汽车工程 ›› 2024, Vol. 46 ›› Issue (8): 1403-1413.doi: 10.19562/j.chinasae.qcgc.2024.08.007
• • 上一篇
颜伏伍1,2,3,向博文1,2,3,胡杰1,2,3( ),陈锐鹏1,2,3,张志豪1,2,3,刘昊岩1,2,3,高宠智4
),陈锐鹏1,2,3,张志豪1,2,3,刘昊岩1,2,3,高宠智4
Fuwu Yan1,2,3,Bowen Xiang1,2,3,Jie Hu1,2,3(),Ruipeng Chen1,2,3,Zhihao Zhang1,2,3,Haoyan Liu1,2,3,Chongzhi Gao4
摘要:
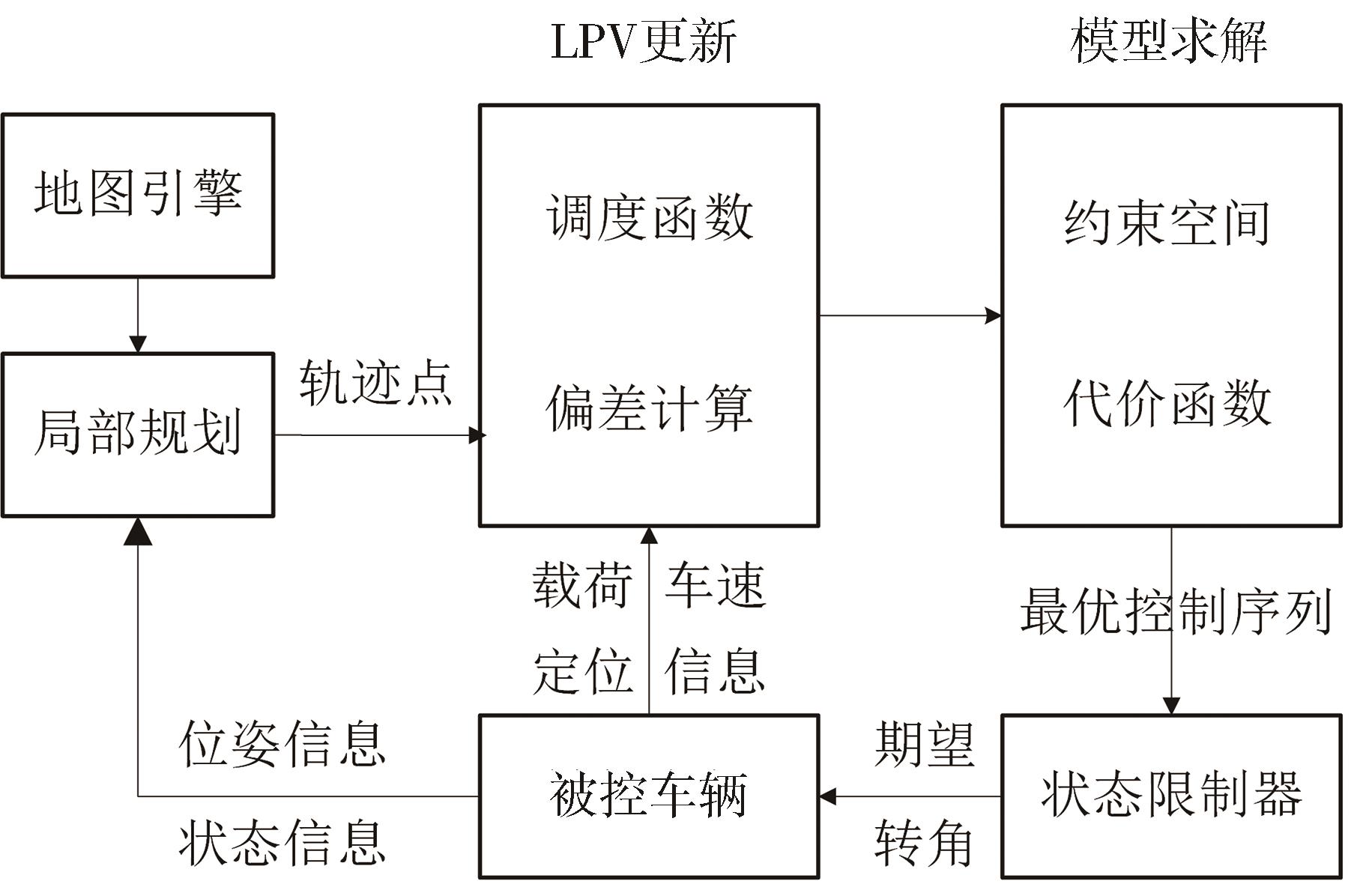
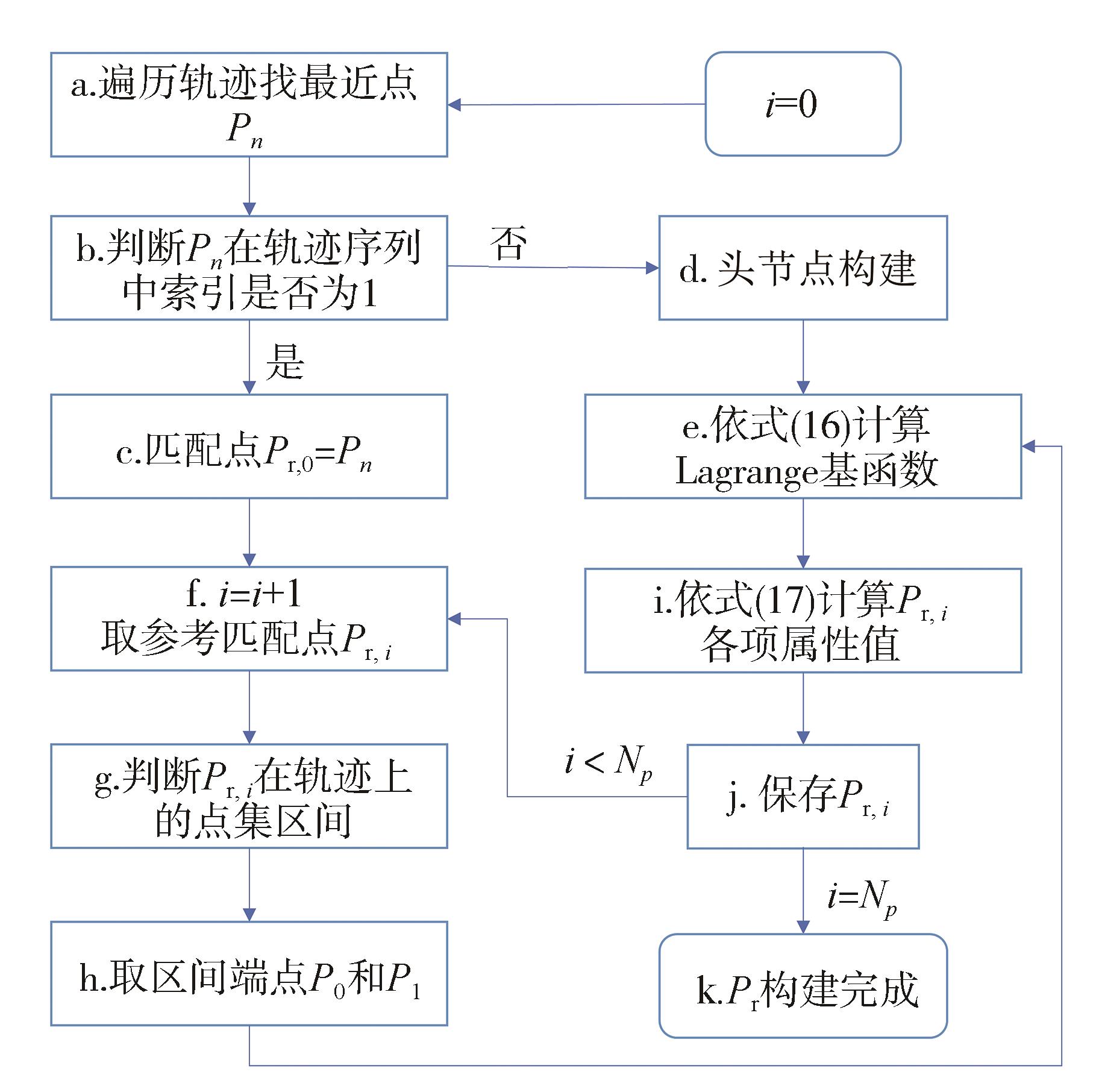
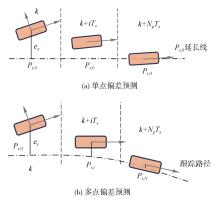
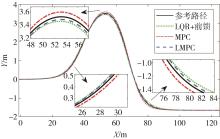
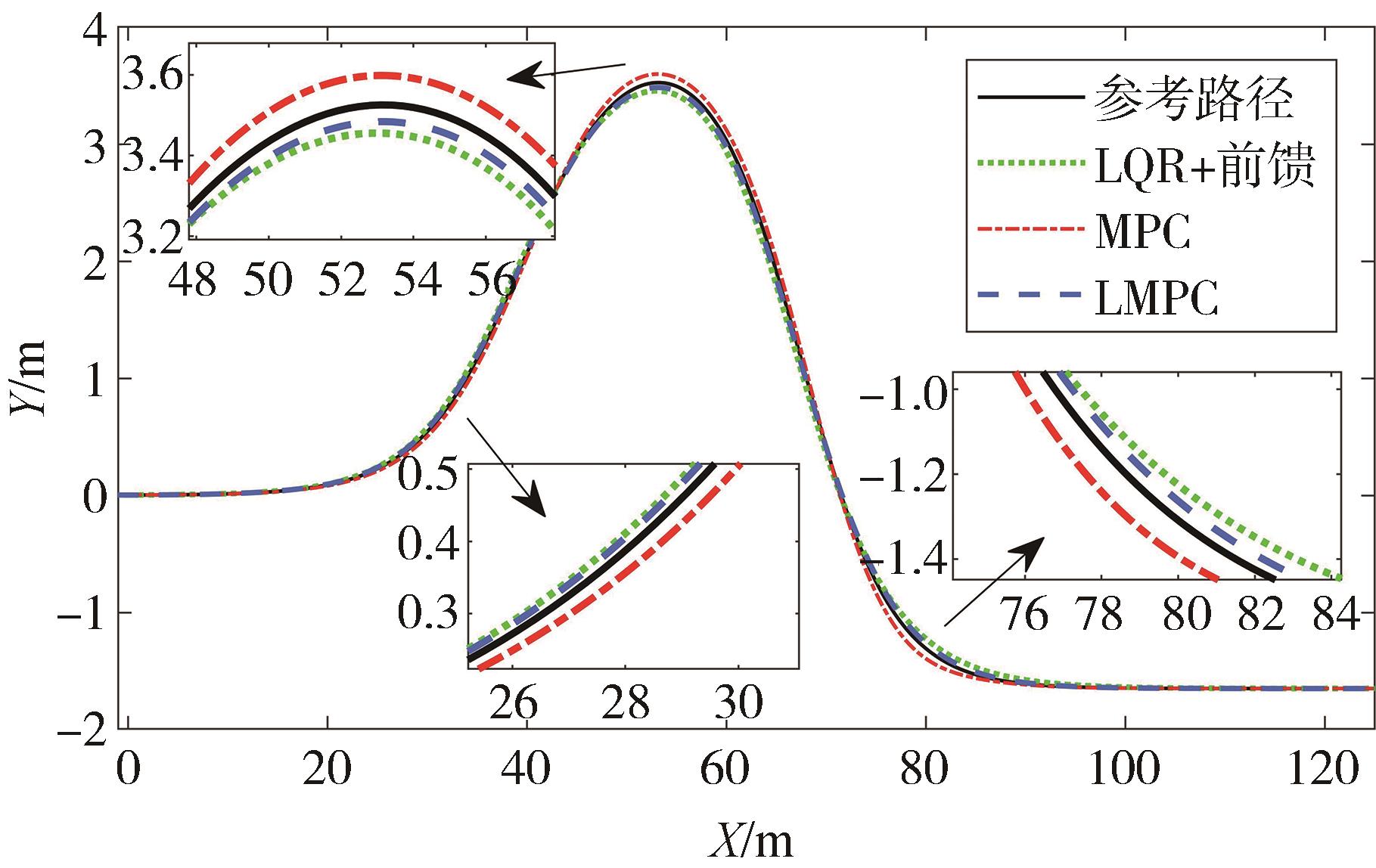
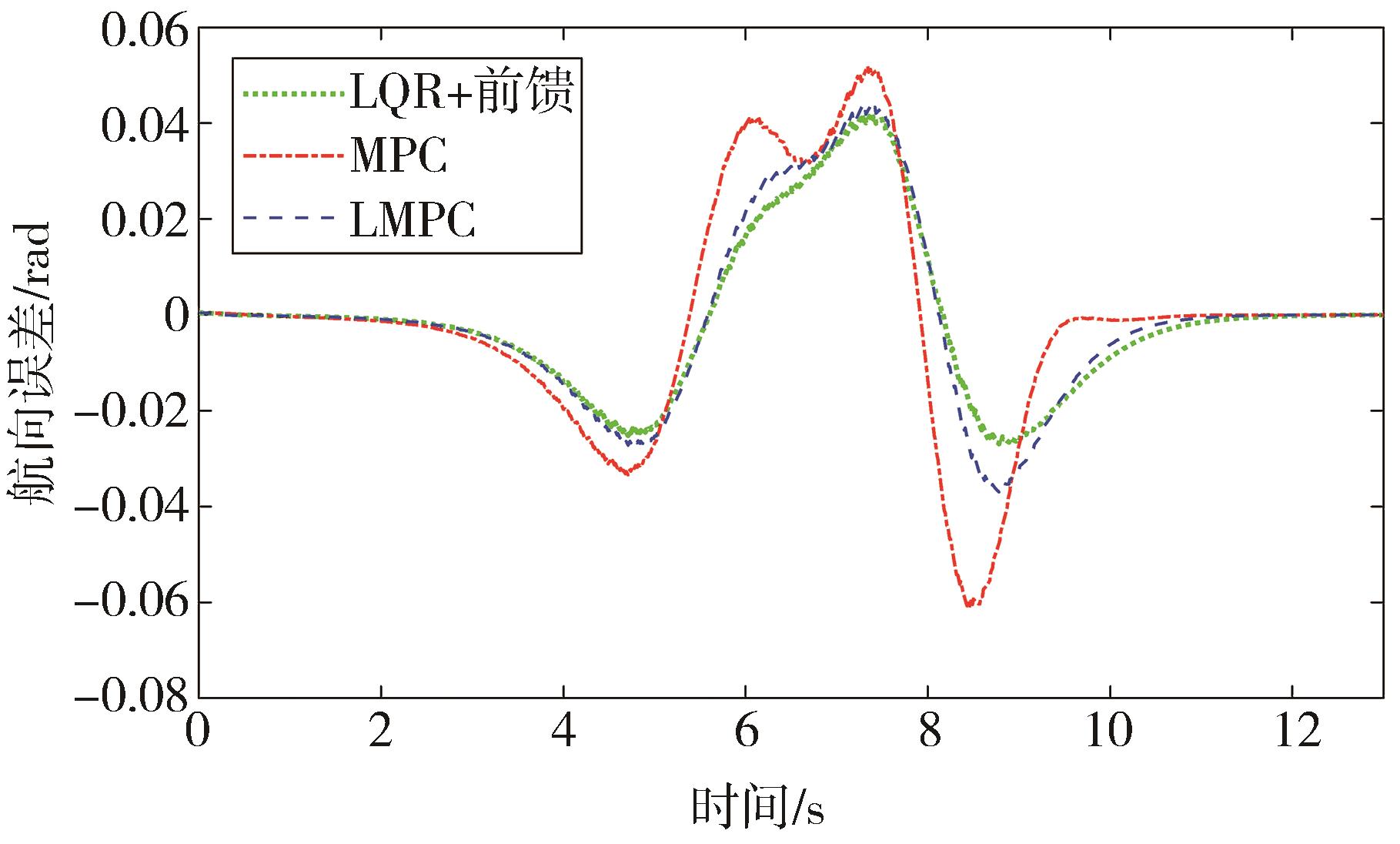
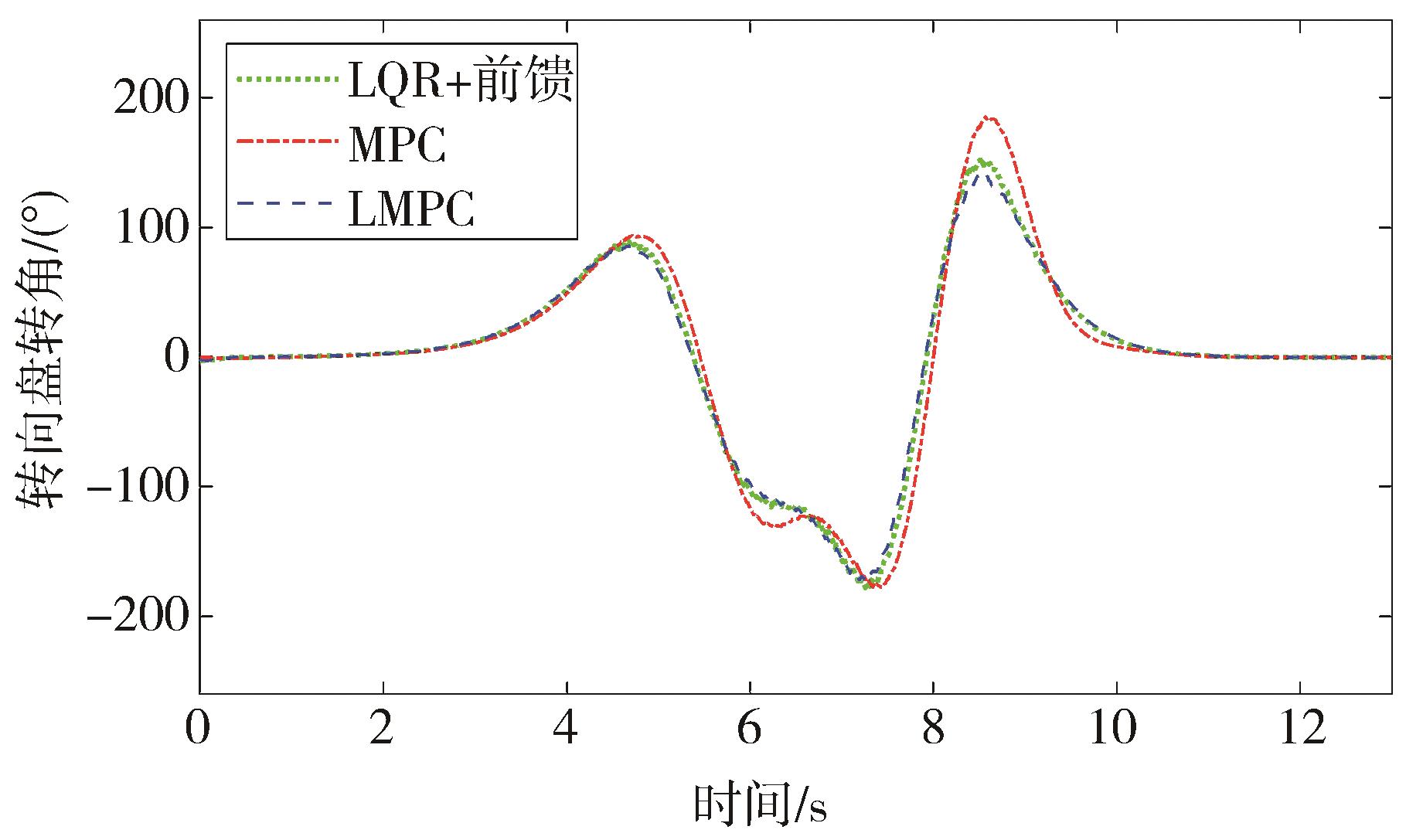
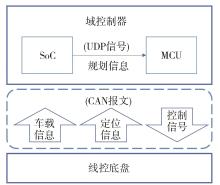
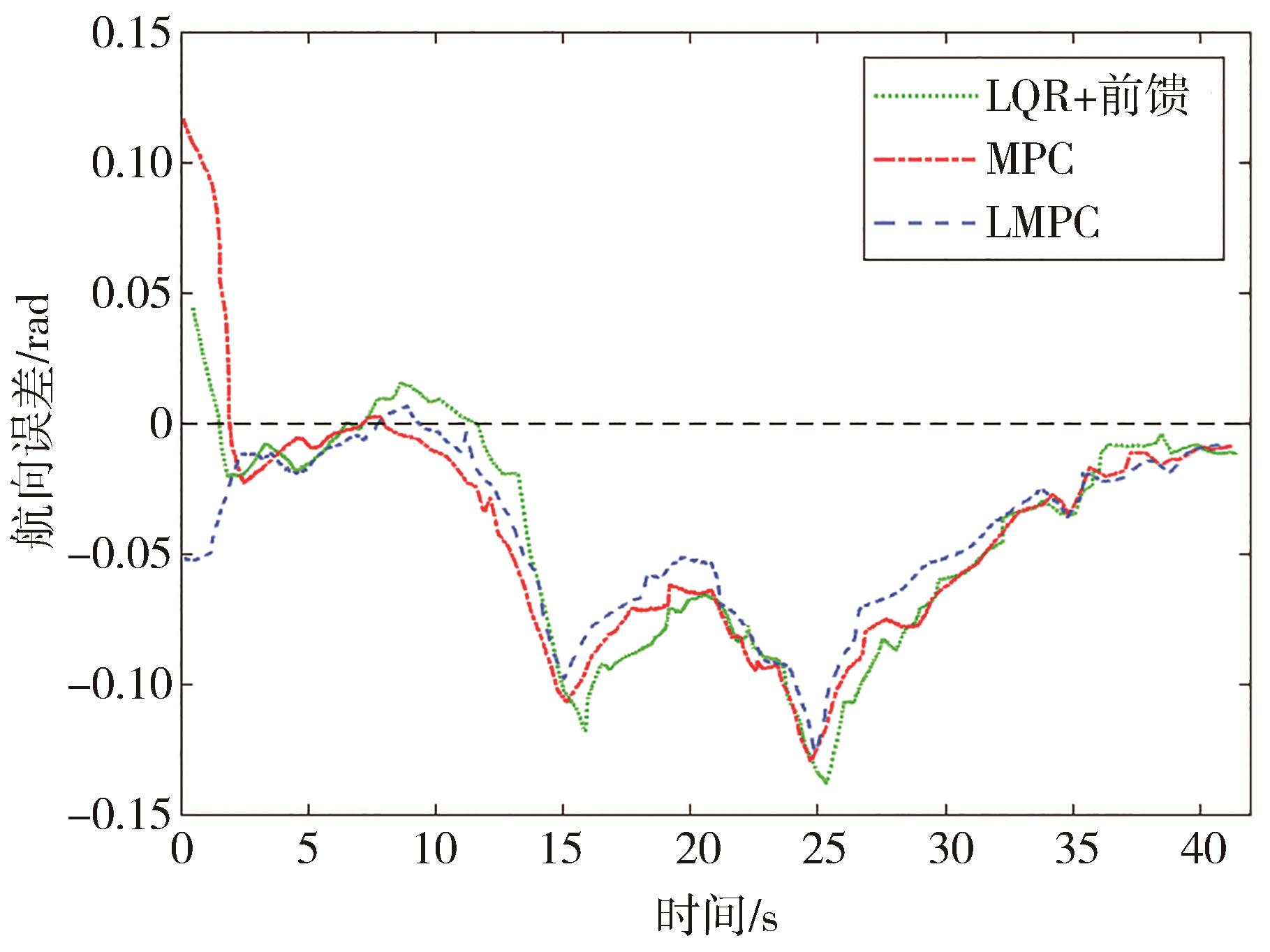
本文为适应物流自动驾驶轻型货车载荷显著变化的特点,满足低计算负载和高稳定性等需求,提出了一种基于LPV-MPC的路径跟踪控制方法。首先构建线性参变模型,并制定该模型与调度变量-速度和载荷的非线性映射规则,旨在提高行车稳定性并降低系统对参数的灵敏度;然后在滚动优化部分,为解决规划层提供的离散轨迹点稠密程度不匹配控制模块预测层需求的问题,设计了一种轨迹重构的方法,构建了适应预测层时域尺度的平滑轨迹序列,能有效降低预测状态与真实状态的偏差;同时采用了多点状态量偏差预测方式代替单点偏差预测,充分利用了参考轨迹信息从而提高跟踪精度;最后通过联合仿真和实车试验,验证了所提出控制策略的有效性。