汽车工程 ›› 2024, Vol. 46 ›› Issue (11): 2046-2058.doi: 10.19562/j.chinasae.qcgc.2024.11.011
耿小虎1,付尧1( ),王杰1,雷雨龙1,刘卫东1,王玉海2,刘科1
),王杰1,雷雨龙1,刘卫东1,王玉海2,刘科1
收稿日期:2024-06-02
修回日期:2024-07-09
出版日期:2024-11-25
发布日期:2024-11-22
通讯作者:
付尧
E-mail:fu_yao@jlu.edu.cn
基金资助:
Xiaohu Geng1,Yao Fu1(),Jie Wang1,Yulong Lei1,Weidong Liu1,Yuhai Wang2,Ke Liu1
Received:2024-06-02
Revised:2024-07-09
Online:2024-11-25
Published:2024-11-22
Contact:
Yao Fu
E-mail:fu_yao@jlu.edu.cn
摘要:
预见性巡航控制(predictive cruise control,PCC)在规划层以预测节能为目标进行长时域的速度规划,执行层对规划速度进行短时域的跟踪控制。由于规划层与执行层有着不同时间尺度步长要求,在系统设计中很难将二者置于一个优化控制问题中。因此,本文采用分层控制思想,在规划层基于改进的双延迟深度确定性策略梯度算法(twin delayed deep deterministic policy gradient algorithm,TD3)获得预测时域内长周期的规划速度;在执行层基于模型预测控制(model predictive control,MPC)以规划速度为参考速度,同时考虑发动机油耗特性和变速器换挡规律,对规划速度在短时域内作进一步的经济性优化,并进行跟踪控制。硬件在环验证结果表明,将改进的TD3与MPC相结合可以改善PCC在规划与执行中的时间尺度不一致问题,并有效降低重型商用车在巡航过程中的燃油消耗量和换挡频次。
耿小虎,付尧,王杰,雷雨龙,刘卫东,王玉海,刘科. 考虑不同时域的商用车预见性巡航控制[J]. 汽车工程, 2024, 46(11): 2046-2058.
Xiaohu Geng,Yao Fu,Jie Wang,Yulong Lei,Weidong Liu,Yuhai Wang,Ke Liu. Predictive Cruise Control for Commercial Vehicles Considering Different Time Domains[J]. Automotive Engineering, 2024, 46(11): 2046-2058.
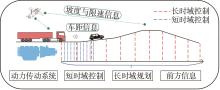
图1
不同时域下的PCC速度规划与控制问题示意图"
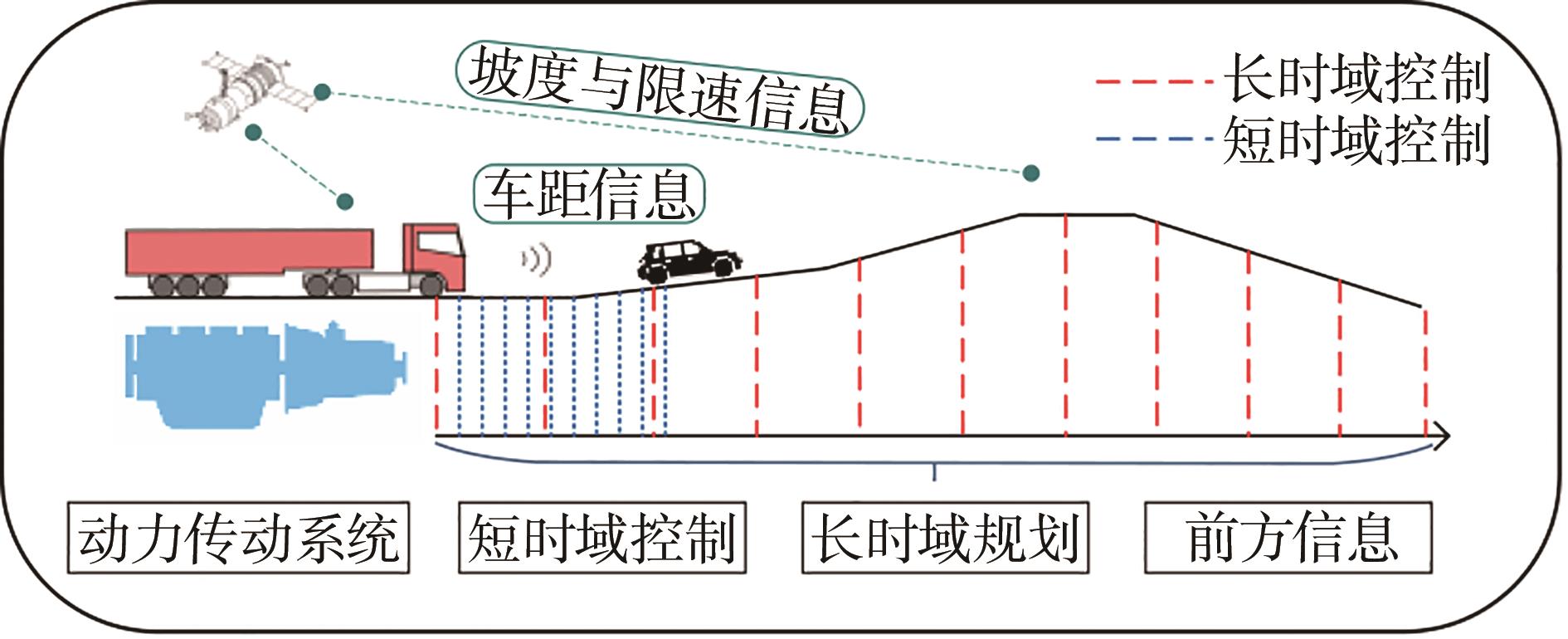

图2
考虑不同时域的预见性巡航系统架构"
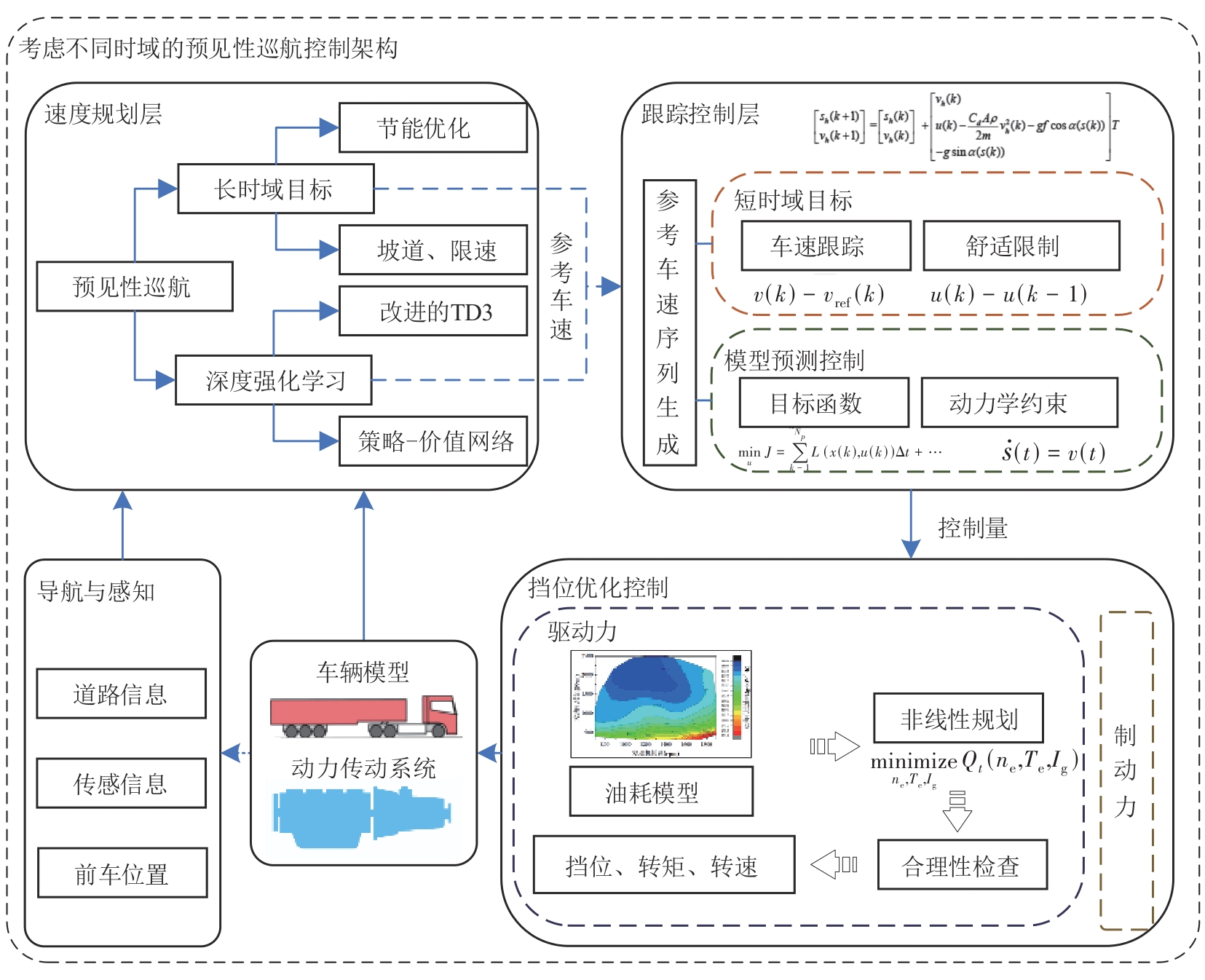

图3
发动机负荷特性曲线"
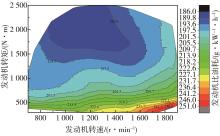
图4
发动机万有特性"

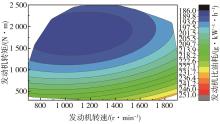
图5
发动机万有特性拟合"


图6
万有特性拟合误差"
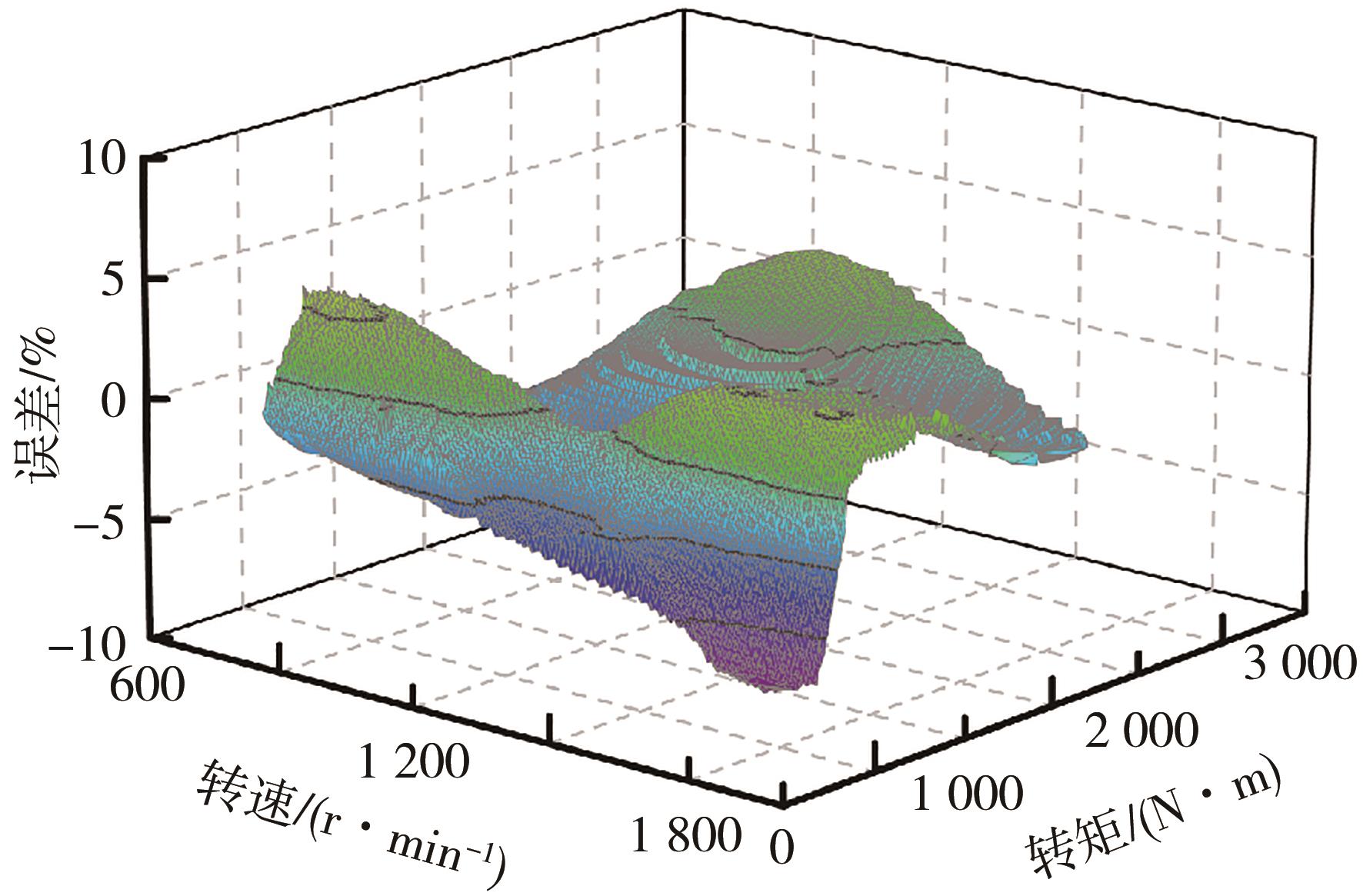

图7
经济性升挡曲线"
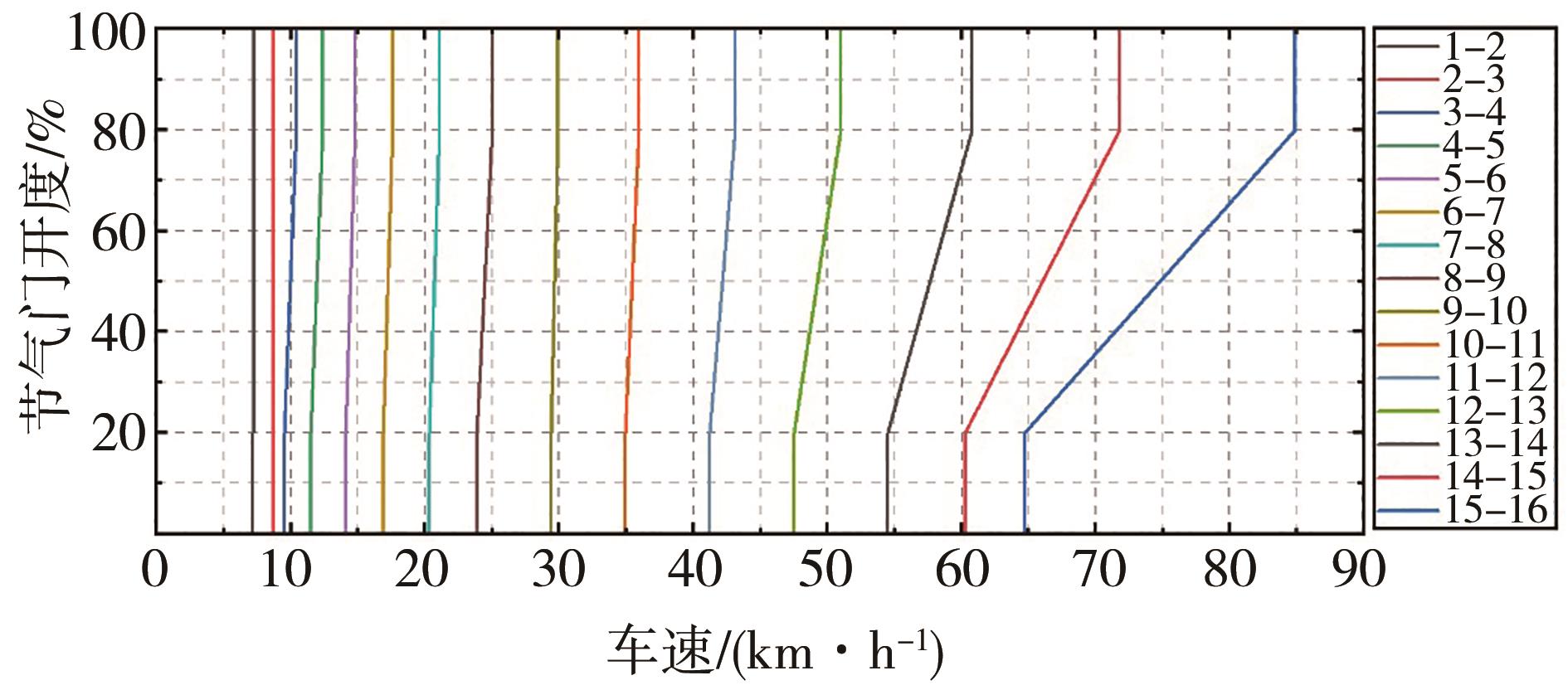

图8
经济性降挡曲线"
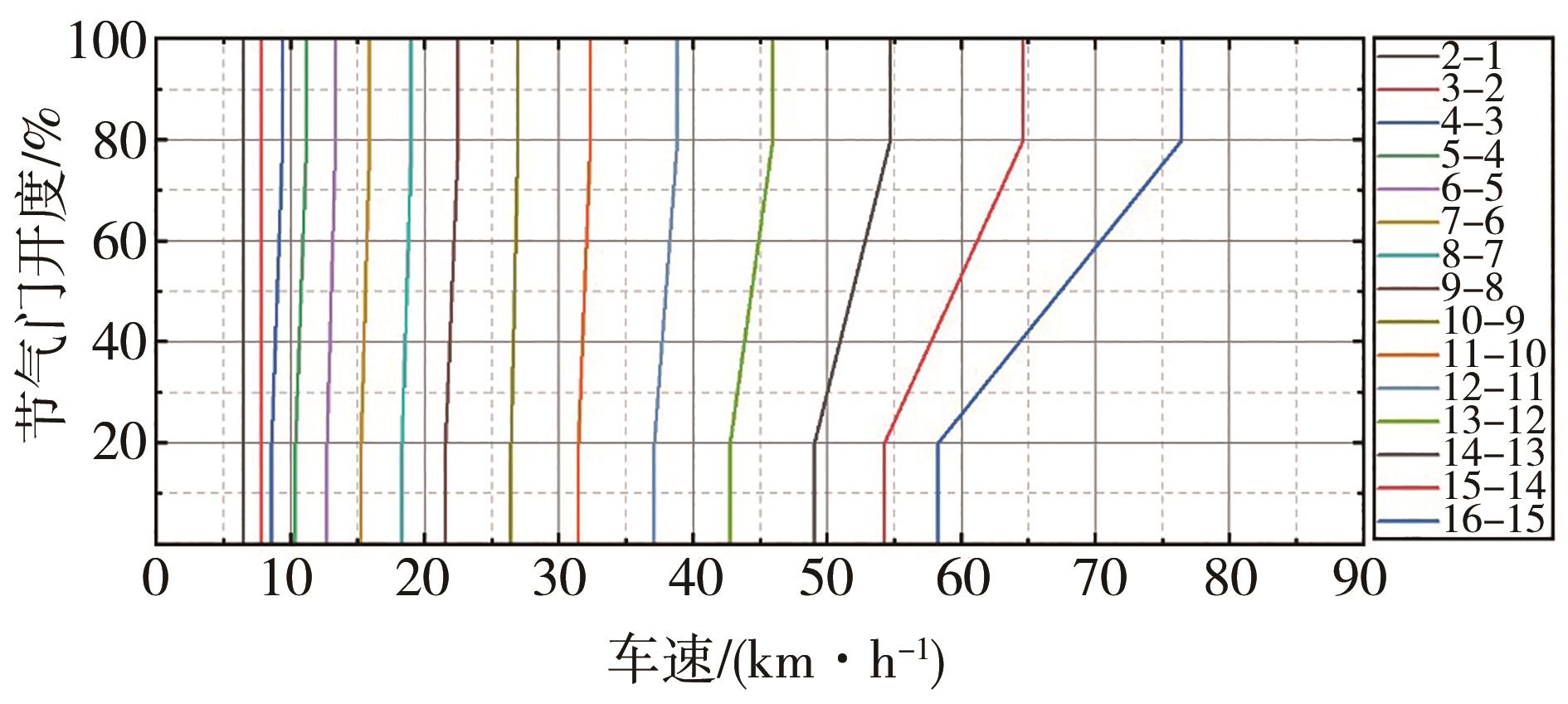
图9
改进的TD3算法示意图"
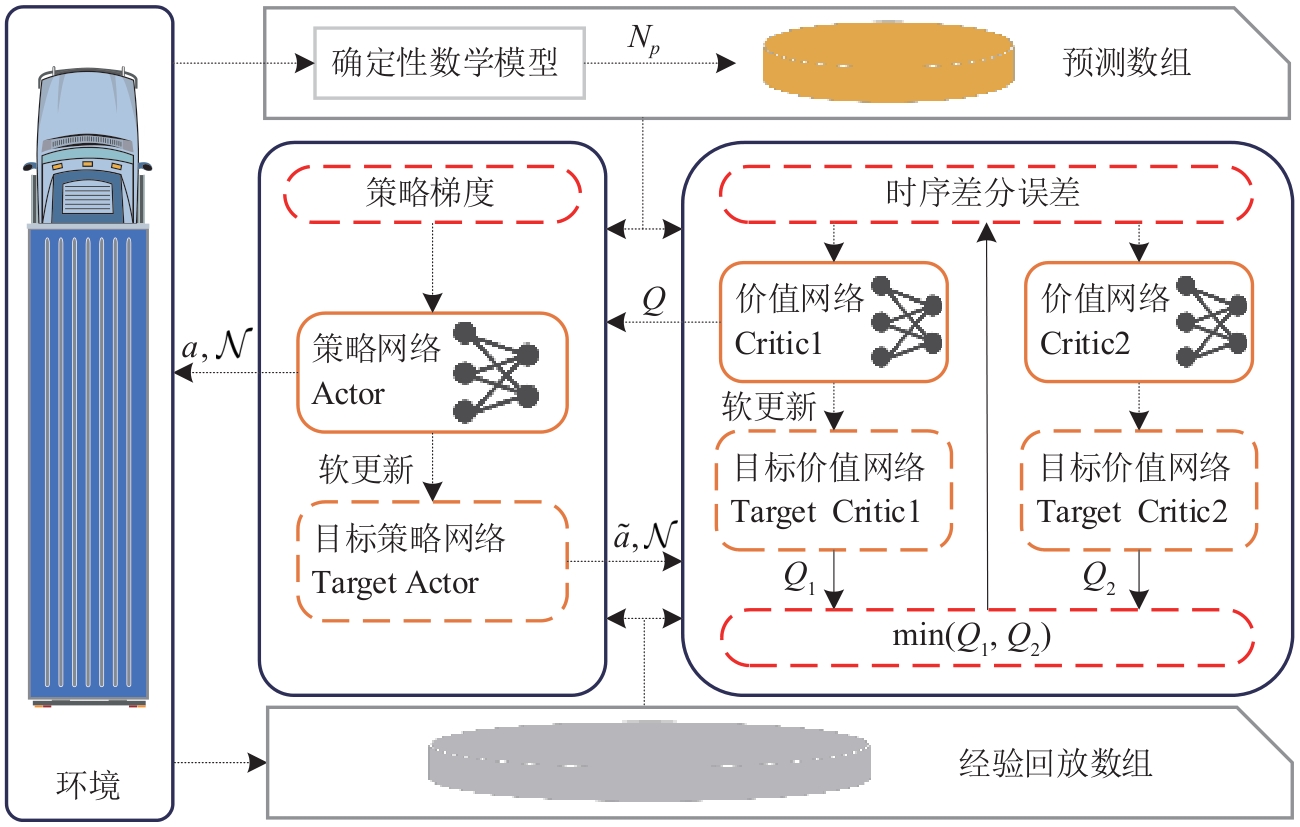

图10
预测方式示意图"
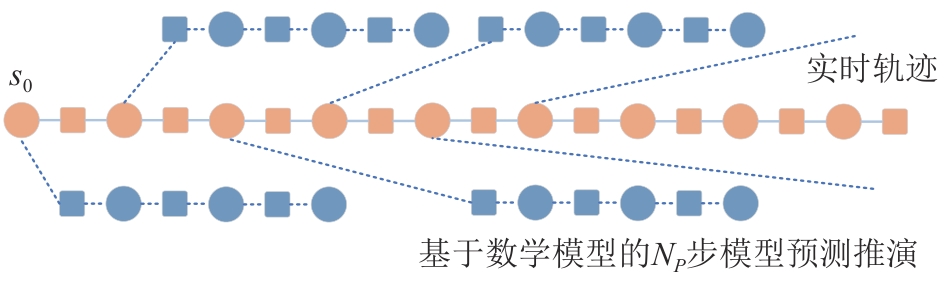

图11
策略网络结构"
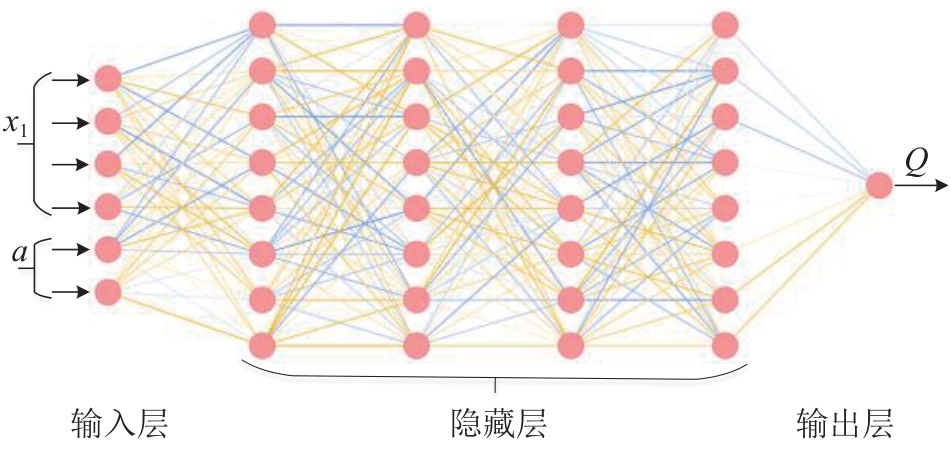

图12
价值网络结构"
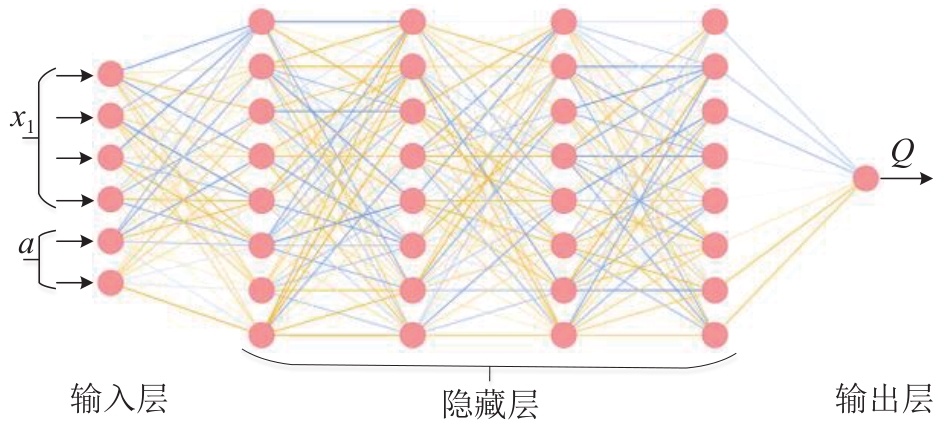
图13
PCC预测时域内的速度规划与轨迹拼接"
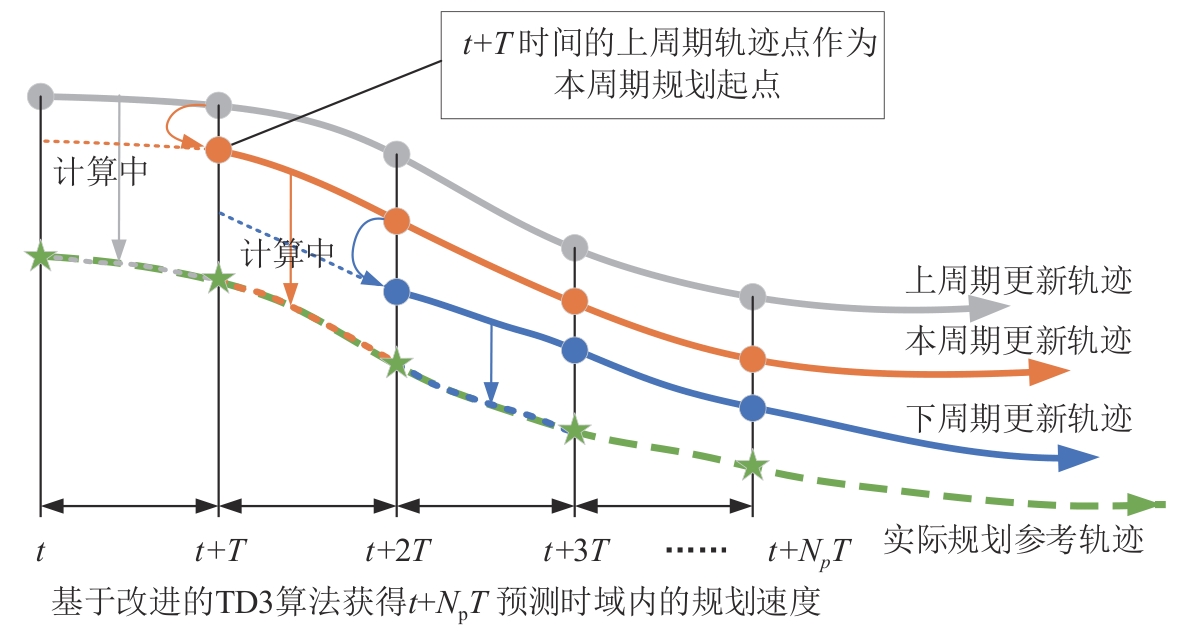
表1
参考速度序列生成"
| 参考速度序列生成 |
|---|
| End for |

图14
规划层与执行层不同时间尺度示意图"
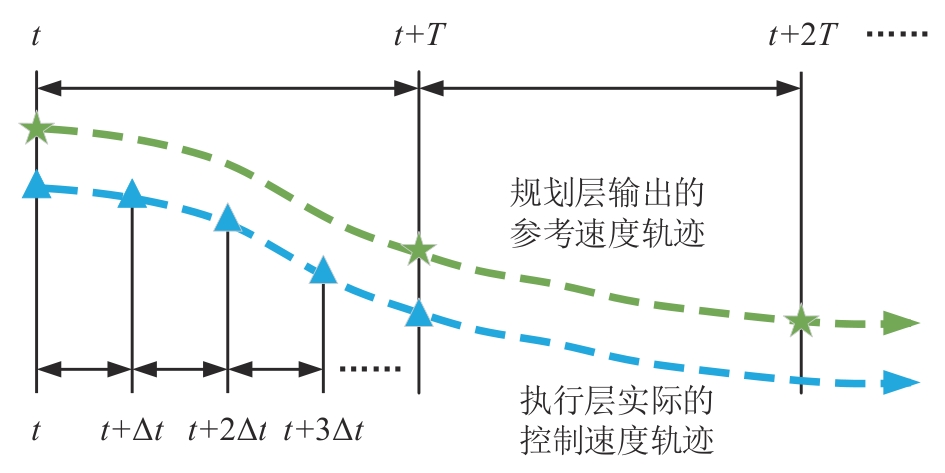
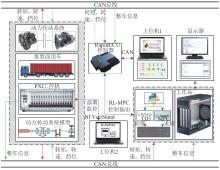
图15
仿真平台架构图"


图16
硬件在环测试平台"

表2
策略与价值网络参数"
| 参数 | 数值或设置 | |
|---|---|---|
| 策略网络 | 价值网络 | |
| 输入层维度 | 3 | 4 |
| 隐藏层1和2 | 128/无 | 128/128 |
| 输出层 | 1 | 1 |
| 隐藏层激活函数 | ReLU | ReLU |
| 输出层激活函数 | tanh | tanh |
| 优化器 | Adam | Adam |
表3
改进的TD3算法参数设置"
| 参数 | 数值或设置 |
|---|---|
| 策略网络学习率 | 5e-4 |
| 价值网络学习率 | 5e-3 |
| 回报衰减率 | 0.98 |
| 软更新参数 | 0.000 5 |
| 经验回放数组维度 | 10 000 |
| 训练最小经验回放维度 | 1 000 |
| 单次更新采样经验回放数组 | 64 |
| 预测数组 | 200 |
| 单次更新采样预测数组 | 20 |
| OU噪声标准差/均值 | 0.15/0 |
| OU噪声回归系数 | 0.15 |

图17
速度正弦工况MPC车速跟踪和挡位位置"


图18
HHDDT工况MPC车速跟踪和挡位位置"


图19
“上下坡”工况训练回报曲线"
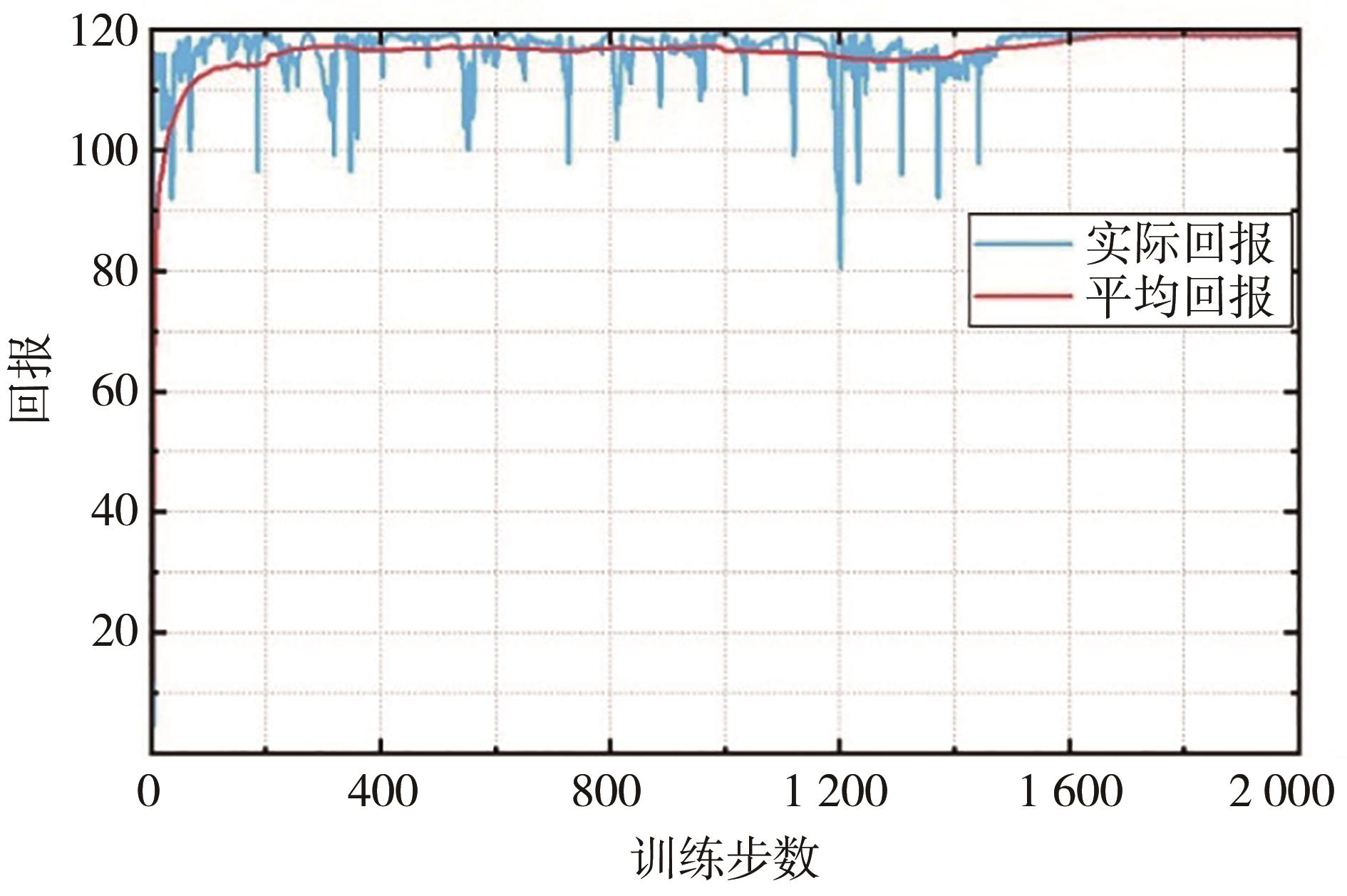
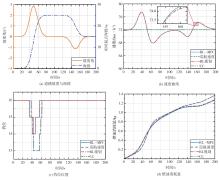
图 20
平路后“上下坡”工况仿真"

图 21
“上下坡”工况仿真RL-MPC发动机工作点"

表4
平路后上坡仿真数据对比"
| 项目 | CC | RL规划 | RL-MPC |
|---|---|---|---|
| 燃油消耗/kg | 1.368 | 1.283 | 1.268 |
| 换挡次数 | 6 | 4 | 4 |
| 行驶距离/m | 3 999.99 | 4 004.09 | 4 004.09 |

图22
青岛平度市郊区的快速路路段"

图23
真实道路工况仿真"


图 24
真实道路工况仿真RL-MPC发动机工作点"
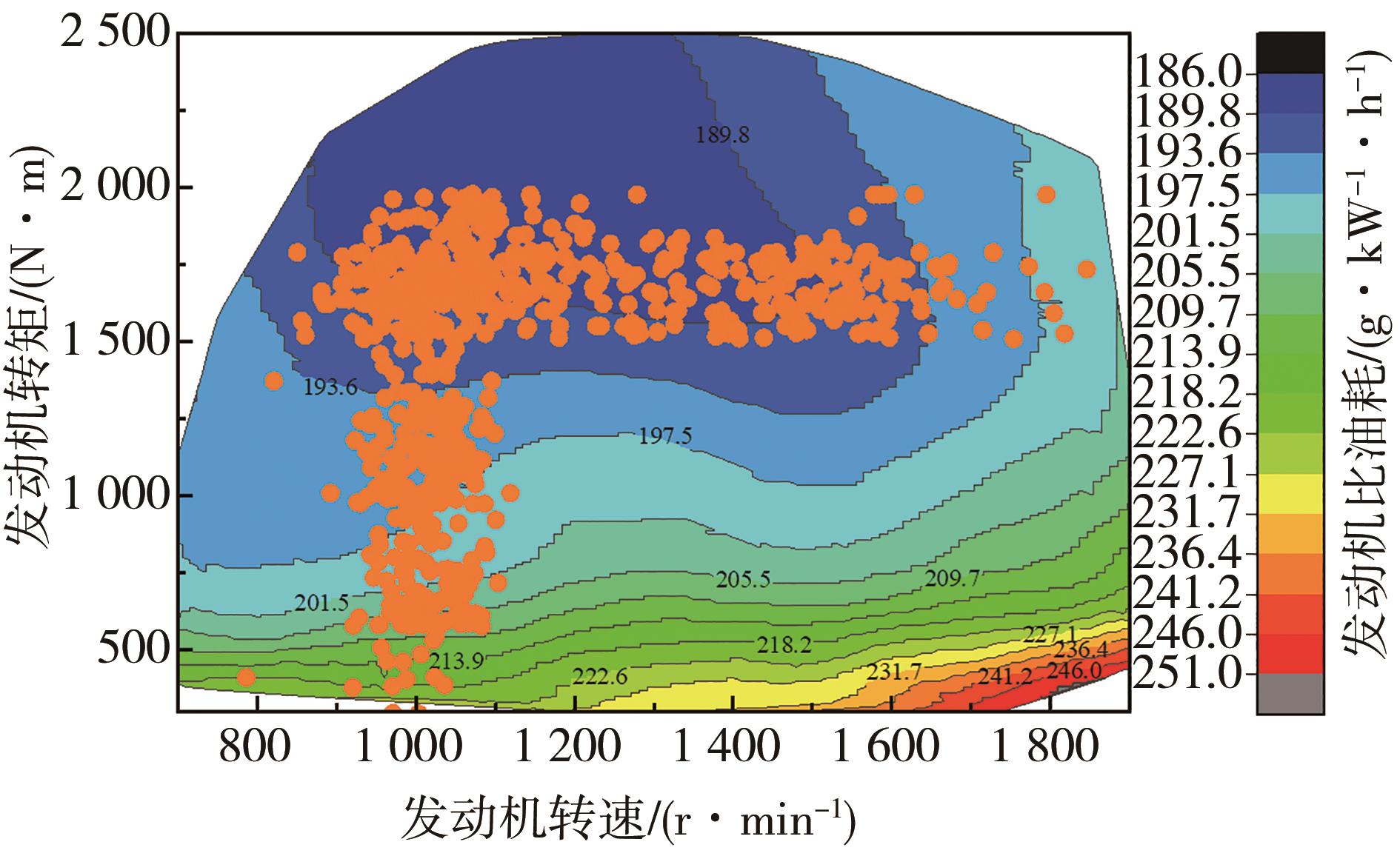
表5
真实道路工况仿真数据对比"
| 算法 | CC | RL规划 | RL-MPC |
|---|---|---|---|
| 燃油消耗/kg | 9.525 | 8.573 | 8.232 |
| 换挡次数 | 118 | 62 | 51 |
| 行驶距离/m | 26 500 | 26 500 | 26 500 |
| 1 | 徐向阳, 赵俊玮, 董鹏, 等. 双碳目标下商用车动力传动系统技术特征与展望 [J]. 汽车安全与节能学报, 2023, 14(4): 395-412. |
| XU X Y, ZHAO J W, DONG P, et al. Technical characteristics and prospects of power transmissions for commercial vehicles under the “Carbon-Peak and Carbon-Neutrality” target [J]. Journal of Automotive Safety and Energy, 2023, 14(4): 395-412. | |
| 2 | 洪金龙, 高炳钊, 董世营, 等. 智能网联汽车节能优化关键问题与研究进展 [J]. 中国公路学报, 2021, 34(11): 306-334. |
| HONG J L, GAO B Z, DONG S Y, et al. Key problems and research progress of energy saving optimization for intelligent connected vehicles [J]. China Joural of Highway and Transport, 2021, 34(11): 306-334. | |
| 3 | 李兴坤, 郑旭光, 王国晖, 等. 重型商用车预见性自适应巡航控制策略研究 [J]. 汽车工程, 2022, 44(5): 649-655,674. |
| LI X K, ZHENG X G, ZHENG W H, et al. Research on control strategy of predictive adaptive cruise control of heavy duty commercial vehicle [J]. Automotive Engineering, 2022, 44(5): 649-655,674. | |
| 4 | HE D F, HE W T, SONG X L. Efficient predictive cruise control of autonomous vehicles with improving ride comfort and safety [J]. Meas Control-Uk, 2020, 53(1-2): 18-28. |
| 5 | WANG Z, CHU D F, GAO B L, et al. Cloud-based platoon predictive cruise control considering fuel-efficient and platoon stability [J]. J Transp Eng a-Syst, 2024, 150(3). |
| 6 | LIU T, HU X S, LI S E, et al. Reinforcement learning optimized look-ahead energy management of a parallel hybrid electric vehicle [J]. IEEE-Asme T Mech, 2017, 22(4): 1497-1507. |
| 7 | XU Z H, LI J H, XIAO F, et al. Energy-saving model predictive cruise control combined with vehicle driving cycles [J]. Int J Auto Tech-Kor, 2022, 23(2): 439-450. |
| 8 | 孙超, 刘波, 孙逢春. 新能源汽车节能规划与控制技术研究综述 [J]. 汽车安全与节能学报, 2022, 13(4): 593-616. |
| SUN C, LIU B, SUN F C. Review of energy-saving planning and control technology for new energy vehicles [J]. Journal of Automotive Safety and Energy, 2022, 13 (4): 593-616. | |
| 9 | CHEN H, GUO L L, DING H T, et al. Real-time predictive cruise control for eco-driving taking into account traffic constraints [J]. IEEE T Intell Transp, 2019, 20(8): 2858-2868. |
| 10 | HE D F, SHI Y J, SONG X L. Weight-free multi-objective predictive cruise control of autonomous vehicles in integrated perturbation analysis and sequential quadratic programming optimization framework [J]. J Dyn Syst-T Asme, 2019, 141(9). |
| 11 | WANG S Y, LIN X K. Eco-driving control of connected and automated hybrid vehicles in mixed driving scenarios [J]. Appl Energ, 2020, 271. |
| 12 | ZAINUDDIN M A S, ABDULLAH M, AHMAD S, et al. Performance comparison between predictive functional control and PID algorithms for automobile cruise control system [J]. Int J Automo Mech E, 2022, 19(1): 9460-9468. |
| 13 | HE D F, PENG B B. Gaussian learning-based fuzzy predictive cruise control for improving safety and economy of connected vehicles [J]. Iet Intelligent Transport Systems, 2020, 14(5): 346-355. |
| 14 | LIU X, LIU Y W, CHEN Y, et al. Enhancing the fuel-economy of V2I-assisted autonomous driving: a reinforcement learning approach [J]. IEEE T Veh Technol, 2020, 69(8): 8329-8342. |
| 15 | MAADI S, STEIN S, HONG J, et al. Real-time adaptive traffic signal control in a connected and automated vehicle environment: optimisation of signal planning with reinforcement learning under vehicle speed guidance [J]. Sensors-Basel, 2022, 22(19). |
| 16 | SHEN D L, KARBOWSKI D, ROUSSEAU A. Fuel-optimal periodic control of passenger cars in cruise based on pontryagin's minimum principle [J]. Ifac Papersonline, 2018, 51(31): 813-820. |
| 17 | 王建强, 俞倩雯, 李升波, 等. 基于道路坡度实时信息的经济车速优化方法 [J]. 汽车安全与节能学报, 2014, 5(3): 257-262. |
| WANG J Q, YU Q W, LI S B, et al. Eco speed optimization based on real-time information of road gradient [J]. Journal of Automotive Safety and Energy, 2014, 5(3): 257-262. | |
| 18 | 王玉海, 李兴坤, 张鹏雷, 等. 基于ADAS地图的载货车预见巡航实时优化算法 [J]. 汽车工程, 2020, 42(10): 1335-1339,1411. |
| WANG Y H, LI X K, ZHANG P L, et al. Real-time optimization algorithm for truck predictive cruise based on ADAS map [J]. Automotive Engineering, 2020, 42 (10): 1335-1339,1411. | |
| 19 | LI S E, GUO Q Q, XU S B, et al. Performance enhanced predictive control for adaptive cruise control system considering road elevation information [J]. IEEE T Intell Vehicl, 2017, 2(3): 150-160. |
| 20 | JIA Y, JIBRIN R, ITOH Y, et al. Energy-optimal adaptive cruise control for electric vehicles in both time and space domain based on model predictive control [J]. Ifac Papersonline, 2019, 52(5): 13-20. |
| 21 | 邓小豪, 侯进, 谭光鸿, 等. 基于强化学习的多目标车辆跟随决策算法 [J]. 控制与决策, 2021, 36(10): 2497-2503. |
| DENG X H, HOU J, TAN G H, et al. Multi-objective vehicle following decision algorithm based on reinforcement learning [J]. Control and Decision, 2021, 36(10): 2497-2503. | |
| 22 | MYNUDDIN M, GAO W N. Distributed predictive cruise control based on reinforcement learning and validation on microscopic traffic simulation [J]. Iet Intelligent Transport Systems, 2020, 14(5): 270-277. |
| 23 | LI J, WU X D, FAN J W. Speed planning for connected and automated vehicles in urban scenarios using deep reinforcement learning [J]. 2022 IEEE Vehicle Power and Propulsion Conference (Vppc), 2022. |
| 24 | HE W L, HUANG Y. Real-time energy optimization of hybrid electric vehicle in connected environment based on deep reinforcement learning [J]. Ifac Papersonline, 2021, 54(10): 176-181. |
| 25 | GUO J H, LI W C, LUO Y G, et al. Model predictive adaptive cruise control of intelligent electric vehicles based on deep reinforcement learning algorithm FWOR driver characteristics [J]. Int J Auto Tech-Kor, 2023, 24(4): 1175-1187. |
| 26 | LI G Q, GORGES D. Ecological adaptive cruise control for vehicles with step-gear transmission based on reinforcement learning [J]. IEEE T Intell Transp, 2020, 21(11): 4895-4905. |
| 27 | HELLSTRöM E, IVARSSON M, ÅSLUND J, et al. Look-ahead control for heavy trucks to minimize trip time and fuel consumption [J]. Control Eng Pract, 2009, 17(2): 245-254. |
| 28 | GUO L L, GAO B Z, GAO Y, et al. Optimal energy management for HEVs in eco-driving applications using Bi-level MPC [J]. IEEE T Intell Transp, 2017, 18(8): 2153-2162. |
| 29 | YANG J R, PENG W F, SUN C. A learning control method of automated vehicle platoon at straight path with DDPG-based PID (vol 10, 2580, 2021) [J]. Electronics-Switz, 2022, 11(4). |
| 30 | ZHU M X, WANG Y H, PU Z Y, et al. Safe, efficient, and comfortable velocity control based on reinforcement learning for autonomous driving [J]. Transport Res C-Emer, 2020, 117. |
| 31 | ZHU M X, WANG X S, WANG Y H. Human-like autonomous car-following model with deep reinforcement learning [J]. Transport Res C-Emer, 2018, 97: 348-368. |
| 32 | LEE H, CHA S W. Energy management strategy of fuel cell electric vehicles using model-based reinforcement learning with data-driven model update [J]. IEEE Access, 2021, 9: 59244-59254. |
| 33 | LEE H, KANG C, PARK Y I, et al. Online data-driven energy management of a hybrid electric vehicle using model-based Q-learning [J]. IEEE Access, 2020, 8: 84444-84454. |
| 34 | BADINGS T, SIMAO T D, SUILEN M, et al. Decision-making under uncertainty: beyond probabilities challenges and perspectives [J]. Int J Softw Tools Te, 2023, 25(3): 375-391. |
| 35 | WU J D, HUANG Z Y, LV C. Uncertainty-aware model-based reinforcement learning: methodology and application in autonomous driving [J]. IEEE T Intell Vehicl, 2023, 8(1): 194-203. |
| 36 | YEOM K. Learning model predictive control for efficient energy management of electric vehicles under car following and road slopes [J]. Energy Rep, 2022, 8: 599-604. |
| 37 | LIN M, SUN Z Q, XIA Y Q, et al. Reinforcement learning-based model predictive control for discrete-time systems [J]. IEEE T Neur Net Lear, 2024, 35(3): 3312-3324. |
| 38 | CHU Z Z, WANG D, MENG F. An adaptive RBF-NMPC architecture for trajectory tracking control of underwater vehicles [J]. Machines, 2021, 9(5). |
| [1] | 钱立军,陈健,赵丰,陈欣宇,宣亮. 基于快速随机模型预测控制的网联混合车队生态驾驶策略研究[J]. 汽车工程, 2024, 46(9): 1587-1599. |
| [2] | 苏东旭,赵治国,赵坤,李刚,于勤. 基于可拓相平面稳定域划分的Tube-MPC车辆稳定性控制[J]. 汽车工程, 2024, 46(9): 1654-1667. |
| [3] | 李兴坤,王国晖,卢紫旺,王玉海,王语风,田光宇. 基于IDP的重型商用车自适应距离域预见性巡航控制策略[J]. 汽车工程, 2024, 46(8): 1346-1356. |
| [4] | 韩陌,何洪文,石曼,刘伟,曹剑飞,吴京达. 基于学习的无人驾驶车辆模型预测路径跟踪控制研究[J]. 汽车工程, 2024, 46(7): 1197-1207. |
| [5] | 冯桂珍,赵东鹏,李韶华. 基于分数阶的空气弹簧建模及电动汽车主动悬架控制研究[J]. 汽车工程, 2024, 46(7): 1282-1293. |
| [6] | 姚福星,孙超,兰云港,卢兵,王博,于海洋. 基于混合专家模型的智能网联汽车换道决策方法[J]. 汽车工程, 2024, 46(5): 882-892. |
| [7] | 赵树恩,王盛,冷姚. 智能汽车轨迹跟踪多目标显式模型预测控制[J]. 汽车工程, 2024, 46(5): 784-794. |
| [8] | 何一超,寇胜杰,田贺,李昊,芦勇. 面向量产的高速公路智能换道系统决策规划方法研究[J]. 汽车工程, 2024, 46(3): 418-430. |
| [9] | 俞志豪,罗荣康,吴佩宝,侯之超. 四轮轮毂驱动车辆横向稳定性的底盘协同控制[J]. 汽车工程, 2024, 46(10): 1733-1743. |
| [10] | 吴桐,荣劲,王军年,孙文,初亮,葛林鹤. 面向转向制动工况的制动力动态分配策略[J]. 汽车工程, 2024, 46(10): 1755-1765. |
| [11] | 卢少波,代灵峰,王晨辉,刘丙军,褚志刚,谢文科. 基于自主漂移的自动驾驶车辆极限工况轨迹规划与控制[J]. 汽车工程, 2024, 46(10): 1780-1789. |
| [12] | 秦洪懋,江曙,张田田,谢和平,边有钢,李洋. 基于学习型模型预测控制的智能车辆路径跟踪控制[J]. 汽车工程, 2024, 46(10): 1804-1815. |
| [13] | 张忠,吴晓建,江会华,张超,万宇康. 多源干扰下的智能车模型预测纵向运动抗干扰控制[J]. 汽车工程, 2024, 46(10): 1816-1828. |
| [14] | 袁志群,陈衍强,常宇轩,霍殿生,林立. 考虑侧风稳定性的汽车轨迹跟踪自适应时域模型预测控制[J]. 汽车工程, 2024, 46(10): 1829-1841. |
| [15] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
|