵树廉,来飞,李克强,陈涛,孟璋劼,唐逸超,吴思宇,田浩东. 基于数字孪生技术的智能汽车测试方法研究[J]. 汽车工程, 2023, 45(1): 42-51. |
| [11] | 邵文博,李骏,张玉新,王红. 智能汽车预期功能安全保障关键技术[J]. 汽车工程, 2022, 44(9): 1289-1304. |
| [12] | 汪梓豪,蔡英凤,王海,陈龙,熊晓夏. 基于单目视觉运动估计的周边多目标轨迹预测方法[J]. 汽车工程, 2022, 44(9): 1318-1326. |
| [13] | 梁旺,秦兆博,陈亮,边有钢,胡满江. 基于改进BP神经网络的智能车纵向控制方法[J]. 汽车工程, 2022, 44(8): 1162-1172. |
| [14] | 余嘉星,Aliasghar Arab,裴晓飞,过学迅. 考虑路径平滑性和避撞稳定性的智能汽车弯道轨迹规划研究[J]. 汽车工程, 2022, 44(5): 656-663. |
| [15] | 江浩斌,冯张棋,洪阳珂,韦奇志,皮健. 应用于车辆纵向控制的无模型自适应滑模预测控制方法[J]. 汽车工程, 2022, 44(3): 319-329. |
|