汽车工程 ›› 2025, Vol. 47 ›› Issue (10): 1847-1860.doi: 10.19562/j.chinasae.qcgc.2025.10.001
• •
许男( ),尹卓,张岳韬,郭孔辉
),尹卓,张岳韬,郭孔辉
Nan Xu(),Zhuo Yin,Yuetao Zhang,Konghui Guo
摘要:
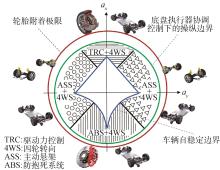
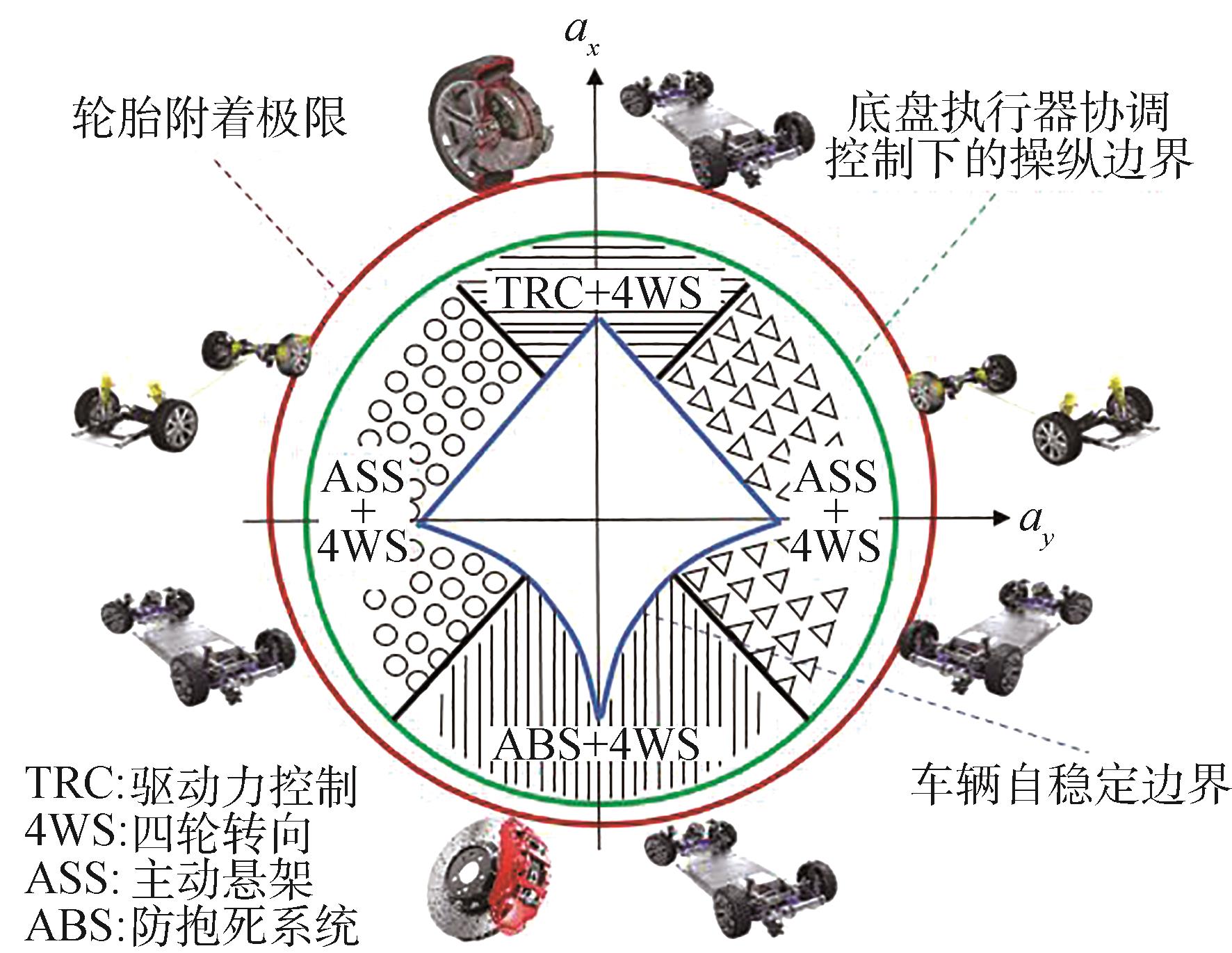
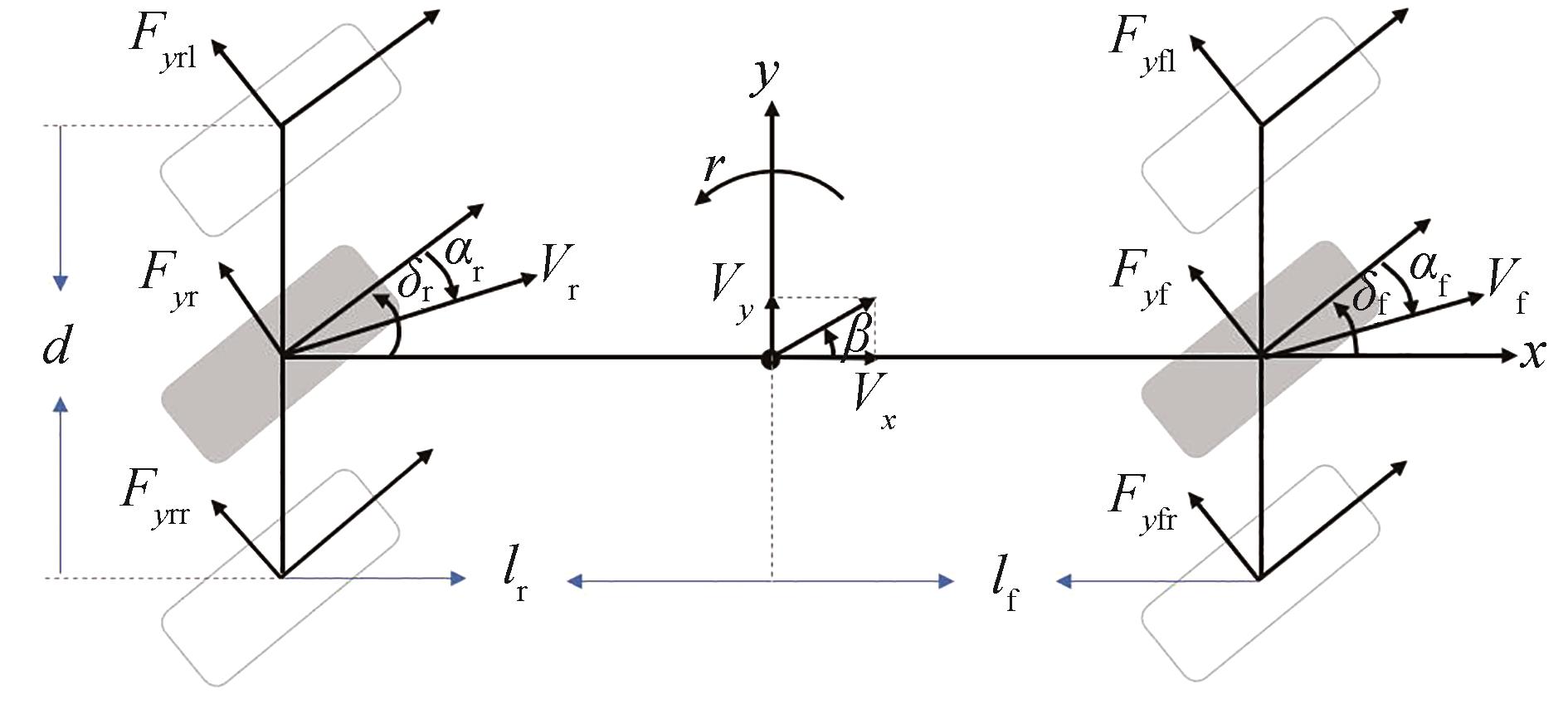
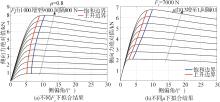
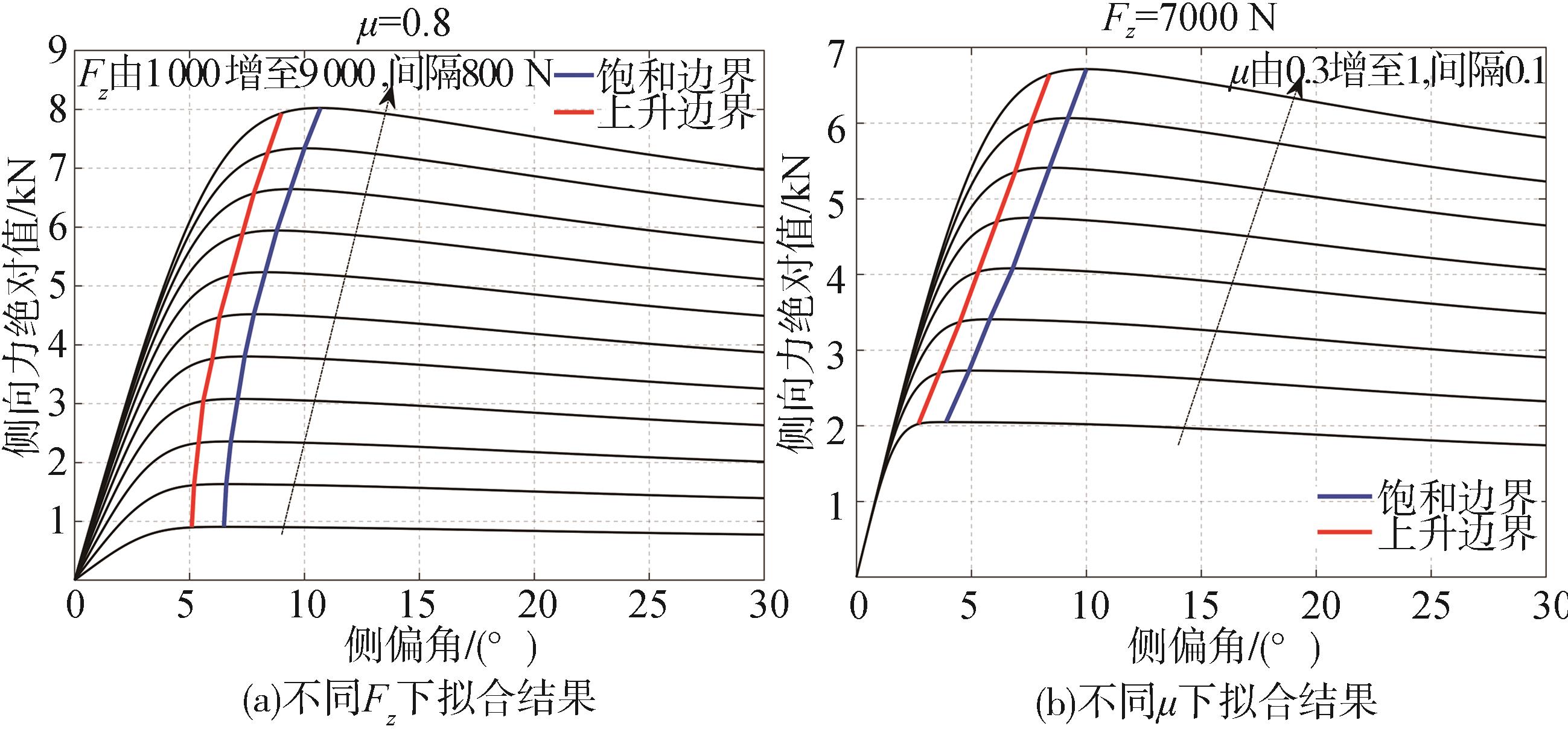
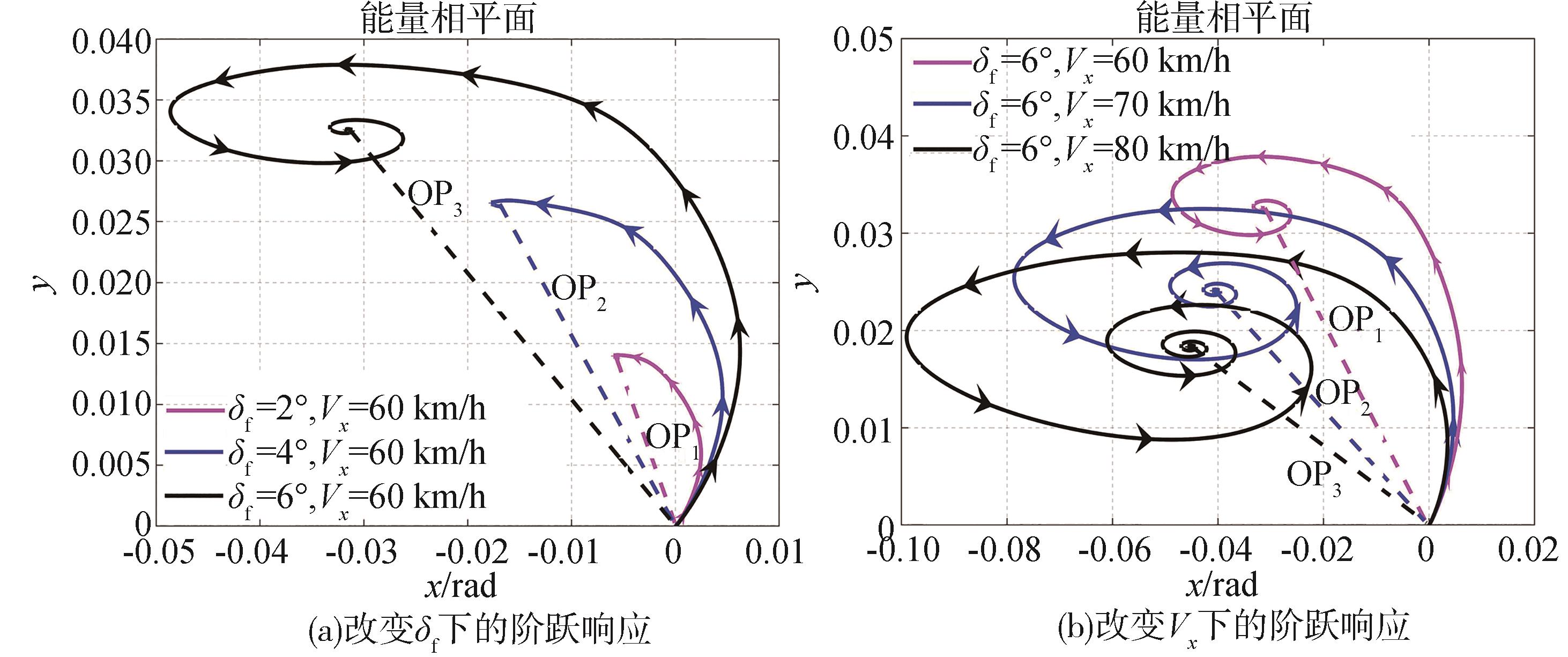
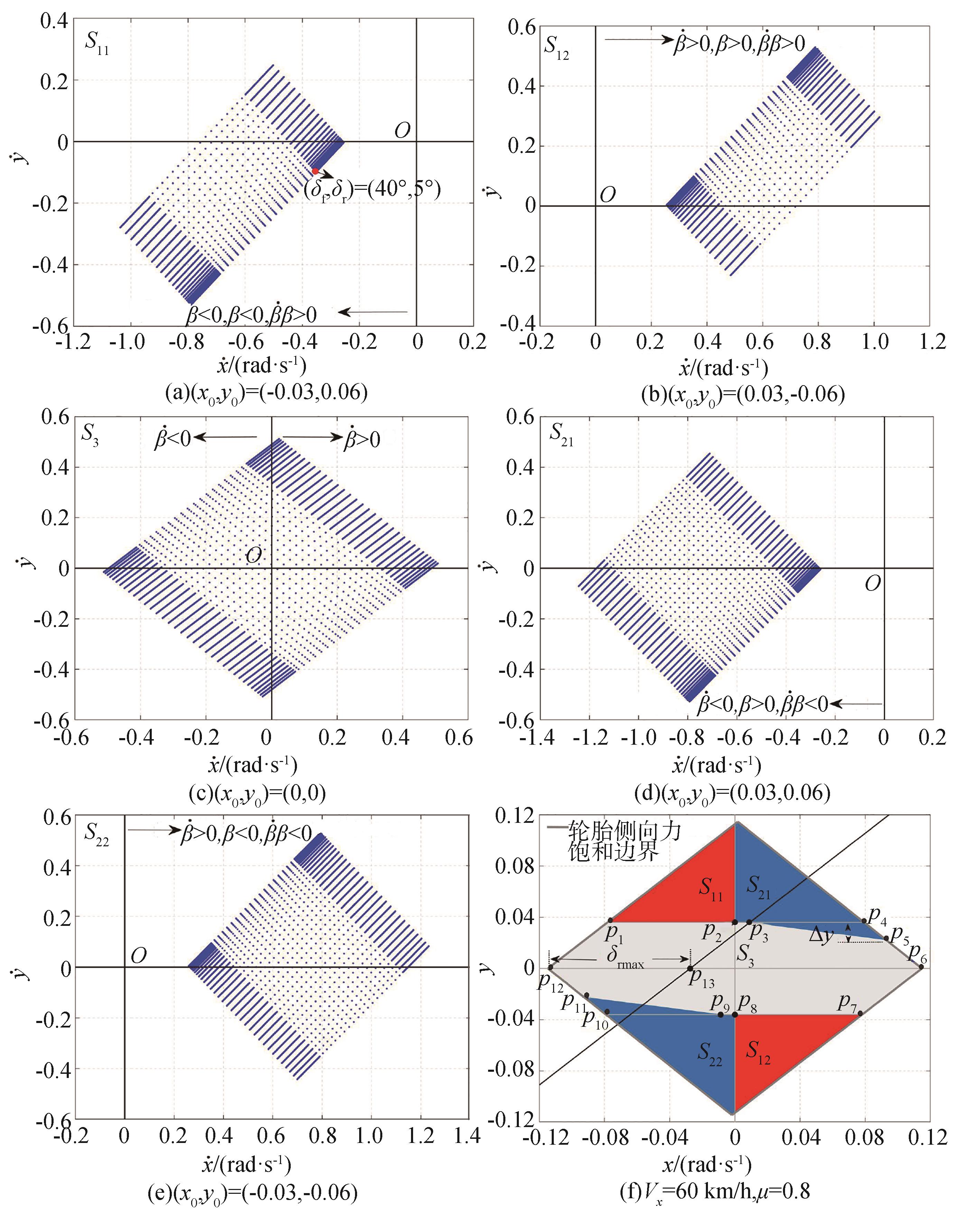
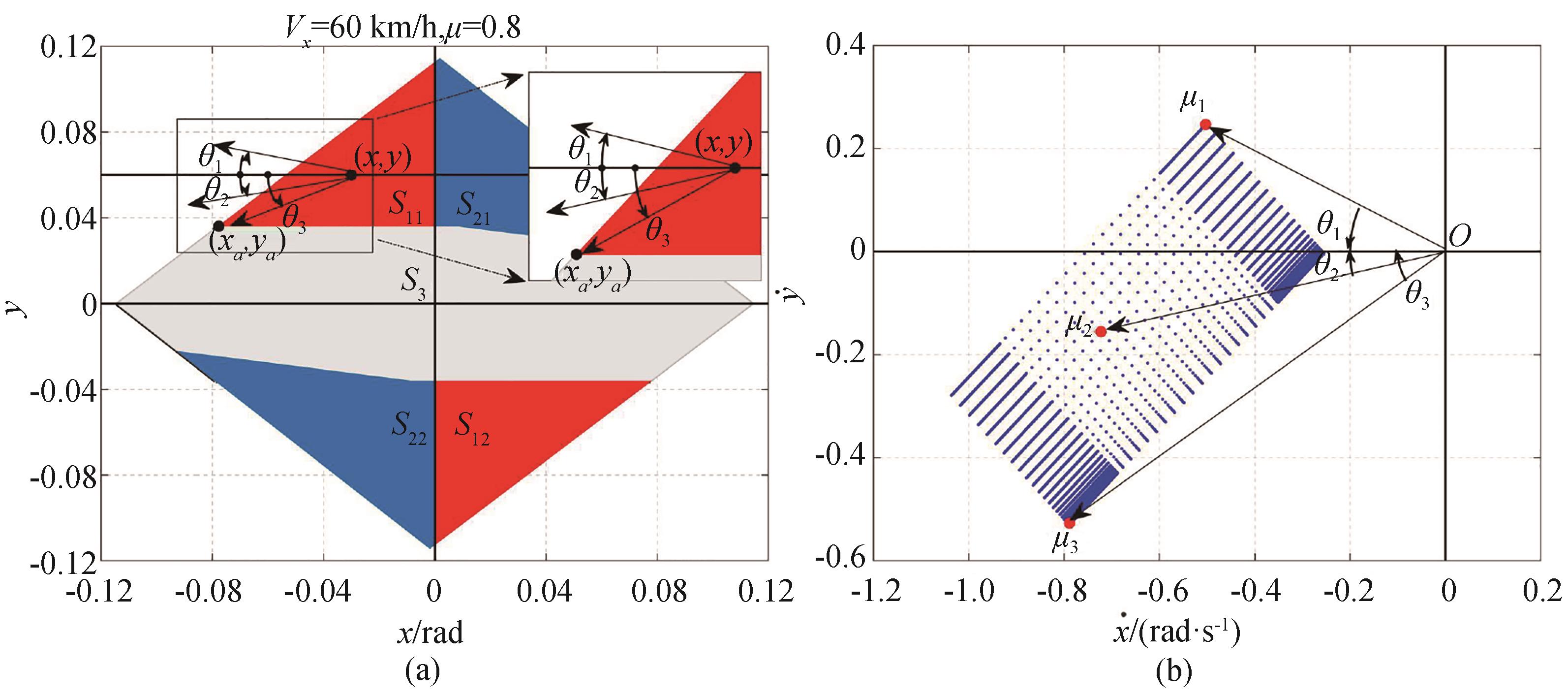
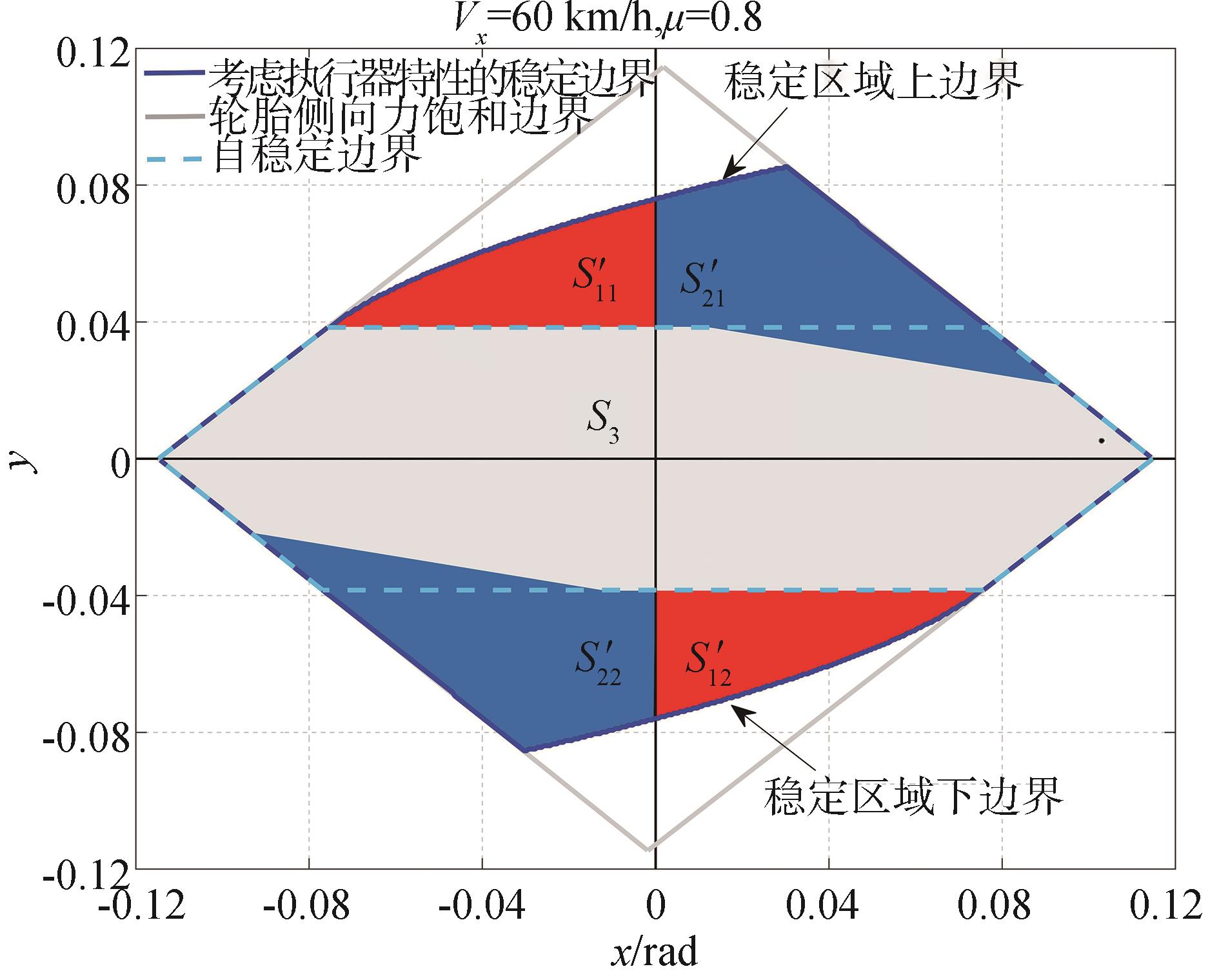
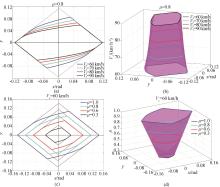
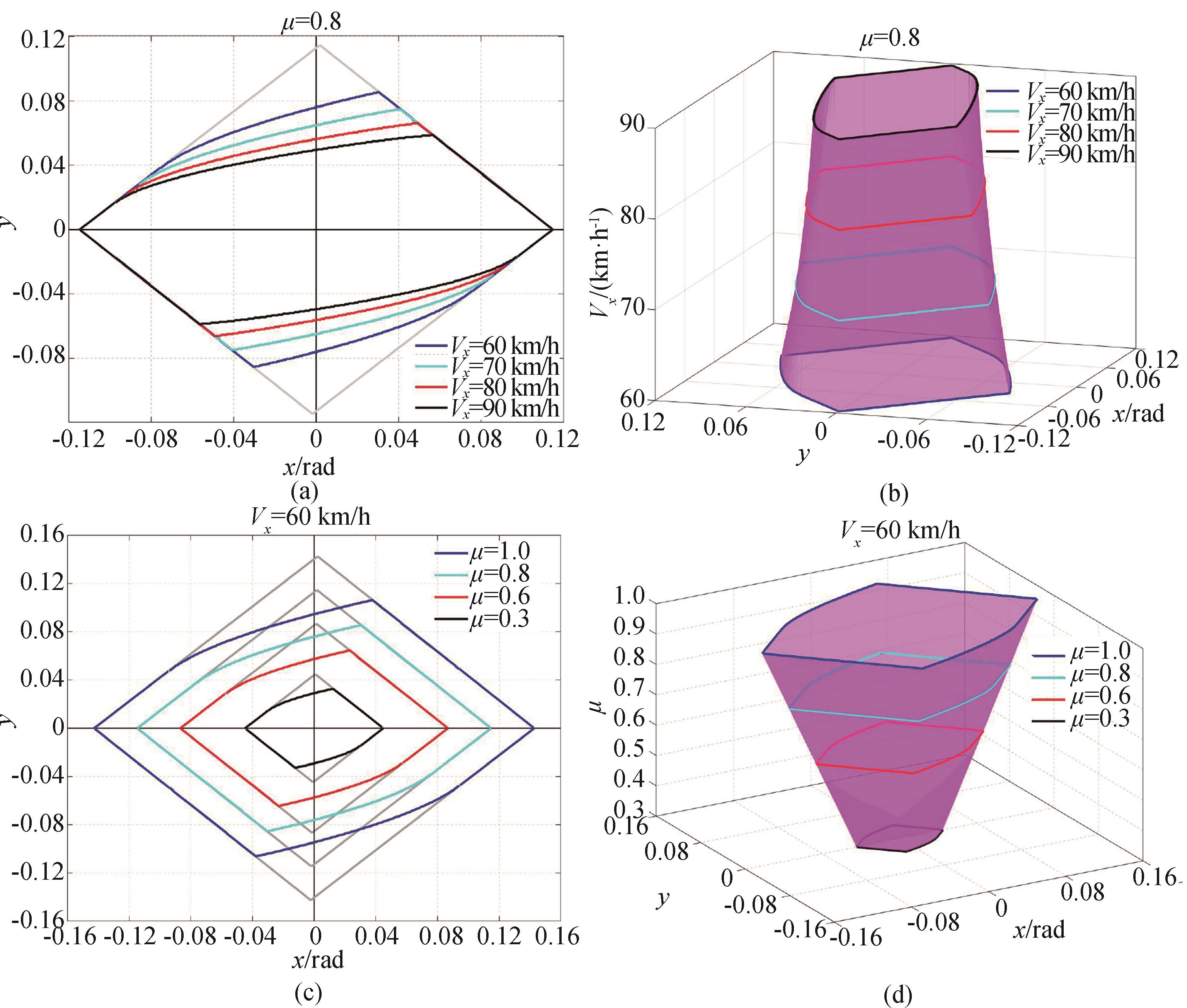
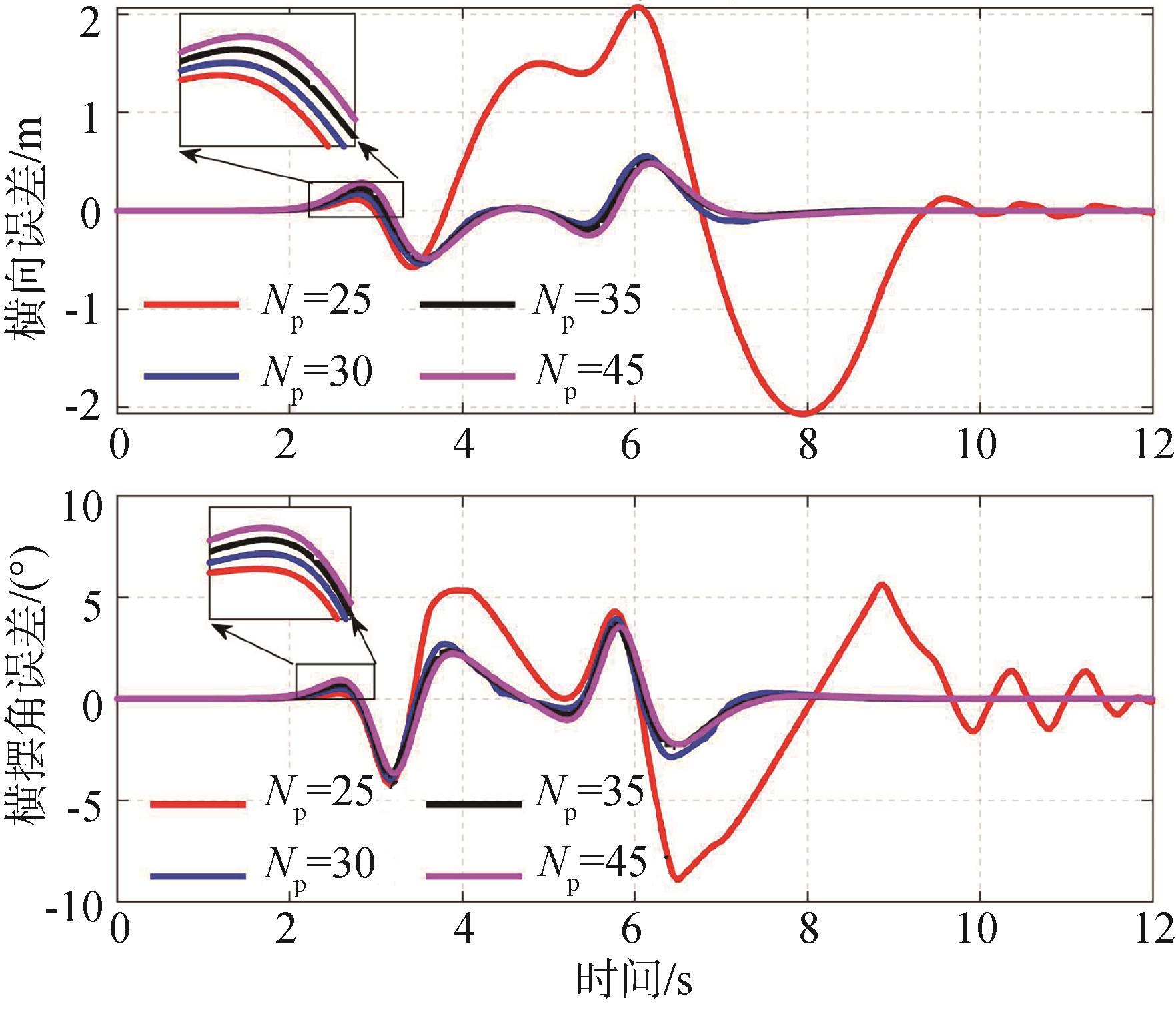
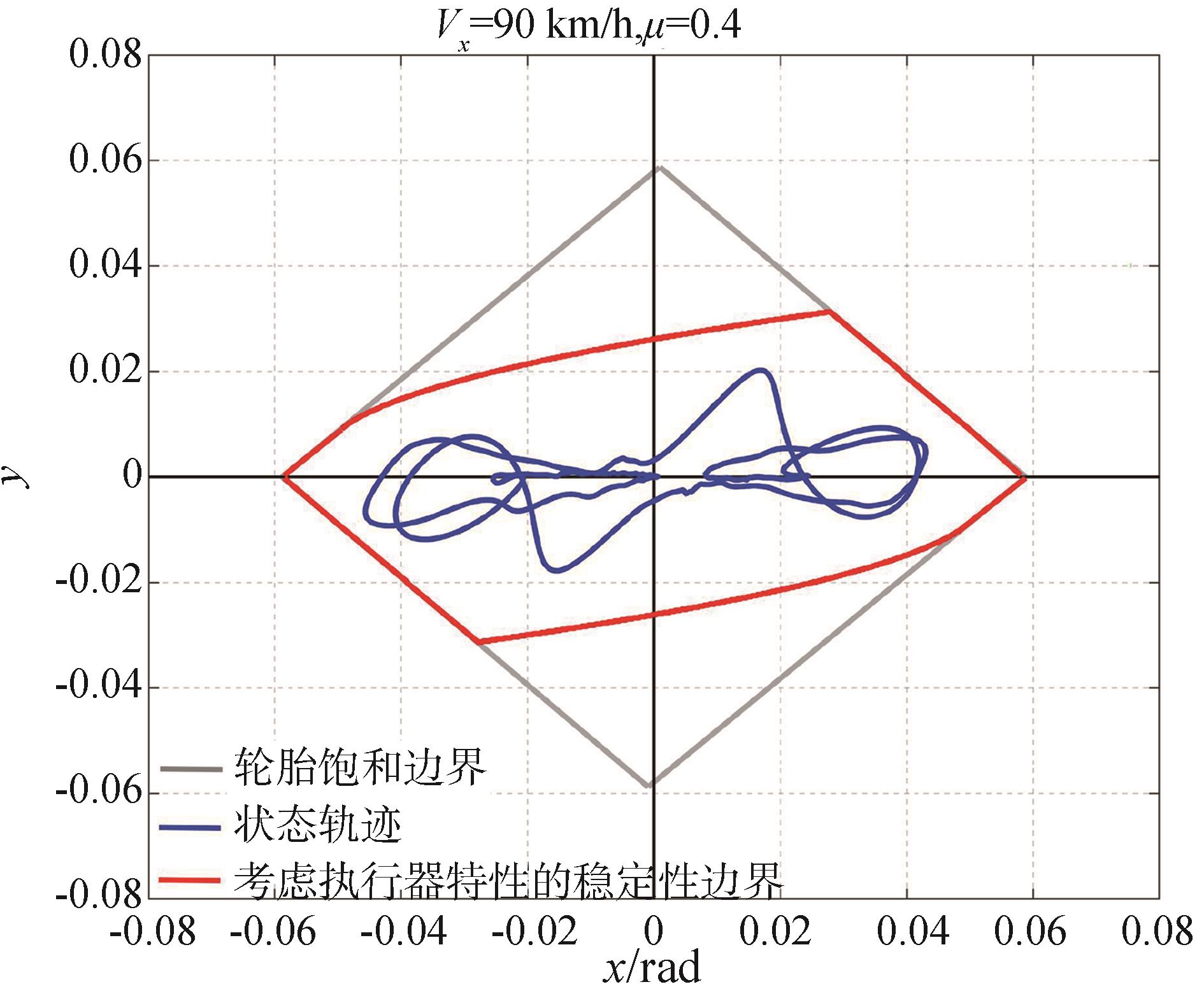
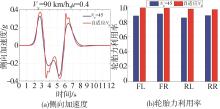
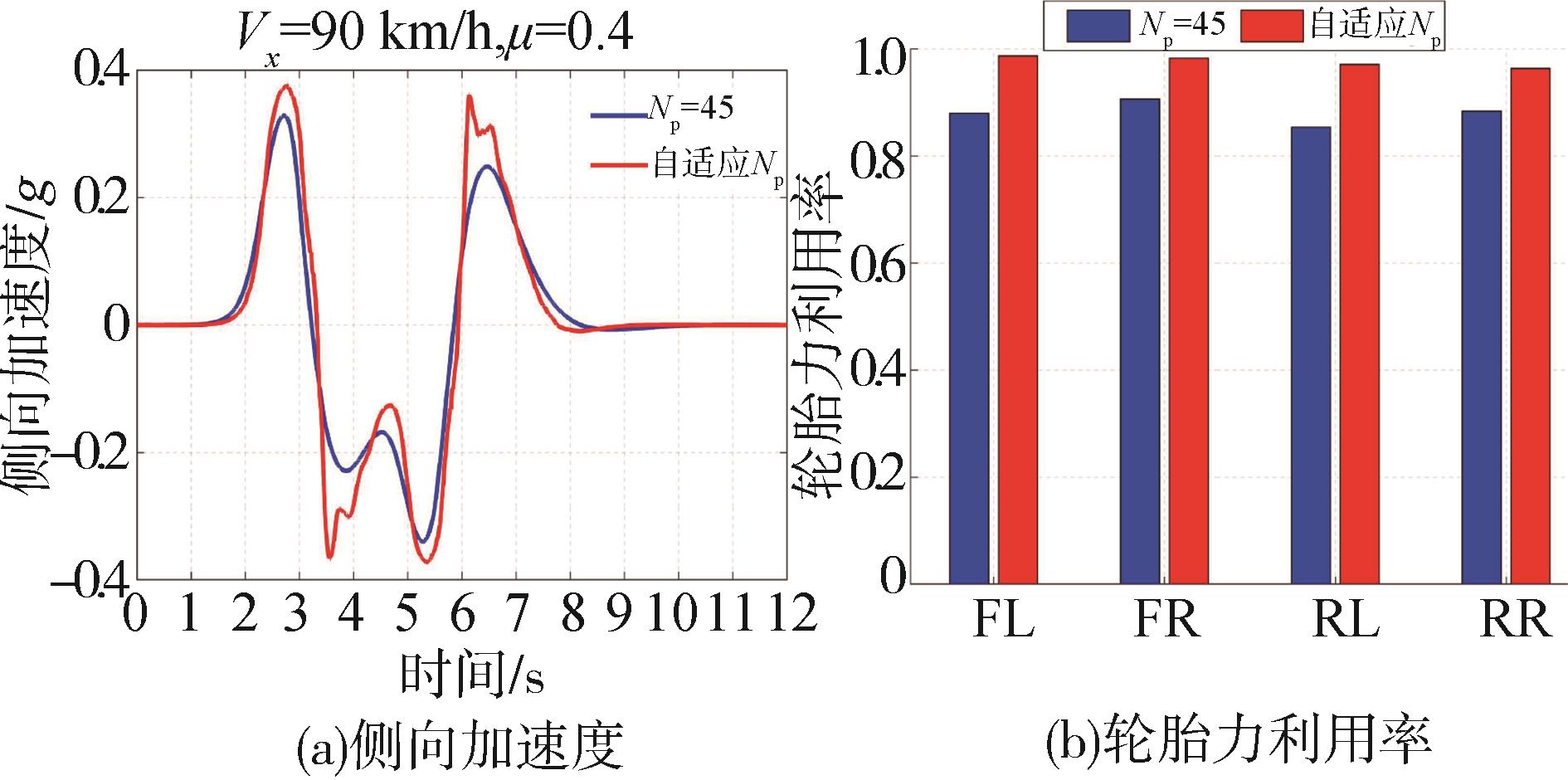
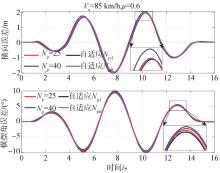
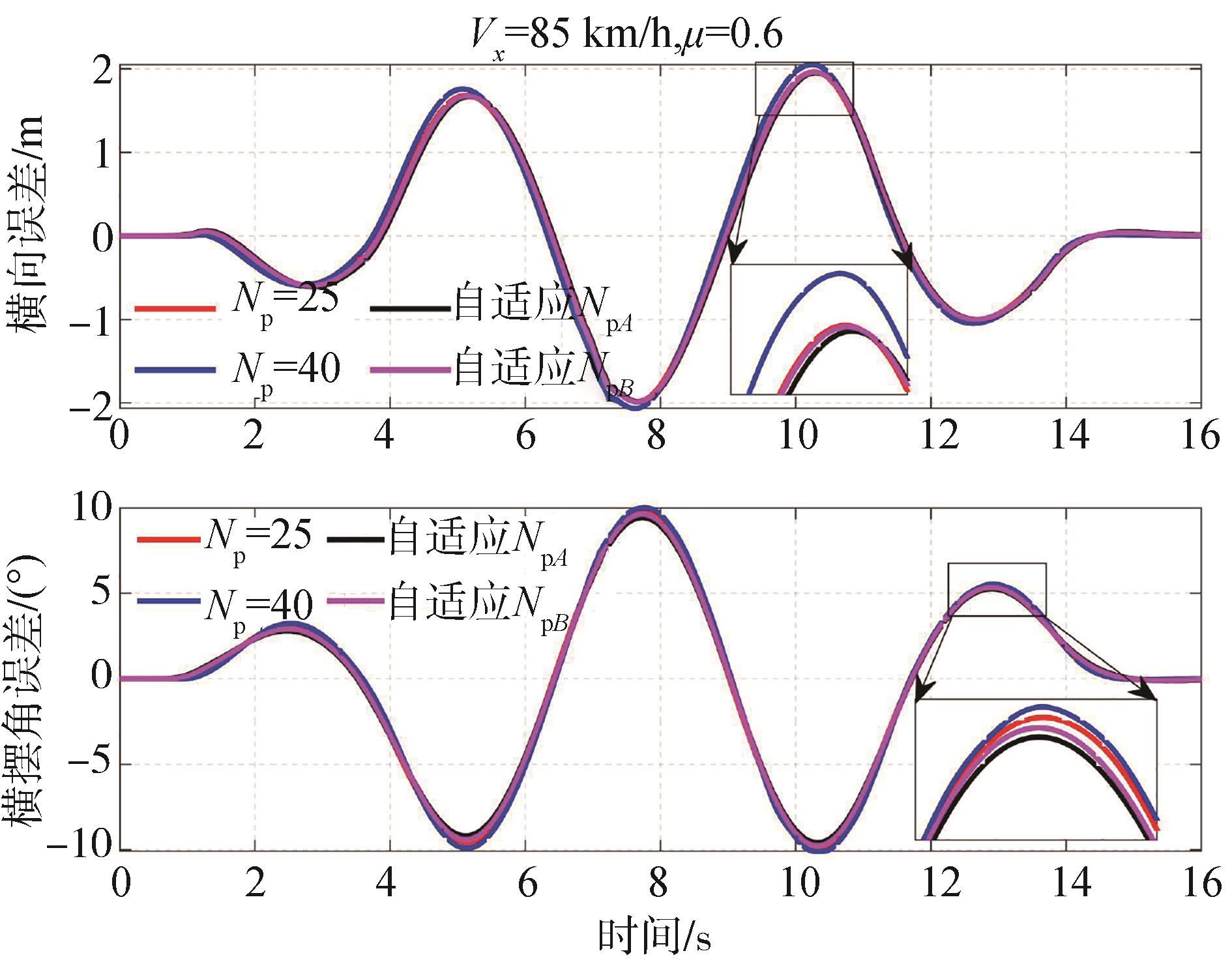
为了充分发挥多执行器底盘在自动驾驶车辆轨迹跟踪控制中的动力学性能,本文提出了一种考虑执行器特性对车辆动力学状态影响的稳定性分析方法,并据此设计了预测时域随稳定裕度自适应变化的模型预测(model predictive control, MPC)轨迹跟踪控制器。针对集成了前后轮主动转向(active front wheel steering- active rear wheel steering, AFS-ARS)的自动驾驶车辆,首先在能量相平面中分析了在执行器影响下的车辆动力学状态变化趋势,结合李雅普诺夫第二法,根据执行器作用下动力学状态变化矢量与前后轮胎力饱和约束的关系确定了一种新型稳定包络边界。然后基于车辆在轨迹跟踪过程中稳定裕度的变化设计了一种自适应预测时域计算方法,结合面向控制的非线性轮胎模型UniTire-Ctrl建立了MPC轨迹跟踪控制器。CarSim-Simulink的联合仿真结果表明,本文提出的新型稳定包络边界更适合考虑执行器特性的车辆稳定边界的估计,并且据此设计的自适应预测时域MPC轨迹跟踪控制器能较好地平衡轨迹跟踪精度与车辆操纵稳定性的关系。