汽车工程 ›› 2023, Vol. 45 ›› Issue (3): 409-420.doi: 10.19562/j.chinasae.qcgc.2023.03.008
所属专题: 底盘&动力学&整车性能专题2023年
李子先,潘世举( ),徐友春
),徐友春
Zixian Li,Shiju Pan(),Youchun Xu
摘要:
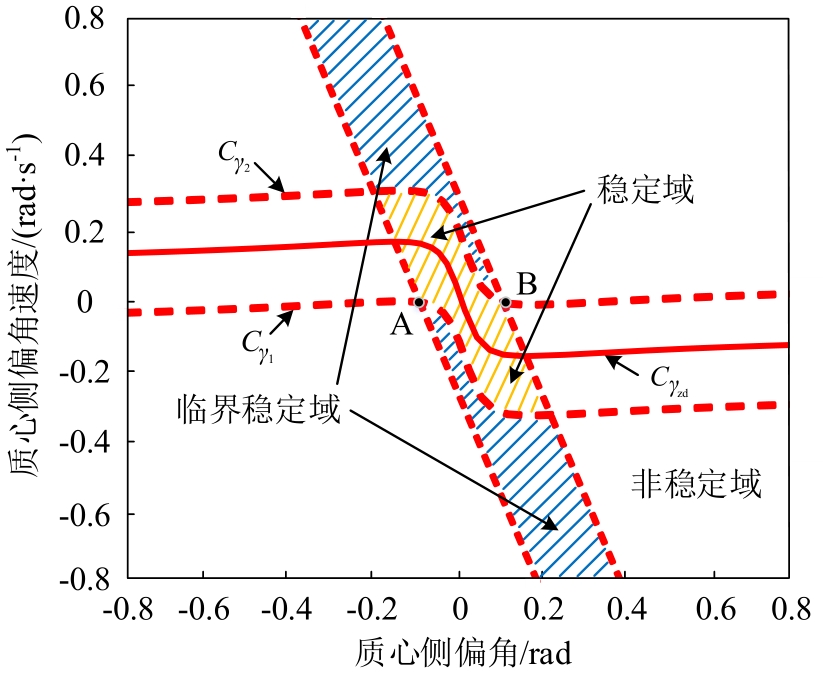
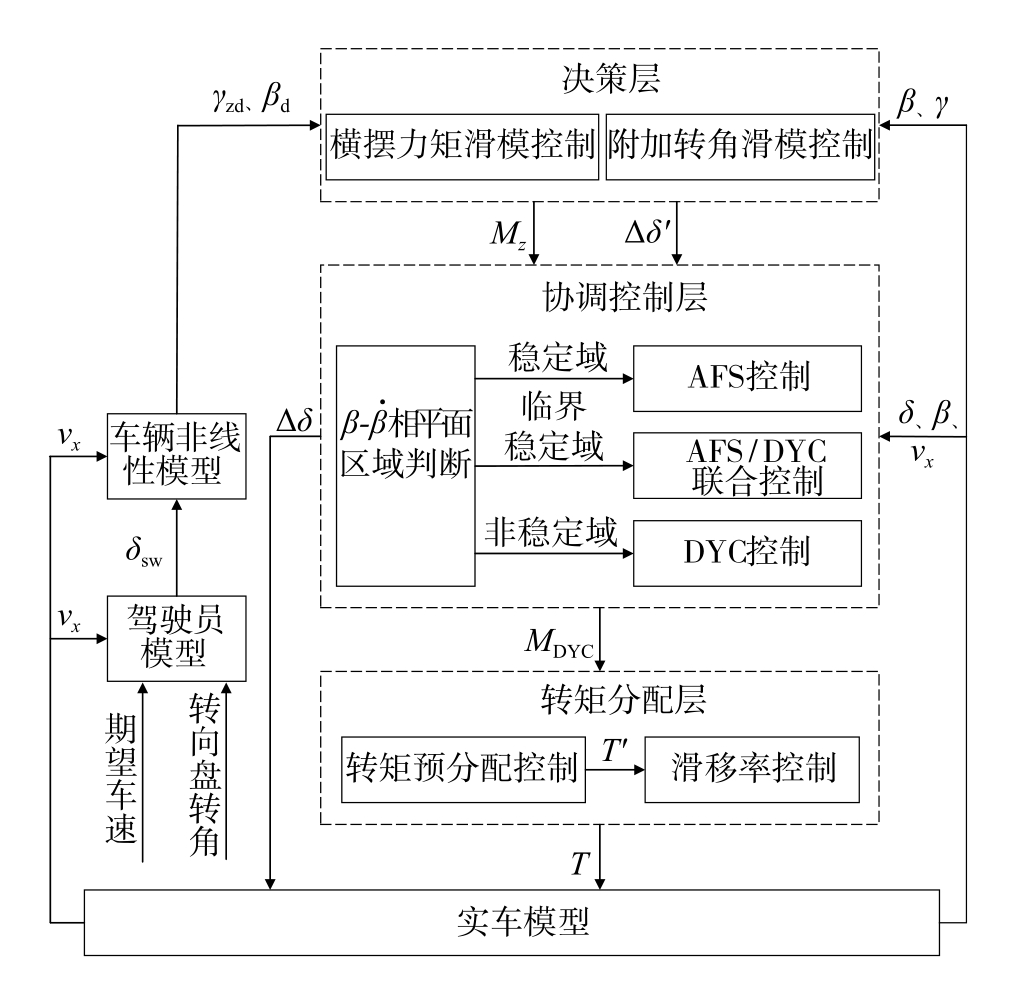
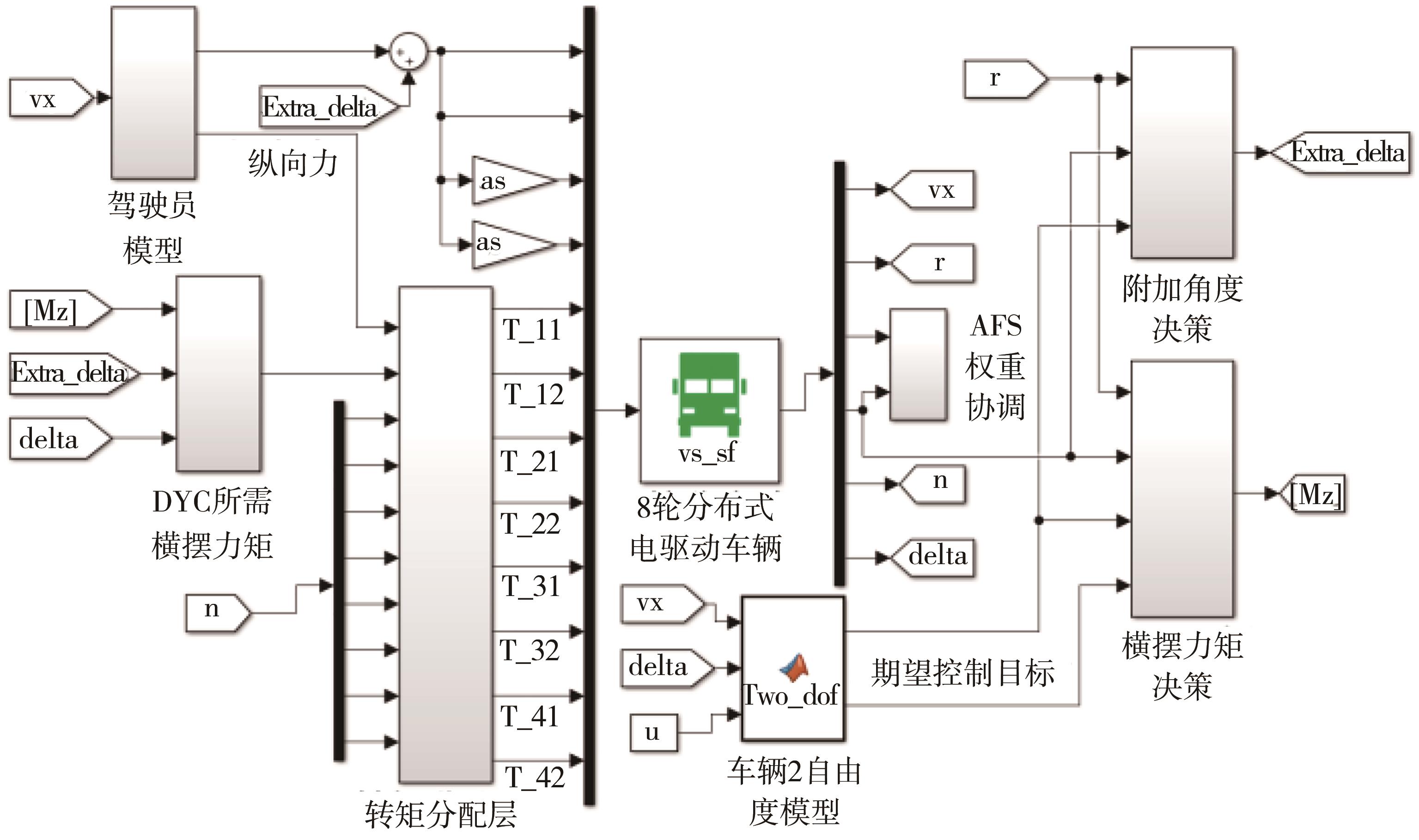
为提高8轮分布式电驱动车辆动力学综合控制性能,提出一种主动前轮转向系统(AFS)和直接横摆力矩系统(DYC)协同控制方法。首先,基于车辆模型求得考虑垂直载荷转移和侧倾稳定性的期望横摆角速度和质心侧偏角。其次,提出一种联合双线法和横摆角速度法的