Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (9): 1654-1667.doi: 10.19562/j.chinasae.qcgc.2024.09.013
Dongxu Su1,Zhiguo Zhao1( ),Kun Zhao1,Gang Li2,Qin Yu1
),Kun Zhao1,Gang Li2,Qin Yu1
Received:2024-03-03
Revised:2024-04-15
Online:2024-09-25
Published:2024-09-19
Contact:
Zhiguo Zhao
E-mail:zhiguozhao@tongji.edu.cn
Dongxu Su,Zhiguo Zhao,Kun Zhao,Gang Li,Qin Yu. Tube-MPC Vehicle Stability Control Based on Stability Domain Division in Extension Phase Plane[J].Automotive Engineering, 2024, 46(9): 1654-1667.
"

"

"
| 参数 | 数值 |
|---|---|
| 整车质量/kg | 1 650 |
| 轴距/m | 3.05 |
| 质心到前轴距离/m | 1.4 |
| 质心到后轴距离/m | 1.65 |
| 轮距/m | 1.60 |
| 整车绕z轴转动惯量/( | 3 234 |
"

"
"
"

"

"

"
"
"
| 参数 | 数值 | |
|---|---|---|
| 离散步长T/s | 0.01 | |
| 预测时域 | 10 | |
| 控制时域 | 7 | |
| 横摆力偶矩 | 约束范围 | [-1 200, 1 200] |
| 增量约束范围 | [-Inf, Inf] | |
| 前轮转角 | 约束范围 | [-0.52, 0.52] |
| 增量约束范围 | [-0.026, 0.026] | |
"
"
控制 算法 | 质心侧偏角 误差/rad | 横摆角速度 误差/(rad·s-1) | 行驶轨迹 误差/m | |||
|---|---|---|---|---|---|---|
| RMS | Max | RMS | Max | RMS | Max | |
| 无控制 | 0.068 3 | 0.188 1 | 0.199 2 | 0.782 7 | 0.378 4 | 2.022 5 |
| MPC | 0.016 3 | 0.035 7 | 0.044 2 | 0.175 2 | 0.252 5 | 0.795 9 |
| AMPC | 0.007 9 | 0.020 0 | 0.022 0 | 0.069 2 | 0.200 4 | 0.619 2 |

"
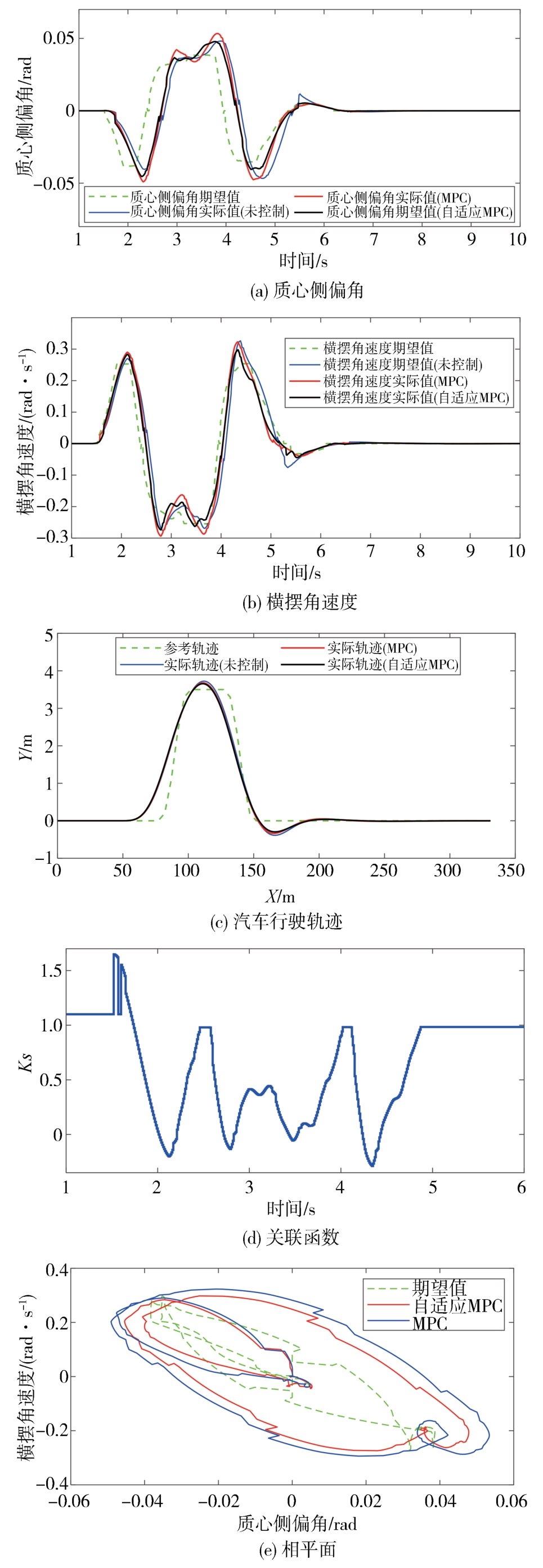
"
控制 算法 | 质心侧偏角 误差/rad | 横摆角速度 误差/(rad·s-1) | 行驶轨迹 误差/m | |||
|---|---|---|---|---|---|---|
| RMS | Max | RMS | Max | RMS | Max | |
| 无控制 | 0.017 8 | 0.068 9 | 0.050 7 | 0.242 1 | 0.148 9 | 0.610 9 |
| MPC | 0.017 0 | 0.060 6 | 0.045 8 | 0.186 6 | 0.148 7 | 0.513 0 |
| AMPC | 0.013 2 | 0.047 3 | 0.031 6 | 0.130 6 | 0.147 9 | 0.452 3 |
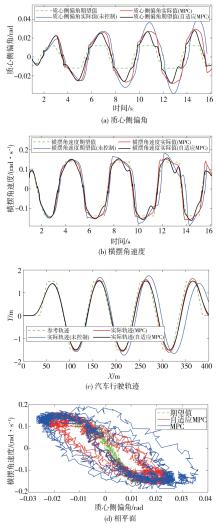
"

"
控制 算法 | 质心侧偏角 误差/rad | 横摆角速度 误差/(rad·s-1) | 行驶轨迹 误差/m | |||
|---|---|---|---|---|---|---|
| RMS | Max | RMS | Max | RMS | Max | |
| 无控制 | 0.015 6 | 0.034 2 | 0.038 9 | 0.127 5 | 0.436 2 | 0.486 6 |
| MPC | 0.012 4 | 0.025 5 | 0.027 0 | 0.101 8 | 0.201 8 | 0.239 0 |
| ATMPC | 0.008 0 | 0.016 1 | 0.022 3 | 0.065 6 | 0.180 1 | 0.059 6 |
"
| Δkp模糊控制规则 | ||||||||
|---|---|---|---|---|---|---|---|---|
| Δkp | e(s) | |||||||
| NB | NM | NS | ZE | PS | PM | PB | ||
| Δe(s) | NB | PB | PB | PM | PM | PS | NS | NS |
| NM | PB | PB | PM | PM | PS | NS | NS | |
| NS | PB | PB | PM | PS | NS | NM | NM | |
| Z | PB | PB | PM | Z | NS | NM | NB | |
| PS | PM | PM | PS | NS | NM | NB | NB | |
| PM | PS | PS | NS | NM | NM | NB | NB | |
| PB | PS | PS | NS | NM | NM | NB | NB | |
| Δki模糊控制规则 | ||||||||
| Δki | e(s) | |||||||
| NB | NM | NS | ZE | PS | PM | PB | ||
| Δe(s) | NB | NB | NB | NM | NM | NM | Z | Z |
| NM | NB | NM | NM | NM | NS | Z | Z | |
| NS | NM | NM | NS | NS | Z | PS | PS | |
| Z | NM | NS | NS | Z | PS | PS | PM | |
| PS | NS | NS | Z | PS | PS | PM | PM | |
| PM | Z | Z | PS | PM | PM | PB | PB | |
| PB | Z | Z | PS | PM | PB | PB | PB | |
| Δkd模糊控制规则 | ||||||||
| Δkd | e(s) | |||||||
| NB | NM | NS | ZE | PS | PM | PB | ||
| Δe(s) | NB | PS | PS | Z | Z | Z | PS | PB |
| NM | NB | NB | NM | NS | PM | PB | PM | |
| NS | NB | NB | NM | NS | PS | PS | PM | |
| Z | NS | NS | NS | NS | Z | PS | PB | |
| PS | NB | NB | NM | NS | PS | PB | PB | |
| PM | NB | NB | NM | NS | PM | PB | PB | |
| PB | PS | PS | Z | Z | Z | PS | PS | |
"
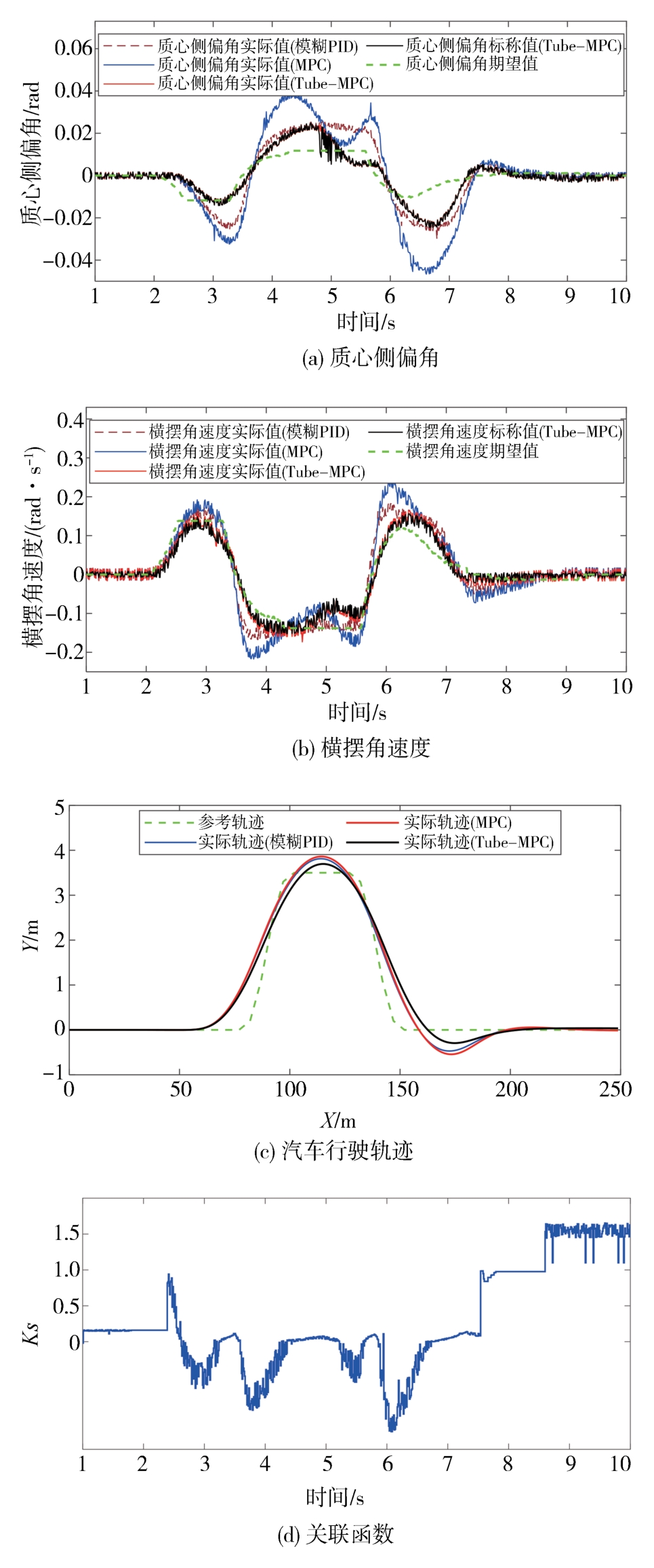
"
控制 算法 | 质心侧偏角 误差/rad | 横摆角速度 误差/(rad·s-1) | 行驶轨迹 误差/m | |||
|---|---|---|---|---|---|---|
| RMS | Max | RMS | Max | RMS | Max | |
| MPC | 0.016 1 | 0.044 3 | 0.049 5 | 0.229 3 | 0.215 9 | 0.905 5 |
| 模糊PID | 0.009 6 | 0.028 8 | 0.029 6 | 0.140 9 | 0.203 1 | 0.782 8 |
| ATMPC | 0.005 9 | 0.019 5 | 0.025 9 | 0.072 3 | 0.196 1 | 0.489 6 |
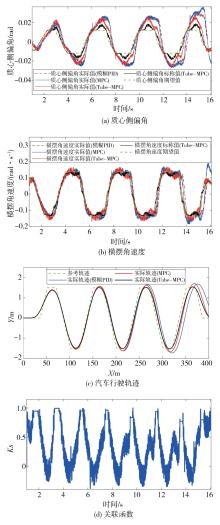
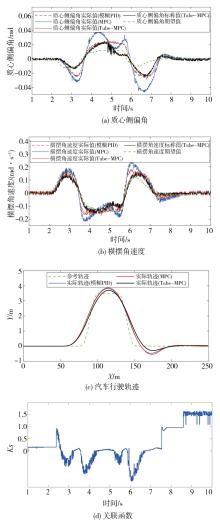
"
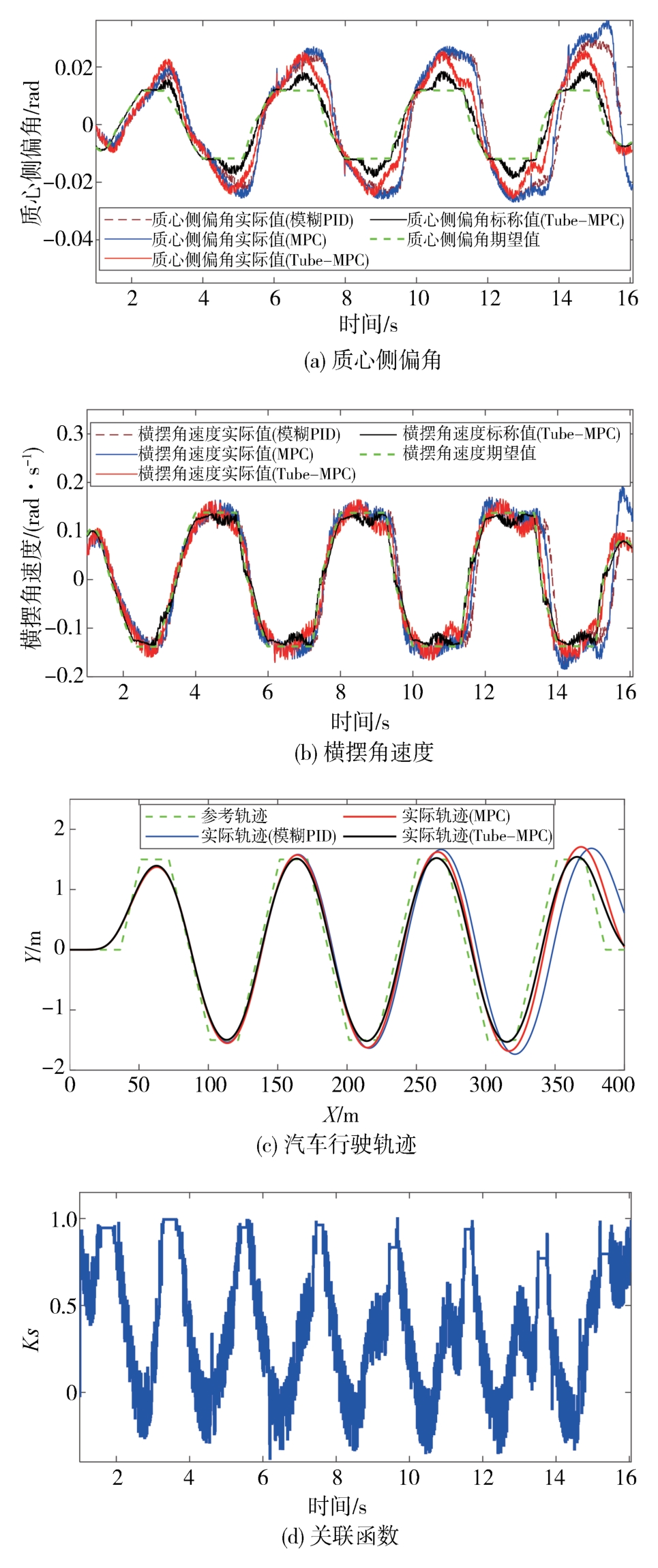
"
控制 算法 | 质心侧偏角 误差/rad | 横摆角速度 误差/(rad·s-1) | 行驶轨迹 误差/m | |||
|---|---|---|---|---|---|---|
| RMS | Max | RMS | Max | RMS | Max | |
| MPC | 0.012 9 | 0.040 2 | 0.037 2 | 0.163 9 | 0.239 8 | 0.391 5 |
| 模糊PID | 0.011 0 | 0.026 2 | 0.028 3 | 0.107 4 | 0.351 1 | 0.419 9 |
| ATMPC | 0.007 6 | 0.017 5 | 0.023 5 | 0.072 7 | 0.182 0 | 0.073 0 |
| 1 | TIAN J, WANG Q, DING J, et al. Integrated control with DYC and DSS for 4WID electric vehicles[J]. IEEE Access, 2019, 7: 124077-124086. |
| 2 | ZHAI L, SUN T, WANG J. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4726-4739. |
| 3 | 赵治国,陈晓蓉,梁凯冲,等.考虑乘坐舒适性的纯电动公交车辆稳定性控制[J].机械工程学报,2023,59(10):250-262. |
| ZHAO Zhiguo, CHEN Xiaorong, LIANG Kaichong, et al. Stability control method for the electric city bus considering riding comfort[J]. Journal of Mechanical Engineering, 2023,59(10):250-262. | |
| 4 | LIANG X, WANG Q, CHEN W, et al. Coordinated control of distributed drive electric vehicle by TVC and ESC based on function allocation[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(4): 606-620. |
| 5 | BEAL C E,BOBIER C G,GERDES J C. Controlling vehicle instability through stable handling envelopes[C]. Proceedings of the 2011 Dynamic Systems and Control Conference,Arlington,2011. |
| 6 | ZHANG L, JIANG L, LIU H, et al. Coordinated longitudinal and lateral stability improvement for electric vehicles based on a real-time NMPC strategy[J]. IEEE Transactions on Intelligent Transportation Systems, 2023. |
| 7 | ATAEI M, KHAJEPOUR A, JEON S. Model predictive control for integrated lateral stability, traction/braking control, and rollover prevention of electric vehicles[J]. Vehicle System Dynamics, 2020, 58(1):49-73. |
| 8 | HAJILOO R, KHAJEPOUR A, KASAIEZADEH A, et al. A prioritisation model predictive control for multi-actuated vehicle stability with experimental verification[J]. Vehicle System Dynamics, 2023, 61(8): 2144-2163. |
| 9 | CAIRANO S, TSENG H, BER D, et al. Vehicle yaw stability control by coordinated active front steering and differential braking in the tire sideslip angles domain[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4):1236-1248. |
| 10 | JALALI M, HASHEMI E, KHAJEPOUR A, et al. A combined-slip predictive control of vehicle stability with experimental verification[J]. Vehicle System Dynamics, 2017, 56(2): 319-340. |
| 11 | GUO H, LIU F, XU F, et al. Nonlinear model predictive lateral stability control of active chassis for intelligent vehicles and its FPGA implementation[J]. IEEE Transactions on Systems Man & Cybernetics Systems, 2017, 99:1-12. |
| 12 | ZHANG H, WANG J. Vehicle lateral dynamics control through AFS/DYC and robust gain-scheduling approach[J]. IEEE Transactions on Vehicular Technology, 2015, 65(1): 489-494. |
| 13 | WASIM M, KASHIF A S, ALI A, et al. Integrated AFS and DYC using predictive controller for vehicle handling improvement[C]. 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST). IEEE, 2021: 568-573. |
| 14 | 蔡文,杨春燕.可拓学的基础理论与方法体系[J].科学通报,2013,58(13):1190-1199. |
| CAI Wen, YANG Chunyan. Basic theory and methodology on extenics[J]. Chinese Science Bulletin,2013,58(13):1190-1199. | |
| 15 | MAYNE D Q, SERON M M, RAKOVIĆ S V. Robust model predictive control of constrained linear systems with bounded disturbances[J]. Automatica, 2005, 41(2): 219-224. |
| 16 | ALAGAPPAN A V,RAO K V N,KUMAR R K. A comparison of various algorithms to extract magic formula tire model coefficients for vehicle dynamics simulations[J]. Vehicle System Dynamics,2015,53(2):154-178. |
| 17 | 吴西涛,魏超,翟建坤,等.考虑横摆稳定性的无人车轨迹跟踪控制优化研究[J].机械工程学报,2022,58(6):130-142. |
| WU Xitao,WEI Chao,ZHAI Jiankun,et al. Study on the optimization of autonomous vehicle on path-following considering yaw stability[J]. Journal of Mechanical Engineering,2022,58(6):130-142. | |
| 18 | 陈无畏,王晓,谈东奎,等.基于最小能耗的电动汽车横摆稳定性灰色预测可拓控制研究[J].机械工程学报,2019,55(2):156-167. |
| CHEN Wuwei, WANG Xiao, TAN Dongkui, et al. Study on the grey predictive extension control of yaw stability of electric vehicle based on the minimum energy consumption[J]. Journal of Mechanical Engineering, 2019,55(2):156-167. | |
| 19 | RAKOVIC S V, KERRIGAN E C, KOURAMAS K I, et al. Invariant approximations of the minimal robust positively invariant set[J]. IEEE Transactions on Automatic Control, 2005,50(3):406-410. doi: 10.1109/TAC.2005.843854. |
| 20 | KOUVARITAKIS B, CANNON M. Model predictive control[M]. Switzerland: Springer International Publishing, 2016. |
| 21 | HANG P, XIA X, CHEN G, et al. Active safety control of automated electric vehicles at driving limits: a tube-based MPC approach[J]. IEEE Transactions on Transportation Electrification, 2021, 8(1): 1338-1349. |
| [1] | Bing Zhou,Kangqiang Zheng,Ru Wang,Xiaojian Wu,Tian Chai. Adaptive Collision Avoidance Control Considering Available Road Width [J]. Automotive Engineering, 2024, 46(5): 893-905. |
| [2] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [3] | Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory [J]. Automotive Engineering, 2023, 45(1): 20-31. |
| [4] | Sensen Cong,Feng Gao,Shucai Xu. Cooperative Control of Vehicle Lateral and Longitudinal Stability Based on Dynamic Stability Region [J]. Automotive Engineering, 2022, 44(6): 900-908. |
| [5] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |
| [6] | Chen Long, Xie Yunpeng, Cai Yingfeng, Sun Xiaoqiang, Teng Chenglong, Zou Kai. Stable Tracking Control of Autonomous Vehicles at Extreme Conditions [J]. Automotive Engineering, 2020, 42(8): 1016-1026. |
| [7] | Shi Qiujun, Li Jing, Liu Peng. Research on ESC Adaptive Sliding Mode Control for CommercialVehicles Based on Nonlinear Disturbance Observation [J]. Automotive Engineering, 2020, 42(6): 801-807. |
| [8] | Li Shaosong, Guo Konghui, Qiu Tao, Chen Hong, Wang Guodong, Cui Gaojian. Stability Control of Vehicle with Active Front Steering Under Extreme Conditions [J]. Automotive Engineering, 2020, 42(2): 191-198. |
| [9] | Zhang Lei, Zhao Xianhua, Wang Zhenpo. Study on Coordinated Control of Trajectory Tracking and Yaw Stability for Autonomous Four-wheel-independent-driving Electric Vehicles [J]. Automotive Engineering, 2020, 42(11): 1513-1521. |
|
||