Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (7): 1235-1243.doi: 10.19562/j.chinasae.qcgc.2023.07.014
Special Issue: 新能源汽车技术-电驱动&能量管理2023年
Previous Articles Next Articles
Zhenfeng Pu1,Liang Tang1( ),Wenbin Shangguan2,Weiwei Wang3,Kaihong Jiang3
),Wenbin Shangguan2,Weiwei Wang3,Kaihong Jiang3
Received:2022-12-15
Revised:2023-01-27
Online:2023-07-25
Published:2023-07-25
Contact:
Liang Tang
E-mail:happyliang@bjfu.edu.cn
Zhenfeng Pu, Liang Tang, Wenbin Shangguan, Weiwei Wang, Kaihong Jiang. Research on the Estimation of Vehicle Speed Under Low-Speed Conditions Based on Multi-sensor Information[J].Automotive Engineering, 2023, 45(7): 1235-1243.
"

"
"
| 内容 | 符号 | 数值 | 单位 |
|---|---|---|---|
| 轴距 | l | 3.11 | m |
| 质心至前轴距离 | la | 1.586 1 | m |
| 质心至后轴距离 | lb | 1.523 9 | m |
| 轮距 | S | 1.69 | m |
| 转向传动比 | K | 16.26 | |
| 车轮滚动半径 | R0 | 0.374 26 | m |
| 前轴主减速器减速比 | 10.136 | ||
| 后轴主减速器减速比 | 9.599 |
"
"
"

"
"

"
"
| 测试场景 | ESP | 模型I | 模型II | 本文算法 |
|---|---|---|---|---|
| 平坦路面直行 | 0.114 5 | 0.100 1 | 0.094 3 | 0.084 8 |
| 平坦路面转弯 | 0.084 9 | 0.084 0 | 0.079 7 | 0.069 8 |
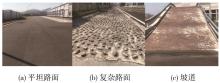
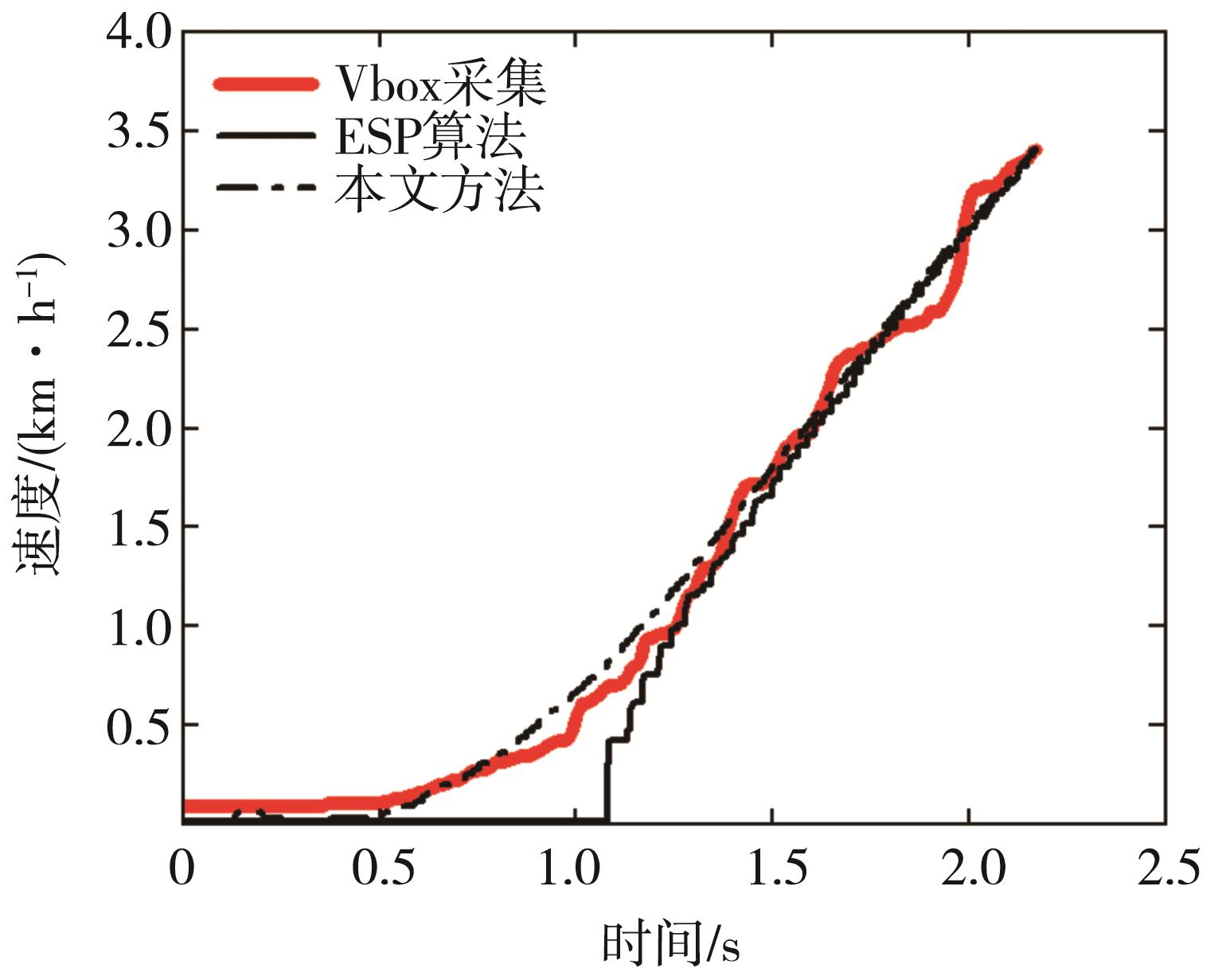
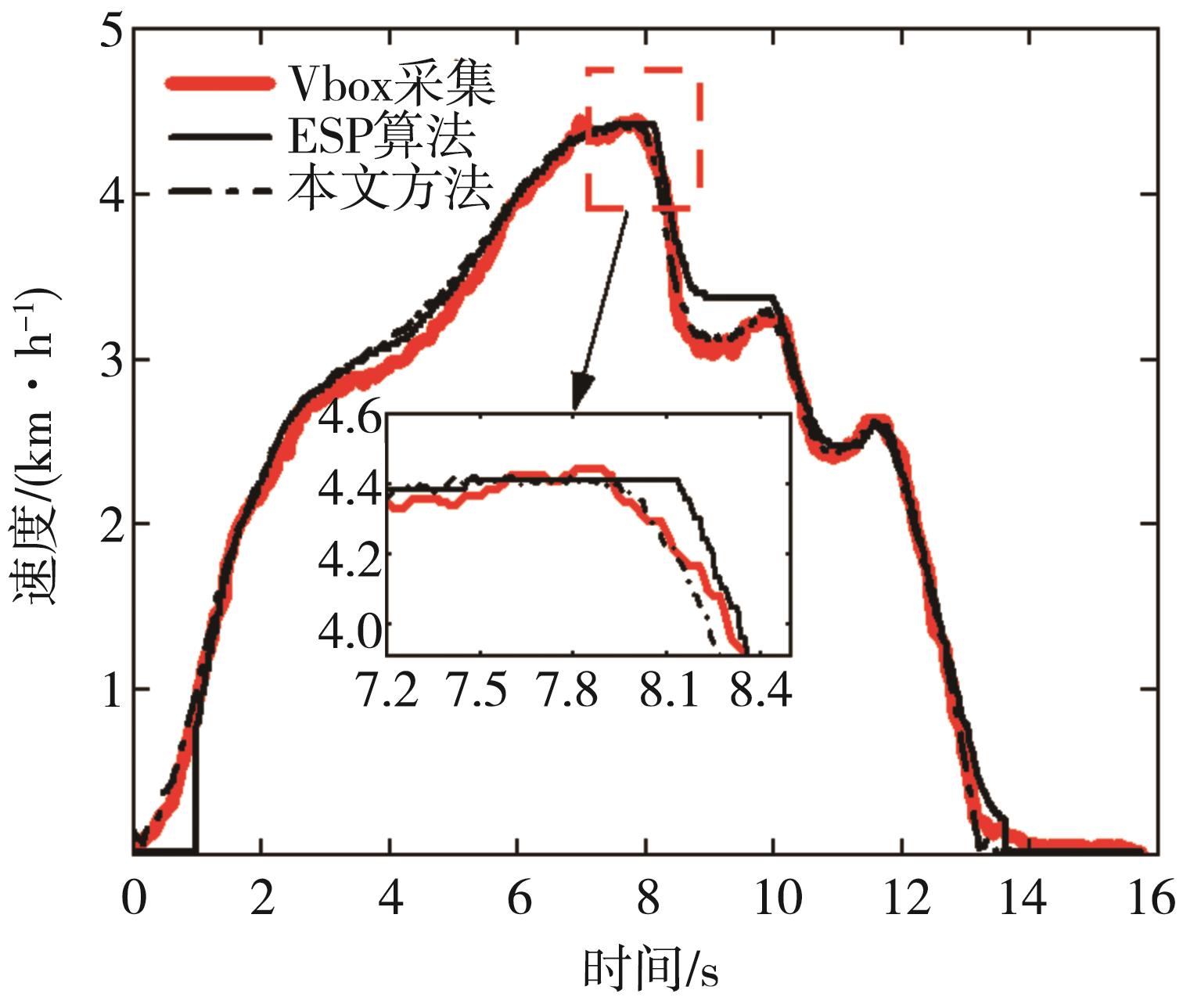
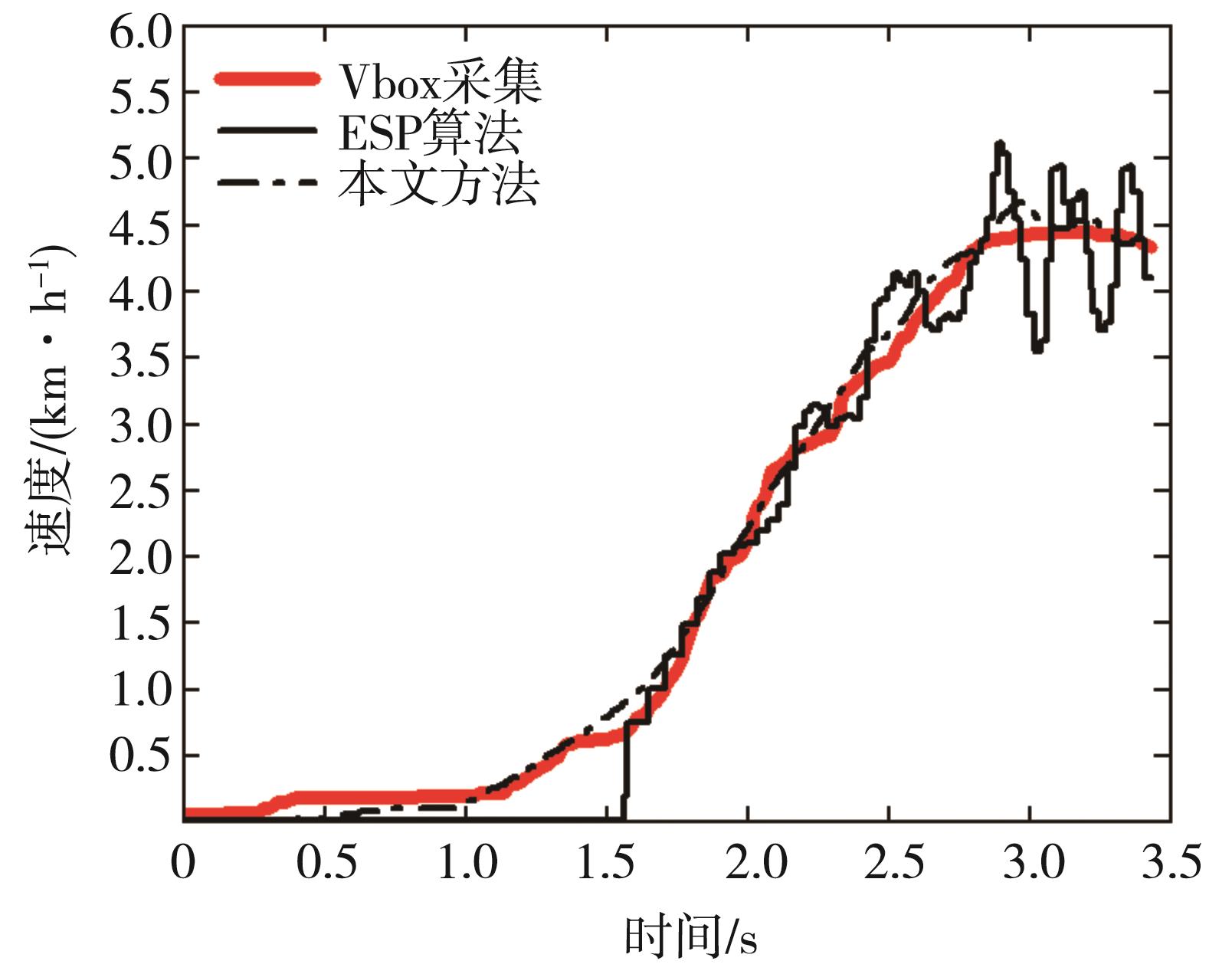
| 复杂路面直行 | 0.197 5 | 0.150 3 | 0.139 4 | 0.020 7 |
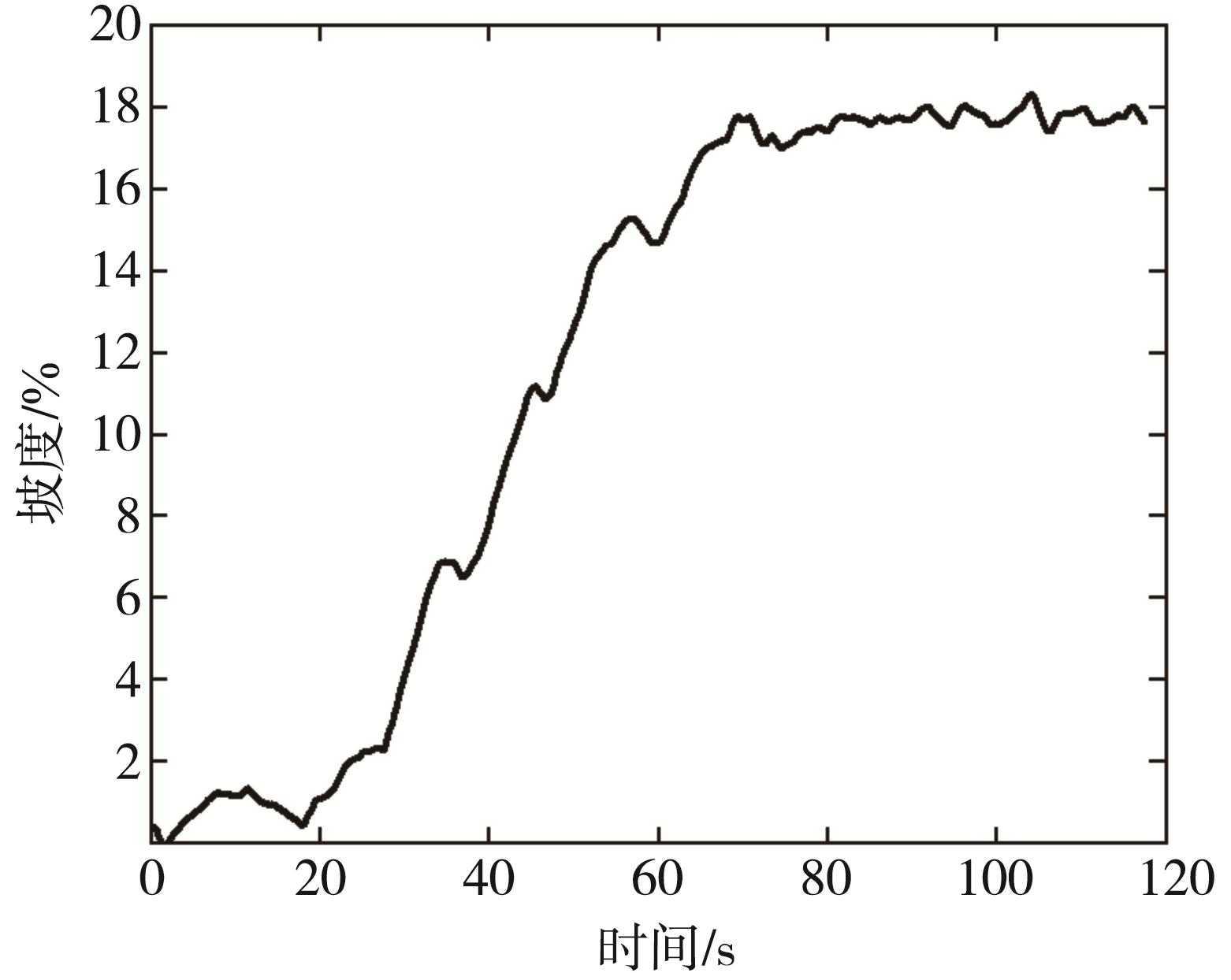
| 坡道直行 | 0.048 2 | 0.047 5 | 0.048 7 | 0.038 4 |
| 1 | SABET M T, DANIALI H R M, FATHI A R, et al. Experimental analysis of a low-cost dead reckoning navigation system for a land vehicle using a robust AHRS[J]. Robotics and Autonomous Systems, 2017, 95: 37-51. |
| 2 | LIU H, LUO S, LU J. Method for adaptive robust four-wheel localization and application in automatic parking systems[J]. IEEE Sensors Journal, 2019, 19(22): 10644-10653. |
| 3 | SCHOLTE W J, MARCO V R, NIJMEIJER H. Experimental validation of vehicle velocity, attitude and IMU bias estimation[J]. IFAC-PapersOnLine, 2019, 52(8): 118-123. |
| 4 | 王震坡, 丁晓林, 张雷. 四轮轮毂电机驱动电动汽车驱动防滑控制关键技术综述[J]. 机械工程学报, 2019, 55(12): 99-120. |
| WANG Z P, DING X L, ZHANG L. Overview on key technologies of acceleration slip regulation for four-wheel-independently-actuated electric vehicles[J]. Journal of Mechanical Engineering, 2019, 55(12): 99-120. | |
| 5 | DING X, WANG Z, ZHANG L, et al. Longitudinal vehicle speed estimation for four-wheel-independently-actuated electric vehicles based on multi-sensor fusion[J]. IEEE Transactions on Vehicular Technology, 2020, 69(11): 12797-12806. |
| 6 | 郭洪艳, 陈虹, 赵海艳, 等. 汽车行驶状态参数估计研究进展与展望[J]. 控制理论与应用, 2013, 30(6): 661-672. |
| GUO H Y, CHEN H, ZHAO H Y, et al. State and parameter estimation for running vehicle: recent developments and perspective[J]. Control Theory & Applications, 2013, 30(6): 661-672. | |
| 7 | RALLO G, FORMENTIN S, SAVARESI S M. On-line model-based wheel speed filtering for geometrical error compensation[J]. Mechatronics, 2018, 50: 189-195. |
| 8 | 韩宗奇, 王立强, 王瑞林, 等. 汽车高速行驶时轮速信号时频域变换处理方法[J]. 机械工程学报, 2014, 50(16): 155-161. |
| HAN Z Q, WANG L Q, WANG R L, et al. FFT / IFFT method for wheel speed sensor signal processing when car runs at high speed[J]. Journal of Mechanical Engineering, 2014, 50(16): 155-161. | |
| 9 | 陈浩, 袁良信, 孙涛, 等. 电动轮汽车车速与道路坡度估计[J]. 汽车工程, 2020, 42(2): 199-205,256. |
| CHEN H, YUAN L X, SUN T, et al. Estimation of in-wheel motor driven electric vehicle speed and road gradient[J]. Automotive Engineering, 2020, 42(2): 199-205,256. | |
| 10 | KARLSSON R, HENDEBY G. Speed estimation from vibrations using a deep learning cnn approach[J]. IEEE Sensors Letters, 2021, 5(3): 1-4. |
| 11 | 高振海, 温文昊, 唐明弘, 等. 基于混合神经网络的汽车运动状态估计[J]. 汽车工程, 2022, 44(10): 1527-1536. |
| GAO Z H, WEN W H, TANG M H, et al. Estimation of vehicle motion state based on hybrid neural network[J]. Automotive Engineering, 2022, 44(10): 1527-1536. | |
| 12 | HASHEMI E, KASAIEZADEH A, KHOSRAVANI S, et al. Estimation of longitudinal speed robust to road conditions for ground vehicles[J]. Vehicle System Dynamics, 2016, 54(8): 1120-1146. |
| 13 | ZHAO Z, CHEN H, YANG J, et al. Estimation of the vehicle speed in the driving mode for a hybrid electric car based on an unscented Kalman filter[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of automobile engineering, 2015, 229(4): 437-456. |
| 14 | 芦冰, 解小华, 蔡可天, 等. UKF车速估计器的算法研究与仿真[J]. 吉林大学学报(信息科学版), 2015, 33(1): 7-11. |
| LU B, XIE X H, CAI K, et al. Speed estimation research and simulation based on UKF algorithm[J]. Journal of Jilin University (Information Science Edition), 2015, 33(1): 7-11. | |
| 15 | 任彦君, 殷国栋, 沙文瀚, 等. 基于运动学信息融合的四轮驱动汽车纵向车速自适应估计方法[J]. 机械工程学报, 2021, 57(8): 184-194. |
| REN Y J, YIN G D, SHA W H, et al. Longitudinal velocity adaptive estimation for four-wheel-drive vehicles via kinematic Information fusion[J]. Journal of Mechanical Engineering, 2021, 57(8): 184-194. | |
| 16 | 周卫琪, 齐翔. 基于多传感器信息融合的汽车行驶状态估计[J]. 汽车工程, 2019, 41(1): 7-13,20. |
| ZHOU W Q, QI X. State estimation of vehicle based on multi-sensors information fusion[J]. Automotive Engineering, 2019, 41(1): 7-13,20. | |
| 17 | 周卫琪, 齐翔, 陈龙, 等. 基于无迹卡尔曼滤波与遗传算法相结合的车辆状态估计[J]. 汽车工程, 2019, 41(2): 198-205. |
| ZHOU W Q, QI X, CHEN L, et al. Vehicle state estimation based on the combination of unscented Kalman filtering and genetic algorithm[J]. Automotive Engineering, 2019, 41(2): 198-205. | |
| 18 | 高博麟, 陈慧, 谢书港, 等. 分布式电驱动车车速及路面附着系数融合估计[J]. 汽车工程, 2016, 38(2): 216-220. |
| GAO B L, CHEN H, XIE S G, et al. Velocity and road friction coefficient fusion estimation of distributed electric drive vehicle[J]. Automotive Engineering, 2016, 38(2): 216-220. | |
| 19 | 赵治国, 朱强, 周良杰, 等. 分布式驱动HEV自适应无迹卡尔曼车速估计[J]. 中国科学:技术科学, 2016, 46(5): 481-492. |
| ZHAO Z G, ZHU Q, ZHOU L J, et al. Vehicle speed estimation in driving case based on distributed self-adaptive unscented Kalman filter for 4WD hybrid electric car[J]. Sci Sin Tech, 2016, 46(5): 481-492. | |
| 20 | 余卓平, 夏新, 熊璐, 等. 分布式驱动电动汽车纵向车速非线性自适应估计[J]. 同济大学学报(自然科学版), 2016, 44(5): 779-786. |
| YU Z P, XIA X, XIONG L, et al. Vehicle longitudinal velocity nonlinear adaptive estimation of distributed drive electric vehicle[J]. Journal of Tongji University (Natural Science), 2016, 44(5): 779-786. | |
| 21 | DEL PINO I, MUNOZ-BANÓN M A, CONTRERAS M A, et al. Speed estimation for control of an unmanned ground vehicle using extremely low resolution sensors[C]. ICINCO (1). 2018: 216-223. |
| 22 | PING X, CHENG S, YUE W, et al. Adaptive estimations of tyre-road friction coefficient and body’s sideslip angle based on strong tracking and interactive multiple model theories[J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2020, 234(14): 3224-3238. |
| 23 | LI L, SONG J, KONG L, et al. Vehicle velocity estimation for real-time dynamic stability control[J]. International Journal of Automotive Technology, 2009, 10(6): 675-685. |
| [1] | Nianzhong Zhang,Qiang Song,Guanfeng Wang,Mingsheng Wang. Research on Non-Current-Sensor Control of Permanent Magnet Synchronous Motor for Vehicle [J]. Automotive Engineering, 2024, 46(2): 281-289. |
| [2] | Bin Deng, Weihan Li, Di Wu, Bingzhan Zhang, Han Zhao. Integral Sliding Mode Control for Four-Wheel Active Steering Based on Kalman Filter Extended State Observer [J]. Automotive Engineering, 2024, 46(1): 100-108. |
| [3] | Yongtao Li,Chenxu Sun,Weiguang Zheng,Enyong Xu,Yufang Li,Shanchao Wang. Collision Warning Based on Fusion of Millimeter Wave Radar and Vision [J]. Automotive Engineering, 2023, 45(9): 1666-1676. |
| [4] | Minghui Hu,Guangyao Zhu,Changhe Liu,Guofeng Tang. Joint Estimation of State of Charge for Lithium-Ion Battery with Kalman Filtering and Gated Recurrent Unit Neural Networks Considering Hysteresis Characteristics [J]. Automotive Engineering, 2023, 45(9): 1688-1701. |
| [5] | Xiao Wu, Wenku Shi, Zhiyong Chen. Active Suspension Control Based on Interacting Multiple Model Kalman Filter [J]. Automotive Engineering, 2023, 45(7): 1200-1211. |
| [6] | Xiaoqiang Sun, Yulin Wang, Weiwei Hu, Yingfeng Cai, Long Chen, Wong Pak Kin. Research on Estimation Strategy of Vehicle Driving State Based on Tire Piecewise Affine Identification Model [J]. Automotive Engineering, 2023, 45(7): 1212-1221. |
| [7] | Jianhua Chen,Zhongming Xu,Zhifei Zhang. Suspension State Estimation Based on Wheelbase Preview at Variable Speed [J]. Automotive Engineering, 2023, 45(6): 1040-1049. |
| [8] | Chun Wang,Tao Tang,Yongzhi Zhang. A Supercapacitor SOC Estimation Method Based on Weighted Fusion Considering Ambient Temperature Variation [J]. Automotive Engineering, 2023, 45(4): 627-636. |
| [9] | Xinrong Zhang,Xin Wang,Xinle Gong,Jin Huang,Dan Huang,Pengxing Wang. Segmented Identification Method of Tire-Road Friction Coefficient for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(10): 1923-1932. |
| [10] | Shuxuan Sheng,Chongbo Jing,Chaoyang Jiang. Vision and Single RSU Assisted Vehicle Positioning Method [J]. Automotive Engineering, 2022, 44(7): 1009-1017. |
| [11] | Zewu Deng,Zhaozheng Hu,Zhe Zhou, LiuYulin,Chao Peng. Intelligent Vehicle Positioning by Fusing LiDAR and Double-layer Map Model [J]. Automotive Engineering, 2022, 44(7): 1018-1026. |
| [12] | Ping Wang,Qingrui Gong,Ze Cheng,Ji’ang Zhang. An AUKF-Based SOC Estimation Method for Lithium-ion Battery [J]. Automotive Engineering, 2022, 44(7): 1080-1088. |
| [13] | Jingwei Zhang,Tiejun Liu,Rengang Li,Dan Liu,Jinglin Zhan,Hongwei Kan. A Temporal Calibration Method for Multi-Sensor Fusion of Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(2): 215-224. |
| [14] | Lang Liu,Zhifei Zhang,Hongwei Lu,Zhongming Xu. Road Roughness Identification Based on Augmented Kalman Filtering with Consideration of Vehicle Acceleration [J]. Automotive Engineering, 2022, 44(2): 247-255. |
| [15] | Qiu Xia,Te Chen,Long Chen,Xing Xu,Yingfeng Cai. Vehicle Sideslip Angle Estimation Method Based on Redundant Information Fusion [J]. Automotive Engineering, 2022, 44(2): 280-289. |
|