Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (7): 995-1004.doi: 10.19562/j.chinasae.qcgc.2021.07.006
Previous Articles Next Articles
Zhiyong Zhang1( ),Kai Long1,Ronghua Du1,Caixia Huang2
),Kai Long1,Ronghua Du1,Caixia Huang2
Received:2020-08-28
Revised:2021-01-28
Online:2021-07-25
Published:2021-07-20
Contact:
Zhiyong Zhang
E-mail:zzy04@163.com
Zhiyong Zhang,Kai Long,Ronghua Du,Caixia Huang. Trajectory Tracking Coordinated Control for Autonomous Vehicle in High⁃speed Overtaking[J].Automotive Engineering, 2021, 43(7): 995-1004.
"
"
"

"

"
"
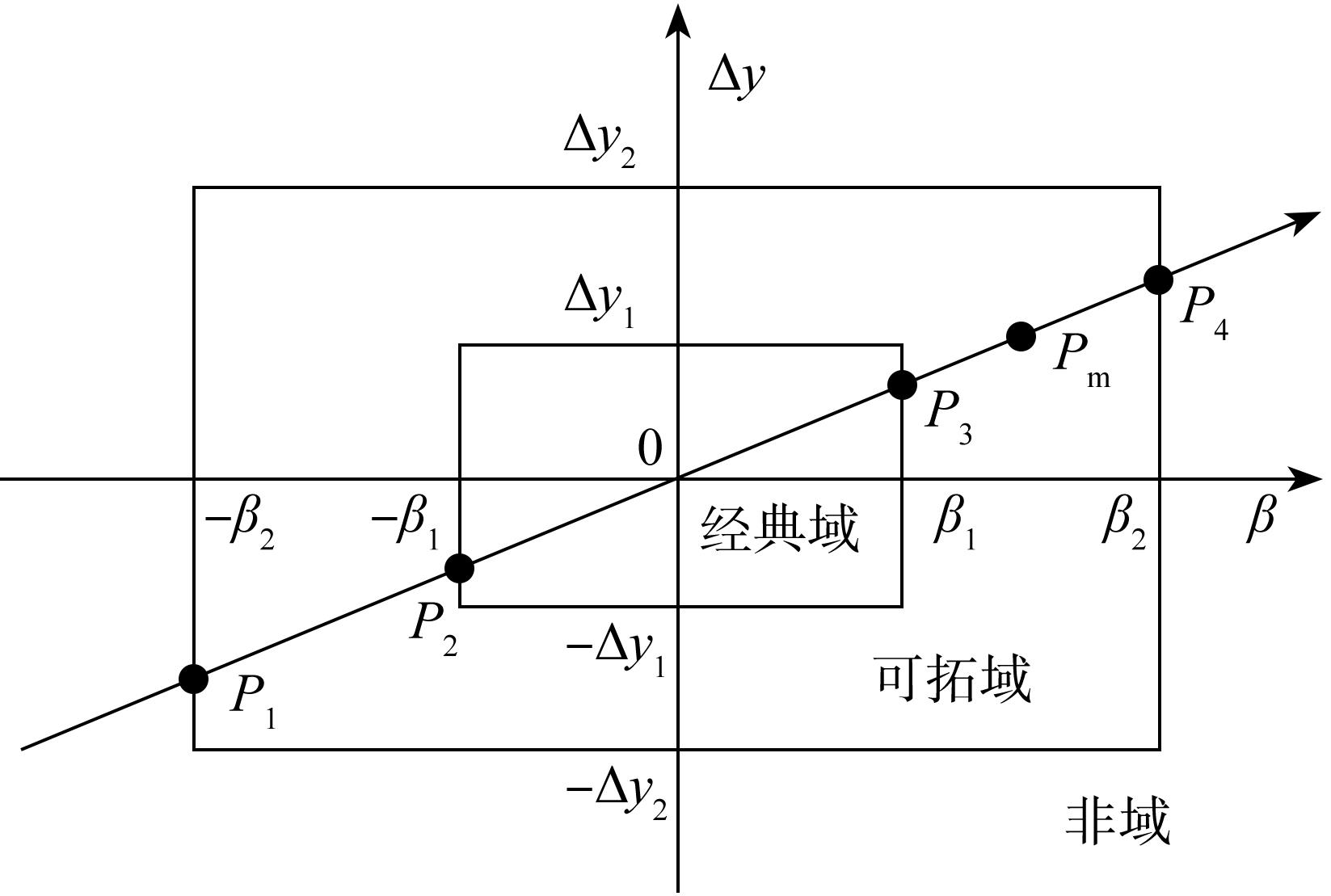
| Pm的位置 | [-∞,P1] | [P1,0] | [0,P4] | [P4,+∞] |
|---|---|---|---|---|
| dkt | |PmP1| | -|PmP1| | -|PmP4| | |PmP4| |
| Pm的位置 | [-∞,P2] | [P2,0] | [0,P3] | [P3,+∞] |
| djd | |PmP2| | -|PmP2| | -|PmP3| | |PmP3| |
"
"
| 参数 | 数值 |
|---|---|
| 整车质量m/kg | 1 575 |
| 质心与前轴的间距lf /m | 1.2 |
| 质心与后轴的间距lr /m | 1.6 |
| 车身绕Z轴的转动惯量Iz /(kg·m-2) | 2 875 |
| 前轮的侧偏刚度Cf /(N·(°)-1) | 20 000 |
| 后轮的侧偏刚度Cr /(N·(°)-1) | 35 000 |

"
"
"

"
"
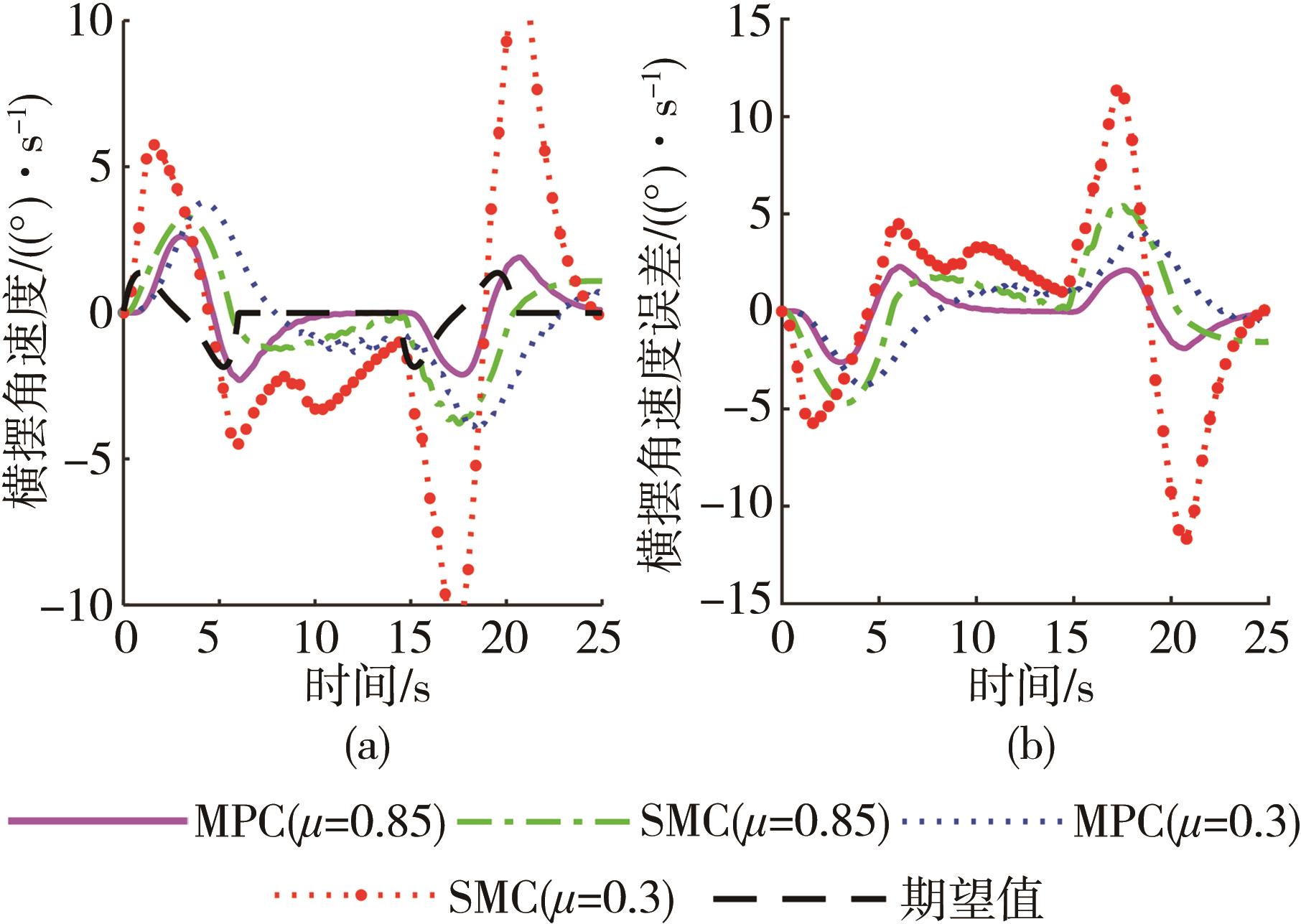
| 路面附着系数 | 控制策略 | 性能指标 | |||
|---|---|---|---|---|---|
| ey?max/m | ey?rms/m | eγ?max/((°)·s-1) | eγ?rms/((°)·s-1) | ||
| μ=0.85 | SMC | 1.35 | 0.59 | 5.42 | 2.51 |
| 单目标MPC | 0.30 | 0.12 | 2.61 | 1.20 | |
| μ=0.3 | SMC | 9.34 | 6.83 | 11.71 | 4.96 |
| 单目标MPC | 0.31 | 0.12 | 4.06 | 1.94 | |
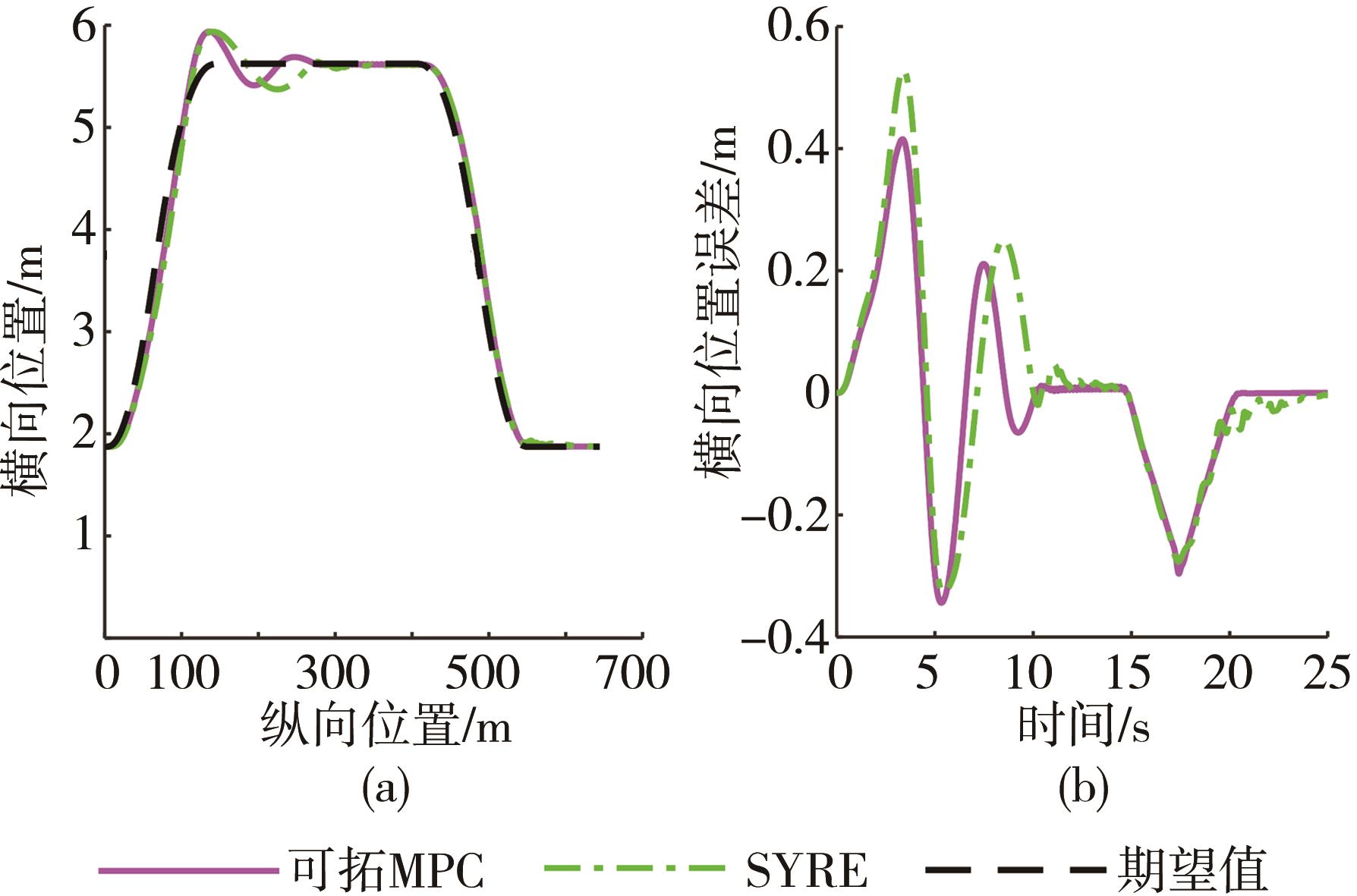
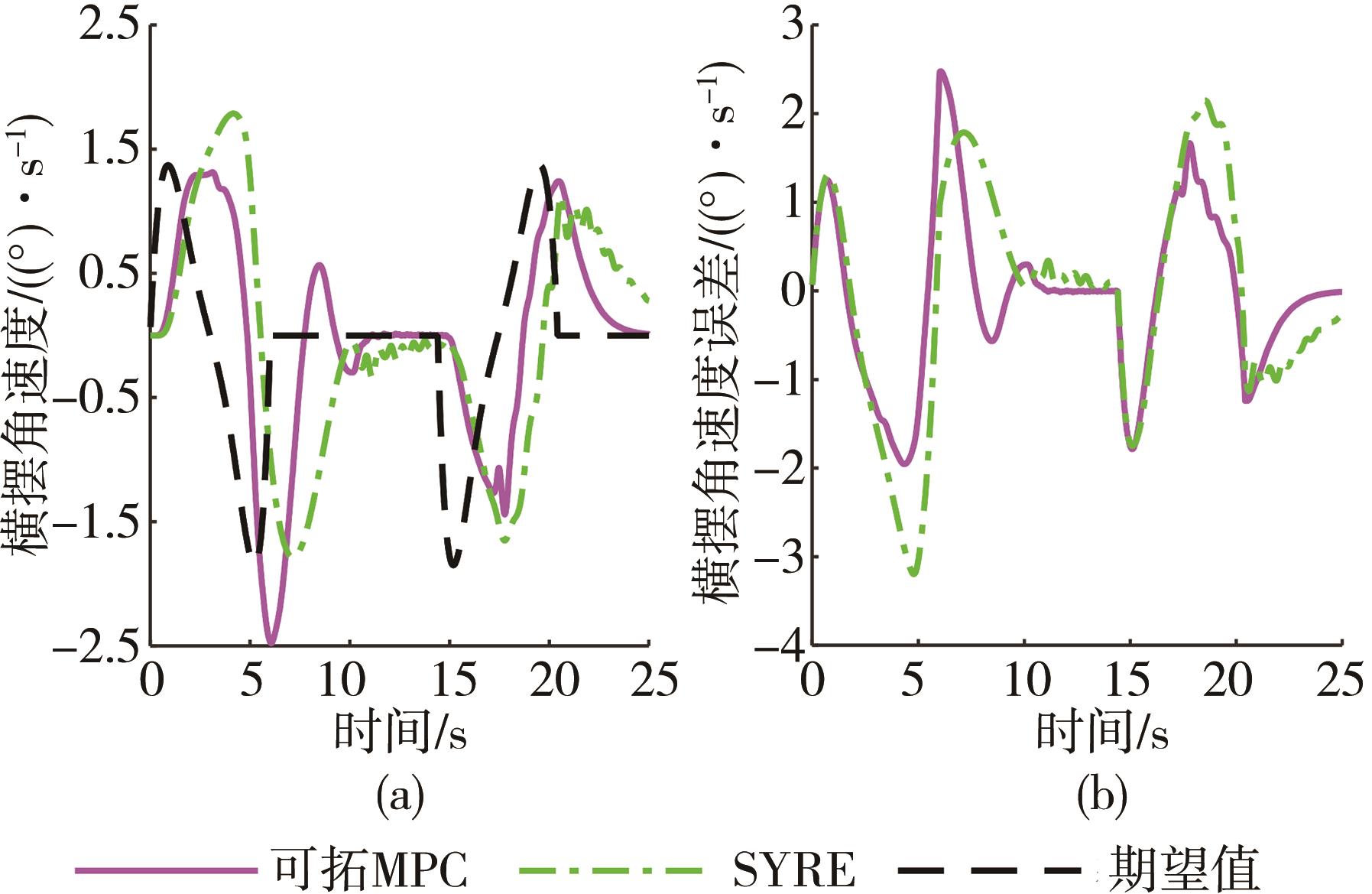
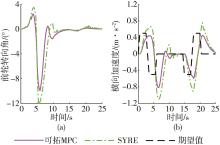
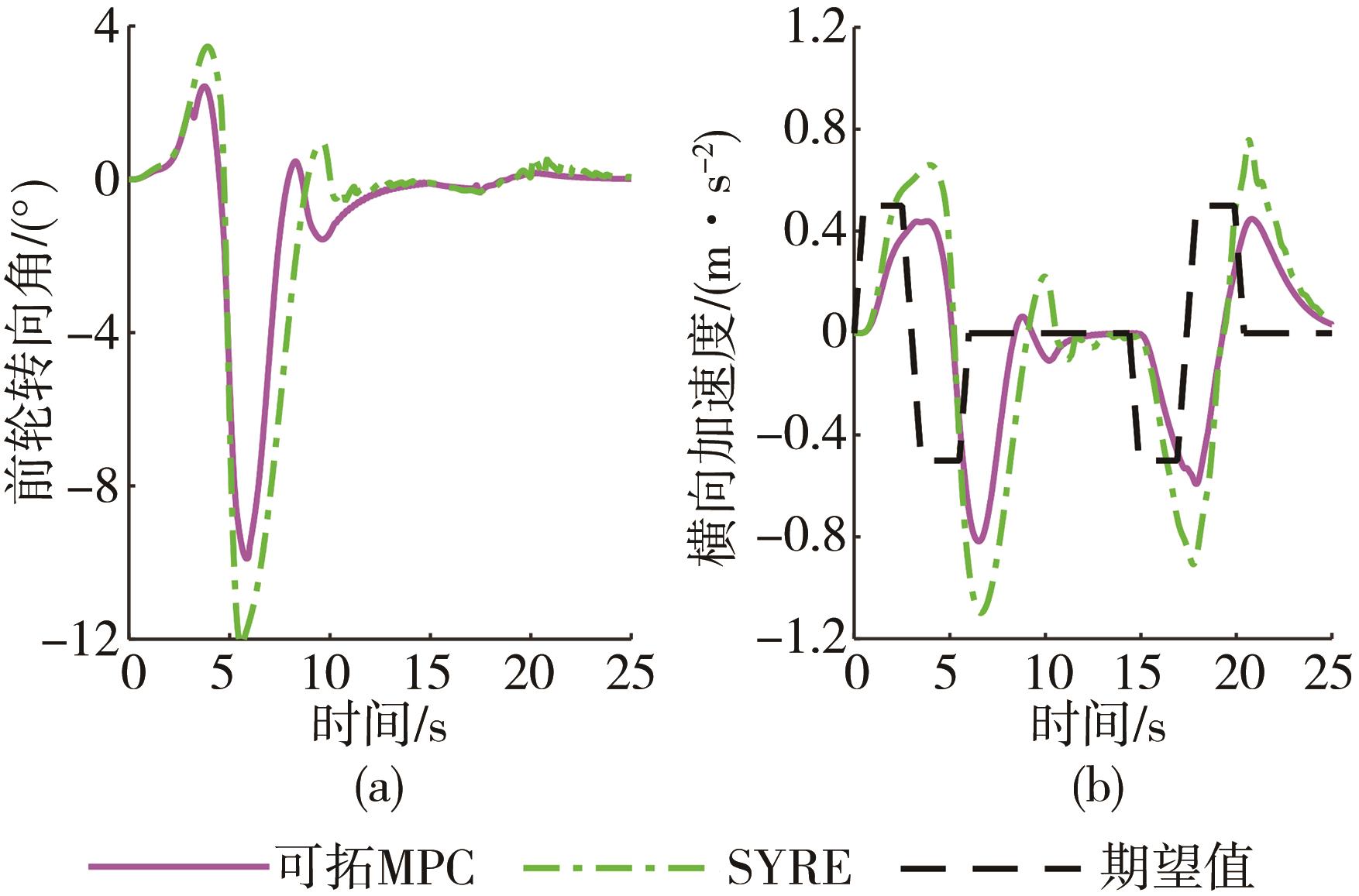
| SYRE | 0.53 | 0.18 | 3.20 | 1.28 | |
| 可拓MPC | 0.41 | 0.11 | 2.48 | 0.95 | |
"
| 1 | BONNEFON J F, SHARIFF A, RAHWAN I. The social dilemma of autonomous vehicles[J]. Science, 2016, 352(6293): 1573-1576. |
| 2 | ZHANG R, ZHANG Z, GUAN Z, et al. Autonomous lane changing control for intelligent vehicles[J]. Cluster Computing, 2019, 22(4): 8657-8667 |
| 3 | 蔡英凤, 臧勇, 孙晓强, 等. 基于可拓切换控制方法的智能车辆车道保持系统研究[J].中国公路学报, 2019, 32(6): 43-52. |
| CAI Y F, ZANG Y, SUN X Q, et al. Lane-keeping system of intelligent vehicle based on extension switching control method[J]. China Journal of Highway and Transport, 2019, 32(6): 43-53. | |
| 4 | DIXIT S, MONTANARO U, DIANATI M, et al. Trajectory planning for autonomous high-speed overtaking in structured environments using robust MPC[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(6): 2310-2323. |
| 5 | XU L, ZHUANG W, YIN G, et al. Robust overtaking control of autonomous electric vehicle with parameter uncertainties[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(13): 3358-3376. |
| 6 | 冀杰, 唐志荣, 吴明阳, 等. 面向车道变换的路径规划及模型预测轨迹跟踪[J]. 中国公路学报, 2018, 31(4): 176-183. |
| JI J, TANG Z R, WU M Y, et al. Path planning and tracking for lane changing based on model predictive contrl[J]. China Journal of Highway and Transport, 2018, 31(4): 176-183. | |
| 7 | HWANG C L, YANG C C, HUNG J Y. Path tracking of an automatic ground vehicle with different payloads by hierarchical improved fuzzy dynamic sliding-mode control[J]. IEEE Transactions on Fuzzy Systems, 2017, 26(4): 899-914. |
| 8 | 任殿波, 崔胜民, 吴杭哲. 车道保持预瞄控制及其稳态误差分析[J]. 汽车工程, 2016, 38(2): 192-199. |
| REN D B, CUI S M, WU Z H. Preview control for lane keeping and its steady⁃state error analysis[J]. Automotive Engineering, 2016, 38(2): 192-199. | |
| 9 | 杭鹏,陈辛波,张榜,等. 四轮独立转向-独立驱动电动车主动避障路径规划与跟踪控制[J]. 汽车工程,2019, 41(2): 170-176. |
| HANG P, CHEN X B, ZHANG B, et al.Path planning and tracking control for collision avoidance of a 4WIS-4WID electric vehicle[J]. Automotive Engineering, 2019, 41(2): 170-176. | |
| 10 | JI J , KHAJEPOUR A , MELEK W W , et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2):952-964. |
| 11 | 徐兴,卢山峰,陈龙,等. 基于差动和自主转向协调的分布式驱动无人车轨迹跟踪[J].汽车工程, 2018, 40(4): 104-110. |
| XU U, LU S,CHENG L,et al. Self⁃driving vehicle based on coordination between autonomous steering and differential steering[J]. Automotive Engineering, 2018, 40(4): 475-481. | |
| 12 | 陈特, 陈龙, 徐兴, 等. 分布式驱动无人车路径跟踪与稳定性协调控制[J]. 汽车工程, 2019, 41(10): 1190-1116. |
| CHEN T, CHEN L, XU X,et al. Integrated control of unmanned distributed driven vehicles path tracking and stability[J]. Automotive Engineering, 2019, 41(10): 1190-1116. | |
| 13 | 徐兴, 汤赵, 王峰, 等. 基于变权重系数的分布式驱动无人车轨迹跟踪[J]. 中国公路学报, 2019, 32(12): 36-45. |
| XU X, TANG Z, WANG F, et al. Varied weight coefficients based trajectory tracking of distributed drive self-driving vehicle[J]. China Journal of Highway and Transport, 2019, 32(12): 36-45. | |
| 14 | 许伦辉,胡三根,伍帅,等. 考虑车辆运行特性的双车道超车模型[J].华南理工大学学报(自然科学版), 2015, 43(4): 7-13. |
| XU L H, HU S G, WU S, et al. Overtaking model for two-lane highway considering vehicle running characteristics[J]. Journal of South China University of Technology: Natural Science Edition, 2015, 43(4): 7-13. | |
| 15 | GUO L, GE P, YUE M, et al. Lane changing trajectory planning and tracking controller design for intelligent vehicle running on curved road[J]. Mathematical Problems in Engineering, 2014, 2014: 1-9. |
| 16 | 王家恩, 陈无畏, 王檀彬, 等. 基于期望横摆角速度的视觉导航智能车辆横向控制[J]. 机械工程学报, 2012, 48(4): 108-115. |
| WANG J E, CHEN W W, WANG T B, et al. Vision guided intelligent vehicle lateral control based on desired yaw rate[J]. Journal of Mechanical Engineering, 2012, 48(4): 108-115. | |
| 17 | SUH J, CHAE H, YI K. Stochastic model⁃predictive control for lane change decision of automated driving vehicles[J]. IEEE Transactions on Vehicular Technology, 2018, 67(6): 4771-4782. |
| 18 | ZHANG C, CHU D, LIU S, et al. Trajectory planning and tracking for autonomous vehicle based on state lattice and model predictive control[J]. IEEE Intelligent Transportation Systems Magazine, 2019, 11(2): 29-40. |
| 19 | JIE J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 20 | 王其东, 王金波, 陈无畏, 等. 基于汽车行驶安全边界的EPS与ESP协调控制策略[J].机械工程学报, 2016, 52(6): 99-107. |
| WANG Q D, WANG J B, CHEN W W, et al. Coordinated control strategy of EPS and ESP based on vehicle driving safe boundary[J]. Journal of Mechanical Engineering, 2016, 52(6): 99-107. | |
| 21 | 陈无畏,孙晓文,汪洪波. 汽车差动助力转向系统的可拓协调控制[J]. 中国科学: 技术科学, 2017, 47(3): 324-335. |
| CHEN W W, SUN X W, WANG H B. Extension coordinated control of automotive differential drive assisted steering system[J]. Scientia Sinica(Technologica), 2017, 47(3): 324-335. | |
| 22 | 赵治国,周良杰, 朱强. 无人驾驶车辆路径跟踪控制预瞄距离自适应优化[J].机械工程学报, 2018, 54(24): 180-187. |
| ZHAO Z G, ZHOU L J, ZHU Q. Preview distance adaptive optimization for the path tracking control of unmanned vehicle[J]. Journal of Mechanical Engineering, 2018, 54(24): 180-187. |
| [1] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [2] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [3] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [4] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [5] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [6] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [7] | Yinghong Yu,Li Huang,Yinong Li,Ling Zheng,Jia Zhou,Yixiao Liang. Research on Emergency Trajectory Tracking Control Based on Dynamics Decoupling [J]. Automotive Engineering, 2023, 45(6): 997-1009. |
| [8] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [9] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [10] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [11] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [12] | Manjiang Hu,Binjie Mou,Zeyu Yang,Yougang Bian,Xiaohui Qin,Biao Xu. A Hybrid A* Path Planning Method Based on DBSCAN and Dichotomy [J]. Automotive Engineering, 2023, 45(3): 341-349. |
| [13] | Jie Hu,Qi Zhu,Ruipeng Chen,Minchao Zhang,Zhihao Zhang,Haoyan Liu. Global Path Planning of Intelligent Vehicle with Must-Pass Nodes [J]. Automotive Engineering, 2023, 45(3): 350-360. |
| [14] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |
| [15] | Jie Hu,Haoyan Liu,Minchao Zhang,Zhihao Zhang,Qi Zhu,Ruipeng Chen,Man Luo. Research on the Decision and Planning System of Automated Valet Parking Based on Finite State Machine [J]. Automotive Engineering, 2023, 45(2): 243-252. |