汽车工程 ›› 2024, Vol. 46 ›› Issue (7): 1249-1258.doi: 10.19562/j.chinasae.qcgc.2024.07.012
• • 上一篇
范晓临1,张旭东1( ),邹渊1,尹鑫2,刘颖群1
),邹渊1,尹鑫2,刘颖群1
Xiaolin Fan1,Xudong Zhang1(),Yuan Zou1,Xin Yin2,Yingqun Liu1
摘要:
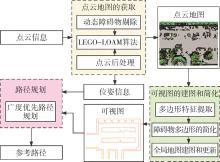
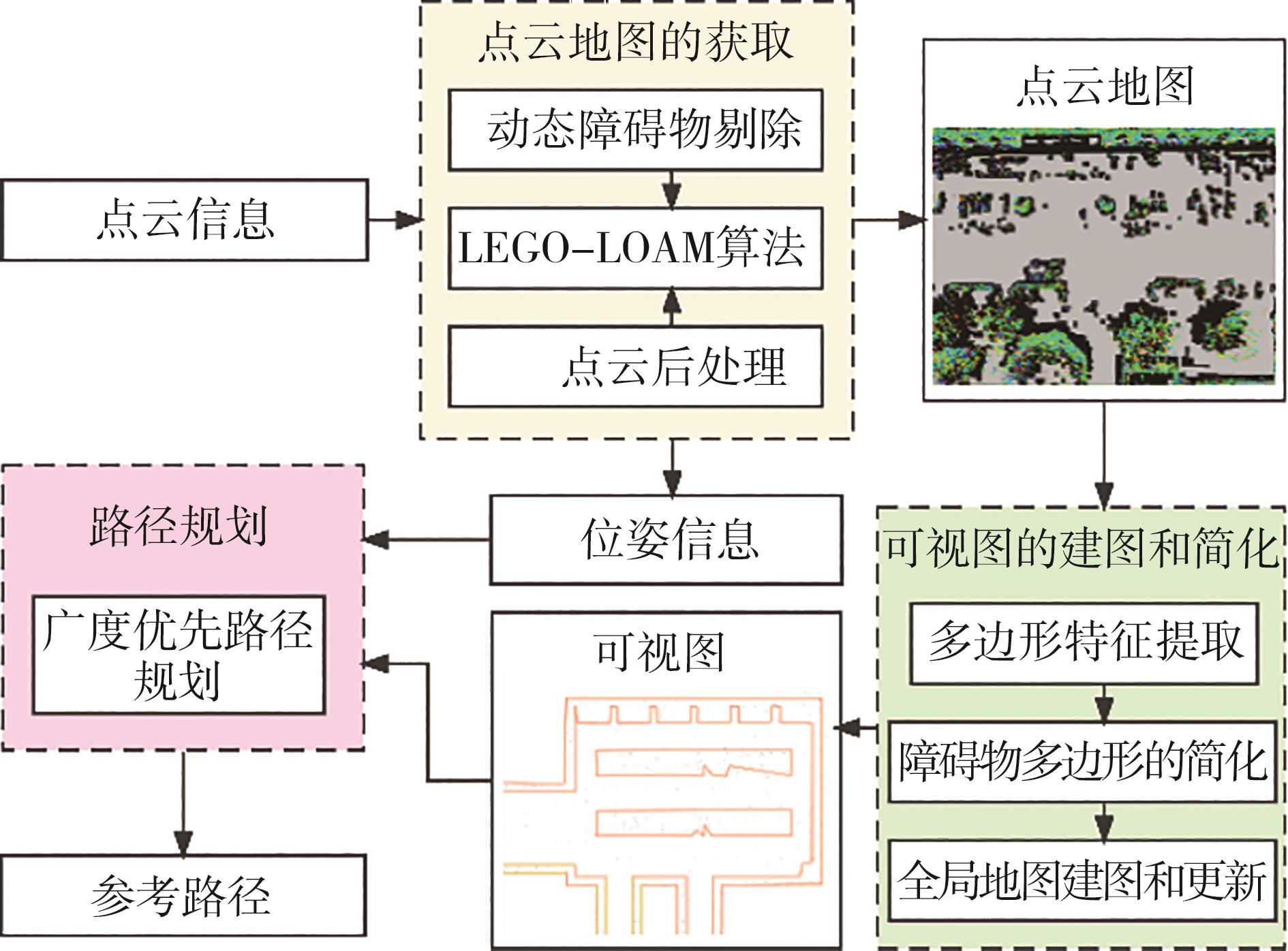
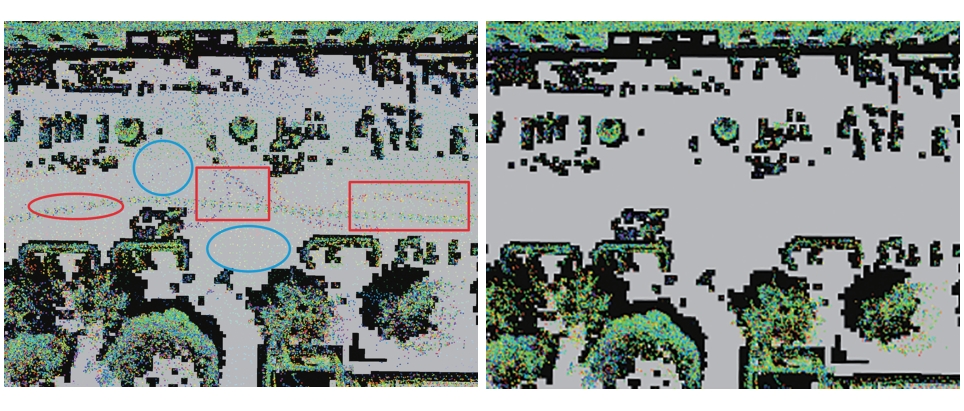
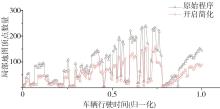
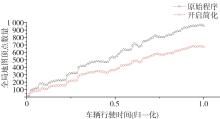
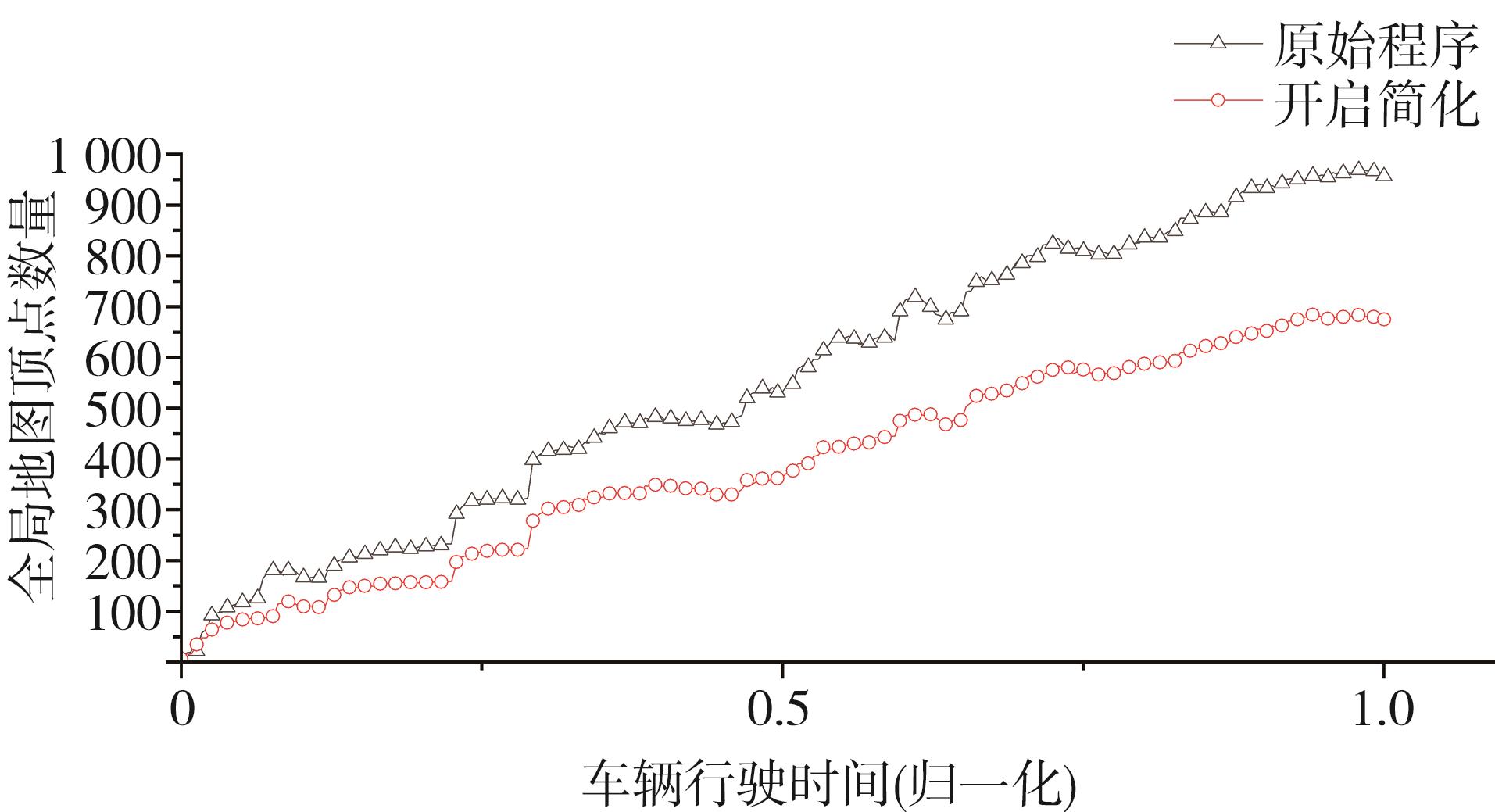
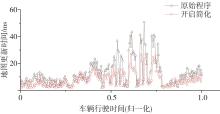
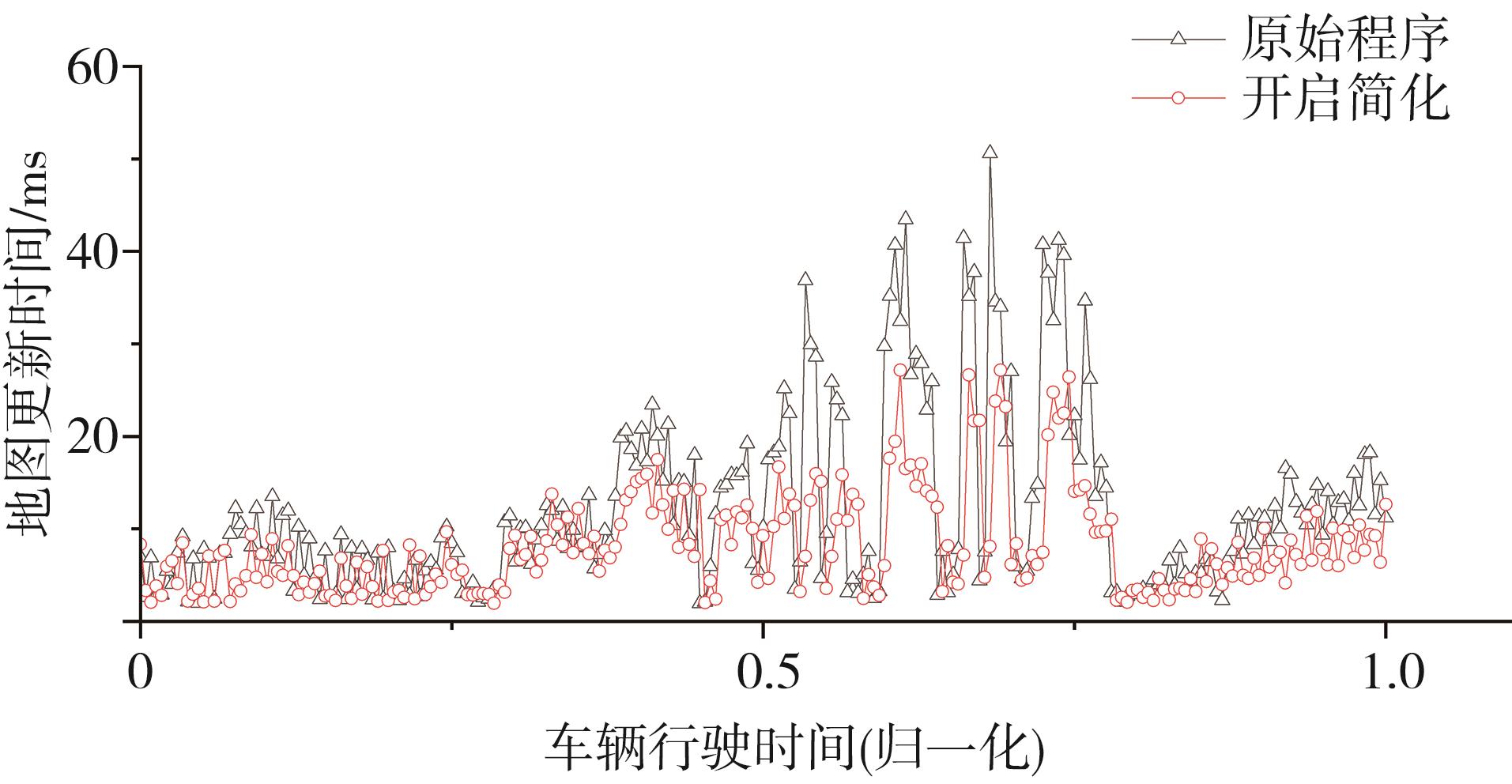
当前车辆路径规划大部分是基于栅格地图的规划方法,这种方法在搜索面积较大时计算量也会大幅增加。相比之下,基于可视图的方法能够在路径搜索时减小计算量,但是受到障碍物复杂程度的影响较大。针对这一问题,本文结合SLAM和可视图的方法,提出了一种简化可视图的建图和规划方法。首先使用改进的SLAM算法生成点云地图,并进行动态障碍物的剔除。接着生成可视图,并基于障碍物的大小和顶点处内凹角的大小对可视图中多边形的复杂边缘进行简化,剔除冗余的顶点。最后通过仿真和实车实验证明,该方法相对原有的算法,在保证建图精度的情况下,可视图中多边形的顶点数量减少20%~30%,地图更新时间和整体算法的运行时间减少30%以上。这表明本文方法能够有效减小建图和规划过程的计算量和算法的运行时间。