汽车工程 ›› 2024, Vol. 46 ›› Issue (9): 1600-1607.doi: 10.19562/j.chinasae.qcgc.2024.09.007
• • 上一篇
朱冰1,范天昕1,赵健1,张培兴1( ),宋东鉴1,薛越1,赵文博2
),宋东鉴1,薛越1,赵文博2
Bing Zhu1,Tianxin Fan1,Jian Zhao1,Peixing Zhang1(),Dongjian Song1,Yue Xue1,Wenbo Zhao2
摘要:
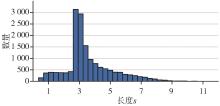
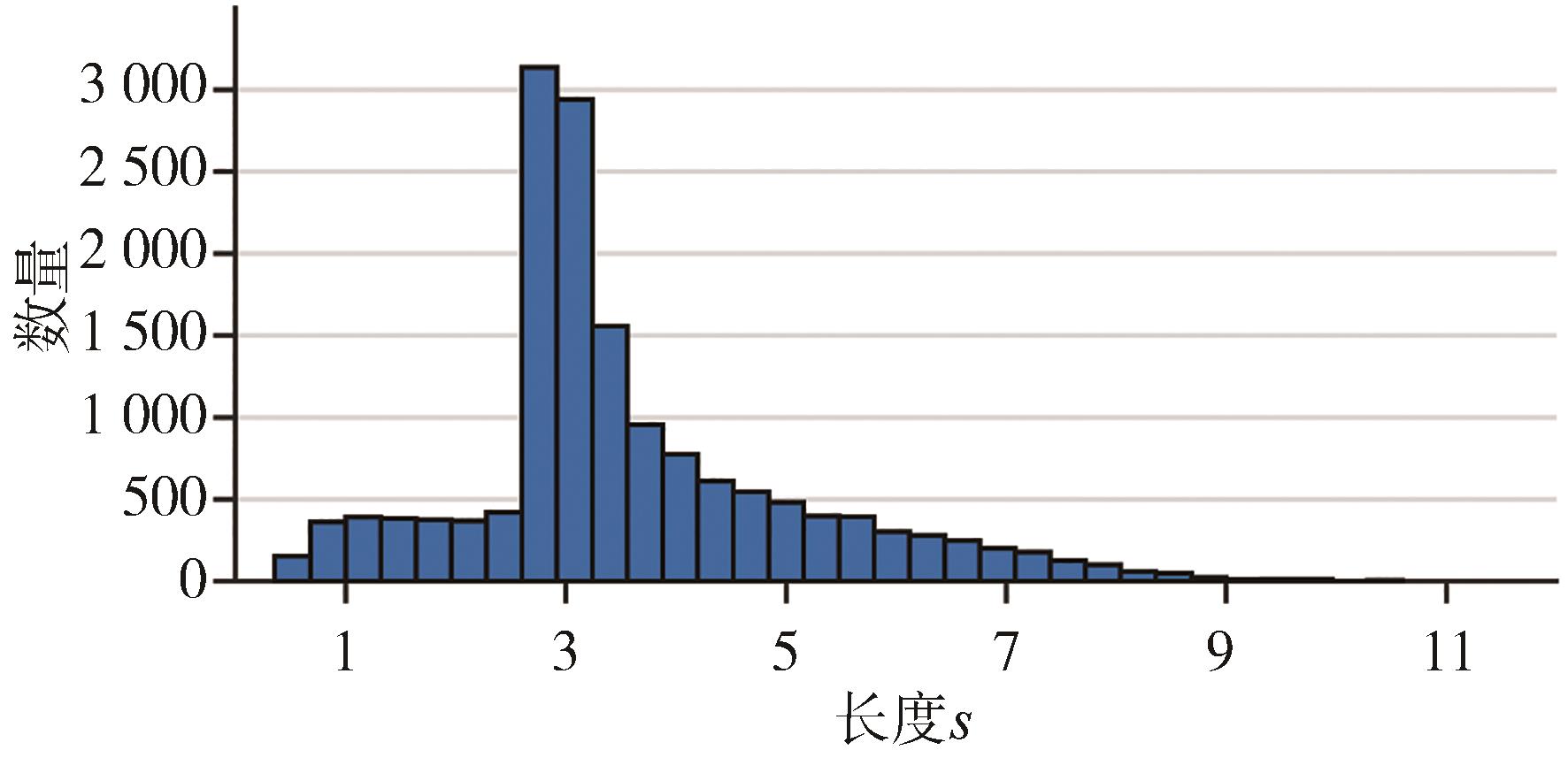
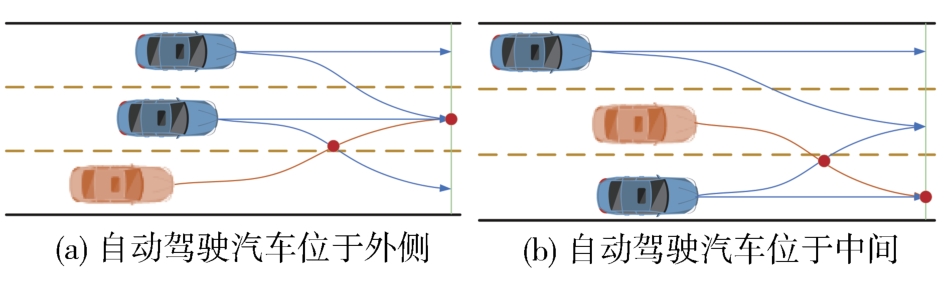
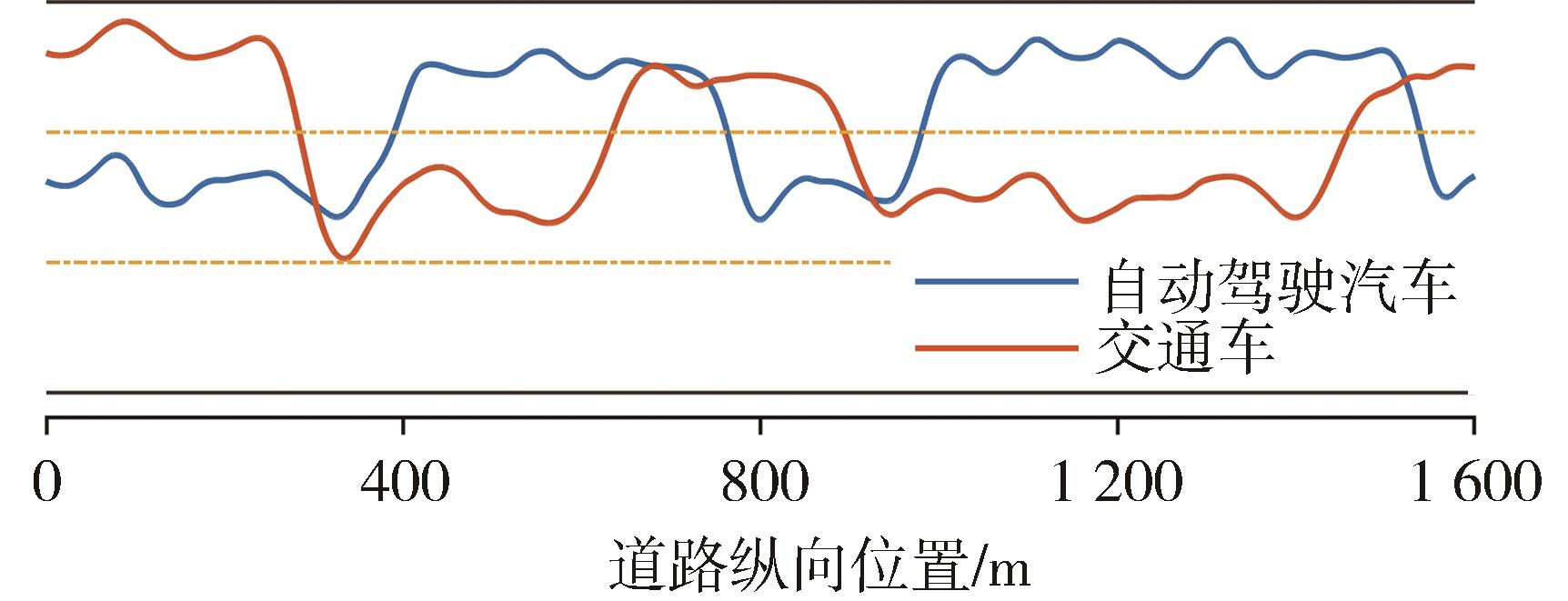
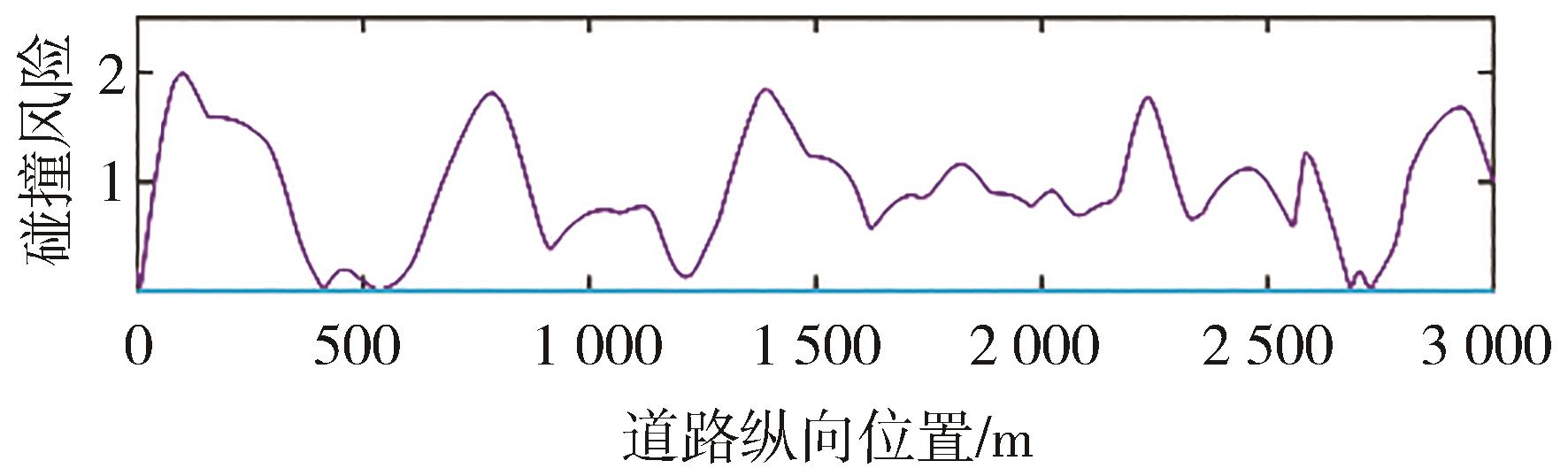
基于场景的仿真测试方法是自动驾驶汽车安全性验证的重要手段,然而当前测试场景生成方法多输出独立场景片段,如何模拟真实人类驾驶过程生成具有一定挑战的连续交互测试场景已成为自动驾驶测试评价亟须攻克的难题。本文提出了一种自动驾驶拟人连续交互测试场景生成方法。首先建立自动驾驶拟人连续交互测试场景生成架构,并基于HighD数据集进行车辆运动行为分析;在此基础上,基于轨迹相似性特征分析被测自动驾驶汽车当前行为,并通过状态转移矩阵预测其未来轨迹;基于轨迹交互规则确定测试场景中交通车未来行为类型,通过Transform网络架构生成交通车拟人连续交互轨迹;最后,在仿真环境中对生成测试场景的危险性、拟人性等关键性能进行评估,证明了本文方法的有效性。