汽车工程 ›› 2024, Vol. 46 ›› Issue (10): 1829-1841.doi: 10.19562/j.chinasae.qcgc.2024.10.010
袁志群1,2,3( ),陈衍强1,常宇轩1,霍殿生1,林立1,2
),陈衍强1,常宇轩1,霍殿生1,林立1,2
Zhiqun Yuan1,2,3(),Yanqiang Chen1,Yuxuan Chang1,Diansheng Huo1,Li Lin1,2
摘要:
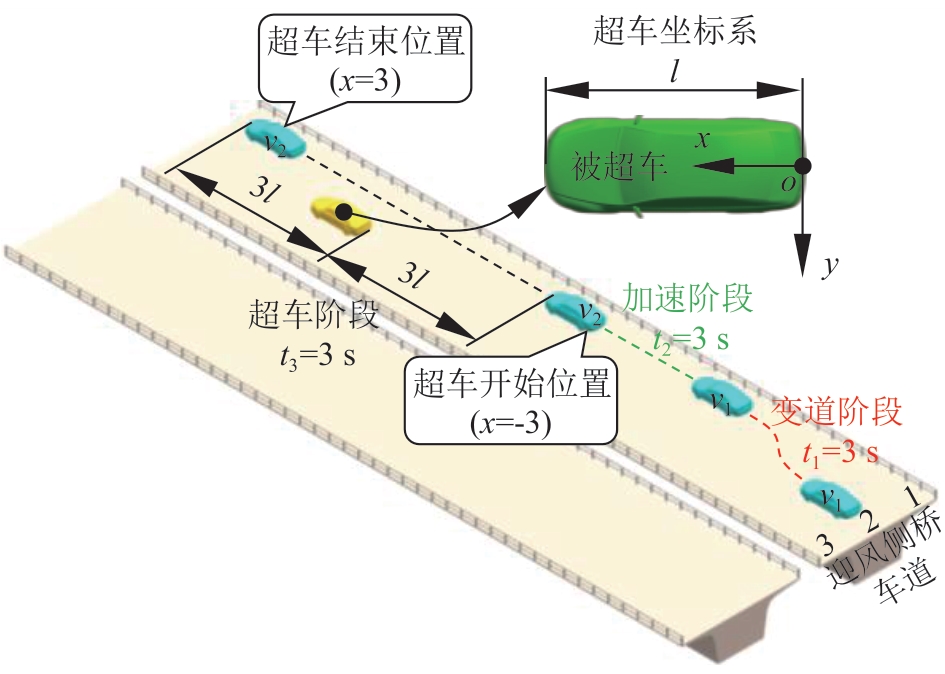
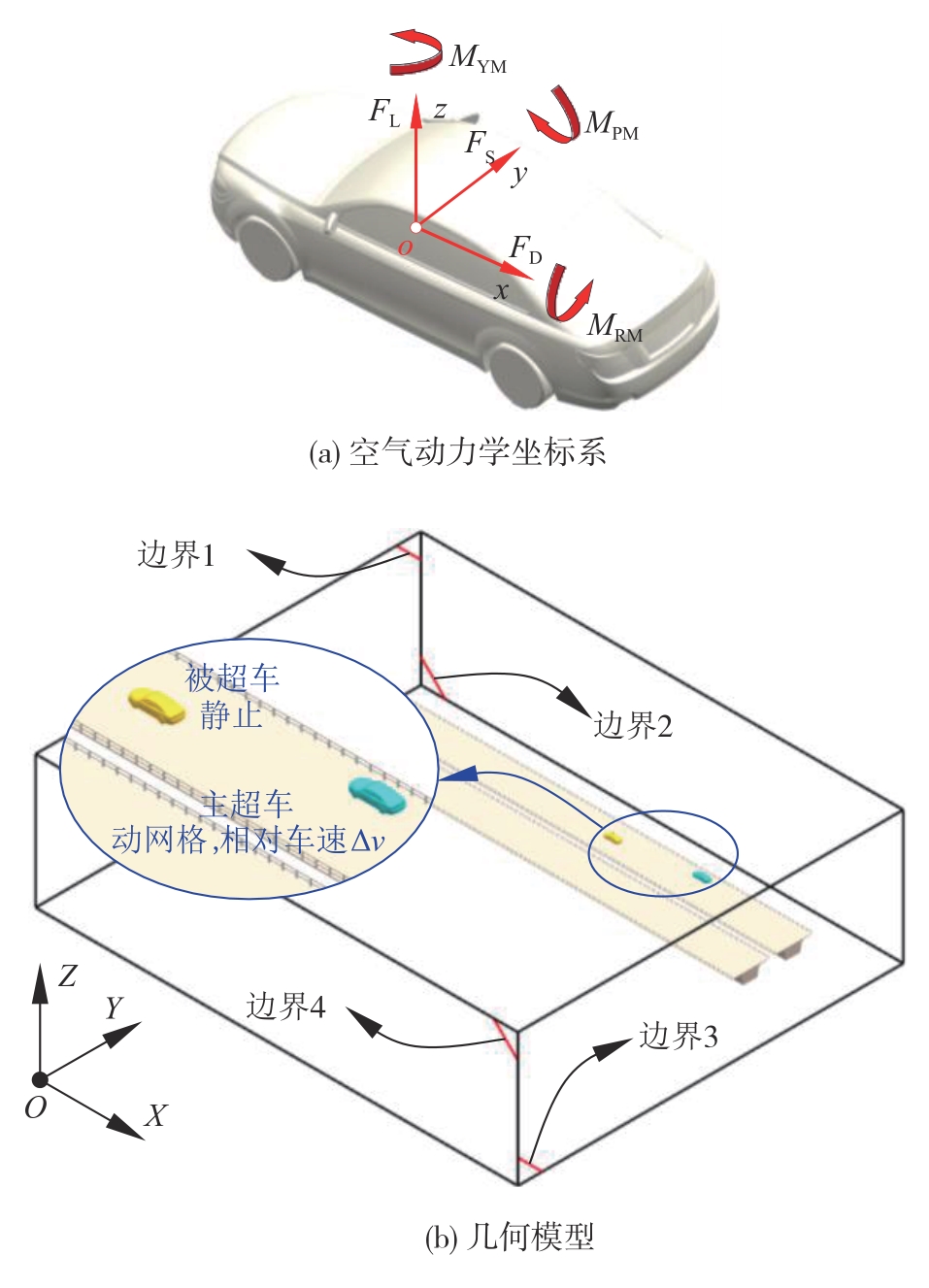
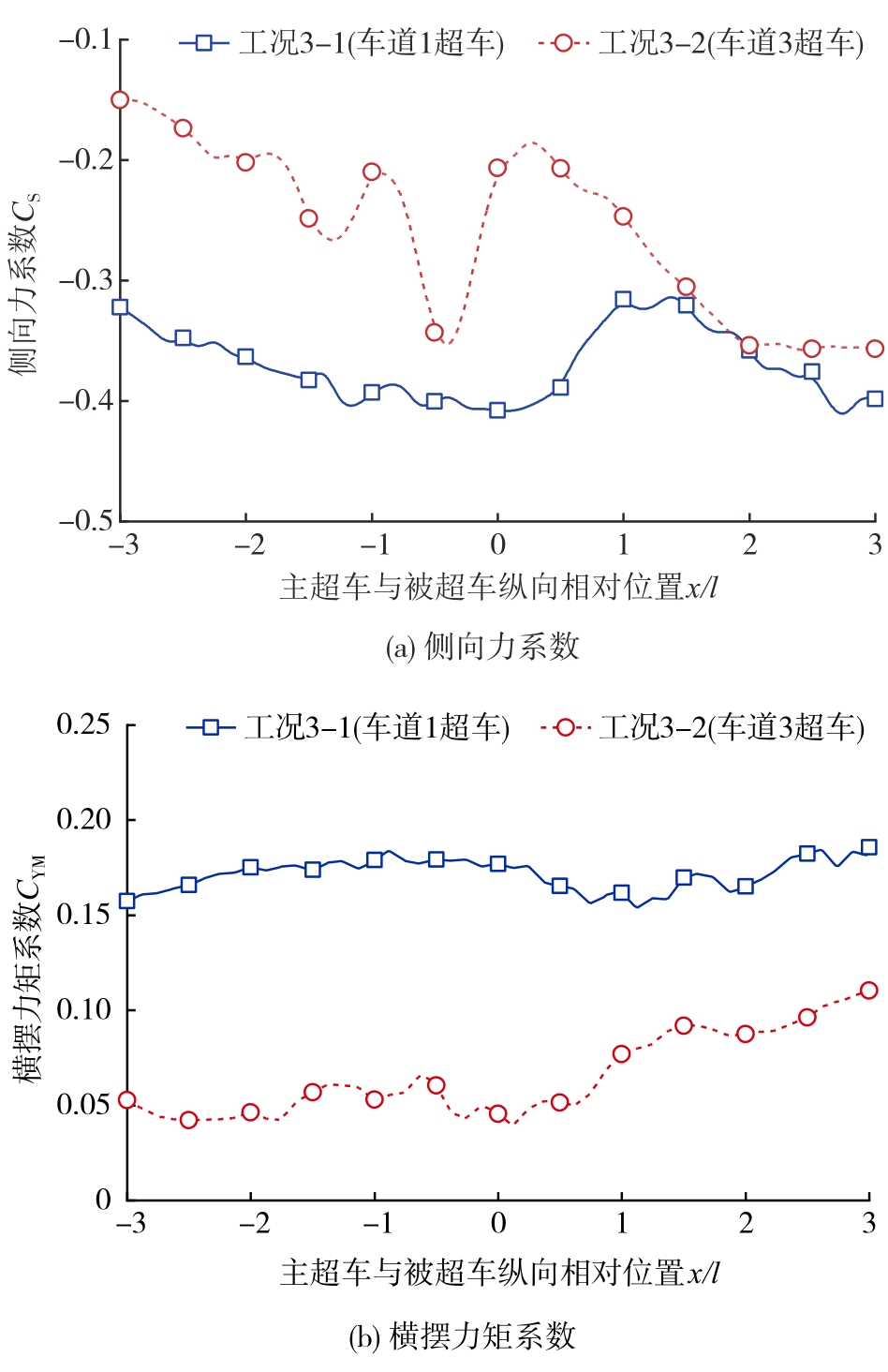
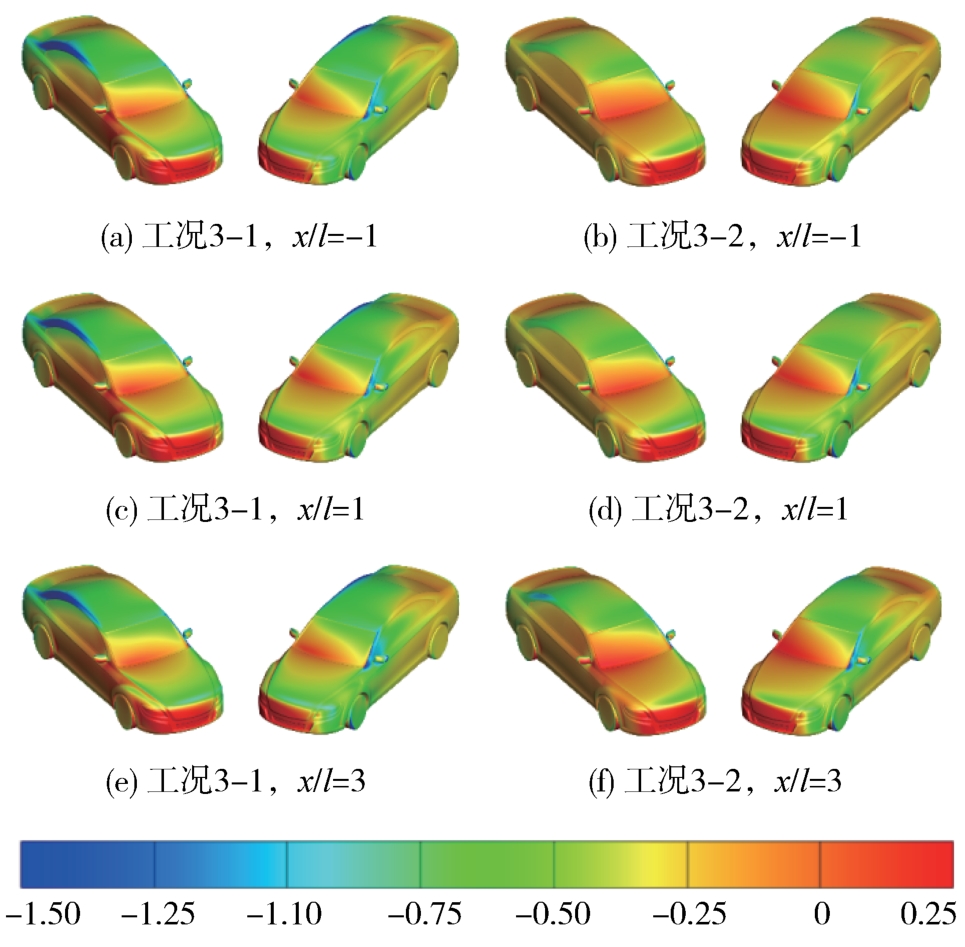
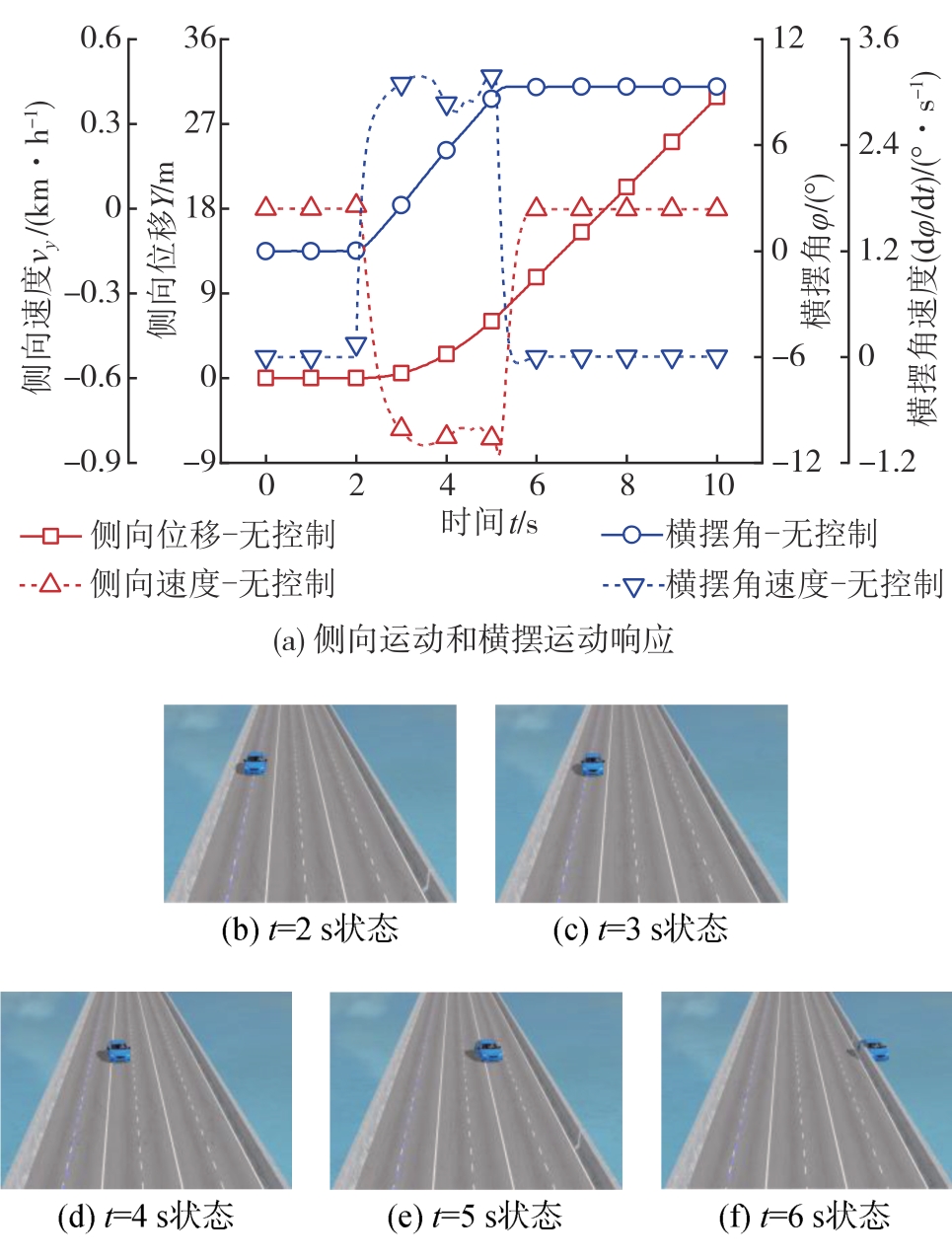
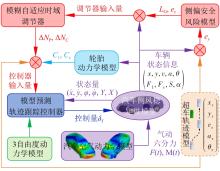
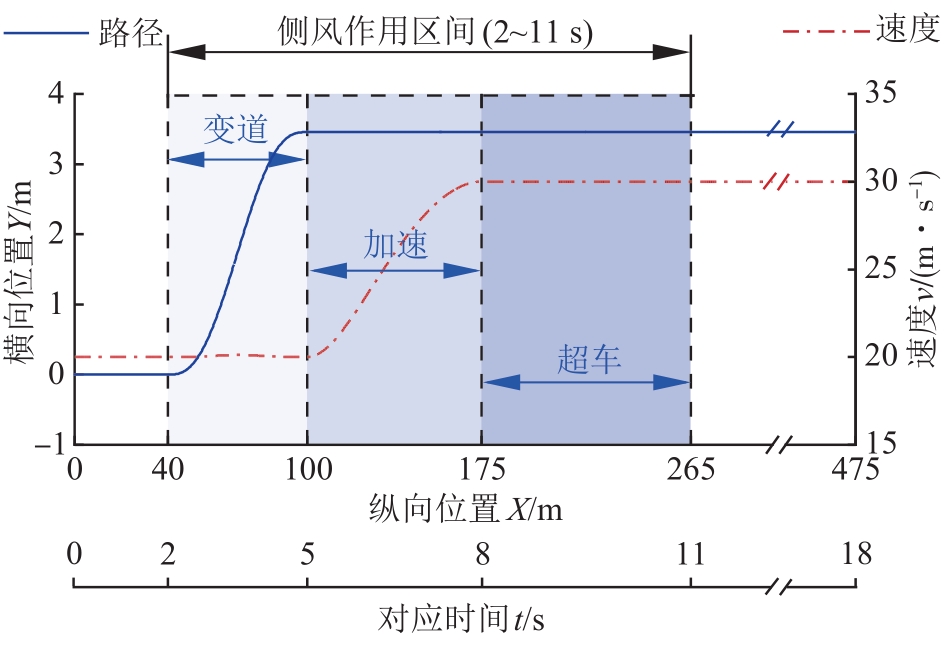
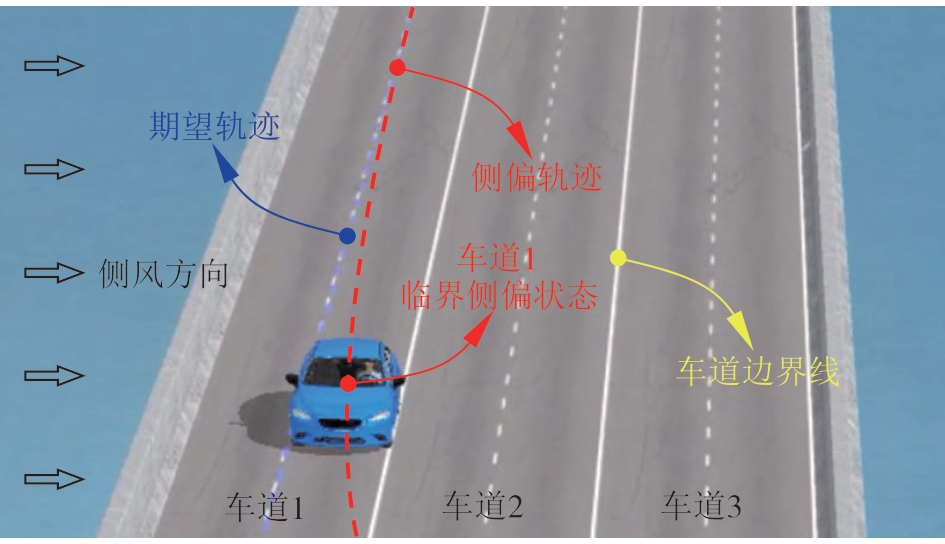
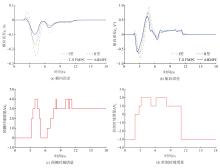
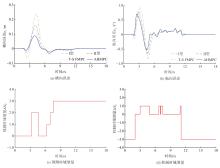
为扩展模型预测控制的应用场景,提高智能汽车在极端风环境下的轨迹跟踪精度,提出了一种考虑侧风稳定性的自适应时域控制方法。首先,以跨海桥梁上轿车超车过程为研究对象,采用汽车空气动力学与系统动力学耦合方法建立轿车超车的侧风稳定性分析模型;接着,建立汽车侧偏安全风险模型,以侧偏风险等级、车速及横向误差为参考设计时域自适应调节器,实现预测时域和控制时域的动态调节;最后,采用CarSim和Simulink搭建联合仿真场景,通过五次多项式规划超车轨迹,验证控制器的跟踪精度及鲁棒性。结果表明:与固定时域及变权重模型预测控制器相比,改进后的控制器可以更好地抵抗“风-车-桥”的气动干扰,以较低的实时性代价提高了车辆轨迹跟踪精度,汽车侧风稳定性得到明显提升。