汽车工程 ›› 2021, Vol. 43 ›› Issue (4): 610-619.doi: 10.19562/j.chinasae.qcgc.2021.04.019
徐向阳1,胡文浩1,2,董红磊2,王琰2,肖凌云2( ),李鹏辉3
),李鹏辉3
收稿日期:2020-06-25
修回日期:2020-08-14
出版日期:2021-04-25
发布日期:2021-04-23
通讯作者:
肖凌云
E-mail:xiaoly@dpac.gov.cn
基金资助:
Xiangyang Xu1,Wenhao Hu1,2,Honglei Dong2,Yan Wang2,Lingyun Xiao2(),Penghui Li3
Received:2020-06-25
Revised:2020-08-14
Online:2021-04-25
Published:2021-04-23
Contact:
Lingyun Xiao
E-mail:xiaoly@dpac.gov.cn
摘要:
面向自动驾驶汽车测试场景构建,本文首先对现有场景定义与架构进行了对比分析,并提出测试场景应涵盖场景要素和测试要素的共计10层信息;其次,归纳提出了包括具体场景直接构建、典型逻辑场景挖掘分析与推理演绎和具体场景重构衍生的场景构建方法体系;再次,从单一片段测试、组合片段测试和融合交通流的测试3个维度,系统梳理了主流虚拟场景测试应用方法;最后,从场景构建方法链和工具链的角度提出了研究展望。综述研究成果将为自动驾驶汽车测试与评价提供参考。
徐向阳,胡文浩,董红磊,王琰,肖凌云,李鹏辉. 自动驾驶汽车测试场景构建关键技术综述[J]. 汽车工程, 2021, 43(4): 610-619.
Xiangyang Xu,Wenhao Hu,Honglei Dong,Yan Wang,Lingyun Xiao,Penghui Li. Review of Key Technologies for Autonomous Vehicle Test Scenario Construction[J]. Automotive Engineering, 2021, 43(4): 610-619.
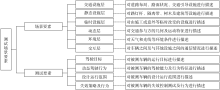
图 1
自动驾驶测试场景要素及分层架构"
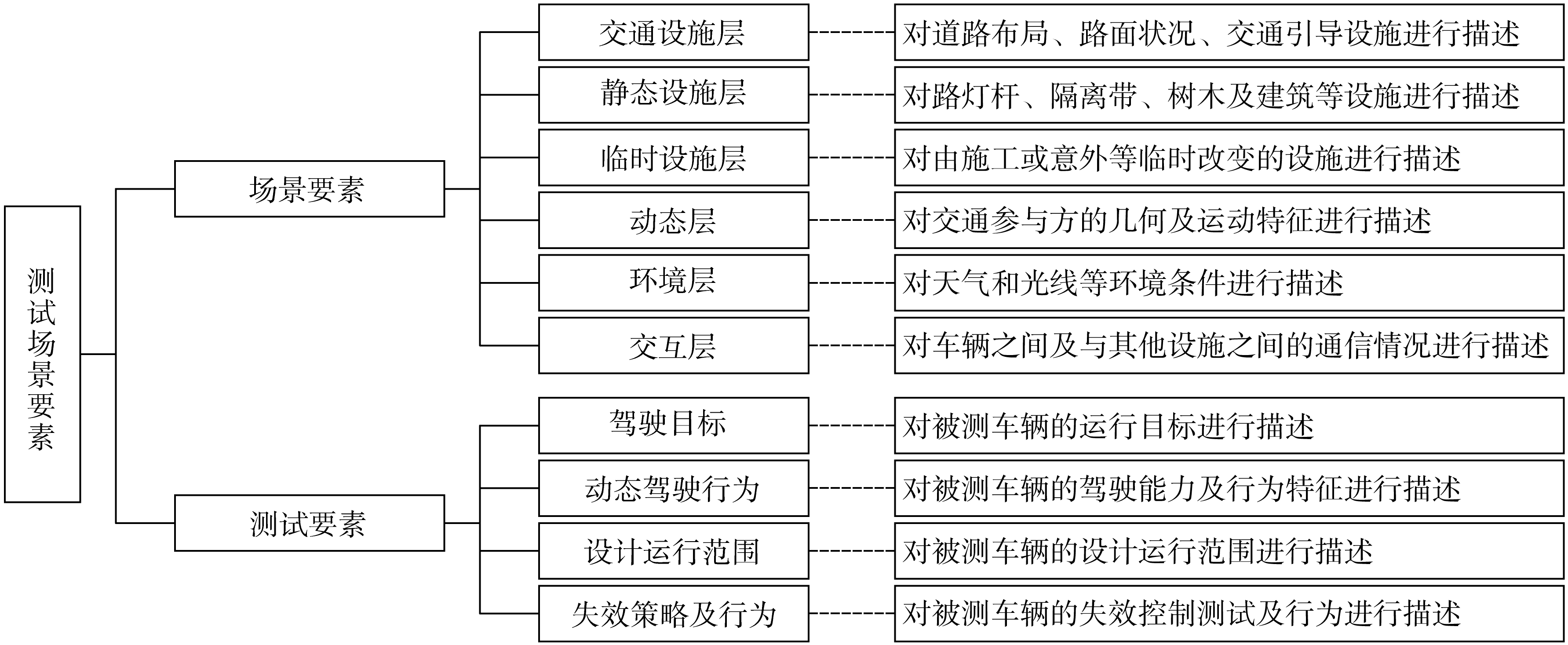
图 2
场景构建方法体系"
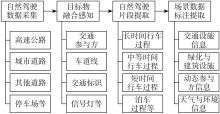
图 3
自然驾驶数据预处理流程"
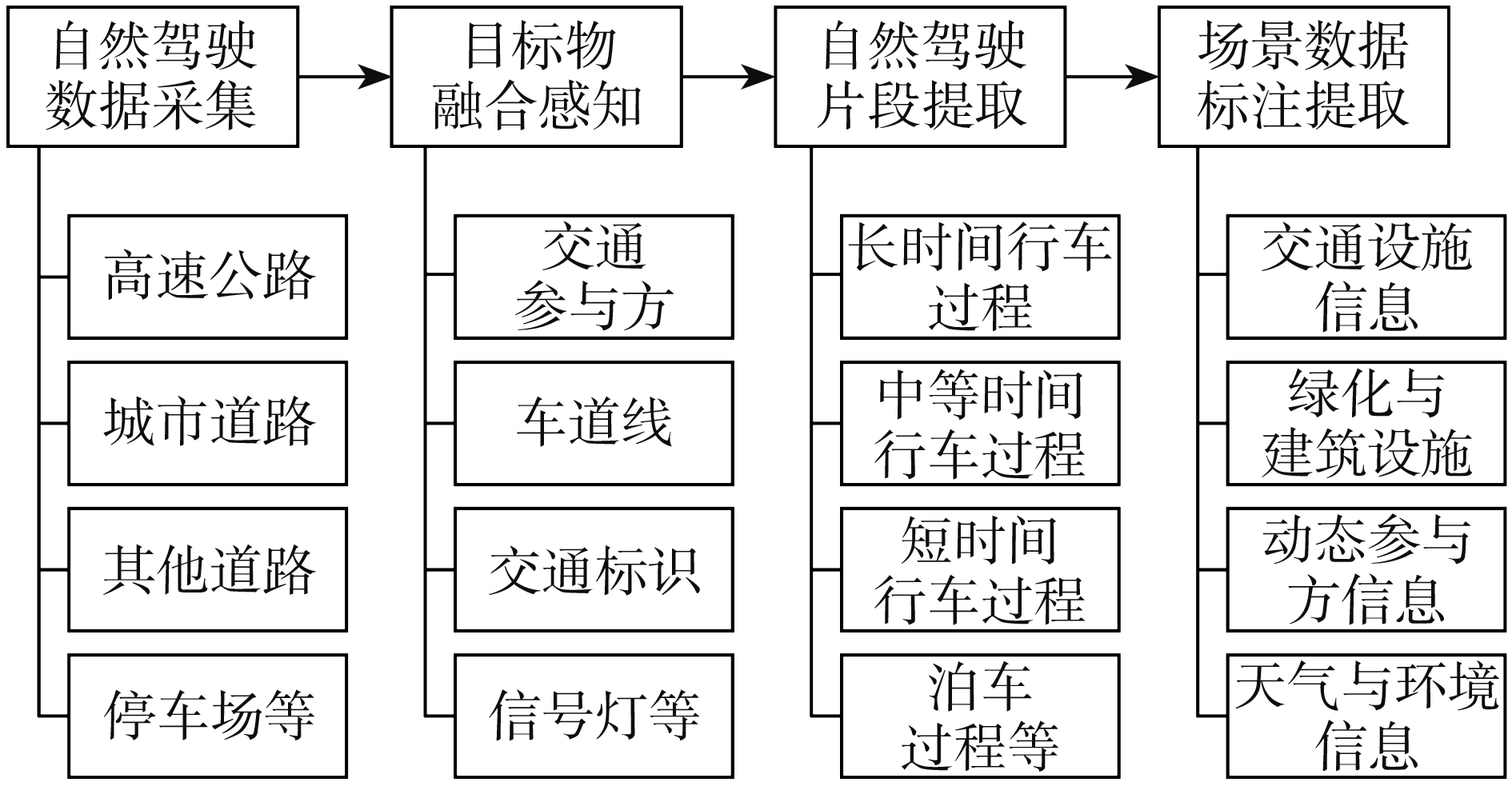

图 4
自动驾驶风险因子关注因素"
| 1 | LIERSCH C. Automated vehicles supporting “Towards Zero” iniative [J]. Journal of the Australasian College of Road Safety, 2017, 28(1), 49-53. |
| 2 | DIXIT V V, SAI C, NAIR D J, et al. Autonomous vehicles: disengagements, accidents and reaction times [J]. PLOS ONE, 2016, 11(12): e0168054. |
| 3 | Taxonomy and definitions for terms related to driving automation systems for on⁃road motor vehicles: SAE J3016 [S].2018. |
| 4 | WINNER H. ADAS, Quo Vadis? [M]. Springer, Cham, 2016. |
| 5 | RÖSENERCHRISTIAN, FAHRENKROG F, UHLIG A, et al. A scenario⁃based assessment approach for automated driving by using time series classification of human⁃driving behavior [C]. International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2016. |
| 6 | NHTSA. National statistics [R]. America: NHTSA, 2019. |
| 7 | KALRA N, PADDOCK S M. Driving to safety: how many miles of driving would it take to demonstrate autonomous vehicle reliability? [J]. Transportation Research Part A: Policy & Practice, 2016, 94:182-193. |
| 8 | 耿新力. 城区不确定环境下无人驾驶车辆行为决策方法研究[D]. 合肥:中国科学技术大学, 2017. |
| GENG X L. Research on behavior decision⁃making approaches for autonomous vehicle in urban uncertainty environments [D]. Hefei:University of Science and Technology of China, 2017. | |
| 9 | GEYER S, BALTZER M, FRANZ B, et al. Concept and development of a unified ontology for generating test and use⁃case catalogues for assisted and automated vehicle guidance [J]. IET Intelligent Transport Systems, 2013, 8(3): 183-189. |
| 10 | GO K, CARROLL J M. The blind men and the elephant: views of scenario⁃based system design [J]. Interactions, 2004, 11(6): 44-53. |
| 11 | NAJM WASSIM G, BASAV SEN. Analysis of light vehicle crashes and pre⁃crash scenarios based on the 2000 general estimates system [R]. America: NHTSA, 2003. |
| 12 | NAJM W G. Development of crash imminent test scenarios for integrated vehicle⁃based safety systems [C]. International Technical Conference on Enhanced Safety of Vehicles. 2007. |
| 13 | BÁLINT, ANDRÁS, FAGERLIND H, et al. A test⁃based method for the assessment of pre⁃crash warning and braking systems [J]. Accident Analysis & Prevention, 2013, 59:192-199. |
| 14 | NAJM W G. Description of light⁃vehicle pre⁃crash scenarios for safety applications based on vehicle⁃to⁃vehicle communications[R]. America: NHTSA, 2013. |
| 15 | ULBRICH S, MENZEL T, RESCHKA A, et al. Defining and substantiating the terms scene, situation, and scenario for automated driving [C]. IEEE International Conference on Intelligent Transportation Systems. IEEE, 2015: 982-988. |
| 16 | WALTHER W, PHILIPP J, et al. Test case variation and execution [R]. Germany: PEGASUS, 2019. |
| 17 | WALTHER W, PHILIPP J, et al. Scenario description [R]. Germany: PEGASUS, 2019. |
| 18 | MENZEL T, BAGSCHIK G, MAURER M. Scenarios for development, test and validation of automated vehicles [C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018. |
| 19 | 赵祥模, 陈南峰, 承靖钧,等. 基于整车在环仿真的自动驾驶汽车室内快速测试平台[J]. 中国公路学报, 2019, 32(6):124-136. |
| ZHAO X M, CHEN N F, CHENG J J, et al. An indoor rapid⁃testing platform for autonomous vehicle based on vehicle⁃in⁃the⁃loop simulation[J]. China Journal of Highway and Transport, 2019, 32(6):124-136. | |
| 20 | 朱冰,张培兴,赵健,等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19. |
| ZHU B, ZHANG P, ZHAO J, et al. Review of scenario⁃based virtual validation methods for automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(6):1-19. | |
| 21 | National Highway Traffic Safety Administration. A framework for automated driving system testable cases and scenarios[R]. Virginia Tech Transportation Institute, Blacksburg, DOT HS812623. 2018. |
| 22 | 舒红, 袁康, 修海林, 等. 自动驾驶汽车基础测试场景构建研究[J]. 中国公路学报, 2019, 32(11): 245-254. |
| SHU H, YUAN K, XIU H L, et al. Construction of basic test scenarios of automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(11): 245-254. | |
| 23 | 陈名扬.自动驾驶研究在自动驾驶汽车开发中的应用[D].上海:同济大学,2017. |
| CHEN M Y. Application of naturalistic driving study in development of automated vehicles [D]. Shanghai:Tongji University, 2017. | |
| 24 | 吴斌, 朱西产, 沈剑平, 等. 基于自然驾驶数据的危险评估算法研究[J]. 汽车工程, 2017,39(8):62-69. |
| WU B, ZHU X C, SHEN J P, et al. A study on risk assessment algorithm based on natural driving data [J]. Automotive Engineering, 2017,39(8):62-69. | |
| 25 | SUN X Y, ZHU X C, ZHANG K Y, et al. Automatic detection method research of incidents in China⁃FOT database[C]. International Conference on Intelligent Transportation Systems, 2016: 754-759. |
| 26 | WANG X, XU L H, SUN H B, et al. On-road vehicle detection and tracking using mmw radar and monovision fusion[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7):2075-2084. |
| 27 | ZHANG X, XU W D, DONG C Y, et al. Efficient L⁃shape fitting for vehicle detection using laser scanners[C]. 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2017. |
| 28 | 李英勃, 于波. 基于融合感知的场景数据提取技术研究[J]. 现代计算机, 2019(9):67-72. |
| LI Y B, YU B. Research on drive scenario extract technique based on sensors fusion[J]. Modern Computer, 2019(9):67-72. | |
| 29 | 袁泉, 李一兵. 车辆碰撞事故再现技术研究的现状与发展方向[J]. 公路交通科技, 2002, 19(2):122-125,130. |
| YUAN Q, LI Y B. Review and trend of the technology of vehicle crash reconstruction[J]. Journal of Highway and Transportation Research and Development, 2002, 19(2):122-125,130. | |
| 30 | 张雷, 李一兵. 道路交通事故再现分析结果的不确定性分析[J]. 公路交通科技, 2007, 24(12):140-143. |
| ZHANG L, LI Y B. Analysis of traffic accident reconstruction uncertainty[J]. Journal of Highway and Transportation Research and Development, 2007, 24(12):140-143. | |
| 31 | 邹铁方, 胡林, 李平凡, 等. 一种分析事故再现仿真结果不确定性的多响应面-均匀设计法[J]. 汽车工程, 2017,39(1):45-50,76. |
| ZOU T F, HU L, LI P F, et al. A multi⁃response⁃surface uniform design method for analyzing uncertainty of simulation results in accident reconstruction [J]. Automotive Engineering, 2017,39(1):45-50,76. | |
| 32 | 袁泉, 李一兵. 车辆交通事故再现能量方法的不确定度评定[J]. 中国公路学报, 2002, 15(1):110-112. |
| YUAN Q, LI Y B. Uncertainty evaluation on the energy method of vehicle traffic accident reconstruction [J]. China Journal of Highway and Transport, 2002, 15(1):110-112. | |
| 33 | 秦海力. 汽车碰撞事故再现与驾驶员损伤风险分析[D]. 重庆: 重庆理工大学, 2018. |
| QIN H L. Analysis of vehicle collision accident reconstruction and driver’s damage risk [D]. Chongqing: Chongqing University of Technology, 2018. | |
| 34 | 机动车运行安全技术条件: [S]. 2017. |
| Technical specifications for safety of power⁃driven vehicles operating on roads: [S]. 2017. | |
| 35 | JONES W D. Black boxes get green light [car crash data recorders][J]. IEEE Spectrum, 2004, 41(12):14-16. |
| 36 | 邱金龙, 李奎, 苏森, 等. 汽车事故数据记录器数据规范及应用进展综述[J]. 汽车工程学报, 2017, 7(2):79-85. |
| QIU J L, LI K, SU S, et al. Review on regulation and application progress of vehicle EDR data[J]. Chinese Journal of Automotive Engineering, 2017, 7(2): 79-85. | |
| 37 | 电动汽车远程服务与管理系统技术规范 第3部分:通信协议与数据格式: [S]. 2016. |
| Technical specifications of remote service and management system for electric vehicles⁃Part 3: communication protocol and data format: [S]. 2016. | |
| 38 | VUFO. PRE-CRASH-MATRIX (PCM) V5.0FORMAT [EB/OL]. (2020-06-17). . |
| 39 | WASSIM G N, JOHN D S, MIKIO Y. Pre⁃crash scenario typology for crash avoidance research [R]. America: NHTSA, 2007. |
| 40 | NAJM W G, SMITH J D. Development of crash imminent test scenarios for integrated vehicle⁃based safety systems (IVBSS) [R]. America: NHTSA, 2007. |
| 41 | FAGERLIND H, HEINIG I, MATIAS V. Analysis of accident data for test scenario definition in the ASSESS project [M]. Bundesanstalt für Straßenwesen (BASt), 2010. |
| 42 | PHILIPPE N, PETE T, et al. Pre⁃crash scenarios at road junctions: a clustering method for car crash data [J]. Accident Analysis and Prevention, 2017 (107):137–151. |
| 43 | LENARD J, BADEA⁃ROMERO A, DANTON R. Typical pedestrian accident scenarios for the development of autonomous emergency braking test protocols [J]. Accident Analysis and Prevention, 2014, 73(73):73-80. |
| 44 | 苏江平, 陈君毅, 王宏雁, 等. 基于中国危险工况的行人交通冲突典型场景提取与分析[J]. 交通与运输(学术版), 2017(1):209-214. |
| SU J P, CHEN J Y, WANG H Y, et al. Establishment and analysis on typical road traffic near⁃crash scenarios related to pedestrian in China [J]. Traffic & Transportation, 2017(1):209-214. | |
| 45 | 刘颖, 贺锦鹏, 刘卫国, 等. 自动紧急制动系统行人测试场景的研究[J]. 汽车技术, 2014(3):35-39. |
| LIU Y, HE J P, LIU W G, et al. Research on test scenarios for aeb pedestrian system [J]. Automobile Technology, 2014(3):35-39. | |
| 46 | 胡林,易平,黄晶, 等.基于真实事故案例的自动紧急制动系统两轮车测试场景研究[J].汽车工程,2018,40(12):1435-1446. |
| HU L, YI P,HUANG J, et al. A research on test scenes of two⁃wheeled vehicles for automatic emergency braking system based on real accident cases [J]. Automotive Engineering, 2018, 40(12):1435-1446. | |
| 47 | CAO Y, XIAO L Y, DONG H L, et al. Typical pre⁃crash scenarios reconstruction for two⁃wheelers and passenger vehicles and its application in parameter optimization of AEB system based on NAIS database. [C]. Proceedings of the 26th International Technical Conference on the Enhanced Safety of Vehicles (ESV),2019. |
| 48 | SUI B, LUBBE N, BARGMAN J, et al. A clustering approach to developing car⁃to⁃two⁃wheeler test scenarios for the assessment of automated emergency braking in china using in⁃depth Chinese crash data[J]. Accident Analysis & Prevention, 2019, 132: 105242. |
| 49 | Road vehicles⁃safety of the intended functionality: ISO/PAS 2144 |
| 82019 [S]. 2019. | |
| 50 | SARKER A, SHEN H, RAHMAN M, et al. A review of sensing and communication, human factors, and controller aspects for information⁃aware connected and automated vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2019:1-23. |
| 51 | ROSIQUE F, NAVARRO P J, FERNÁNDEZ, et al. A systematic review of perception system and simulators for autonomous vehicles research[J]. Sensors, 2019, 19(3). |
| 52 | FOR W K, LEMAN K, ENG H L, et al. A multi⁃camera collaboration framework for real⁃time vehicle detection and license plate recognition on highways [C]. Intelligent Vehicles Symposium. IEEE, 2008. |
| 53 | KIM J, HONG S, BAEK J, et al. Autonomous vehicle detection system using visible and infrared camera [C]. International Conference on Control. IEEE, 2012. |
| 54 | STROHM K M, BLOECHER H L, SCHNEIDER R, et al. Development of future short range radar technology [C]. European Radar Conference, 2005. |
| 55 | VANLEEUWEN M B, GROEN F C A. Vehicle detection with a mobile camera: spotting midrange, distant, and passing cars [J]. IEEE Robotics & Automation Magazine, 2005, 12(1):37-43. |
| 56 | THORNTON D A, REDMILL K, COIFMAN B. Automated parking surveys from a LIDAR equipped vehicle [J]. Transportation Research Part C: Emerging Technologies, 2014, 39:23-35. |
| 57 | LIERS H. Analysis of the accident scenario of powered two⁃wheelers on the basis of real⁃world accidents[M]. Bundesanstalt für Straßenwesen (BASt), 2013. |
| 58 | BOSCH. Predictive road⁃condition services [R]. Germany: BOSCH, 2018. |
| 59 | BECHTLOFF J, ISERMANN R. A redundant sensor system with driving dynamic models for automated driving [J]. Internationales Stuttgarter Symposiumpp, 2015:755-774. |
| 60 | 方芳. 几种常见车路协同通信技术的比较研究[C]. 第十一届中国智能交通年会大会论文集,2016:1028-1033. |
| FANG F. Research of cooperative vehicle⁃infrastructure communication technology[C]. Proceedings of the 11th China Intelligent Transportation Conference, 2016:1028-1033. | |
| 61 | 李克强,戴一凡,李升波,等.智能网联汽车(ICV)技术的发展现状及趋势[J].汽车安全与节能学报,2017,8(1):1-14. |
| LI K Q, DAI Y F, LI S B, et al. State⁃of⁃the⁃art and technical trends of intelligent and connected vehicles[J]. Automotive Safety and Energy,2017,8(1):1-14. | |
| 62 | 张伟, 田丽萍, 梁玉, 等. 面向车联网多点协作联合传输的安全认证与密钥更新方法[J]. 中国公路学报, 2019, 32(6):308-318. |
| ZHANG W, TIAN L P, LIANG Y, et al. Key management scheme to secure coordinated multi⁃point joint transmission for vehicular networks[J]. China Journal of Highway and Transport, 2019, 32(6):308-318. | |
| 63 | WANG L B,王含笑,赵千,等.智能路面发展与展望[J].中国公路学报,2019,32(4):50-72. |
| WANG L B, WANG H X, ZHAO Q, et al. Development and prospect of intelligent pavement[J]. China Journal of Highway and Transport, 2019,32(4):50-72. | |
| 64 | 陈山枝, 胡金玲, 时岩,等. LTE-V2X车联网技术、标准与应用[J]. 电信科学, 2018, 34(4):1-11. |
| CHEN S Z, HU J L, SHI Y, et al. Technologies, standards and applications of LTE⁃V2X for vehicular networks[J]. Telecommunications Science, 2018, 34(4):1-11. | |
| 65 | SCHULDT F , RESCHKA A , MAURER M. A method for an efficient, systematic test case generation for advanced driver assistance systems in virtual environments[M]. Springer, Cham, 2018. |
| 66 | FELLNER A, KRENN W, SCHLICK R, et al. Model⁃based, mutation⁃driven test⁃case generation via heuristic⁃guided branching search[J]. Acm Transactions on Embedded Computing Systems, 2019, 18(1):1-28. |
| 67 | XIA Q, DUAN J, GAO F, et al. Automatic generation method of test scenario for ADAS based on complexity[C]. SAE International, 2017. |
| 68 | ZHAO D, LAM H, PENG H, et al. Accelerated evaluation of automated vehicles safety in lane⁃change scenarios based on importance sampling techniques[J]. IEEE Transactions on Intelligent Transportation Systems, 2016:1-13. |
| 69 | HUANG Z, ZHAO D, LAM H, et al. Evaluation of automated vehicles in the frontal cut⁃in scenario⁃an enhanced approach using piecewise mixture models[C]. IEEE International Conference on Robotics & Automation, 2017. |
| 70 | ZHAO D, PENG H, BAO S, et al. Accelerated evaluation of automated vehicles using extracted naturalistic driving data[C]. The Dynamics of Vehicles on Roads and Tracks⁃Proceedings of the 24th Symposium of the International Association for Vehicle System Dynamics, 2015. |
| 71 | ZHAO D, HUANG X, PENG H, et al. Accelerated evaluation of automated vehicles in car⁃following maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2017:1-12. |
| 72 | HUANG Z, LAM H, LEBLANC D J, et al. Accelerated evaluation of automated vehicles using piecewise mixture models[J]. IEEE Transactions on Intelligent Transportation Systems, 2017:1-11. |
| 73 | HUANG Z, LAM H, ZHAO D, et al. An accelerated testing approach for automated vehicles with background traffic described by joint distributions[J]. International Conference on Intelligent Transportation Systems, 2017: 933-938. |
| 74 | 成波, 孔凡忠, 等. 中国自动驾驶仿真技术研究报告(2019)[R]. 当家移动绿色互联网技术集团有限公司(51VR), 2019. |
| CHENG B, KONG F Z, et al. Annual research report on autonomous vehicle simulation in China (2019) [R]. 51 WORLD, 2019. | |
| 75 | 冯屹, 王兆, 等. 自动驾驶测试场景技术发展与应用[M]. 北京:机械工业出版社, 2020:110-113. |
| FENG Y, WANG Z, et al. Development and application of automated⁃driving test scenario technology[M]. Beijing: China Machine Press, 2020:110-113. | |
| 76 | 腾讯云. 腾讯TAD Sim仿真平台,助力破解自动驾驶落地困境[EB/OL]. (2019-11-13). . |
| CloudTencent. Tencent TAD Sim simulation platform helps to solve the landing dilemma of automated driving [EB/OL]. (2019-11-13). . | |
| 77 | ISO. STANDARES BY ISO//TC 22/SC 33 [EB/OL]. (2020-06-17). . |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [3] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [4] | 陈龙,杨晨,蔡英凤,王海,李祎承. 基于多模态特征融合的行人穿越意图预测方法[J]. 汽车工程, 2023, 45(10): 1779-1790. |
| [5] | 朱冰,孙宇航,赵健,张培兴,范天昕,宋东鉴. 自动驾驶汽车测试场景基元自动提取方法[J]. 汽车工程, 2022, 44(11): 1647-1655. |
| [6] | 张志勇,龙凯,杜荣华,黄彩霞. 自动驾驶汽车高速超车轨迹跟踪协调控制[J]. 汽车工程, 2021, 43(7): 995-1004. |
| [7] | 吴光强, 陈洁. 乘用车液力变矩器优化设计研究综述*[J]. 汽车工程, 2020, 42(8): 1090-1096. |
| [8] | 金辉, 张子豪. 基于自适应动态规划的HEV能量管理研究综述*[J]. 汽车工程, 2020, 42(11): 1490-1496. |
| [9] | 蔡英凤,臧勇,孙晓强,陈龙,王海,江浩斌,何友国. 自动驾驶汽车横向可拓预瞄切换控制系统研究*[J]. 汽车工程, 2018, 40(9): 1032-1039. |
|