汽车工程 ›› 2024, Vol. 46 ›› Issue (4): 588-595.doi: 10.19562/j.chinasae.qcgc.2024.04.004
• • 上一篇
丁志杰1,王亚飞1,2( ),章翼辰1,邬明宇1,王亦乐1
),章翼辰1,邬明宇1,王亦乐1
Ting Chikit1,Yafei Wang1,2(),Yichen Zhang1,Mingyu Wu1,Yile Wang1
摘要:
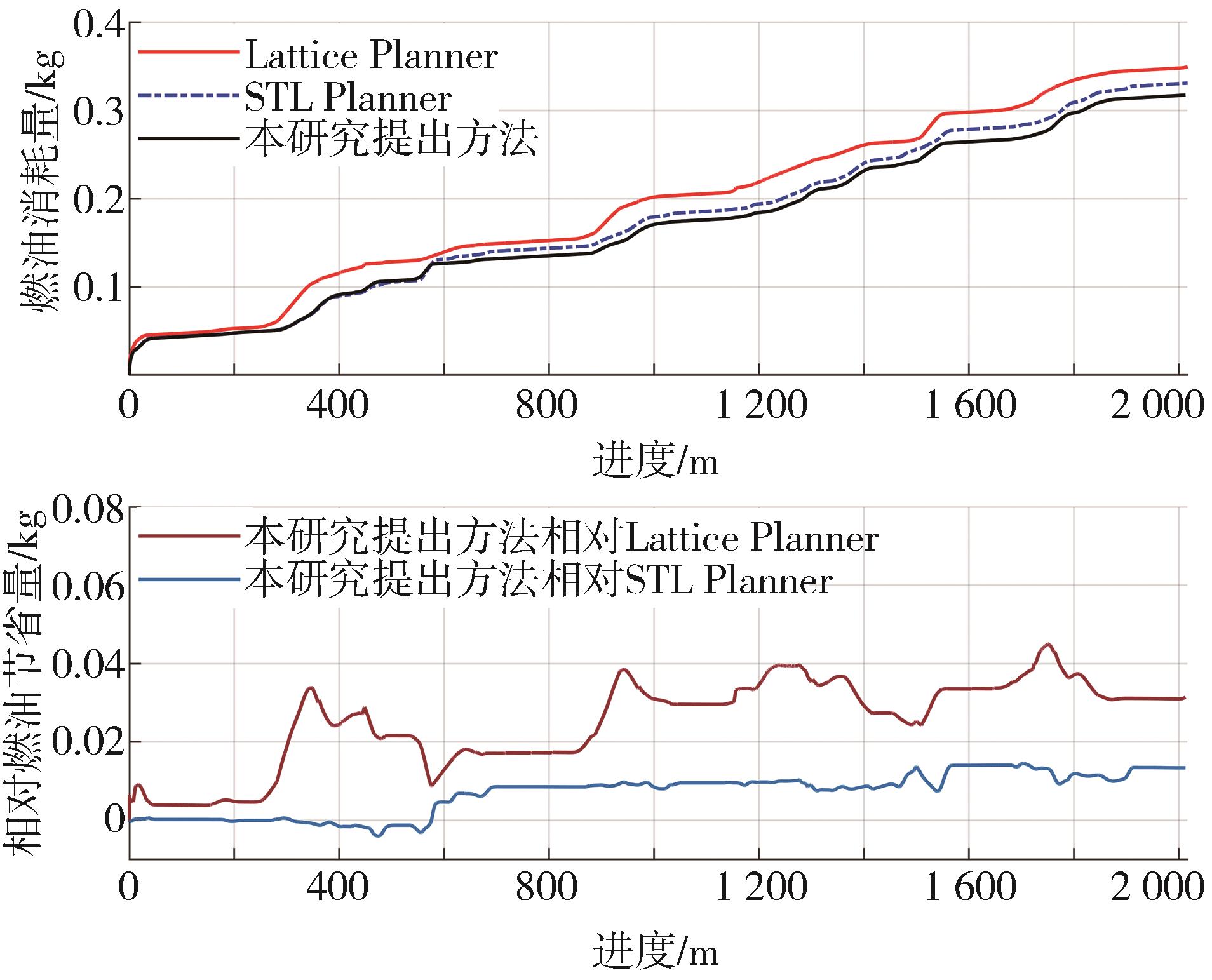
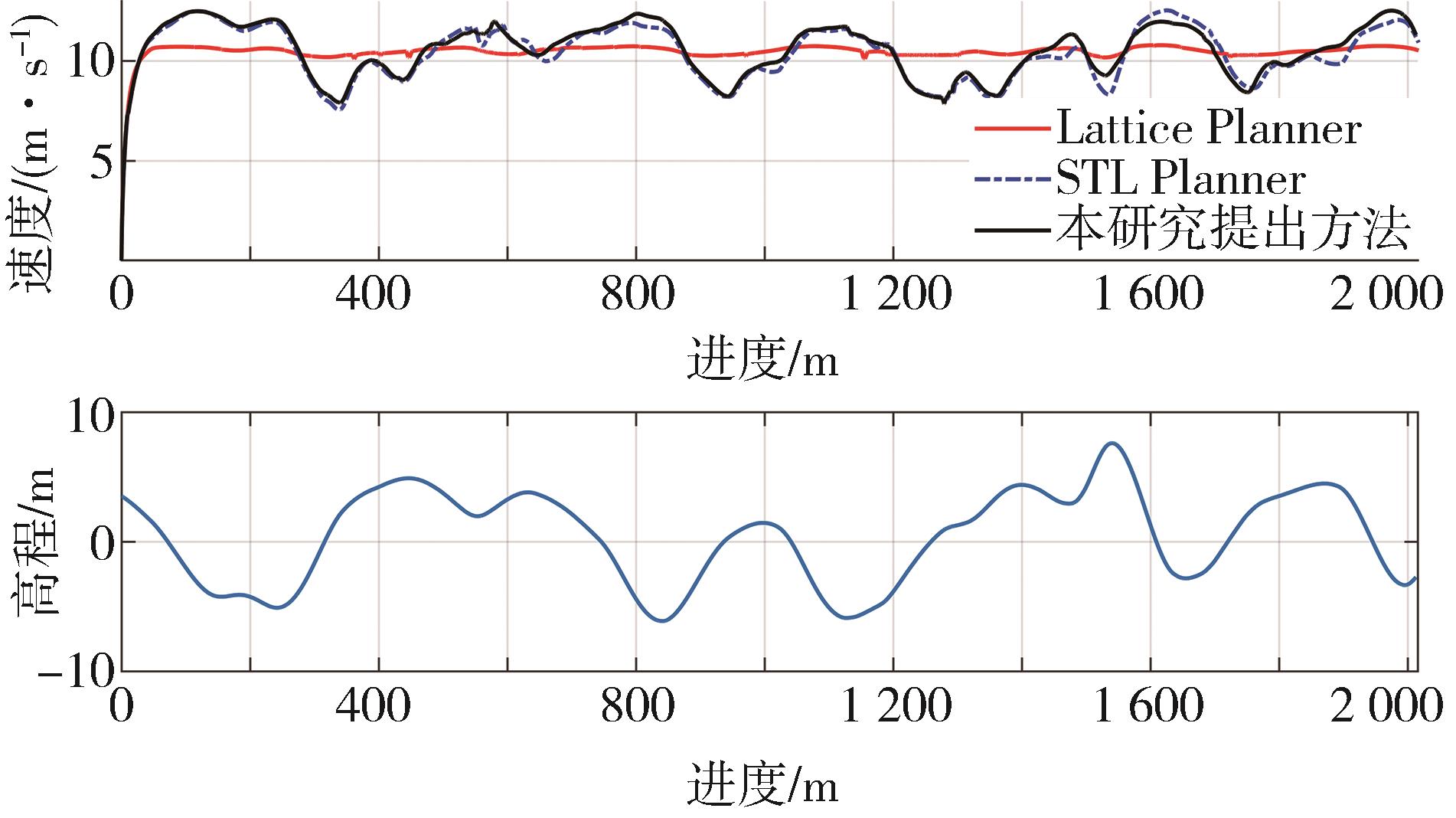
近年来,考虑安全与效率的自动驾驶矿车路径规划方法已逐渐成熟,并在多种矿山场景落地应用。与此同时,产业界和学术界也开始关注如何利用路径规划提升矿车的燃油经济性。针对这一需求,本文提出了一种矿山场景下的自动驾驶矿车节能路径规划方法,其主要特点是根据车速、道路坡度及障碍物进行S-L(进度-偏离)和S-T(进度-时间)的复合动态采样。针对矿山典型地形场景,建立了矿车燃油消耗指标,提出了安全性-运行效率-能耗综合路径评价模型;为了防止评价模型的各项权重陷入局部最优,设计了基于模拟退火策略的粒子群自适应优化方法。在矿山实际场景的测试中,本研究提出方法较现有方法在燃油经济性指标上平均提升了11.28%。