汽车工程 ›› 2024, Vol. 46 ›› Issue (10): 1804-1815.doi: 10.19562/j.chinasae.qcgc.2024.10.008
秦洪懋1,2,江曙1,张田田1,谢和平1,3,边有钢1,2( ),李洋1
),李洋1
收稿日期:2024-05-11
修回日期:2024-06-12
出版日期:2024-10-25
发布日期:2024-10-21
通讯作者:
边有钢
E-mail:byg10@foxmail.com
基金资助:
Hongmao Qin1,2,Shu Jiang1,Tiantian Zhang1,Heping Xie1,3,Yougang Bian1,2(),Yang Li1
Received:2024-05-11
Revised:2024-06-12
Online:2024-10-25
Published:2024-10-21
Contact:
Yougang Bian
E-mail:byg10@foxmail.com
摘要:
路径跟踪控制是智能车辆的一项关键技术。然而,现有车辆跟踪控制方法多依赖于较为精确的车辆控制模型,而实际的车辆控制系统多存在建模误差、参数摄动以及外部扰动等,显著影响路径跟踪控制精度。本文针对性地提出一种考虑车辆未建模动态的智能车辆学习型路径跟踪控制方法。首先建立车辆标称模型,并采用线性预言模型对车辆未建模动态进行近似补偿,以提高车辆模型的精度;然后基于扩展卡尔曼滤波原理实现对未建模动态参数的学习更新;之后构建考虑系统未建模动态的学习型模型预测控制器(LMPC);最后通过CarSim和Matlab/Simulink设计多工况多组别联合仿真试验,验证所提方法在提高路径跟踪精度方面的有效性。
秦洪懋,江曙,张田田,谢和平,边有钢,李洋. 基于学习型模型预测控制的智能车辆路径跟踪控制[J]. 汽车工程, 2024, 46(10): 1804-1815.
Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control[J]. Automotive Engineering, 2024, 46(10): 1804-1815.
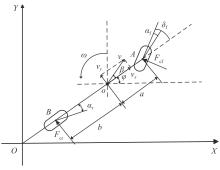
图1
2自由度车辆模型"
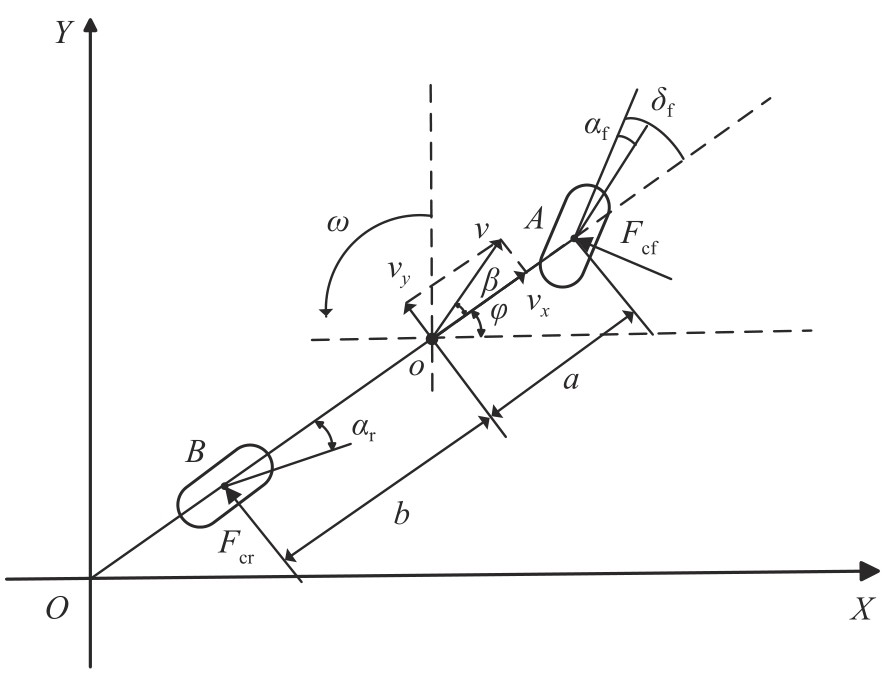
表1
基于LMPC的算法流程"
| 学习型模型预测控制算法流程 |
|---|
| 1:初始化后验估计值 |
| 2:建立车辆标称模型 |
| 3:对系统未建模动态进行线性化建模,得到预言模型,并与标称模型整合得到学习型预测模型 |
| 4:构建包含系统状态量和待学习参数的增广非线性系统 |
| 5:For k=1 To final waypoint |
| 6:更新车辆当前状态 |
| 7:利用EKF将非线性系统线性化,并进行系统状态优化、未建模动态矩阵 |
| 8:得到包含已知未建模动态参数的系统学习型预测模型 |
| 9:寻找未来P步的系统参考路径跟踪点 |
| 10:建立LMPC的优化问题 |
| 11:二次型优化问题转化与求解 |
| 12:将得到的最优控制序列中的第1个元素作用于系统,等待下一个控制周期到来 |
| 13:End |
表2
车辆与控制器参数"
| 参数 | 数值 | 单位 |
|---|---|---|
| 车辆轴距 | 2.91 | m |
| 质心到前轴距离 | 1.015 | m |
| 质心到后轴距离 | 1.895 | m |
| 簧上质量 | 1 270 | kg |
| 质心转动惯量 | 1 536.7 | |
| 前轮侧偏刚度 | -61 126 | N/rad |
| 后轮侧偏刚度 | -51 163 | N/rad |
| LMPC采样步长 | 0.1 | s |
| LMPC预测步数 | 10 | |
| 控制周期 | 0.02 | s |
| 过程噪声协方差矩阵 | 0.01 I | |
| 测量噪声协方差矩阵 | 0.04 I | |
| 系统噪声边界 | [-0.01,0.01] |

图2
正弦曲线路径工况MPC与LMPC仿真"

表3
正弦工况MPC与LMPC横向跟踪误差均方值比较"
| 车速/(km·h-1) | MPC/m | LMPC/m | 性能提升/% |
|---|---|---|---|
| 72 | 0.074 | 0.044 | 40.54 |
| 54 | 0.031 | 0.021 | 32.26 |
| 36 | 0.014 | 0.007 | 50.00 |
| 18 | 0.005 | 0.002 | 60.00 |
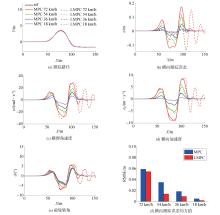
图3
双移线路径工况MPC与LMPC仿真"
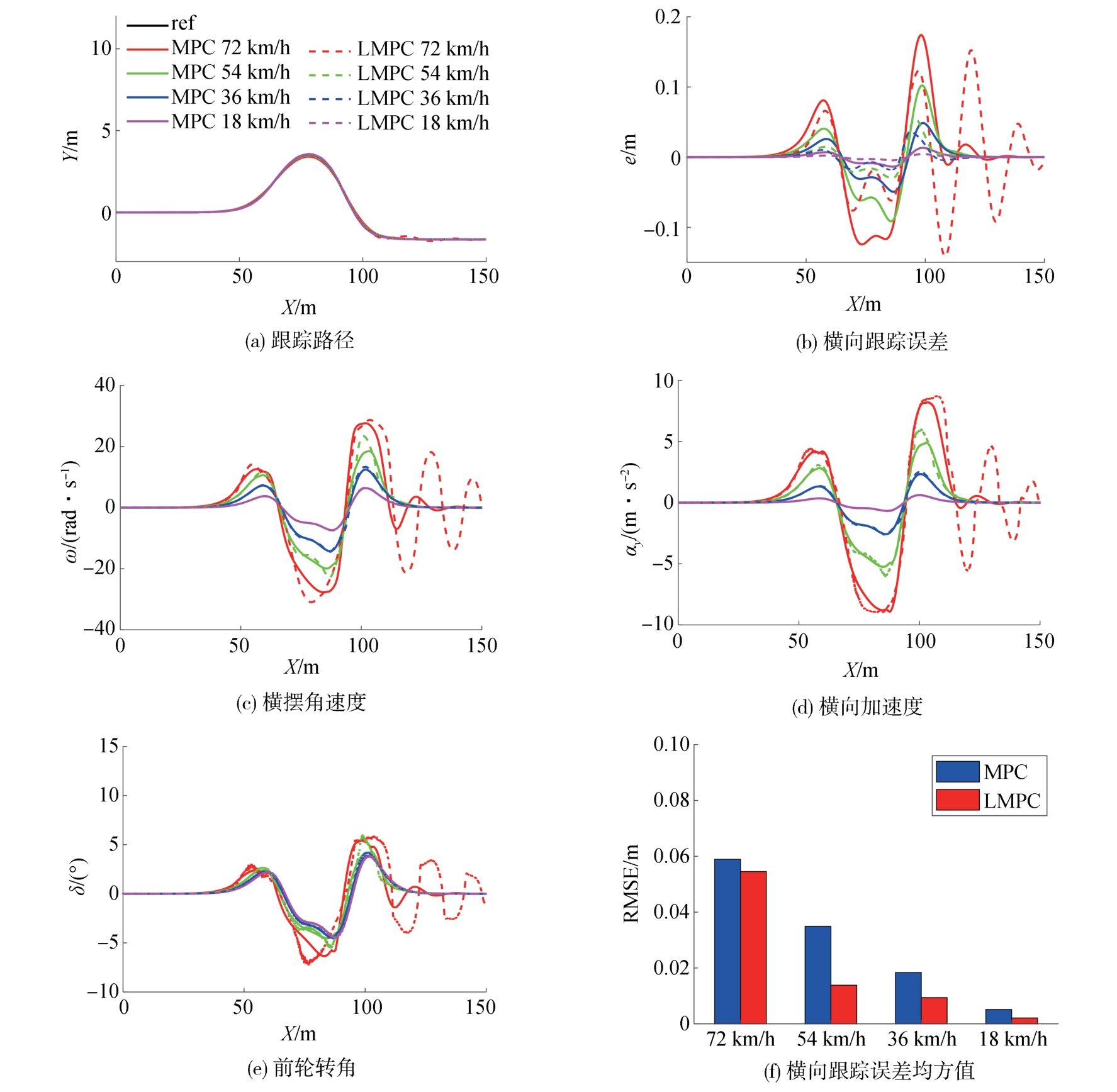
表4
双移线工况MPC与LMPC横向跟踪误差均方值比较"
| 车速/(km·h-1) | MPC/m | LMPC/m | 性能提升/% |
|---|---|---|---|
| 54 | 0.035 | 0.014 | 60.00 |
| 36 | 0.018 | 0.009 | 50.00 |
| 18 | 0.005 | 0.002 | 60.00 |
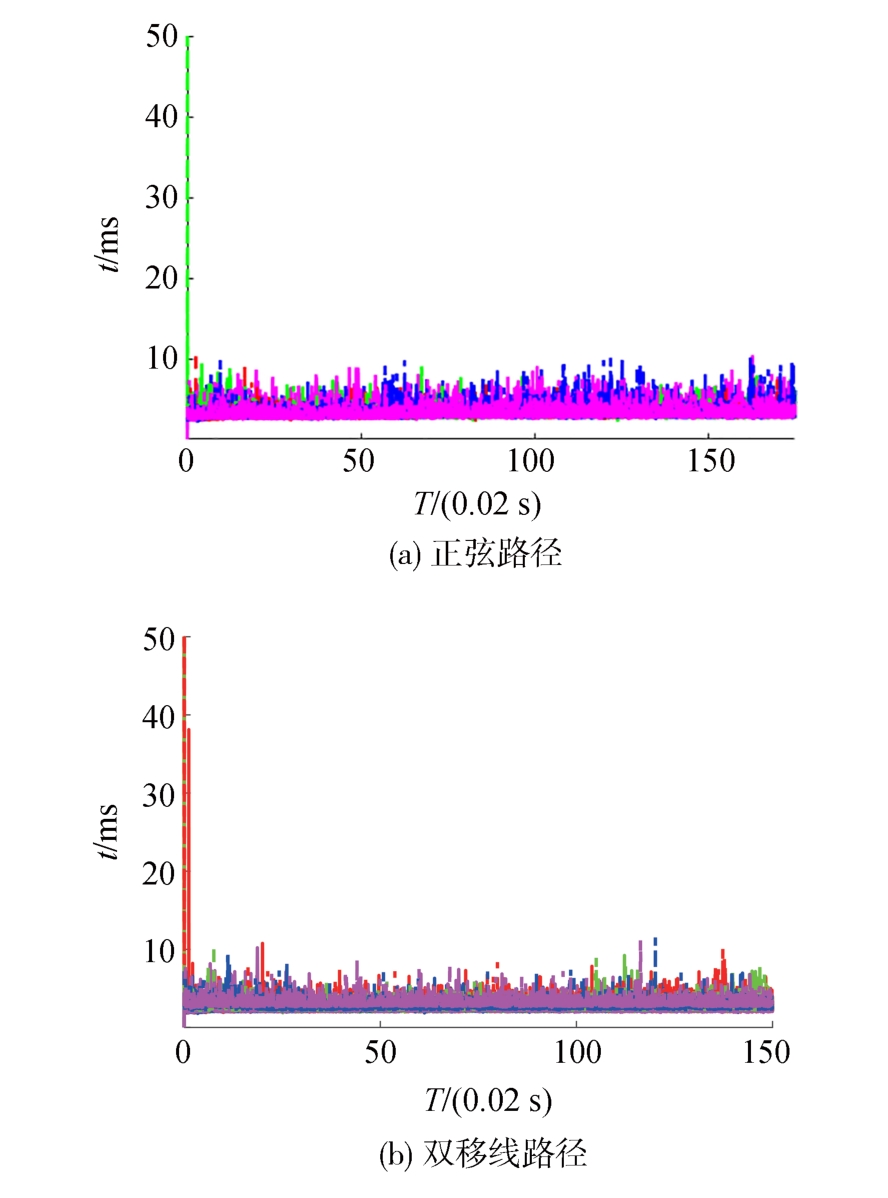
图4
不同工况下MPC和LMPC的计算时间"
| 1 | 采国顺, 刘昊吉, 冯吉伟, 等. 智能汽车的运动规划与控制研究综述[J].汽车安全与节能学报, 2021, 12(3): 279-297. |
| CAI G S, LIU H J, FENG J W, et al. Review on the research of motion planning and control for intelligent vehicles[J]. J Automotive Safety and Energy, 2021, 12(3): 279-297. | |
| 2 | TENG S, HU X, DENG P, et al. Motion planning for autonomous driving: the state of the art and future perspectives[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(6): 3692-3711. |
| 3 | 金立生, 谢宪毅, 司法, 等. 考虑驾驶人特性的智能驾驶路径跟踪算法[J].汽车工程, 2021, 43(4): 553-561. |
| JIN L S, XIE X Y, SI F, et al. Intelligent driving path tracking algorithm considering driver characteristics[J]. Automotive Engineering, 2021, 43(4): 553-561. | |
| 4 | 胡杰, 钟鑫凯, 陈瑞楠, 等. 基于模糊LQR的智能汽车路径跟踪控制[J].汽车工程, 2022, 44(1): 17-25,43. |
| HU J, ZHONG X K, CHEN R N, et al. Path tracking control of intelligent vehicles based on fuzzy LQR[J]. Automotive Engineering, 2022, 44(1): 17-25,43. | |
| 5 | AMER N H, HUDHA K, ZAMZURI H, et al. Adaptive modified stanley controller with fuzzy supervisory system for trajectory tracking of an autonomous armoured vehicle[J]. Robotics and Autonomous Systems, 2018, 105: 94-111. |
| 6 | XU S, PENG H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 48-58. |
| 7 | MARINO R, SCALZI S, NETTO M. Nested PID steering control for lane keeping in autonomous vehicles[J]. Control Engineering Practice, 2011, 19(12): 1459-1467. |
| 8 | WAN N, ZENG G, ZHANG C, et al. Multi-layer controller with state-constraint: vehicle lateral stability control based on fuzzy logic[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(1): 155-167. |
| 9 | JIANG Y, XU X, ZHANG L. Heading tracking of 6WID/4WIS unmanned ground vehicles with variable wheelbase based on model free adaptive control[J]. Mechanical Systems and Signal Processing, 2021, 159: 107715. |
| 10 | FARAG W. Complex trajectory tracking using PID control for autonomous driving[J]. International Journal of Intelligent Transportation Systems Research, 2020, 18(2): 356-366. |
| 11 | XIONG B, QU S. Intelligent vehicle's path tracking based on fuzzy control[J]. Journal of Transportation Systems Engineering and Information Technology, 2010, 10(2): 70-75. |
| 12 | WANG Z, ZHOU X, WANG J. Extremum-seeking-based adaptive model-free control and its application to automated vehicle path tracking[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(5): 3874-3884. |
| 13 | SNIDER J M. Automatic steering methods for autonomous automobile path tracking[J]. Robotics Institute, Pittsburgh, PA, Tech Rep CMU-RITR-09-08, 2009. |
| 14 | 潘世举, 李永乐, 李子先, 等. 基于改进纯跟踪的智能车路径跟随方法[J].汽车工程, 2023, 45(1): 1-8,19. |
| PAN S J, LI Y L, LI Z X, et al. Path following method of intelligent vehicles based on improved pure tracking[J]. Automotive Engineering, 2023, 45(1): 1-8,19. | |
| 15 | BACHA S, SAADI R, AYAD M Y, et al. A review on vehicle modeling and control technics used for autonomous vehicle path following[C].2017 International Conference on Green Energy Conversion Systems (GECS). IEEE, 2017: 1-6. |
| 16 | YANG J, BAO H, MA N, et al. An algorithm of curved path tracking with prediction model for autonomous vehicle[C].2017 13th International Conference on Computational Intelligence and Security (CIS). IEEE, 2017: 405-408. |
| 17 | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J].机械工程学报, 2020, 56(10): 127-143. |
| XIONG L, YANG X, ZHUO G R, et al. Review on motion control of autonomous vehicles[J]. Journal of Mechnical Engineering, 2020, 56(10): 127-143. | |
| 18 | QINPENG S, ZHONGHUA W, MENG L, et al. Path tracking control of wheeled mobile robot based on improved pure pursuit algorithm[C].2019 Chinese Automation Congress (CAC). IEEE, 2019: 4239-4244. |
| 19 | AHN J, SHIN S, KIM M, et al. Accurate path tracking by adjusting look-ahead point in pure pursuit method[J]. International Journal of Automotive Technology, 2021, 22: 119-129. |
| 20 | THRUN S, MONTEMERLO M, DAHLKAMP H, et al. Stanley: the robot that won the DARPA grand challenge[J]. Journal of field Robotics, 2006, 23(9): 661-692. |
| 21 | ABDELMONIEM A, OSAMA A, ABDELAZIZ M, et al. A path-tracking algorithm using predictive Stanley lateral controller[J]. International Journal of Advanced Robotic Systems, 2020, 17(6): 1729881420974852. |
| 22 | 周卫琪, 赵羿寒, 刘擎超, 等. 基于改进LQR的车辆路径跟踪横向控制策略[J].华中科技大学学报(自然科学版), 2024, 52(3): 135-141. |
| ZHOU W Q, ZHAO Y H, LIU Q C, et al. Lateral control strategy of vehicle path tracking based on improved LQR[J]. J. Huazhong Univ. of Sci. & Tech, 2024, 52(3): 135-141. | |
| 23 | FAN Z, CHEN H. Study on path following control method for automatic parking system based on LQR[J]. SAE International Journal of Passenger Cars-Electronic and Electrical Systems, 2016, 10(2016-01-1881): 41-49. |
| 24 | 陈亮, 秦兆博, 孔伟伟, 等. 基于最优前轮侧偏力的智能汽车LQR横向控制[J].清华大学学报(自然科学版), 2021, 61(9): 906-912. |
| CHEN L, QING Z B, KONG W W, et al. Lateral control using LQR for intelligent vehicles based on the optimal front-tire lateral force[J]. J Tsinghua Univ (Sci & Technol), 2021, 61(9): 906-912. | |
| 25 | LIU T, SHEN Y, WANG K. Path tracking control for autonomous truck with dual modular chassis[J]. Automotive Innovation, 2023, 6(4): 558-570. |
| 26 | GENG K, LIU S. Robust path tracking control for autonomous vehicle based on a novel fault tolerant adaptive model predictive control algorithm[J]. Applied Sciences, 2020, 10(18): 6249. |
| 27 | BIAN Y, DING J, HU M, et al. An advanced lane-keeping assistance system with switchable assistance modes[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 385-396. |
| 28 | 余志生. 汽车理论[M]. 北京: 机械工业出版社, 2009. |
| YU Z S. Automobile theory[M]. Beijing: Machinery Industry Press, 2009. | |
| 29 | DOGAN I, SHEN Z J M, ASWANI A. Regret analysis of learning-based MPC with partially-unknown cost function[J]. IEEE Transactions on Automatic Control, 2023: 1-8. |
| 30 | LJUNG L. Asymptotic behavior of the extended Kalman filter as a parameter estimator for linear systems[J]. IEEE Transactions on Automatic Control, 1979, 24(1): 36-50. |
| 31 | 边有钢, 张田田, 胡云卿, 等. 一种自动驾驶车辆学习型路径跟踪预测控制方法: CN113306573B[P]. 2022-08-16. |
| BIAN Y G, ZHANG T T, HU Y Q, et al. A learning path tracking predictive control method for automated vehicles: CN113306573B[P]. 2022-08-16. | |
| 32 | 王艺, 蔡英凤, 陈龙, 等. 基于模型预测控制的智能网联汽车路径跟踪控制器设计[J].机械工程学报, 2019, 55(8): 136-144,153. |
| WANG Y, CAI Y F, CHEN L, et al. Design of intelligent and connected vehicle path tracking controller based on model predictive control[J]. Journal of Mechnical Engineering, 2019, 55(8): 136-144,153. | |
| 33 | TONG Y, LI C, WANG G, et al. Integrated path-following and fault-tolerant control for four-wheel independent-driving electric vehicles[J]. Automotive Innovation, 2022, 5(3): 311-323. |
| [1] | 杨秀建,白永瑞. 基于图搜索与优化的动态非结构环境智能车辆轨迹规划[J]. 汽车工程, 2024, 46(9): 1564-1575. |
| [2] | 范晓临,张旭东,邹渊,尹鑫,刘颖群. 一种基于简化可视图的建图和规划方法[J]. 汽车工程, 2024, 46(7): 1249-1258. |
| [3] | 赵树恩,王盛,冷姚. 智能汽车轨迹跟踪多目标显式模型预测控制[J]. 汽车工程, 2024, 46(5): 784-794. |
| [4] | 边有钢,张田田,谢和平,秦洪懋,杨泽宇. 车辆队列抗扰抗内切协同路径跟踪控制[J]. 汽车工程, 2023, 45(8): 1320-1332. |
| [5] | 张新荣,谭宇航,贾一帆,黄晋,许权宁. 四轮独立驱动电动汽车路径跟踪鲁棒控制[J]. 汽车工程, 2023, 45(2): 253-262. |
| [6] | 吕彦直,魏超,何元浩. 基于GCN和CIL的端到端自动驾驶换道方法[J]. 汽车工程, 2023, 45(12): 2310-2317. |
| [7] | 黄圣杰,胡满江,周云水,殷周平,秦晓辉,边有钢,贾倩倩. 动态场景下基于语义分割与运动一致性约束的车辆视觉SLAM[J]. 汽车工程, 2022, 44(10): 1503-1510. |
| [8] | 陈吉清,翁楚滨,兰凤崇. 智能车辆换道潜在冲突分析与风险量化方法[J]. 汽车工程, 2021, 43(11): 1565-1576. |
| [9] | 章军辉,付宗杰,郭晓满,李庆,陈大鹏,赵野. 基于HS⁃FCM模糊聚类的快速多目标车辆跟踪算法[J]. 汽车工程, 2021, 43(10): 1419-1426. |
| [10] | 宋晓琳,盛鑫,曹昊天,李明俊,易滨林,黄智. 基于模仿学习和强化学习的智能车辆换道行为决策[J]. 汽车工程, 2021, 43(1): 59-67. |
| [11] | 陈无畏, 王其东, 丁雨康, 赵林峰, 王慧然, 谢有浩. 基于预期偏移距离的人机权值分配策略研究*[J]. 汽车工程, 2020, 42(4): 513-521. |
| [12] | 潘世举, 李华, 苏致远, 徐友春. 基于跟踪误差模型的智能车辆轨迹跟踪方法*[J]. 汽车工程, 2019, 41(9): 1021-1027. |
| [13] | 汪若尘, 魏振东, 叶青, 蔡英凤, 陈龙. 视觉预瞄式智能车辆纵横向协同控制研究[J]. 汽车工程, 2019, 41(7): 763-770. |
| [14] | 任玥, 郑玲, 张巍, 杨威, 熊周兵. 基于模型预测控制的智能车辆主动避撞控制研究*[J]. 汽车工程, 2019, 41(4): 404-410. |
| [15] | 金辉,丁峰. 智能车辆换道行驶的经济车速研究[J]. 汽车工程, 2018, 40(5): 542-546. |
|