汽车工程 ›› 2024, Vol. 46 ›› Issue (7): 1219-1227.doi: 10.19562/j.chinasae.qcgc.2024.07.009
• • 上一篇
李琳辉,付一帆,王霆,王雪成,连静( )
)
Linhui Li,Yifan Fu,Ting Wang,Xuecheng Wang,Jing Lian()
摘要:
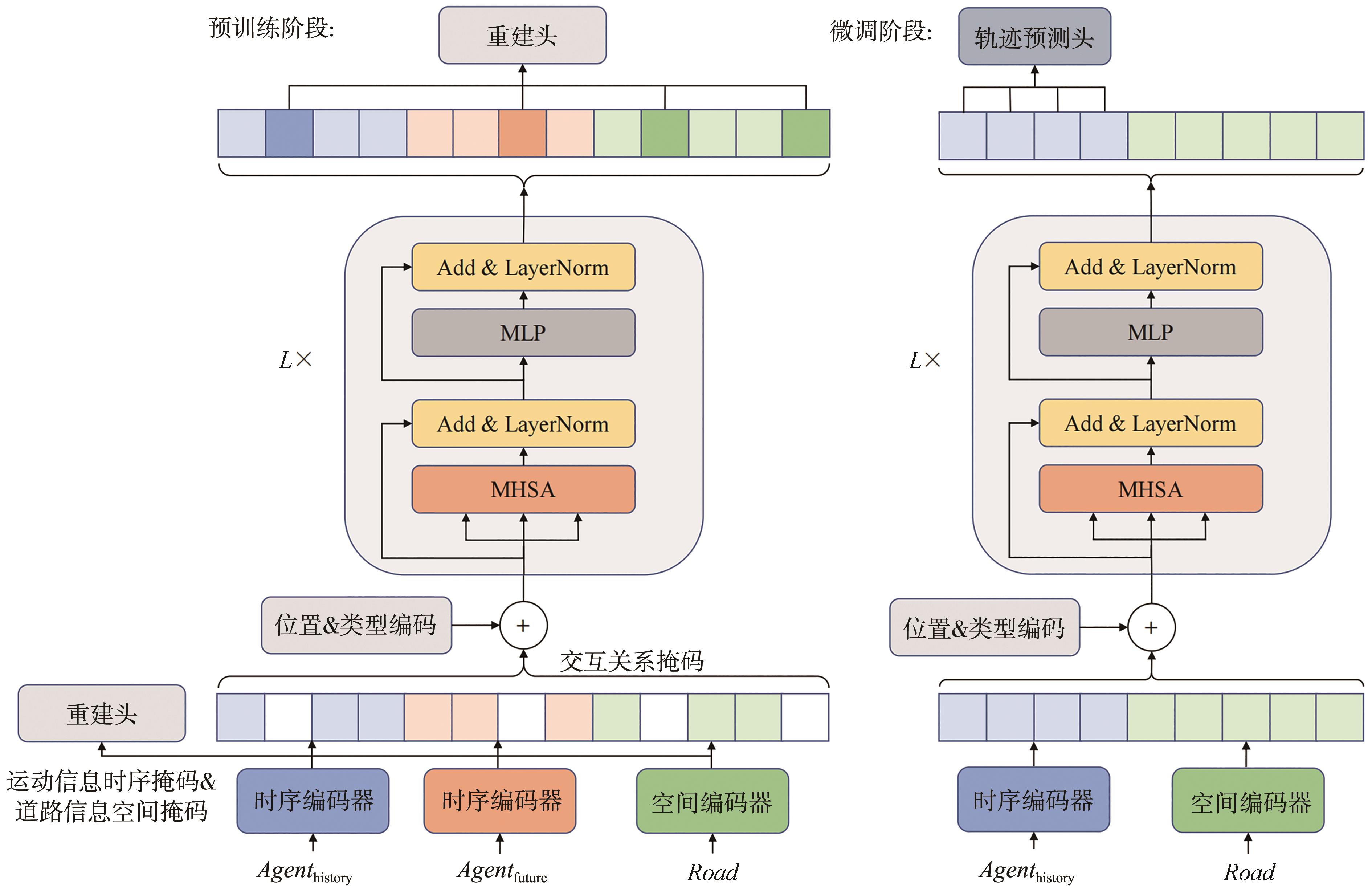
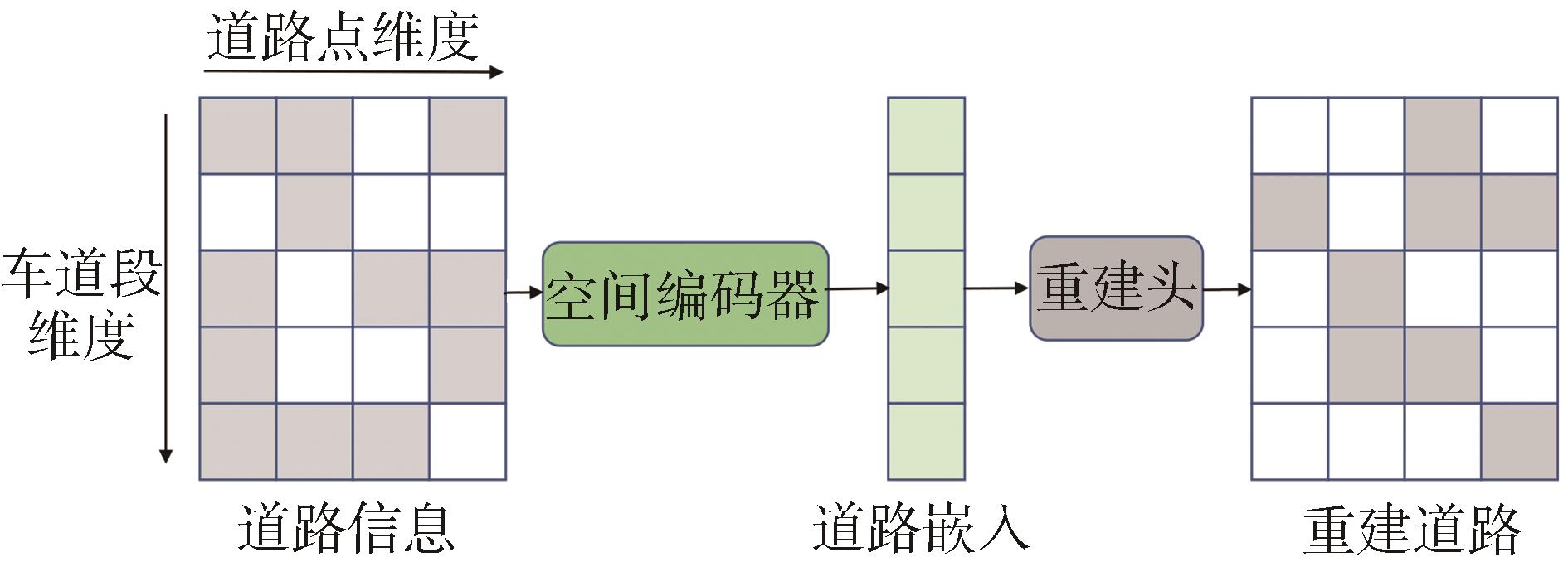
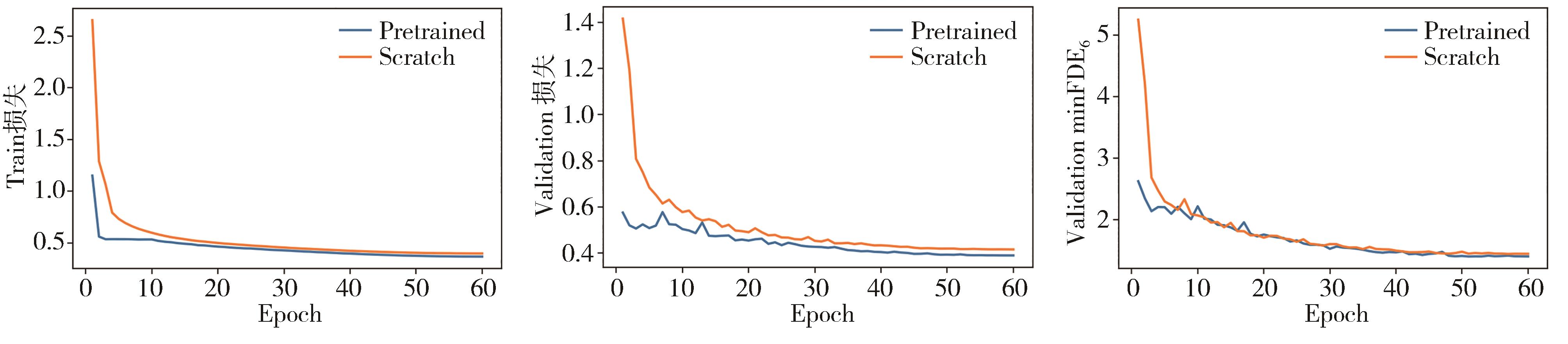
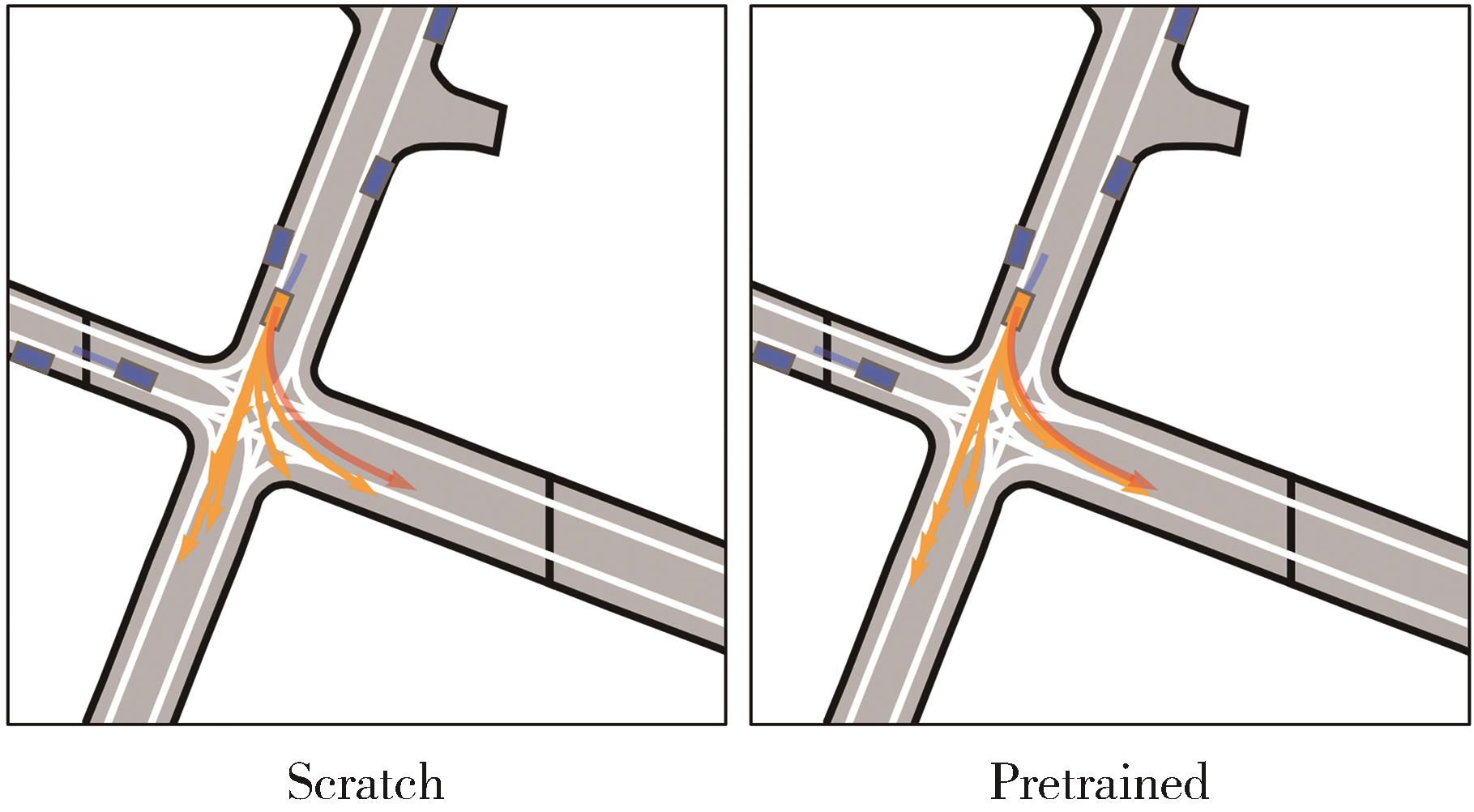
针对目前基于监督学习的轨迹预测模型数据利用效率低、精度有限的问题,提出一种轨迹预测模型及通用的自监督预训练策略。首先,基于Transformer搭建轻量化的轨迹预测模型,实现场景时序空间特征提取与交互关系建模;其次,设计运动信息时序掩码、道路信息空间掩码、交互关系掩码3类掩码重建任务对模型进行自监督预训练,以提升模型对场景通用特征的提取能力;最后,以预训练权重为初始化参数在下游任务中进行监督学习微调。在Argoverse2 Motion Forecasting数据集的实验表明,模型在预训练任务中能够很好地重建出交通场景,引入自监督预训练能够有效提升预测精度和数据利用效率,且对不同预测任务具有通用性,在单目标轨迹预测与多目标轨迹预测任务上minFDE6指标分别提升3.3%与3.7%。