汽车工程 ›› 2024, Vol. 46 ›› Issue (10): 1816-1828.doi: 10.19562/j.chinasae.qcgc.2024.10.009
张忠1,2,吴晓建1( ),江会华2,张超2,万宇康2
),江会华2,张超2,万宇康2
Zhong Zhang1,2,Xiaojian Wu1(),Huihua Jiang2,Chao Zhang2,Yukang Wan2
摘要:
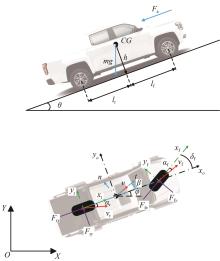
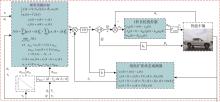
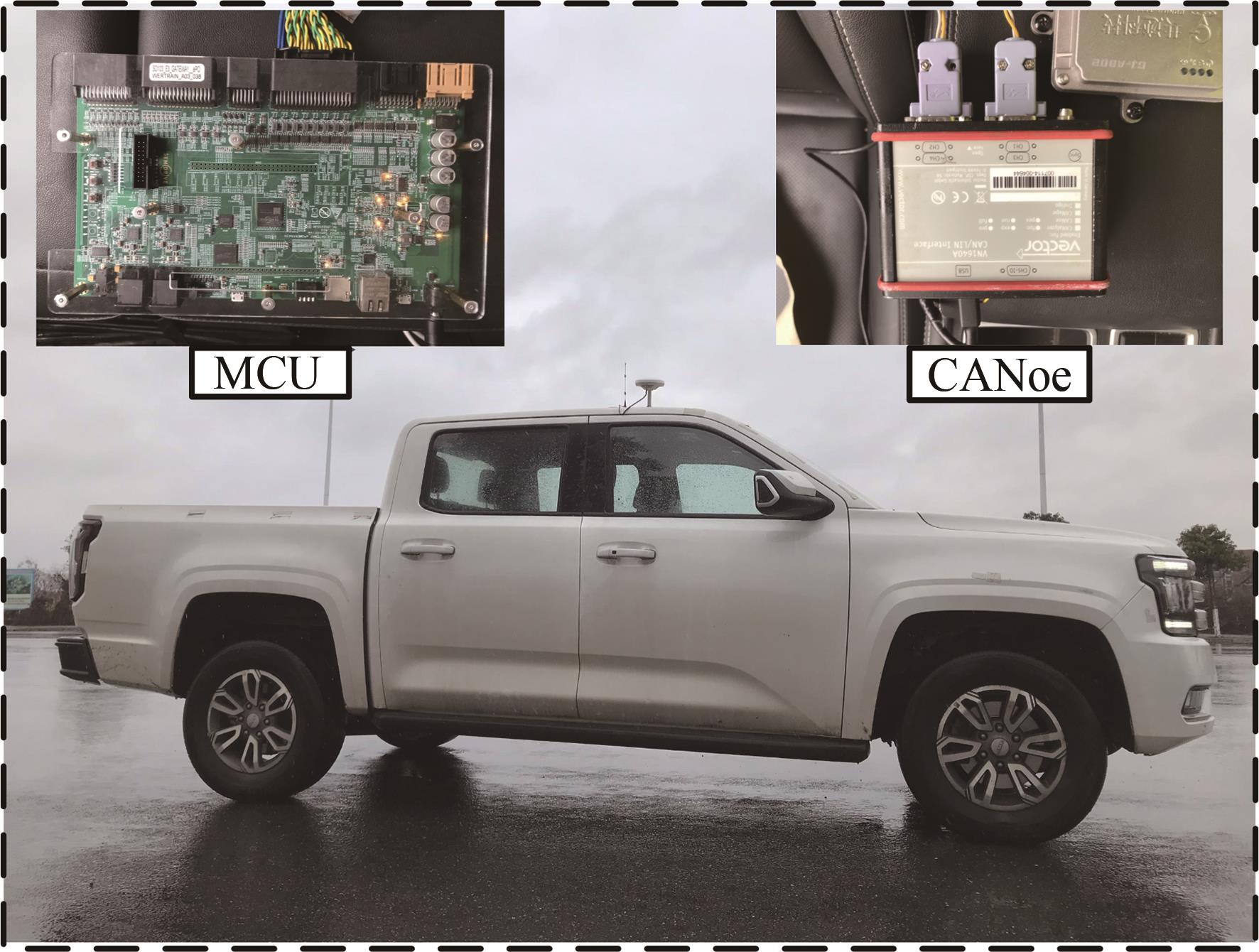
智能车纵向运动控制面临模型失配和外部环境变化等多源干扰,影响速度跟踪的精确性,本文针对性提出一种结合扰动观测和模型预测控制(model predict control, MPC)算法的纵向运动抗干扰控制方法。首先,根据车辆纵向动力学模型分析车辆纵向加速度与各项作用力之间的关系,然后将其简化为含多源干扰的质点运动型并设计模型预测控制器作为上层控制器。其次,针对内部未建模动态干扰及外部随机干扰,设计线性扩张状态观测器(linear extended state observe, LESO)进行实时估计,并通过前馈环节实施补偿,且分析了MPC闭环稳定性和LESO收敛性,最终形成扰动补偿和状态反馈的模型预测最优调节控制律。进一步地,为确保控制策略的高效执行,提出1阶自抗扰控制器作为下层控制器,将期望加速度转换为发动机转矩,从而实现对车速的闭环控制。最后,将算法部署在车载微控制单元(microcontroller unit, MCU)上,在多个速度和道路工况下进行实车测试。实验结果表明,所提出的策略可以快速且精确跟踪目标车速,具备良好的抗干扰能力。