Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (7): 987-994.doi: 10.19562/j.chinasae.qcgc.2021.07.005
Previous Articles Next Articles
Qiang Gao1,Zhou Lu1,Chendong Duan2,Ting Xu1( )
)
Received:2020-11-03
Revised:2021-03-11
Online:2021-07-25
Published:2021-07-20
Contact:
Ting Xu
E-mail:annabelxu@163.com
Qiang Gao,Zhou Lu,Chendong Duan,Ting Xu. Research on Vehicle Vertical Parking Path Planning and Path Tracking[J].Automotive Engineering, 2021, 43(7): 987-994.
"

"
"
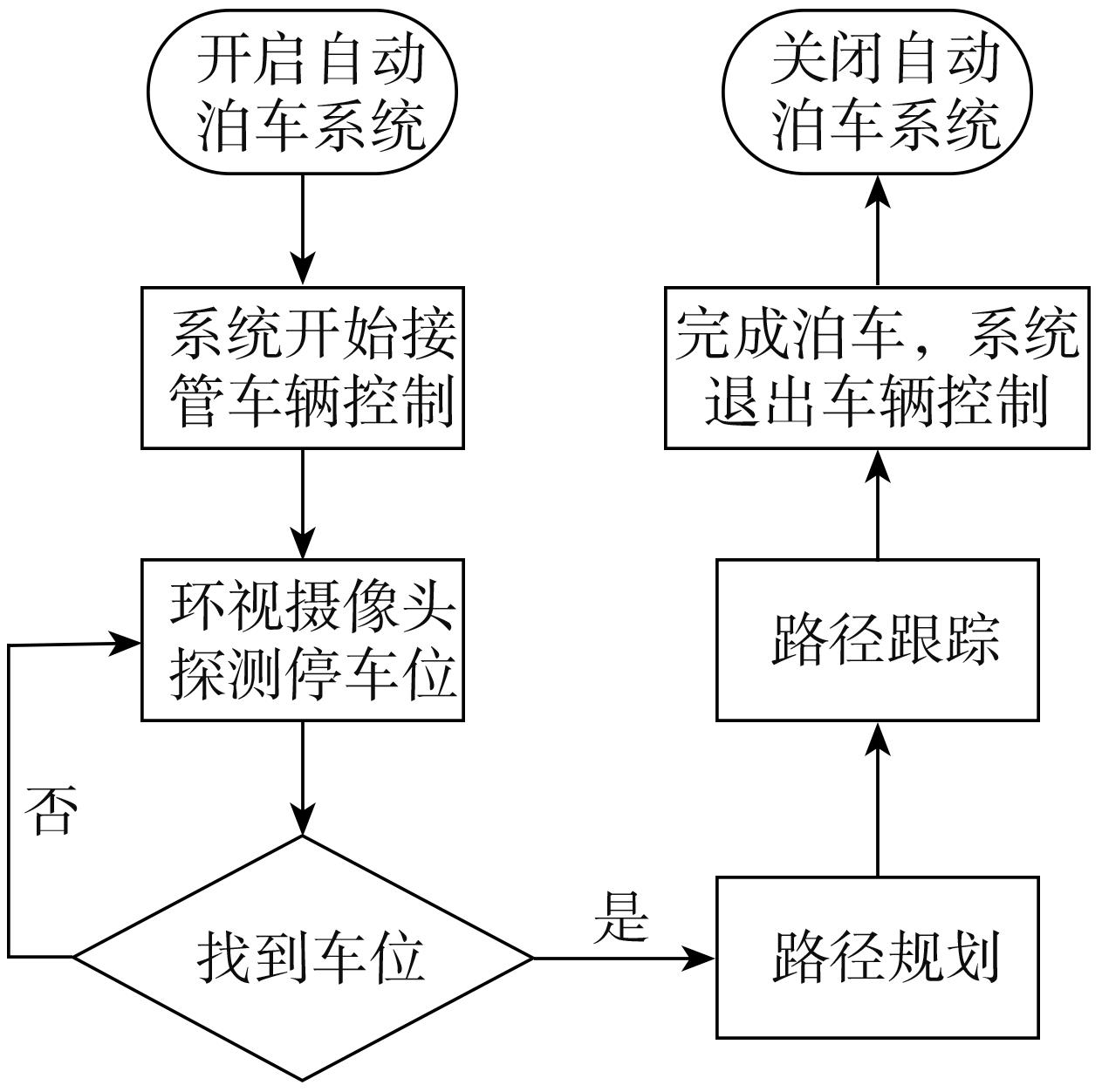
| 参数 | 数值 |
|---|---|
| 车长 | 4.718 5 |
| 车宽 | 1.857 |
| 轴距 | 2.76 |
| 前悬 | 0.953 |
| 后悬 | 1.004 5 |
"
"
"
"
"
"
"
"

"
"
"
"

"

"
"
"

"
"
| 1 | Jungseok CHO, PARK Jinrak, BAEK Untae. Automatic parking system using background subtraction with CCTV environment international conference on control, automation and systems [C]. 16th International Conference on Control, Automation and Systems (ICCAS),IEEE,2016. |
| 2 | ALABSI H,DEVARAJ J,SEBASTIAN P, et al. Vision⁃based automated parking system [C]. Information Sciences Signal Processing and Their Applications, 10th International Conference on. 2010. |
| 3 | 郭孔辉,李红,宋晓琳. 自动泊车系统路径跟踪控制策略研究[J]. 中国公路学报, 2015,28(9): 110-118. |
| GUO Konghui,LI Hong,SONG Xiaolin. Study on path tracking control strategy of automatic parking system[J]. China Journal of Highway and Transport, 2015, 28(9): 110-118. | |
| 4 | 熊周兵, 杨威, 丁可. 基于预瞄模糊控制的自动泊车算法研究[J]. 重庆理工大学学报(自然科学版), 2017,31(2): 14-22. |
| XIONG Zhoubing,YANG Wei,DING Ke. Research on the auto parking algorithm based on the preview fuzzy control [J]. Journal of Chongqing University of Technology (Natural Science), 2017, 31(2): 14-22. | |
| 5 | 明廷友. 智能汽车的轨迹跟随控制研究[D].长春:吉林大学, 2016. |
| MING Yanyou. Research on trajectory tracking control for intelligent vehicles [D]. Changchun: Jilin University,2016. | |
| 6 | 熊璐, 付志强, 柏满飞. 无人驾驶车辆的底层动力学控制研究[J]. 汽车技术, 2017(11): 1-6. |
| XIONG Lu, FU Zhiqiang, BAI Manfei. Research on the bottom dynamic control for unmanned ground Vehicle [J]. Automobile Technology, 2017(11): 1-6. | |
| 7 | 张闻宇,丁幼春,王雪玲. 基于SVR逆向模型的拖拉机导航纯追踪控制方法[J]. 农业机械学报,2016,47(1):29-36. |
| ZHANG Wenyu,DING Youchun,WANG Xueling. Pure pursuit control method based on svr inverse⁃model for tractor navigation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016,47(1):29-36. | |
| 8 | MACADAM Charles. Application of an optimal preview control for simulation of closed⁃loop automobile driving [J]. IEEE Transactions on Systems, Man and Cybernetics, 1981, 11(6): 393-399. |
| 9 | 郭孔辉.驾驶员—汽车闭环系统操纵运动的预瞄最优曲率模型[J]. 汽车工程, 1984,6(3): 3-18. |
| GUO Konghui. Optimal preview curvature model for driver⁃vehicle closed⁃loop system movement control [J]. Automobile Technology, 1984,6(3): 3-18. |
| [1] | Tianfei Ma,Bo Li,Bing Zhu,Jian Zhao. Ultrasonic Radar Modeling of Automatic Parking System Considering Atmospheric Conditions Effect [J]. Automotive Engineering, 2023, 45(9): 1646-1654. |
| [2] | Yougang Bian,Tiantian Zhang,Heping Xie,Hongmao Qin,Zeyu Yang. Anti-disturbance and Anti-corner-cutting Control for Collaborative Path Tracking of Vehicle Platoon [J]. Automotive Engineering, 2023, 45(8): 1320-1332. |
| [3] | Ping Liu, Zhuo Chen, Mingjie Liu, Changhao Piao, Soohyun Jang, Kailin Wan. Gauss Allocation Points Parameterization Parallel Automatic Parking Trajectory Planning for Vehicle Under Multi-Stage Constraints [J]. Automotive Engineering, 2023, 45(7): 1163-1173. |
| [4] | Zuohua Miao,Liangjian Zhu,Chengcheng Zhao,Daiwen Liu,Yiwen Li,Aoguang Chen. Image Enhancement of Low-Light Parking Space Based on Retinex [J]. Automotive Engineering, 2023, 45(6): 989-996. |
| [5] | Manjiang Hu,Binjie Mou,Zeyu Yang,Yougang Bian,Xiaohui Qin,Biao Xu. A Hybrid A* Path Planning Method Based on DBSCAN and Dichotomy [J]. Automotive Engineering, 2023, 45(3): 341-349. |
| [6] | Jie Hu,Qi Zhu,Ruipeng Chen,Minchao Zhang,Zhihao Zhang,Haoyan Liu. Global Path Planning of Intelligent Vehicle with Must-Pass Nodes [J]. Automotive Engineering, 2023, 45(3): 350-360. |
| [7] | Jie Hu,Haoyan Liu,Minchao Zhang,Zhihao Zhang,Qi Zhu,Ruipeng Chen,Man Luo. Research on the Decision and Planning System of Automated Valet Parking Based on Finite State Machine [J]. Automotive Engineering, 2023, 45(2): 243-252. |
| [8] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [9] | Jie Hu,Ruipeng Chen,Zhihao Zhang,Bowen Xiang,Haoyan Liu,Qi Zhu,Qixiang Guo. Path Tracking Control of Autonomous Truck Based on RMPC [J]. Automotive Engineering, 2023, 45(11): 2092-2103. |
| [10] | Minghui Ren,Jun Liang,Long Chen,Chun Zhang,Yun Wang. Multi-AGV Path Planning for Intelligent Garage Based on Improved Conflict Search [J]. Automotive Engineering, 2023, 45(10): 1933-1943. |
| [11] | Shukai Zhang,Hui Chen,Meicen Liu. Control Method of Path Following for Automatic Parking System [J]. Automotive Engineering, 2022, 44(7): 1027-1039. |
| [12] | Jie Hu,Linglei Zhu,Ruinan Chen,Xinkai Zhong,Wencai Xu,Minchao Zhang. Research on Parallel Parking Path Planning Method for Narrow Parking Space [J]. Automotive Engineering, 2022, 44(7): 1040-1048. |
| [13] | Jun Li,Wenxing Wan,Sanqiang Hao,Wu Qin,Feifei Liu. Research on Model Predictive Control of Autonomous Vehicle Path Tracking Under Complex Road Condition [J]. Automotive Engineering, 2022, 44(5): 664-674. |
| [14] | Longxin Guan,Zufei Gu,Chao Zhang,Aichun Wang,Chenruo Peng,Huihua Jiang,Xiaojian Wu. Model Predictive Path Following Control of Intelligent Vehicles Considering System Complex Disturbances [J]. Automotive Engineering, 2022, 44(12): 1844-1855. |
| [15] | Weichen Wang,Junqiu Li,Fengchun Sun,Jian Song,Yonghua Wu. Path Tracking Strategy for All-Wheel Steering of Multi-axle Heavy-Duty Vehicles Based on Tube MPC [J]. Automotive Engineering, 2022, 44(11): 1665-1675. |