汽车工程 ›› 2024, Vol. 46 ›› Issue (9): 1587-1599.doi: 10.19562/j.chinasae.qcgc.2024.09.006
• • 上一篇
钱立军1( ),陈健1,赵丰2,陈欣宇1,宣亮1
),陈健1,赵丰2,陈欣宇1,宣亮1
Lijun Qian1(),Jian Chen1,Feng Zhao2,Xinyu Chen1,Liang Xuan1
摘要:
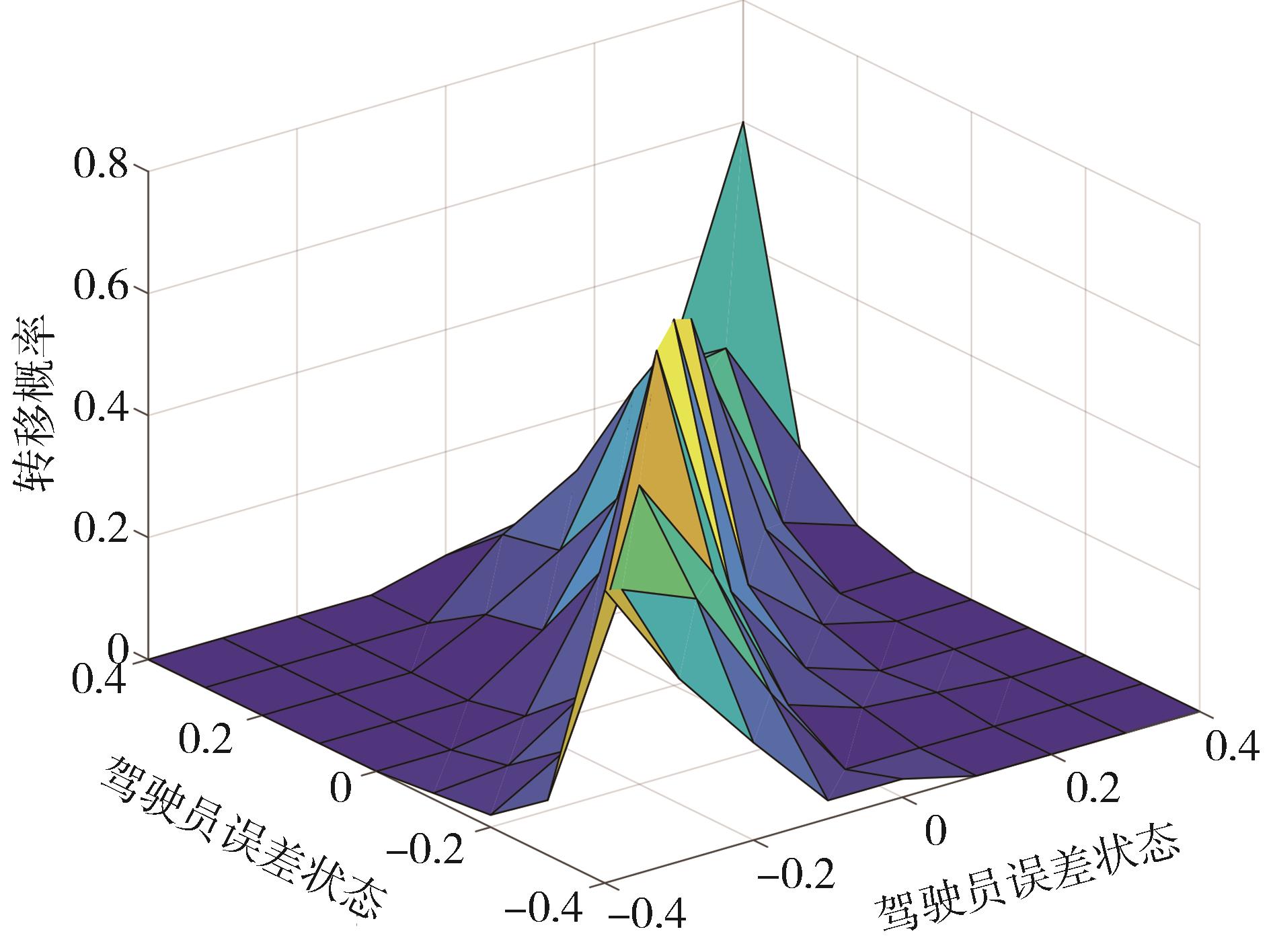
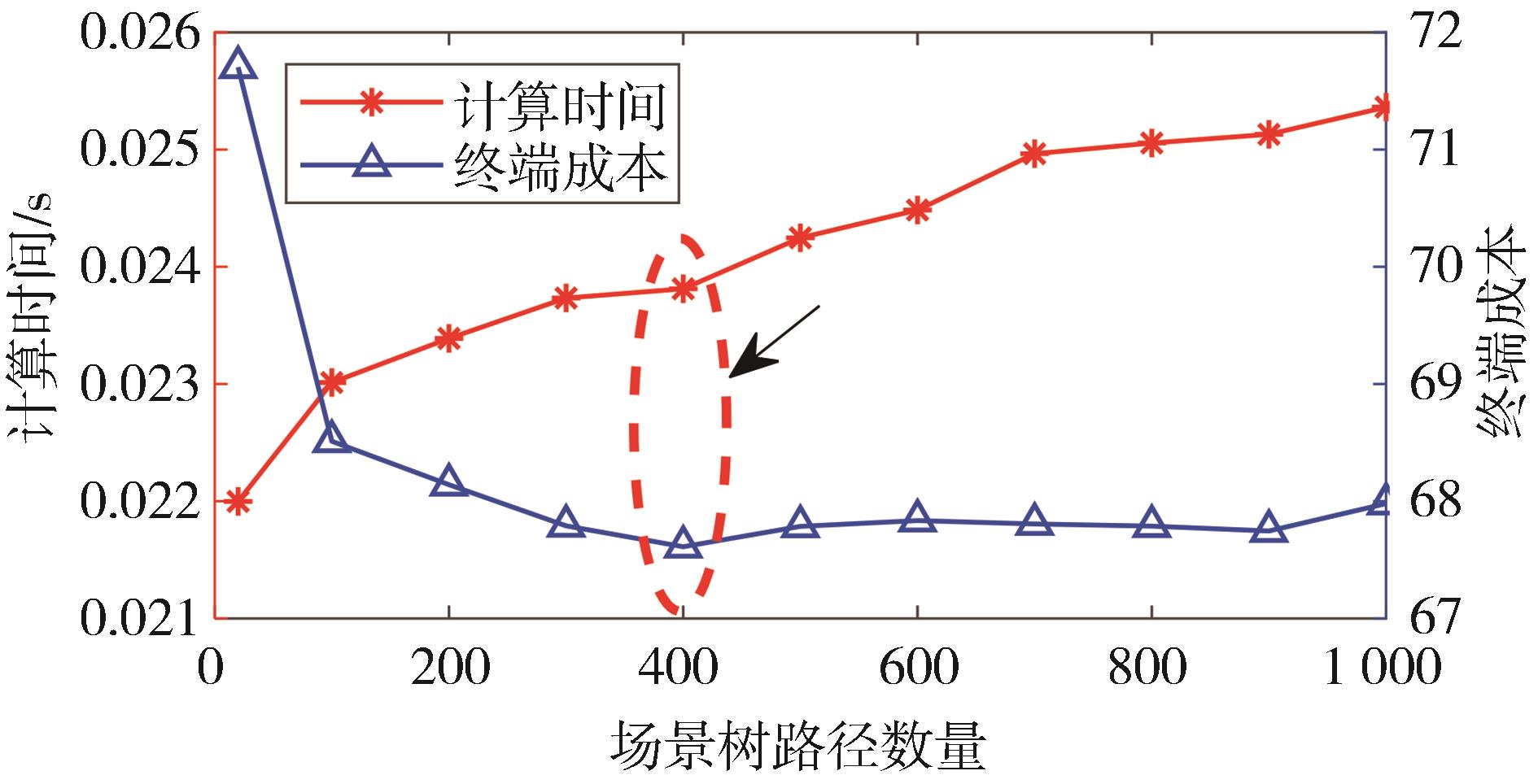
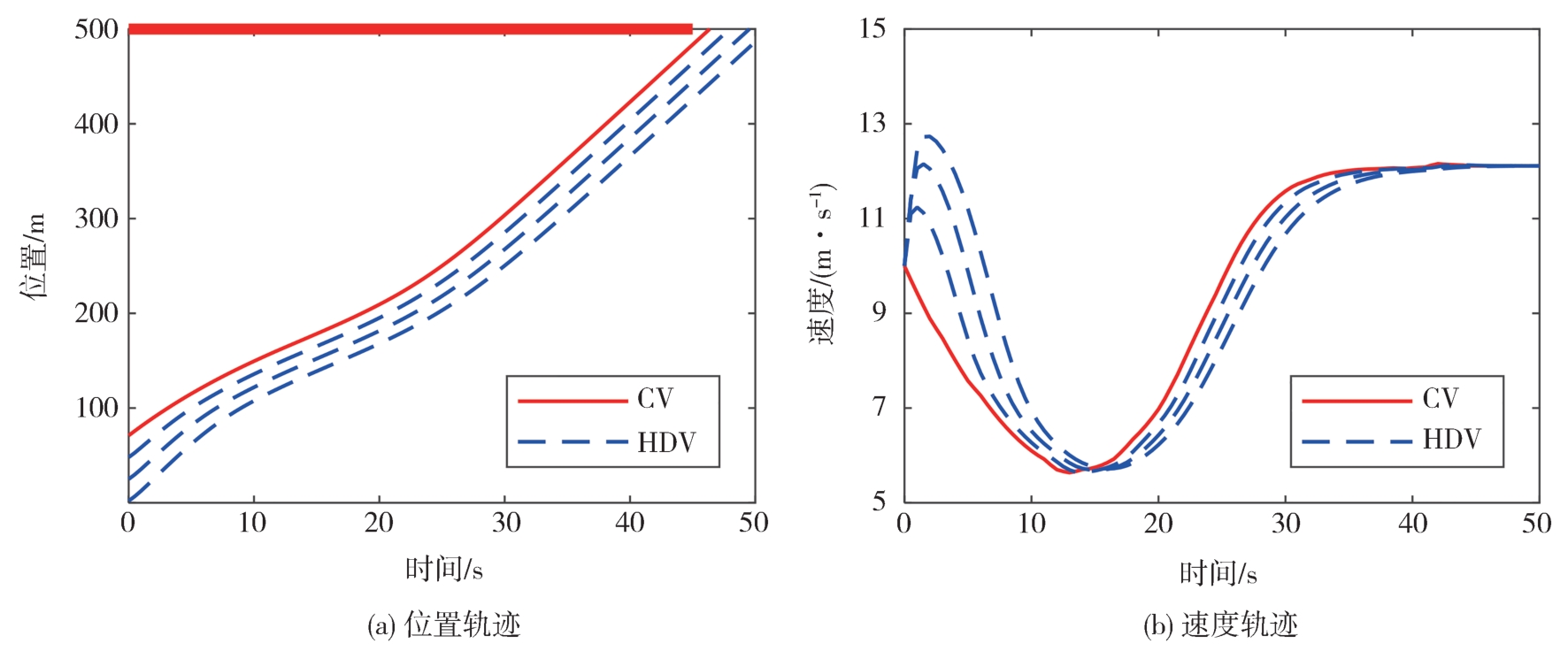
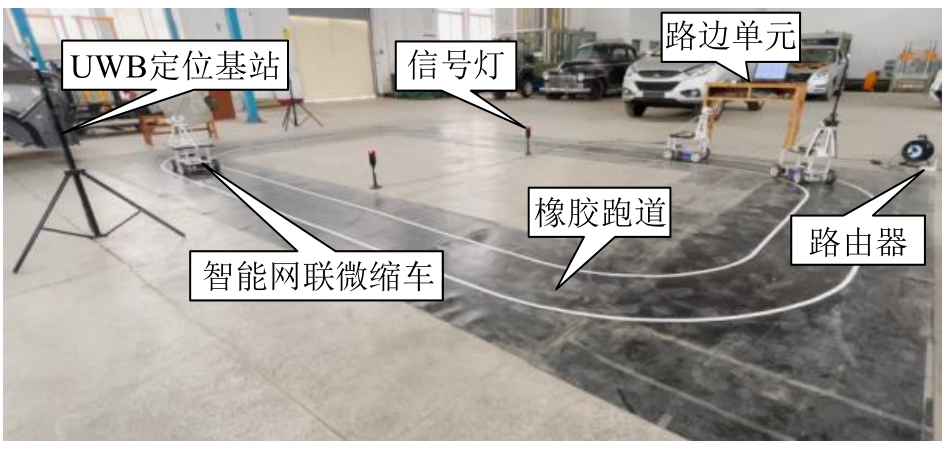
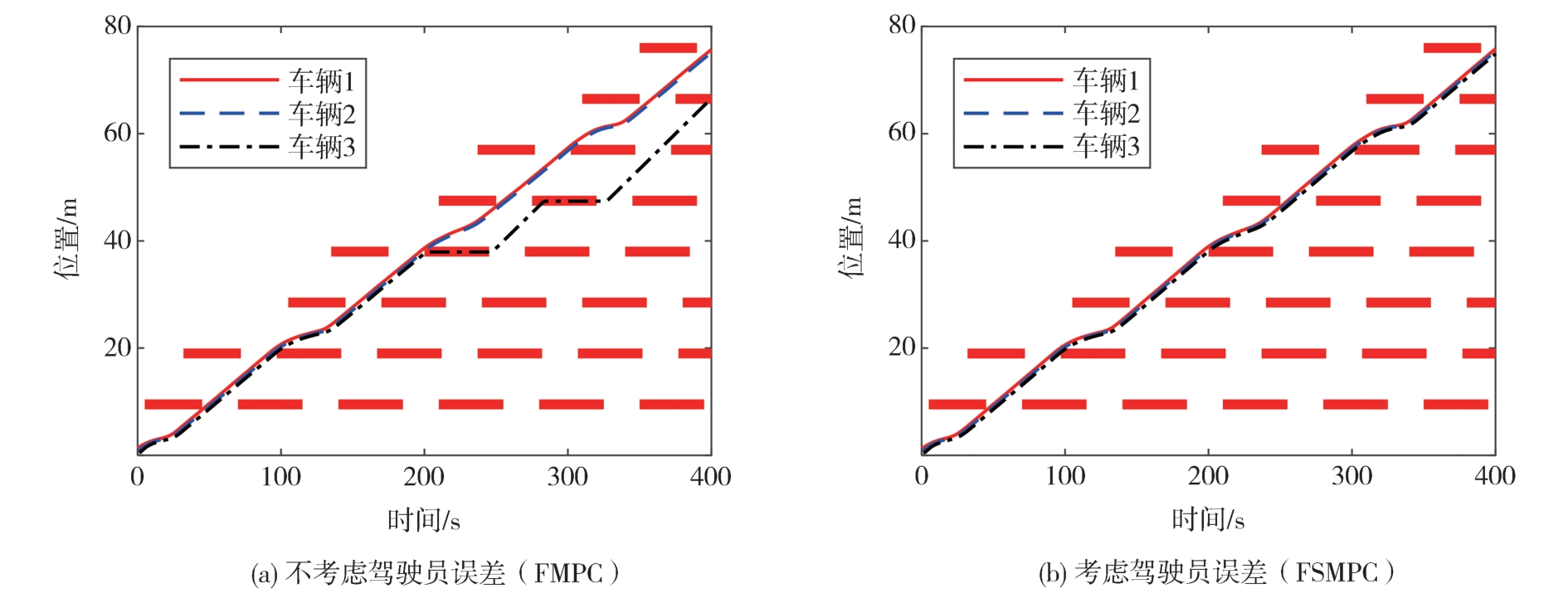
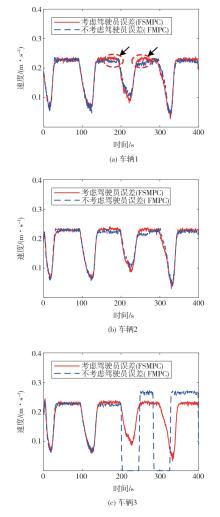
为解决网联汽车由于驾驶员误差存在导致的速度轨迹偏移问题,本文提出一种实时的考虑驾驶员误差的网联混合车队生态驾驶策略。首先通过实车试验采集不同驾驶员的驾驶员误差数据,建立基于马尔可夫链的驾驶员误差模型,用于预测未来一段时间的驾驶员误差。然后以最小化整个车队的燃油消耗为优化目标,将车队速度轨迹优化问题描述为一个最优控制问题,采用快速随机模型预测控制(fast stochastic model predictive control, FSMPC)算法求解车队中网联汽车的最优速度轨迹。仿真和智能网联微缩车试验结果表明,相比于传统的基于快速模型预测控制(fast model predictive control, FMPC)的生态驾驶策略,本文所提出的生态驾驶策略能够有效减小车辆的速度轨迹偏移,并降低整个车队的燃油消耗,且满足实时性要求。