汽车工程 ›› 2024, Vol. 46 ›› Issue (6): 985-994.doi: 10.19562/j.chinasae.qcgc.2024.06.005
王国栋1,2,刘立1,孟宇1( ),杜海平2,白国星1,顾青1
),杜海平2,白国星1,顾青1
收稿日期:2023-11-23
修回日期:2024-01-10
出版日期:2024-06-25
发布日期:2024-06-19
通讯作者:
孟宇
E-mail:myu@ustb.edu.cn
基金资助:
Guodong Wang1,2,Li Liu1,Yu Meng1(),Haiping Du2,Guoxing Bai1,Qing Gu1
Received:2023-11-23
Revised:2024-01-10
Online:2024-06-25
Published:2024-06-19
Contact:
Yu Meng
E-mail:myu@ustb.edu.cn
摘要:
精确计算不同避撞控制策略的极限避撞距离是自动驾驶汽车避撞决策与控制的基础。为厘清差动制动控制对避撞距离的影响,探究转向和差动制动集成控制的极限避撞能力,提高极限避撞距离的计算精度,本研究基于非线性车辆集成动力学和最优控制理论提出一种自动驾驶汽车极限避撞距离计算方法。首先,建立了非线性 7自由度车辆动力学模型和复合滑移工况的Pacejka轮胎模型。进一步地,基于上述模型构建了极限避撞距离求解问题,并将其转化为最优控制问题。然后,设计了高斯伪谱法将最优控制问题转化为非线性规划问题并求解。最后,分析了转向控制、制动控制、转向和制动集成控制、转向和差动制动集成控制的极限避撞距离,并与基于质点模型计算和CarSim测试的结果进行了对比。结果表明:转向和差动制动集成控制能够进一步减少自动驾驶汽车的避撞距离,显著提高其避撞能力;本研究所提方法能够显著提高极限避撞距离的计算精度和避撞决策结果的可靠性。
王国栋,刘立,孟宇,杜海平,白国星,顾青. 自动驾驶汽车避撞极限研究[J]. 汽车工程, 2024, 46(6): 985-994.
Guodong Wang,Li Liu,Yu Meng,Haiping Du,Guoxing Bai,Qing Gu. Research on Collision Avoidance Limit of Autonomous Vehicles[J]. Automotive Engineering, 2024, 46(6): 985-994.
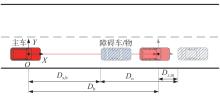
图1
纵向避撞控制"

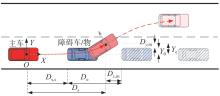
图2
横向避撞控制"
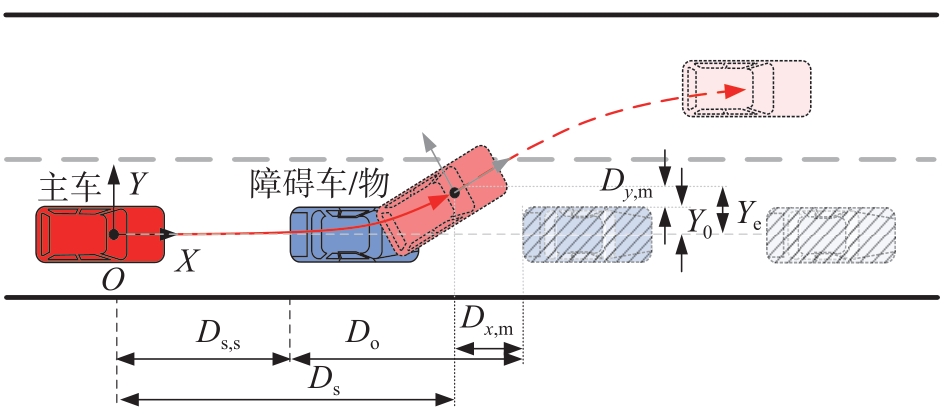
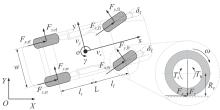
图3
7自由度车辆动力学模型"
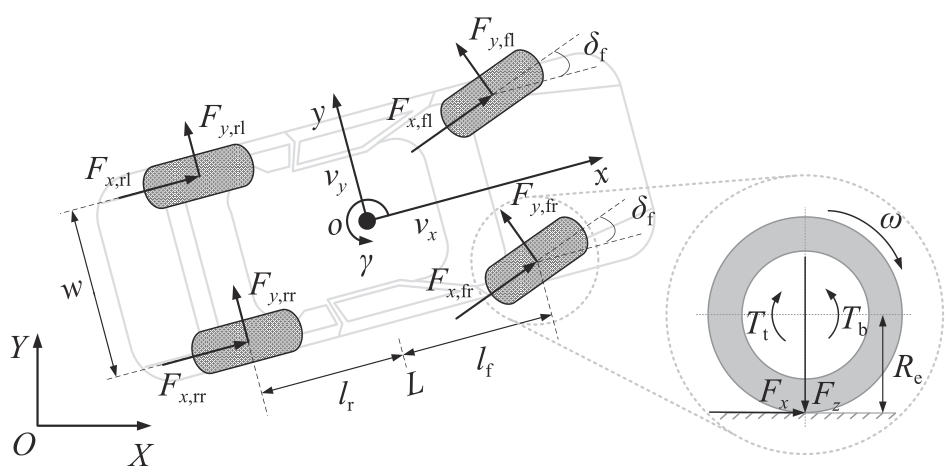
表1
车辆模型符号定义"
| 符号 | 定义 | 符号 | 定义 |
|---|---|---|---|
| vx | 纵向车速 | w | 轮距 |
| vy | 侧向车速 | m | 整车质量 |
| 横摆角速度 | Iz | 整车横摆惯量 | |
| 横摆角 | 车轮转动惯量 | ||
| 前轮转角 | 车轮旋转角速度 | ||
| Fy | 侧向轮胎力 | 车轮有效滚动半径 | |
| Fx | 纵向轮胎力 | 制动力矩 | |
| lf | 质心至前轴距离 | 驱动力矩 | |
| lr | 质心至后轴距离 | fl,fr,rl,rr | 左前/右前/左后/右后轮 |
表2
车辆模型参数"
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m | 1 231 kg | w | 1.481 m |
| Iz | 2 031.4 kg?m2 | 0.6 kg?m2 | |
| lf | 1.04 m | 0.298 m | |
| lr | 1.56 m | 13.760 3° |
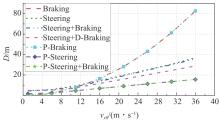
图4
μ = 0.8时不同初始车速下的极限避撞距离1"
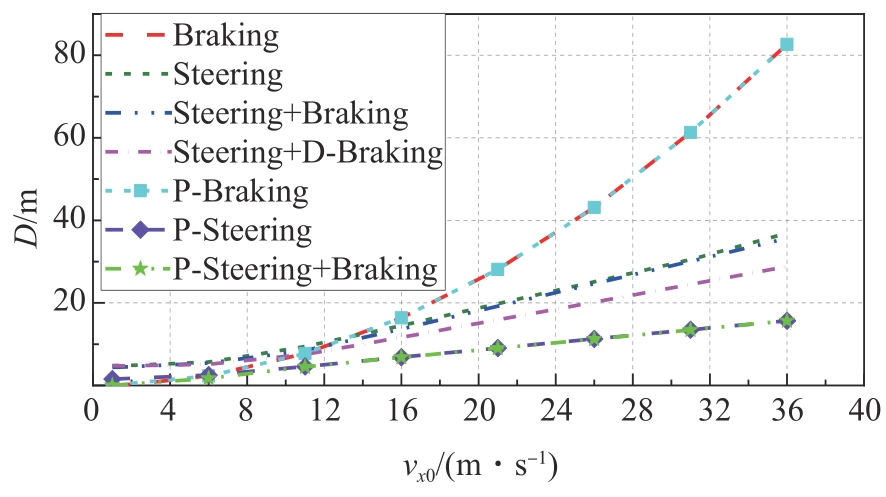
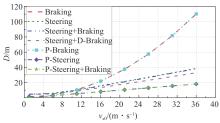
图5
μ = 0.6时不同初始车速下的极限避撞距离1"
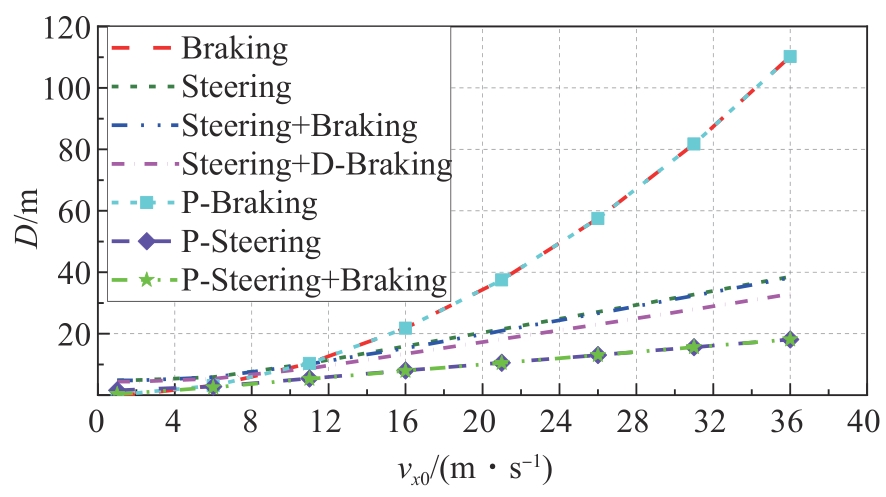
图6
μ = 0.4时不同初始车速下的极限避撞距离1"
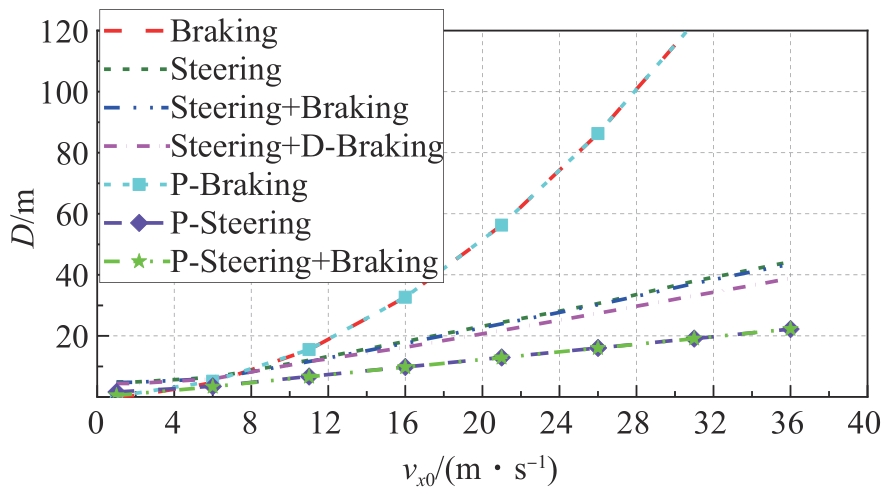
图7
μ = 0.2时不同初始车速下的极限避撞距离1"
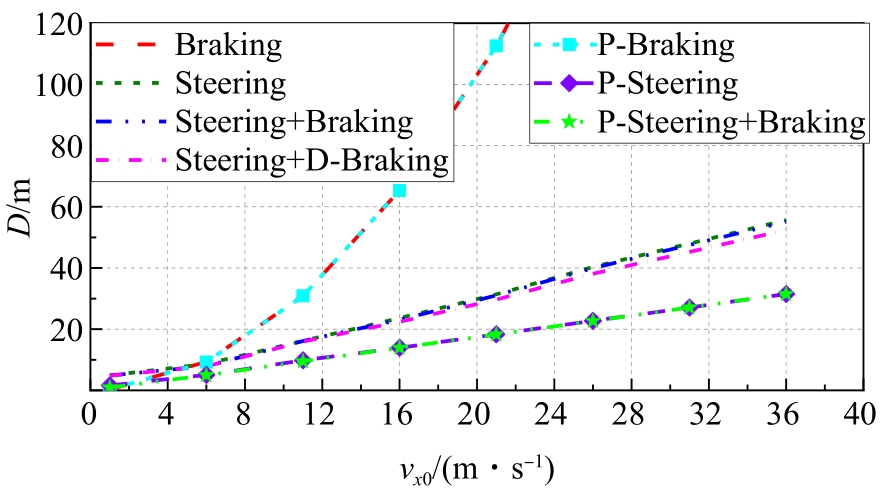
图8
μ = 0.8时不同初始车速下的极限避撞距离2"
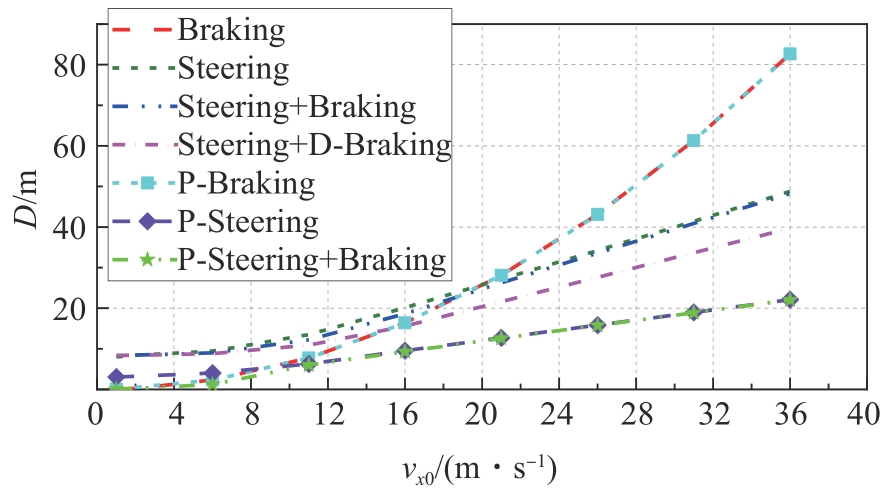
图9
μ = 0.6时不同初始车速下的极限避撞距离2"
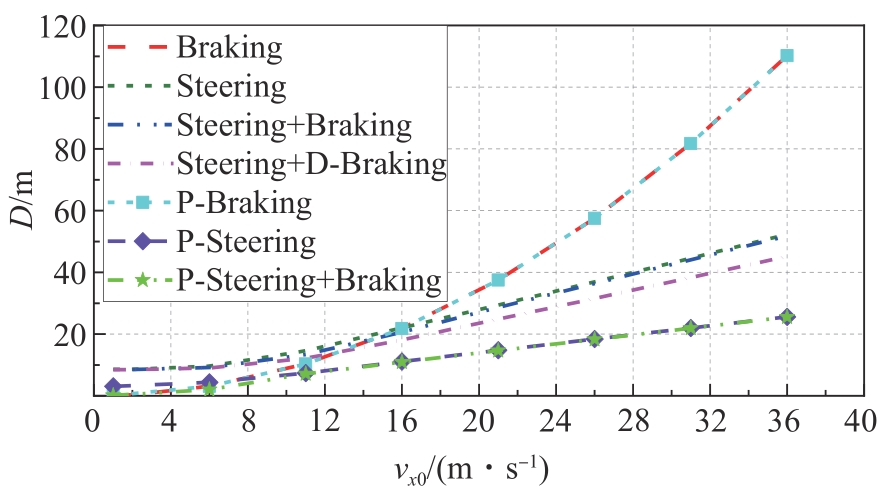
图10
μ = 0.4时不同初始车速下的极限避撞距离2"
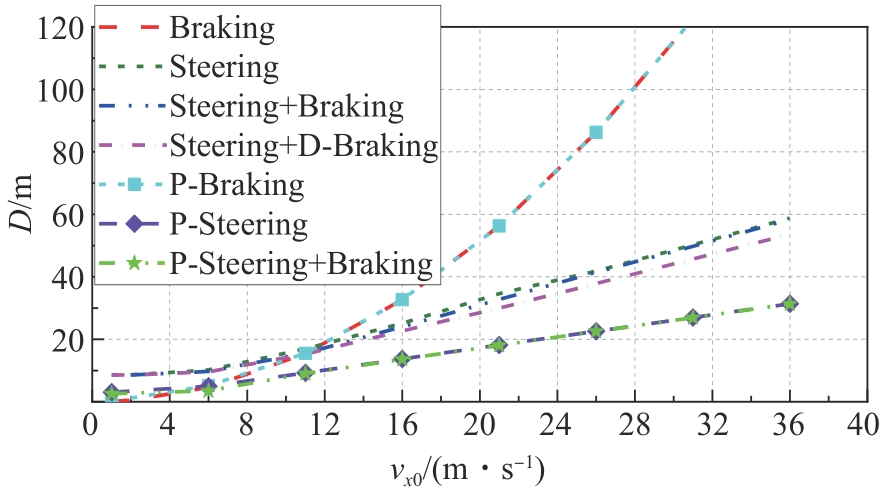
图11
μ = 0.2时不同初始车速下的极限避撞距离2"
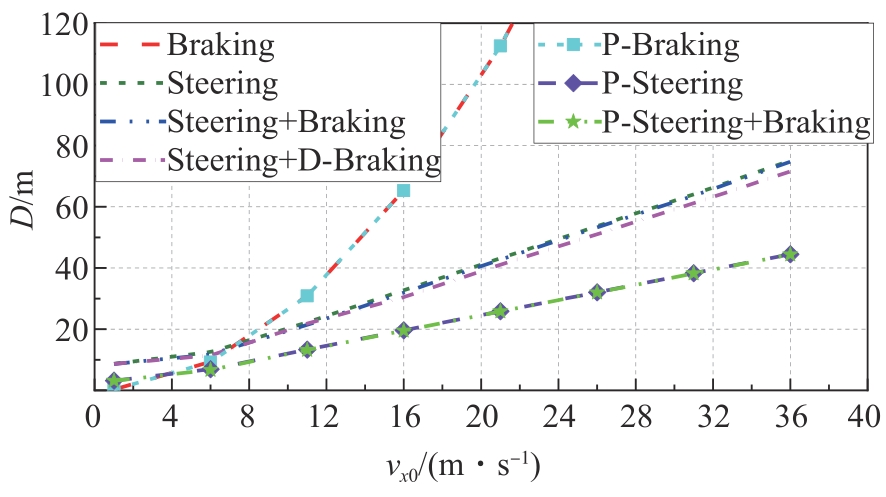
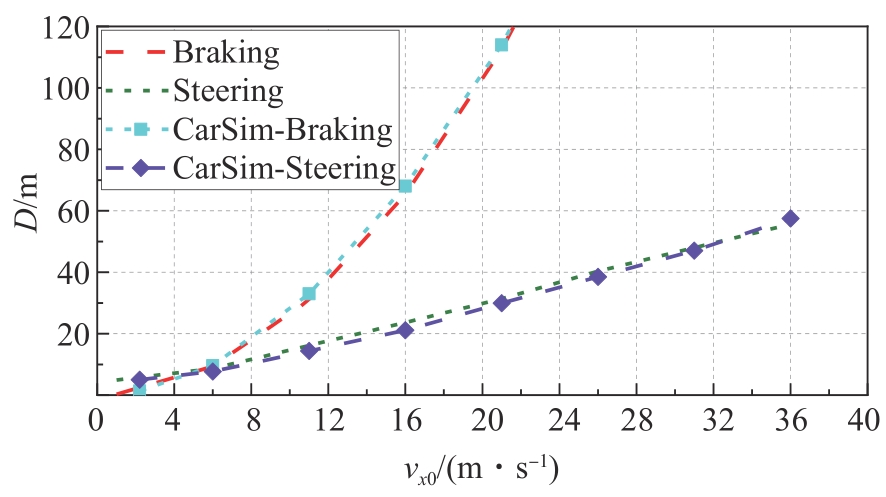
图12
μ = 0.8时不同初始车速下的极限避撞距离3"
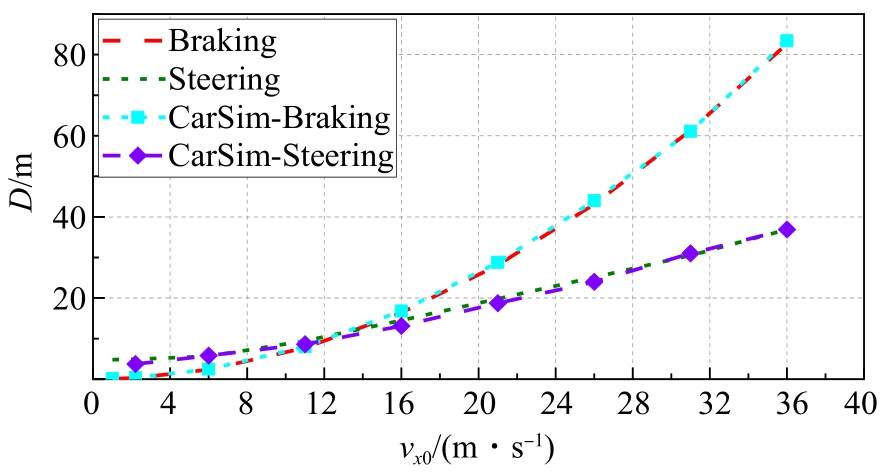
图13
μ = 0.2时不同初始车速下的极限避撞距离3"
| 1 | ZHOU M, WANG H, ZENG X, et al. Mortality, morbidity, and risk factors in China and its provinces, 1990–2017: a systematic analysis for the Global Burden of Disease Study 2017[J]. The Lancet, 2019, 394(10204): 1145-1158. |
| 2 | DISTNER M, BENGTSSON M Q, BROBERG T, et al. City safety-a system addressing rear-end collisions at low speeds[C].Proc. 21st International Technical Conference on the Enhanced Safety of Vehicles, 2009 (09-0371). |
| 3 | ZHANG R, LI K, WU Y, et al. A multi-vehicle longitudinal trajectory collision avoidance strategy using AEBS with vehicle-infrastructure communication[J]. IEEE Transactions on Vehicular Technology, 2022(2):71. |
| 4 | JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2016, 66(2): 952-964. |
| 5 | LI S, WANG G, CHEN G, et al. Tire state stiffness prediction for improving path tracking control during emergency collision avoidance[J]. IEEE Access, 2019, 7:179658-179669. |
| 6 | 李霖, 朱西产. 智能汽车自动紧急控制策略[J]. 同济大学学报(自然科学版), 2015, 43(11): 1735-1742. |
| LI L, ZHU X. Autonomous emergency control algorithm for intelligent vehicles[J]. Journal of Tongji University(Natural Science), 2015, 43(11): 1735-1742. | |
| 7 | FALCONE P, TSENG H E, ASGARI J, et al. Integrated braking and steering model predictive control approach in autonomous vehicles[J]. IFAC Proceedings Volumes, 2007, 40(10): 273-278. |
| 8 | ARARAT O, KURAL E, GUVENC B A. Development of a collision warning system for adaptive cruise control vehicles using a comparison analysis of recent algorithms[C]. 2006 IEEE Intelligent Vehicles Symposium. IEEE, 2006: 194-199. |
| 9 | SEILER P, SONG B, HEDRICK J K. Development of a collision avoidance system[J]. SAE Transactions, 1998: 1334-1340. |
| 10 | WANG J, ZHANG X, KANG H, et al. Test method and risk factor definition of forward collision warning system[J]. IEEE Access, 2020, 8: 47730-47740. |
| 11 | 李霖, 朱西产, 陈海林. 驾驶员制动和转向避撞极限[J]. 同济大学学报(自然科学版), 2016, 44(11): 1743-1748. |
| LI L, ZHU X, CHEN H. Drivers’ collision avoidance limit by braking and steering[J]. Journal of Tongji University(Natural Science), 2016, 44(11): 1743-1748. | |
| 12 | LI S, ZHAO Q. Research on the emergency obstacle avoidance strategy of intelligent vehicles based on a safety distance model[J]. IEEE Access, 2023. |
| 13 | WU H, LI Y, WU C, et al. A longitudinal minimum safety distance model based on driving intention and fuzzy reasoning[C]. 2017 4th International Conference on Transportation Information and Safety (ICTIS). IEEE, 2017: 158-162. |
| 14 | 袁伟, 蒋拯民, 郭应时. 制动与转向协调动作的车辆避撞控制研究[J]. 中国公路学报, 2019 32(1): 173-181. |
| YUAN W, JIANG Z, GUO Y. Research on vehicle active collision avoidance system based on the coordinated actions of braking and steering [J]. China Journal of Highway and Transport, 2019, 32(1): 173. | |
| 15 | SHAH J, BEST M, BENMIMOUN A, et al. Autonomous rear-end collision avoidance using an electric power steering system[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2015, 229(12): 1638-1655. |
| 16 | ECKERT A, HARTMANN B, SEVENICH M, et al. Emergency steer & brake assist: a systematic approach for system integration of two complementary driver assistance systems[C]. 22nd International Technical Conference on the Enhanced Safety of Vehicles (ESV), 2011: 13-16. |
| 17 | HATTORI Y, ONO E, HOSOE S. An optimum vehicle trajectory control for obstacle avoidance with the shortest longitudinal traveling distance[C]. IEEE International Conference on Mechatronics & Automation. IEEE, 2008. |
| 18 | MARTENSSON J, NYBACKA M, JERRELIND J, et al. Evaluation of safety distance in vehicle platoons by combined braking and steering[C]. 11th International Symposium on Advanced Vehicle Control, Sept 9-12, 2012, Seoul, Korea. Japan Society of Mechanical Engineers (JSAE), 2012. |
| 19 | HAJILOO R, ABROSHAN M, KHAJEPOUR A, et al. Integrated steering and differential braking for emergency collision avoidance in autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, PP(99):1-12. |
| 20 | WANG G, LIU L, MENG Y, et al. Integrated path tracking control of steering and differential braking based on tire force distribution[J]. International Journal of Control, Automation and Systems, 2022, 20(2):536-550. |
| 21 | WANG G, DU H, MENG Y, et al. Integrated path tracking control based on the dimension reduction model for improving real-time performance[J]. Vehicle System Dynamics, 2023: 1-21. |
| 22 | PACEJKA H B. Tire and vehicle dynamics[M]. 3rd ed. Great Britain: Elsevier Ltd, 2012. |
| 23 | 魏强. 车辆纵向力与侧向力集成控制研究[D]. 杭州: 浙江大学, 2015. |
| WEI Q. Research of the integrate control on vehicle longitude force and lateral force[D]. Hangzhou: Zhejiang University, 2015. | |
| 24 | WANG G, LIU Y, LI S, et al. New integrated vehicle stability control of active front steering and electronic stability control considering tire force reserve capability[J]. IEEE Transactions on Vehicular Technology, 2021, 70(3): 2181-2195. |
| 25 | 徐少兵, 李升波, 成波. 最优控制问题的 Legendre 伪谱法求解及其应用[J]. 控制与决策, 2014, 29(12): 2113-2120. |
| XU S B, LI S B, CHENG B. Theory and application of legendre pseudo-spectral method for solving optimal control problem[J]. Control and Decision, 2014, 29(12): 2113-2120. | |
| 26 | 杨希祥, 张为华. 基于Gauss 伪谱法的空空导弹最优中制导律设计[J]. 国防科技大学学报, 2013, 35(1): 28-32. |
| YANG X, ZHANG W. Midcourse guidance law optimal design for air-to-air missiles based on Gauss Pseudospectral Method[J]. Journal of National University of Defense Technology, 2013, 35(1): 28-32. | |
| 27 | 刘超越, 张成. 基于高斯伪谱法的二级助推战术火箭多阶段轨迹优化[J]. 兵工学报, 2019, 40(2): 292. |
| LIU C, ZHANG C. Multi-stage trajectory optimization of tactical two-stage booster rocket based on gauss pseudospectral method[J]. Acta Armamentarii, 2019, 40(2): 292. | |
| 28 | 唐晓峰, 杨林, 袁静妮. 基于高斯伪谱法的自动驾驶车辆状态研究[J]. 汽车工程, 2020, 42(5): 567-573. |
| TANG X, YANG L, YUAN J. Study on the states of autonomous vehiclebased on gaussian pseudospectral method[J]. Automotive Engineering, 2020, 42(5): 567-573. | |
| 29 | 钱立军, 吴冰, 仇多洋, 等. 基于分段高斯伪谱法的平行自主泊车路径规划[J]. 汽车工程, 2019, 41(12): 1401-1409. |
| QIAN L, WU B, QIU D, et al. Path planning for autonomous parallel parking based on piecewise Gauss pseudospectral method[J]. Automotive Engineering, 2019, 41(12): 1401-1409. |
| [1] | 杜国栋,邹渊,张旭东,孙文景,孙巍. 基于双估计强化学习结合前向预测控制的自动驾驶运动控制研究[J]. 汽车工程, 2024, 46(4): 564-576. |
| [2] | 张培兴,秦孔建,朱冰,赵健,范天昕,赵文博. 自动驾驶仿真多逻辑场景综合评价方法[J]. 汽车工程, 2024, 46(3): 375-382. |
| [3] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [4] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [5] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [6] | 陈龙,杨晨,蔡英凤,王海,李祎承. 基于多模态特征融合的行人穿越意图预测方法[J]. 汽车工程, 2023, 45(10): 1779-1790. |
| [7] | 朱冰,孙宇航,赵健,张培兴,范天昕,宋东鉴. 自动驾驶汽车测试场景基元自动提取方法[J]. 汽车工程, 2022, 44(11): 1647-1655. |
| [8] | 张志勇,龙凯,杜荣华,黄彩霞. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43(7): 995-1004. |
| [9] | 徐向阳,胡文浩,董红磊,王琰,肖凌云,李鹏辉. 自动驾驶汽车测试场景构建关键技术综述[J]. 汽车工程, 2021, 43(4): 610-619. |
| [10] | 唐晓峰, 杨林, 袁静妮. 基于高斯伪谱法的自动驾驶车辆状态研究*[J]. 汽车工程, 2020, 42(5): 567-573. |
| [11] | 钱立军, 吴冰, 仇多洋, 胡伟龙. 基于分段高斯伪谱法的平行自主泊车路径规划*[J]. 汽车工程, 2019, 41(12): 1401-1409. |
| [12] | 蔡英凤,臧勇,孙晓强,陈龙,王海,江浩斌,何友国. 自动驾驶汽车横向可拓预瞄切换控制系统研究*[J]. 汽车工程, 2018, 40(9): 1032-1039. |
|