Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (12): 2387-2396.doi: 10.19562/j.chinasae.qcgc.2025.12.011
Previous Articles Next Articles
Yong Han1,2( ),Sihang Xie1,2,Shuiwen Shen1,2,Zhenyu Qin1,2,Di Pan1,2,Zhiqun Yuan1,2
),Sihang Xie1,2,Shuiwen Shen1,2,Zhenyu Qin1,2,Di Pan1,2,Zhiqun Yuan1,2
Received:2025-03-11
Revised:2025-05-06
Online:2025-12-25
Published:2025-12-19
Contact:
Yong Han
E-mail:yonghan@xmut.edu.cn
Yong Han,Sihang Xie,Shuiwen Shen,Zhenyu Qin,Di Pan,Zhiqun Yuan. Yaw Stability Control of Vehicles Under Extreme Working Conditions[J].Automotive Engineering, 2025, 47(12): 2387-2396.
"
"
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 1.406 | -0.381 96 | ||
| -47.424 3 | 0.002 289 | ||
| 1 528.122 | 0.013 442 | ||
| 3 260.4 | 0.003 709 | ||
| 15.726 6 | 19.165 6 | ||
| 0.005 01 | 12.135 6 | ||
| -0.004 92 | 6.262 06 |
"
"

"
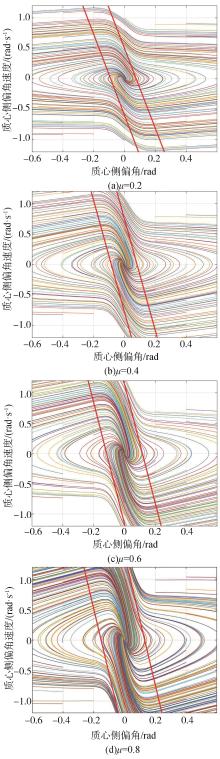
| 附着系数 | 斜率 绝对值 | 截距 绝对值 | 相对斜率 绝对值 | 相对截距 绝对值 |
|---|---|---|---|---|
| 0.2 | 6.5 | 0.48 | 0.630 | 0.350 |
| 0.4 | 9.85 | 0.705 | 0.956 | 0.515 |
| 0.6 | 10.24 | 1.156 | 0.994 | 0.843 |
| 0.8 | 10.3 | 1.37 | 1 | 1 |
"

"
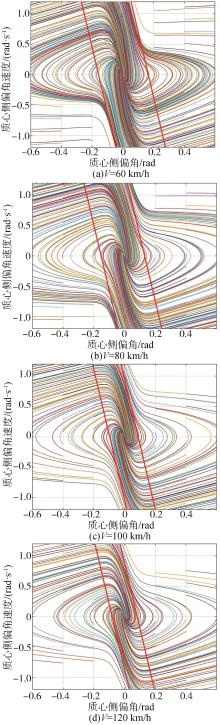
| 车速/( | 斜率绝对值 | 截距绝对值 |
|---|---|---|
| 60 | 10.486 | 1.47 |
| 80 | 10.3 | 1.37 |
| 100 | 10.15 | 0.806 |
| 120 | 10.08 | 0.719 |
"

"
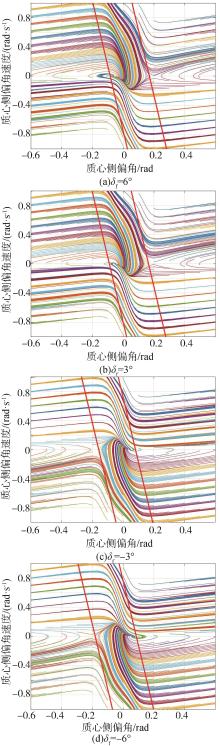
| 前轮转角 | 相对偏移量 | 移动方向 |
|---|---|---|
| 6° | 0.062 6 | 右 |
| 3° | 0.025 2 | 右 |
| 0° | 0 | 无 |
| -3° | -0.026 9 | 左 |
| -6° | -0.052 2 | 左 |
"
"
| 参数 | 符号 | 数值 |
|---|---|---|
| 质心到前轴距离 | 1.015 | |
| 质心到后轴距离 | 1.895 | |
| 整车质量 | 1 270 | |
| 横摆转动惯量 | 1 536.7 | |
| 前轮侧偏刚度 | -112 600 | |
| 后轮侧偏刚度 | -135 000 |
"
"

"
"
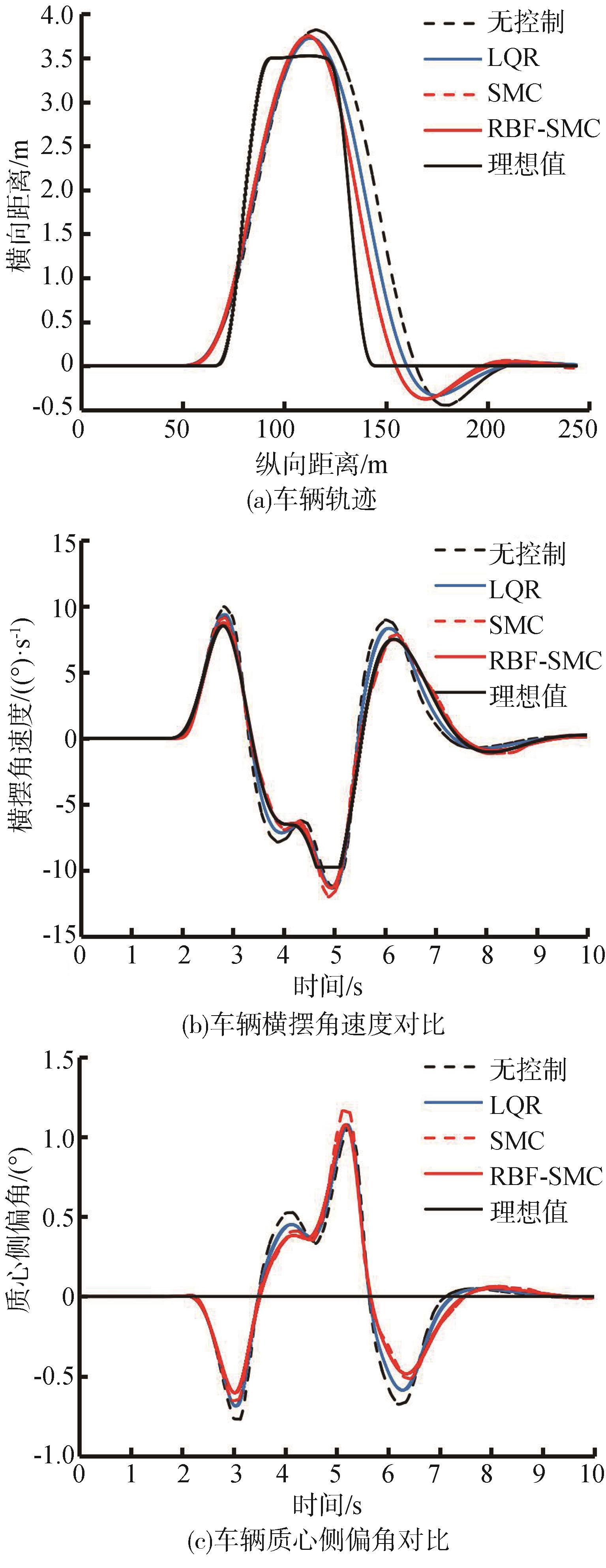
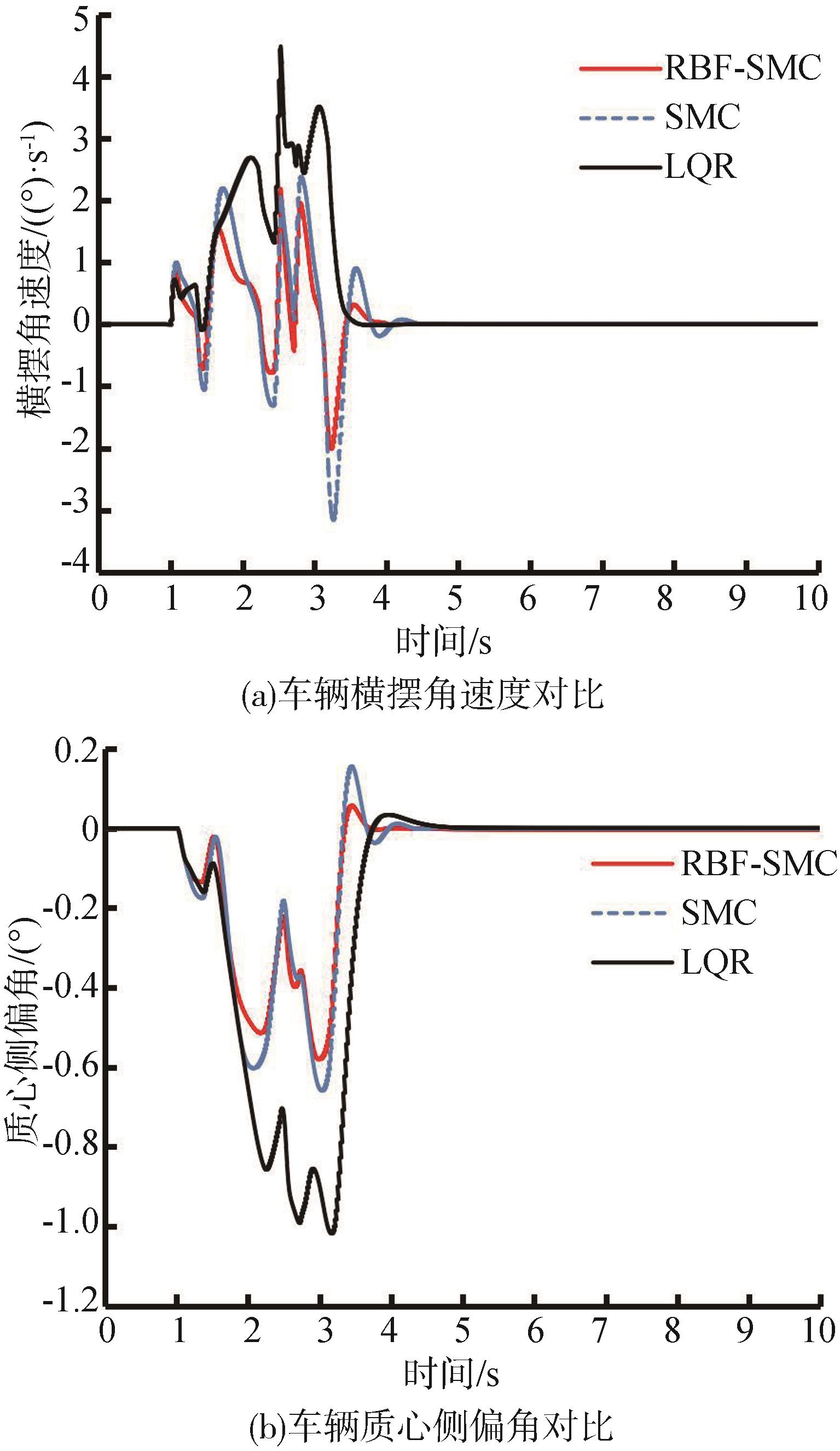
| 控制器 | 横摆角速度峰值/((°)·s-1) | 质心侧偏角峰值/(°) | 恢复时间/s |
|---|---|---|---|
| LQR | 1.03 | 4.81 | |
| SMC | 0.65 | 4.28 | |
| RBF-SMC | 0.58 | 3.65 |

"
| [1] | National Highway Traffic Safety Administration. (n.d.). NHTSA crash viewer [DB/OL]. 2018-2022. https://cdan.dot.gov/query. |
| [2] | LI S,WANG X,CUI G,et al. Yaw and lateral stability control based on predicted trend of stable state of the vehicle[J].Vehicle System Dynamics: International Journal of Vehicle Mechanics and Mobility, 2023. |
| [3] | CHEN G, ZHAO X, GAO Z, et al.Dynamic drifting control for general path tracking of autonomous vehicles[J].IEEE Transactions on Intelligent Vehicles,2023,8(3):2527-2537. |
| [4] | LIU J, GAO L, ZHANG J,et al. Super-twisting algorithm second-order sliding mode control for collision avoidance system based on active front steering and direct yaw moment control[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021. |
| [5] | 周兵,刘阳毅,吴晓建,等. 主动前轮转向和直接横摆力矩集成控制[J]. 浙江大学学报(工学版),2022,56(12):2330-2339. |
| ZHOU Bing, LIU Yangyi, WU Xiaojian,et al. Integrated control of active front steering and direct yaw moment[J]. Journal of Zhejiang University (Engineering Science) ,2022,56(12):2330-2339. | |
| [6] | ZHANG J, WANG H, MA M, et al. Active front steering-based electronic stability control for steer-by-wire vehicles via terminal sliding mode and extreme learning machine[J]. IEEE Transactions on Vehicular Technology,2020. |
| [7] | BELLEGARDA G, NGUYEN Q. Dynamic vehicle drifting with nonlinear MPC and a fused kinematic-dynamic bicycle model[J]. IEEE Control Systems Letters, 2021, 6: 1958-1963. |
| [8] | BAARS M, HELLENDOORN H, ALIREZAEI M. Control of a scaled vehicle in and beyond stable limit handling[J]. IEEE Transactions on Vehicular Technology, 2021, 70(7): 6427-6437. |
| [9] | MUHAMMAD E, VALI A R, KASHANINIA A, et al. Coordination of active front steering and direct yaw control systems using MIMO sliding mode control[J]. International Journal of Control, Automation and Systems,2024,22(1):1-15. |
| [10] | 丛森森, 高峰, 许述财,等. 基于动态稳定域的车辆横纵向稳定性协同控制[J]. 汽车工程, 2022,44(6):900-908. |
| CONG Sensen, GAO Feng, XU Shucai, et al. Cooperative control of vehicle lateral and longitudinal stability based on dynamic stability region[J]. Automotive Engineering, 2022,44(6):900-908. | |
| [11] | 李宇昊.分布式驱动电动汽车横摆稳定性控制策略研究[D].南京:南京航空航天大学,2022. |
| LI Yuhao. Research on yaw stability control strategy of distributed drive electric vehicle[D]. Nanjing: Nanjing University of Aeronautics and Astronautics,2022. | |
| [12] | LI S, TIAN Y,YUE X,et al. Spatial-based predictive control for vehicle collision avoidance by steering maneuvers[J].International Journal of Automotive Technology, 2022, 23(1):41-53. |
| [13] | YIM S, KIM S, YUN H. Coordinated control with electronic stability control and active front steering using the optimum yaw moment distribution under a lateral force constraint on the active front steering[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2016, 230(5): 581-592. |
| [14] | ZHANG B, ZHAO W, LUAN Z,et al. An antirollover control strategy based on time-varying nonlinear MPC for three-axle steering/braking-by-wire vehicle[J]. IEEE Transactions on Industrial Electronics, 2024, 71(9): 11048-11060. |
| [15] | 李绍松,郭孔辉,仇韬,等. 极限工况下主动前轮转向汽车稳定性控制[J]. 汽车工程,2020, 42(2): 191-198. |
| LI Shaosong,GUO Konghui, QIU Tao,et al. Stability control of vehicle with active front steering under extreme conditions [J]. Automotive Engineering,2020, 42(2): 191-198. | |
| [16] | 刘金琨. 智能控制:理论基础、算法设计与应用[M]. 2版.北京:清华大学出版社,2019. |
| LIU J. Intelligent control: theoretical foundations, algorithm design, and applications [M]. 2nd ed.Beijing:Tsinghua University Press,2019. | |
| [17] | 罗玉涛 郭海文. 线控转向系统的自适应神经网络滑模控制[J]. 华南理工大学学报(自然科学版), 2021, 49(1): 65-73. |
| LUO Yutao, GUO Haiwen. Adaptive neural network sliding mode control for steer-by-wire system[J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(1): 65-73. | |
| [18] | 刘伟,丁海涛,郭孔辉,等. 质心侧偏角相图在车辆ESC系统稳定性控制的应用[J]. 北京理工大学学报(自然科学版),2013, 33(1): 42-46. |
| LIU Wei, DING Haitao, GUO Konghui, et al. Application of centroid declination phase diagram in stability control of vehicle ESC system[J].Transactions of Beling Institute of Technology (Natural Science Edition), 2013, 33(1): 42-46. | |
| [19] | 魏玉博.基于相平面域的车辆稳定性控制及转矩分配优化研究[D]. 长春:吉林大学,2023. |
| WEI Yubo. Research on vehicle stability control and optimization of torque distribution based on phase plane domain[D].Changchun: Jilin University,2023. | |
| [20] | 许家孟.车辆稳定性随机过程相平面分析与控制[D]. 长春:吉林大学,2022. |
| XU Jiameng. Phase plane analysis and control of stochastic processes for vehicle stability[D].Changchun: Jilin University,2023. | |
| [21] | 钟龙飞,彭育辉,江铭. 基于相平面的分布式驱动电动汽车稳定性控制[J]. 汽车工程,2021, 43(5): 721-729. |
| ZHONG Longfei, PENG Yuhui, JIANG Ming. Stability control of distributed driven electric vehicle based on phase plane[J]. Automotive Engineering,2021, 43(5): 721-729. | |
| [22] | 苏东旭,赵治国,赵坤,等. 基于可拓相平面稳定域划分的Tube-MPC车辆稳定性控制[J]. 汽车工程,2024, 46(9): 1654-1667. |
| SU Dongxu,ZHAO Zhiguo,ZHAO Kun,et al. Tube-MPC vehicle stability control based on stability domain division in extension phase plane[J]. Automotive Engineering,2024,46(9): 1654-1667. | |
| [23] | 马静雯. 车轮荷载作用下沥青路面表层水膜流动规律研究[D]. 南京:东南大学,2019. |
| MA Jingwen. Study on the law of water film flow of asphalt pavement under wheel load[D].Nanjing:Southeast University,2019. |
| [1] | Xiaokai Chen,Cheng Shen,Zhuoyi Wang,Xiang Liu. Research on Fixed-Time Control of Active Suspension System Considering Mismatched Disturbance [J]. Automotive Engineering, 2025, 47(7): 1394-1403. |
| [2] | Jie Hu,Zhiling Zhang,Jiefeng Zhong,Wenlong Zhao,Jiachen Zheng,Silong Zhou,Zijun Qu. A Hybrid Control Strategy for Light Commercial Vehicle Path Tracking Considering Complex Disturbances [J]. Automotive Engineering, 2024, 46(9): 1576-1586. |
| [3] | Xiaokai Chen,Feng Chen,Xiang Liu,Hongyu Liu,Xiaoyu Wang. Research on DOB-Based Switching Control Algorithm for Active Suspension System [J]. Automotive Engineering, 2024, 46(10): 1744-1754. |
| [4] | Bin Deng, Weihan Li, Di Wu, Bingzhan Zhang, Han Zhao. Integral Sliding Mode Control for Four-Wheel Active Steering Based on Kalman Filter Extended State Observer [J]. Automotive Engineering, 2024, 46(1): 100-108. |
| [5] | Lin He,Ziang Xu,Chunrong Huang,Chao Gong,Shuhua Li,Qin Shi. Research on Sliding Mode Control Algorithm for Angle Tracking Prediction of Steer-by-wire System [J]. Automotive Engineering, 2023, 45(12): 2200-2208. |
| [6] | Dongkui Tan,Gangjun Hu,Bo Zhu,Lai Jin,Jie Zhang. Intelligent Vehicle Autonomous Emergency Braking System Considering Safety of the Intended Functionality [J]. Automotive Engineering, 2022, 44(6): 799-808. |
| [7] | Sensen Cong,Feng Gao,Shucai Xu. Cooperative Control of Vehicle Lateral and Longitudinal Stability Based on Dynamic Stability Region [J]. Automotive Engineering, 2022, 44(6): 900-908. |
| [8] | Jian Zhao,Jinpeng Du,Bing Zhu,Zhiwei Wang,Zhicheng Chen,Xiaowen Tao. Longitudinal Cruise Control of Intelligent Vehicles Based on Adaptive Dynamic Sliding Mode Control [J]. Automotive Engineering, 2022, 44(1): 8-16. |
| [9] | Xiaohui Liu,Liangyao Yu,Sheng Zheng,Zhenghong Lu,Jian Song. Research on Redundant Anti-lock Braking Algorithm Based on eBooster [J]. Automotive Engineering, 2022, 44(1): 82-93. |
| [10] | Xiangjing Guo,Pan Sun,Jie Deng,Yong Liu,Zhuang Liu,Shuangping Liu. Research on AEB Control Strategy of a Heavy Tractor-Semitrailer Combination Based on BP Neural Network Algorithm Prediction [J]. Automotive Engineering, 2021, 43(9): 1350-1359. |
| [11] | Luming Chen,Zili Liao,Zheng Zhang. Design of Hierarchical Control System for Dual⁃steering of Multi⁃wheel Distributed Electric Drive Vehicles [J]. Automotive Engineering, 2021, 43(9): 1383-1393. |
| [12] | Guoqing Geng,Hao Li,Haobin Jiang,Jie Chen,Bin Tang. Research on Active Returnability Control for Electro⁃hydraulic Coupling Steering System of Commercial Vehicles [J]. Automotive Engineering, 2021, 43(6): 899-908. |
| [13] | Yue Ren,Jie Ji,Ying Zhao,Yixiao Liang,Ling Zheng. Path Tracking Control of Intelligent Vehicle Based on Minimal Model Error Estimation [J]. Automotive Engineering, 2021, 43(4): 580-587. |
| [14] | Shi Qiujun, Li Jing. Anti-Rollover Control of Bus Based on Nonlinear Disturbance Estimation [J]. Automotive Engineering, 2020, 42(9): 1224-1231. |
| [15] | Cai Yingfeng, Dou Lei, Chen Long, Shi Dehua, Wang Shaohua, Zhu Zhen. Research on Coordinated Control of Hybrid Electric VehicleBased on Compensation Sliding Mode Control [J]. Automotive Engineering, 2020, 42(4): 431-438. |
|
||