Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (4): 485-491.doi: 10.19562/j.chinasae.qcgc.2021.04.005
Previous Articles Next Articles
Hai Wang1( ),Baixiang Cai1,Yingfeng Cai2,Ze Liu2,Kai Sun3,Long Chen2
),Baixiang Cai1,Yingfeng Cai2,Ze Liu2,Kai Sun3,Long Chen2
Received:2020-09-28
Revised:2021-01-24
Online:2021-04-25
Published:2021-04-23
Contact:
Hai Wang
E-mail:wanghai1019@163.com
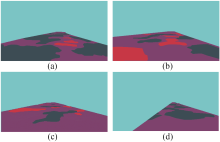
Hai Wang,Baixiang Cai,Yingfeng Cai,Ze Liu,Kai Sun,Long Chen. Detection of Water⁃covered and Wet Areas on Road Pavement Based on Semantic Segmentation Network[J].Automotive Engineering, 2021, 43(4): 485-491.

"

"

"
"

"
| 状态 | 积水区域 | 干燥路面 | 湿滑区域 | 背景 |
|---|---|---|---|---|
| 标签颜色 |  |  |  |  |
"

"
"
"
| 方法 | IoU/% |
|---|---|
| 背景 | 97.22 |
| 路面 | 91.04 |
| 积水区域 | 88.35 |
| 湿滑区域 | 83.67 |
| 平均 | 90.07 |
"
| 方法 | IoU/% |
|---|---|
| 分类神经网络 | 90.7 |
| 支持向量机(SVM) | 87 |
| K?means算法 | 85 |
| 本文方法 | 90.07 |

"

| 1 | 刘凯, 陈慧岩, 龚建伟, 等. 高速无人驾驶车辆的操控稳定性研究[J]. 汽车工程, 2019, 41(5): 514-521. |
| LIU Kai, CHEN Huiyan, GONG Jianwei, et al. A research on handling stability of high⁃speed unmanned vehicles[J]. Automotive Engineering, 2019, 41(5): 514-521. | |
| 2 | 邢智超, 王国业, 何畅然, 等. 汽车双转鼓惯性试验台等效路面附着机理研究[J]. 汽车工程, 2019, 41(4): 455-461. |
| XING Zhichao, WANG Guoye, HE Changran, et al. A study on equivalent pavement adhesion mechanism of vehicle's inertial test bench with dual⁃drum[J]. Automotive Engineering, 2019, 41(4): 455-461. | |
| 3 | KUNO T, SUGIURA H. Detection of road conditions with CCD cameras mounted on a vehicle[J]. Systems and Computers in Japan, 1999, 30(14): 88-99. |
| 4 | YANG H J, JANG H, JEONG D S. Detection algorithm for road surface condition using wavelet packet transform and SVM[C].The 19th Korea⁃Japan Joint Workshop on Frontiers of Computer Vision. IEEE, 2013: 323-326. |
| 5 | JONSSON P, CASSELGREN J, THÖRNBERG B. Road surface status classification using spectral analysis of NIR camera images[J]. IEEE Sensors Journal, 2014, 15(3): 1641-1656. |
| 6 | KRIZHEVSKY A, SUTSKEVER I, HINTON G E. Imagenet classification with deep convolutional neural networks[C].Advances in Neural Information Processing Systems, 2012: 1097-1105. |
| 7 | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the kitti vision benchmark suite[C].2012 IEEE Conference on Computer Vision and Pattern Recognition. IEEE, 2012: 3354-3361. |
| 8 | NOLTE M, KISTER N, MAURER M. Assessment of deep convolutional neural networks for road surface classification[C].2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018: 381-386. |
| 9 | PAN G, FU L, YU R, et al. Winter road surface condition recognition using a pre⁃trained deep convolutional neural network[R]. 2018. |
| 10 | LONG J, SHELHAMER E, DARRELL T. Fully convolutional networks for semantic segmentation[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2015: 3431-3440. |
| 11 | RONNEBERGER O, FISCHER P, BROX T. U⁃net: convolutional networks for biomedical image segmentation[C].International Conference on Medical Image Computing and Computer⁃assisted Intervention. Springer, Cham, 2015: 234-241. |
| 12 | ZHOU Z, SIDDIQUEE M M R, TAJBAKHSH N, et al. Unet++: a nested u⁃net architecture for medical image segmentation[M].Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support. Springer, Cham, 2018: 3-11. |
| 13 | ZHAO H, SHI J, QI X, et al. Pyramid scene parsing network[C].Proceedings of the IEEE Conference on Computer Vision and Pattern recognition, 2017: 2881-2890. |
| 14 | CHEN L C, PAPANDREOU G, KOKKINOS I, et al. Deeplab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 40(4): 834-848. |
| 15 | CHEN L C, PAPANDREOU G, SCHROFF F, et al. Rethinking atrous convolution for semantic image segmentation[J]. arXiv Preprint arXiv:, 2017. |
| 16 | CHEN L C, ZHU Y, PAPANDREOU G, et al. Encoder⁃decoder with atrous separable convolution for semantic image segmentation[C].Proceedings of the European Conference on Ccomputer Vision (ECCV), 2018: 801-818. |
| 17 | YU F, KOLTUN V. Multi⁃scale context aggregation by dilated convolutions[J]. arXiv Preprint arXiv:, 2015. |
| 18 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778. |
| 19 | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large⁃scale image recognition[J]. arXiv Preprint arXiv:1409.1556, 2014.17 |
| 20 | CORDTS M, OMRAN M, RAMOS S, et al.The cityscapes dataset for semantic urban scene understanding[J]. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016. |
| 21 | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C].Proceedings of the IEEE International Conference on Computer Vision, 2017: 2980-2988. |
| [1] | Ze Gao, Zunkang Chu, Jiasheng Shi, Fu Lin, Weixiong Rao, Haiyan Yu. Research on Fast Prediction Method of Stress Field of Automotive Parts Based on Graph Network [J]. Automotive Engineering, 2024, 46(1): 170-178. |
| [2] | Weiguo Liu,Zhiyu Xiang,Rui Liu,Guodong Li,Zixu Wang. Research on End-to-End Vehicle Motion Planning Method Based on Deep Learning [J]. Automotive Engineering, 2023, 45(8): 1343-1352. |
| [3] | Jiahao Zhao,Zhiquan Qi,Zhifeng Qi,Hao Wang,Lei He. Calculation of Heading Angle of Parallel Large Vehicle Based on Tire Feature Points [J]. Automotive Engineering, 2023, 45(6): 1031-1039. |
| [4] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [5] | Fengchong Lan,Jikai Chen,Jiqing Chen,Xinping Jiang,Zihan Li,Wei Pan. Research on Lithium Battery Remaining Useful Life Prediction Method Driven by Real Vehicle Data [J]. Automotive Engineering, 2023, 45(2): 175-182. |
| [6] | Linhui Li,Xinliang Zhang,Yifan Fu,Jing Lian,Jiaxu Ma. Research on Visible Light and Infrared Post-Fusion Detection Based on TC-YOLOv7 Algorithm [J]. Automotive Engineering, 2023, 45(12): 2280-2290. |
| [7] | Xiaojun Zhang,Jingzhe Xi,Yanlei Shi,Anlu Yuan. Lightweight YOLOv7-R Algorithm for Road-Side View Target Detection [J]. Automotive Engineering, 2023, 45(10): 1833-1844. |
| [8] | Jie Hu,Yuanjie Li,Hao Geng,Huangzheng Geng,Xiong Guo,Hongwei Yi. Construction of Vehicle Fault Knowledge Graph Based on Deep Learning [J]. Automotive Engineering, 2023, 45(1): 52-60. |
| [9] | Jie Hu,Boyuan Xu,Zongquan Xiong,Minjie Chang,Di Guo,Lihao Xie. Cross-Domain Object Detection Algorithm Based on Multi-scale Mask Classification Domain Adaptive Network [J]. Automotive Engineering, 2022, 44(9): 1327-1338. |
| [10] | Guihong Bi,Xu Xie,Zilong Cai,Zhao Luo,Chenpeng Chen,Xin Zhao. Capacity Estimation of Lithium-ion Battery Based on Deep Learning Under Dynamic Conditions [J]. Automotive Engineering, 2022, 44(6): 868-878. |
| [11] | Dafang Wang,Jingdong Du,Jiang Cao,Mei Zhang,Gang Zhao. Research on Style Transfer Network for Autonomous Driving Data Generation [J]. Automotive Engineering, 2022, 44(5): 684-690. |
| [12] | Jinghua Guo,Zhifei He,Yugong Luo,Keqiang Li. Vehicle Cut-in Trajectory Prediction Based on Deep Learning in a Human-machine Mixed Driving Environment [J]. Automotive Engineering, 2022, 44(2): 153-160. |
| [13] | Yuande Jiang,Bing Zhu,Xiangmo Zhao,Jian Zhao,Bingbing Zheng. Modeling of Traffic Vehicle Interaction for Autonomous Vehicle Testing [J]. Automotive Engineering, 2022, 44(12): 1825-1833. |
| [14] | Zhenhai Gao,Wenhao Wen,Minghong Tang,Jian Zhang,Guoying Chen. Estimation of Vehicle Motion State Based on Hybrid Neural Network [J]. Automotive Engineering, 2022, 44(10): 1527-1536. |
| [15] | Shaowei Zhang,Dawei Zhu,Guangzhao Zhai. Prediction on Seat’s Anti-whiplash-injury Performance Based on Deep Learning [J]. Automotive Engineering, 2022, 44(10): 1600-1608. |