Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (8): 1559-1572.doi: 10.19562/j.chinasae.qcgc.2025.08.012
Yi Chen,Xiangyu He( ),Xiliang Zhou,Houlu Fan,Zhuoyu Wu
),Xiliang Zhou,Houlu Fan,Zhuoyu Wu
Received:2024-10-29
Revised:2025-01-07
Online:2025-08-25
Published:2025-08-18
Contact:
Xiangyu He
E-mail:hexiangyu@csust.edu.cn
Yi Chen,Xiangyu He,Xiliang Zhou,Houlu Fan,Zhuoyu Wu. Design and Path Tracking Method of Electrohydraulic All-Wheel Steering Systems for Four-Axle Heavy-Duty Unmanned Vehicles[J].Automotive Engineering, 2025, 47(8): 1559-1572.
"
"
"
| 参数符号 | 参数名称 | 数值 | 单位 |
|---|---|---|---|
| 整机质量 | 20 560 | ||
| 轮胎宽度 | 375 | ||
| 轮胎滚动半径 | 510 | ||
| 绕z轴转动惯量 | 400 000 | ||
| 第1轴侧偏刚度 | -420 000 | ||
| 第2轴侧偏刚度 | -420 000 | ||
| 第3轴侧偏刚度 | -450 000 | ||
| 第4轴侧偏刚度 | -450 000 | ||
| 质心高度 | 1 175 | ||
| 质心到第1轴的距离 | 4 600 | ||
| 质心到第2轴的距离 | 2 950 | ||
| 质心到第3轴的距离 | 3 050 | ||
| 质心到第4轴的距离 | 4 700 | ||
| 第1轴到第2轴的距离 | 1 650 | ||
| 第2轴到第3轴的距离 | 6 000 | ||
| 第3轴到第4轴的距离 | 1 650 |
"
"
"
"

"
| 参数符号 | 参数名称 | 数值 | 单位 |
|---|---|---|---|
| 轮距 | 2 334 | ||
| 左右液压缸与车桥轴连接宽度 | 350 | ||
| 液压缸与车桥轴连接高度 | 200 | ||
| 左右转向力臂间距 | 1 676 | ||
| 转向力臂高度 | 250 | ||
| 液压缸位于中位长度 | 665 |
"
"
"
"
| 参数符号 | 参数名称 | 数值 | 单位 |
|---|---|---|---|
| 双杆液压缸缸径 | 80 | ||
| 双杆液压缸活塞杆径 | 50 | ||
| 双杆液压缸行程 | |||
| 液压泵排量 | 39 | ||
| 液压泵转速 | 2 000 | r/min | |
| 蓄能器充气压力 | 12.5 | ||
| 蓄能器公称容积 | 10 | ||
| 蓄能器额定压力 | 33 | ||
| 溢流阀开口压力 | 25 | ||
| 质量模块 | 1 060 | ||
| 机械弹簧的弹簧刚度 | |||
| 阻尼器的阻尼率 | 30 000 | ||
| 线性弹簧的弹簧刚度 |
"
"
"
"
"
"
"
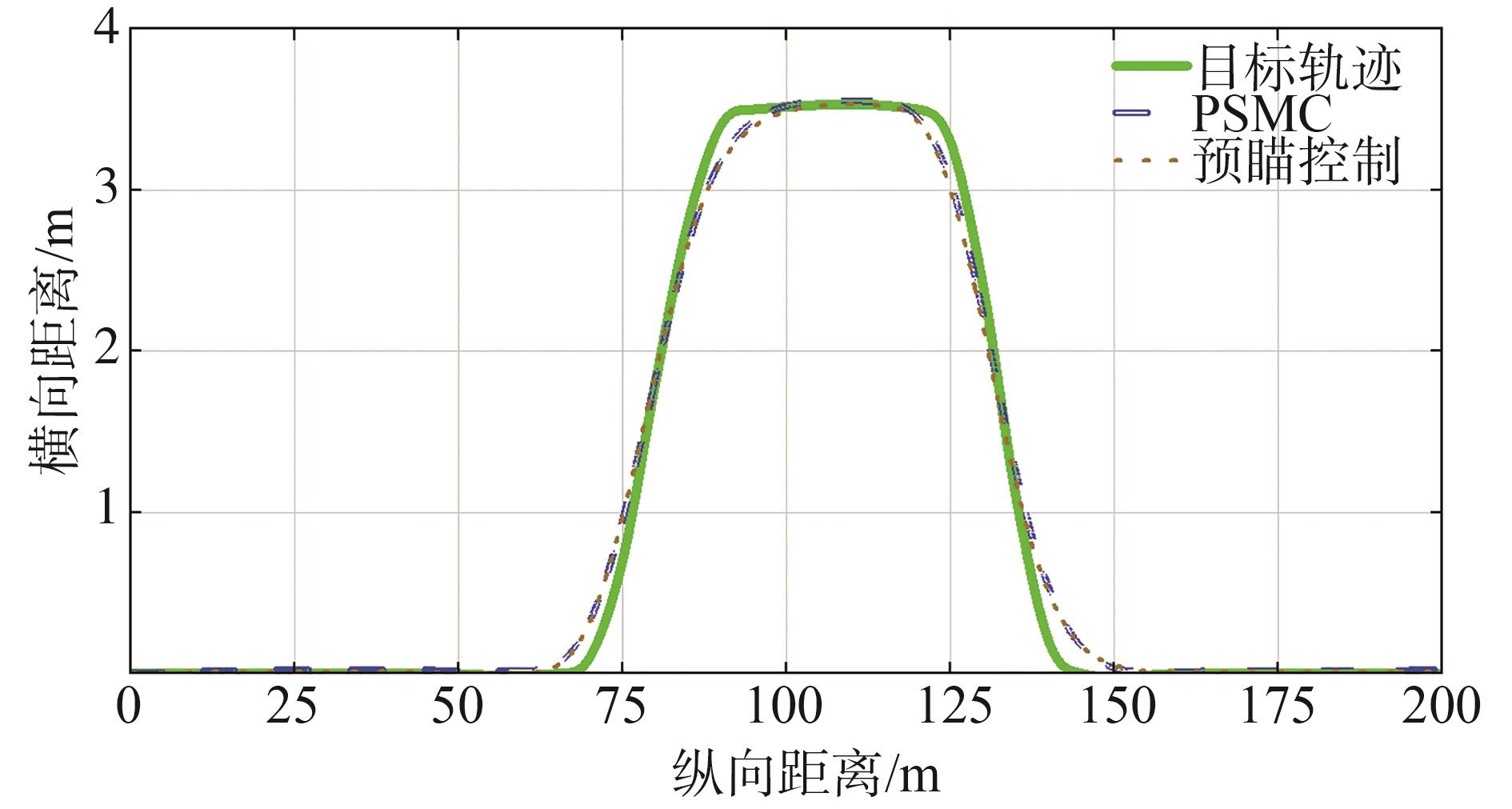
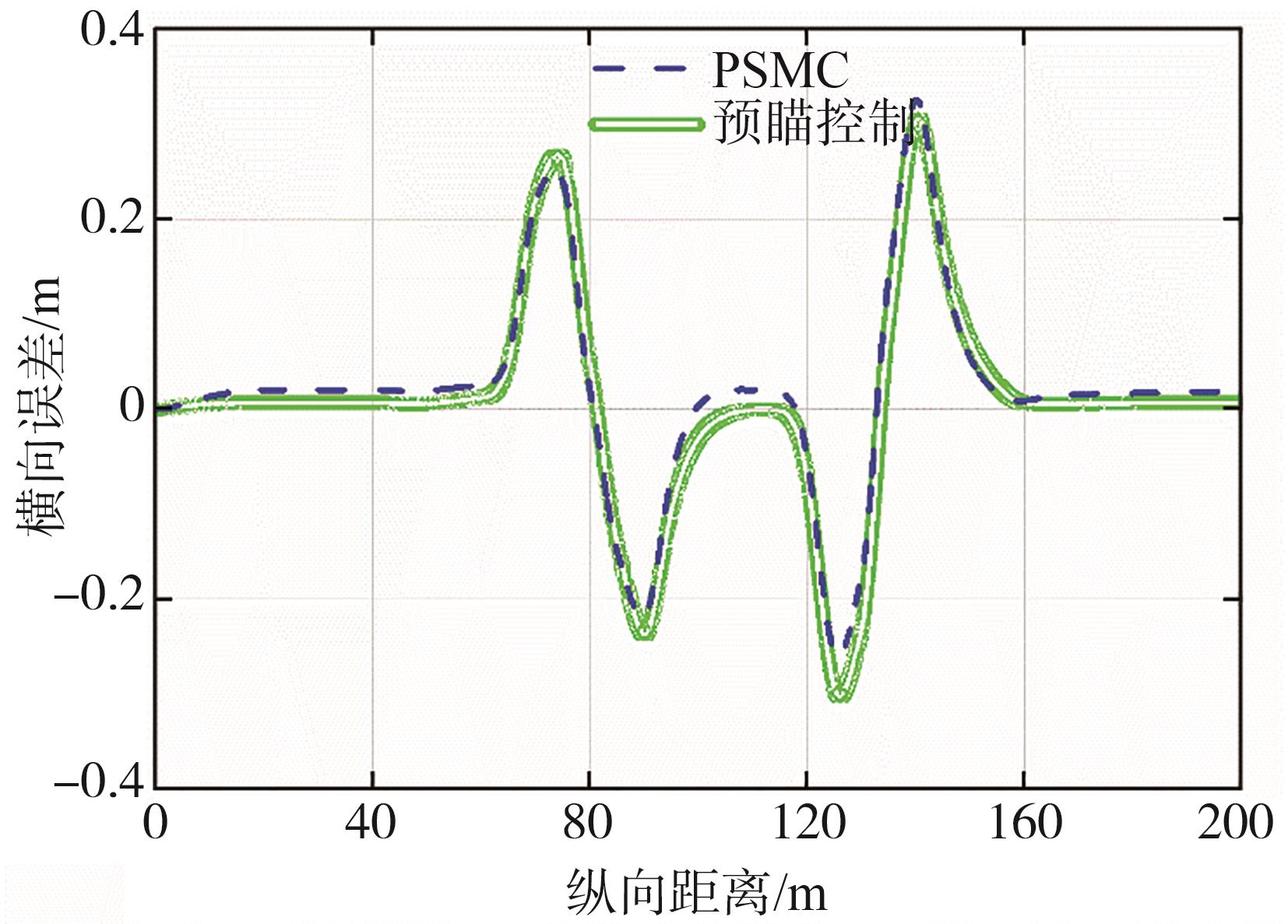
| 道路名称 | PSMC | 预瞄控制 | 性能提升 |
|---|---|---|---|
| Double lane change | 0.107 4 | 0.011 86 | |
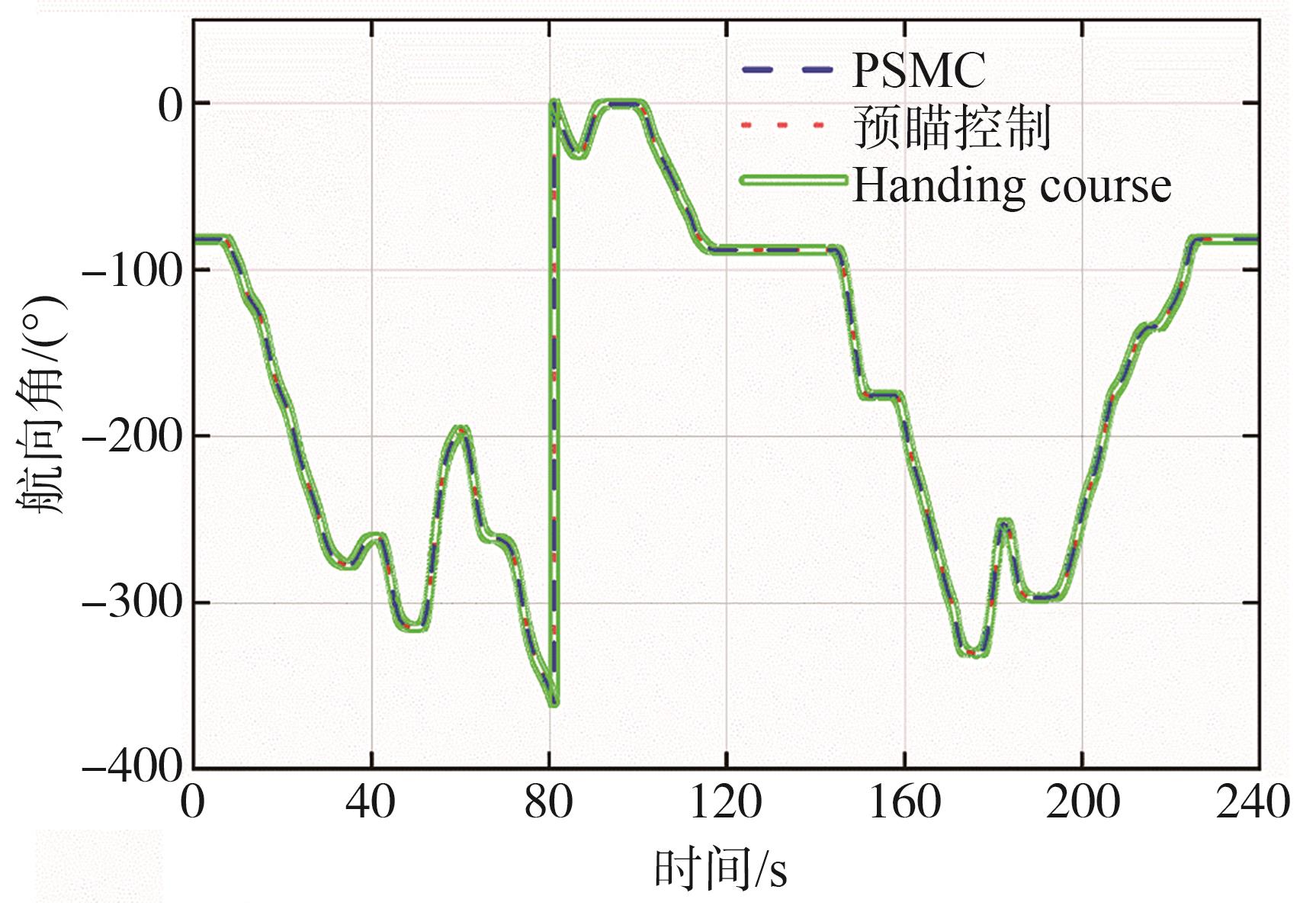
| Handing course | 0.017 05 | 0.031 38 |
"
"
"
| 参数名称 | PSMC | 预瞄控制 | 优化结果 |
|---|---|---|---|
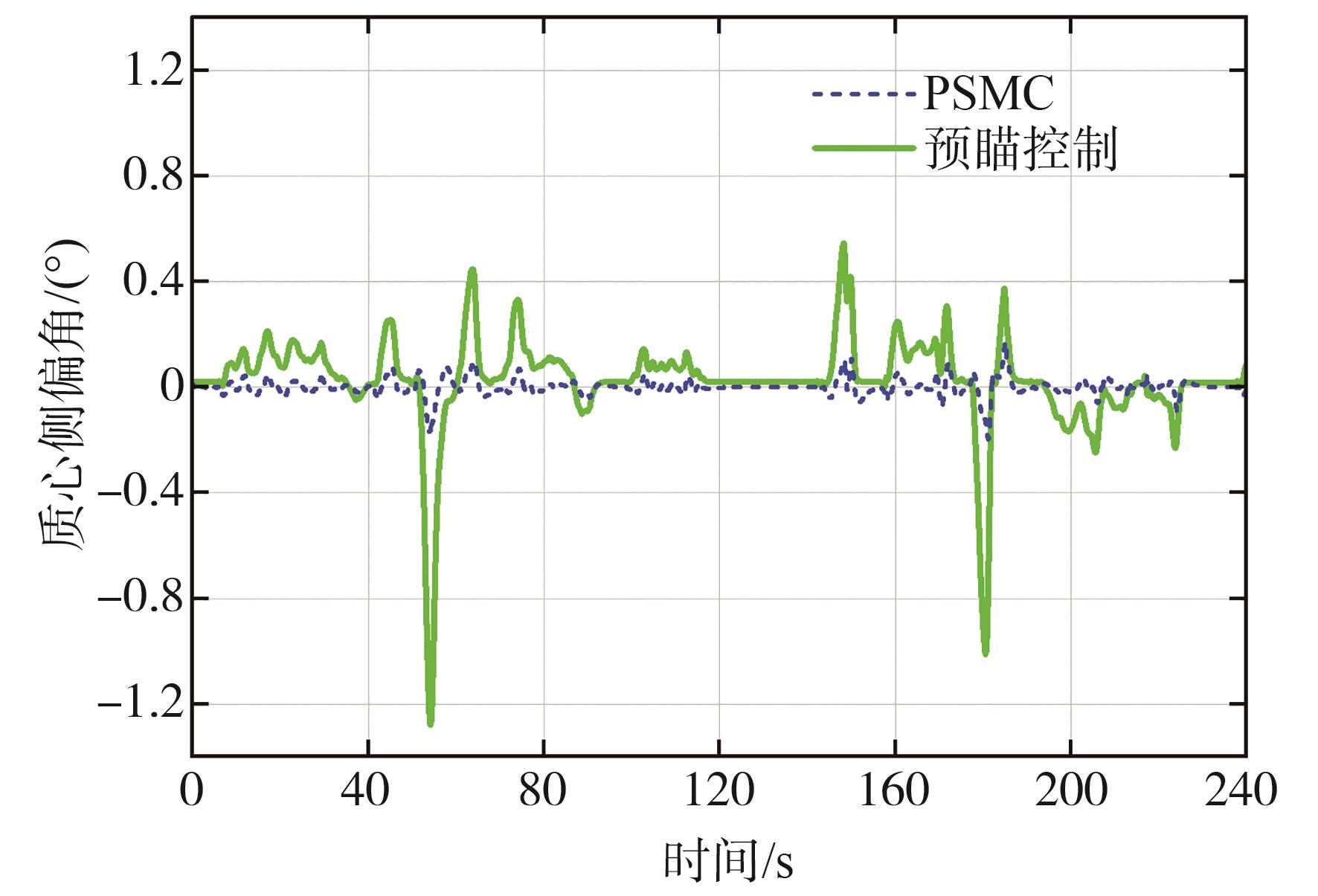
| 最大质心侧偏角 | |||
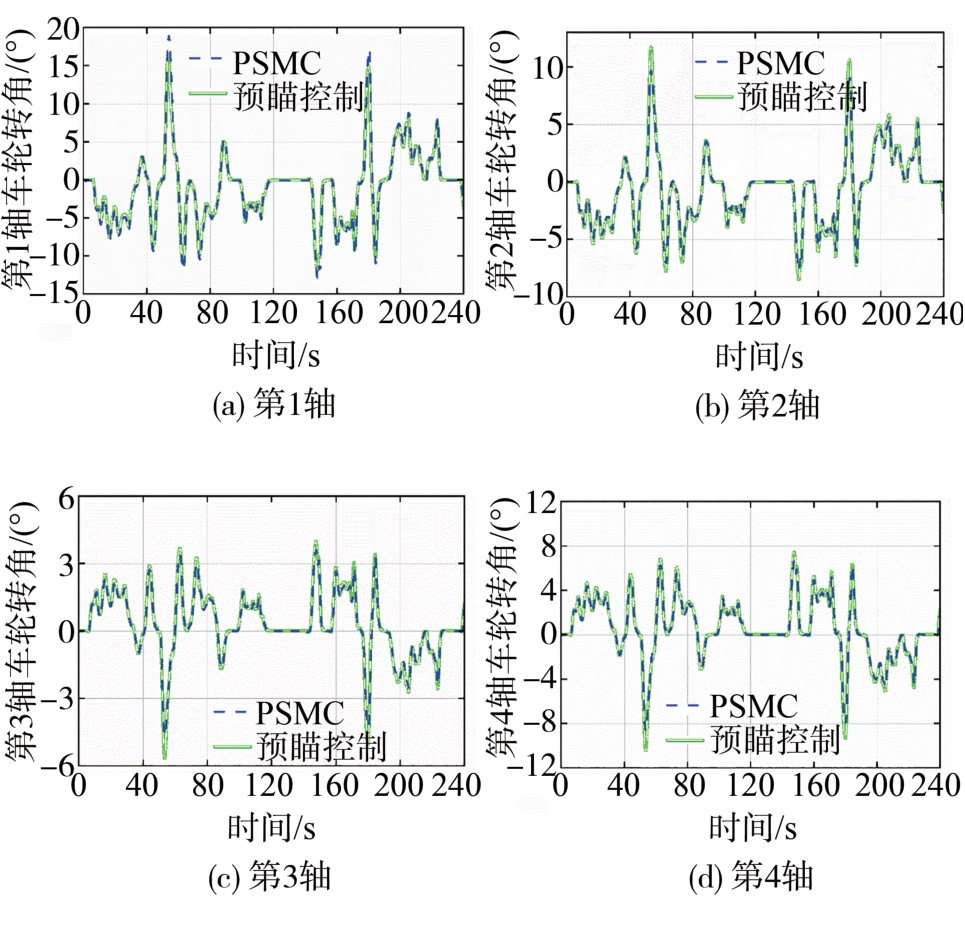
| 第2轴最大转角 | |||
| 第3轴最大转角 | |||
| 第4轴最大转角 |
"
"


"
"
"
"
"
"
"
| 参数名称 | PSMC | 预瞄控制 | 优化结果 |
|---|---|---|---|
| 最大质心侧偏角 | |||
| 第2轴最大转角 | |||
| 第3轴最大转角 | |||
| 第4轴最大转角 |
"
"
"

"
"
"
"
"

"
"
| [1] | XU F, ZHOU C, LIU X, et al. GRNN inverse system based decoupling control strategy for active front steering and hydro-pneumatic suspension systems of emergency rescue vehicle [J]. Mechanical Systems and Signal Processing, 2022, 167: 108595. |
| [2] | LIU M, HUANG J, CAO M. Handling stability improvement for a four-axle hybrid electric ground vehicle driven by in-wheel motors [J]. IEEE Access, 2017, 6: 2668-2682. |
| [3] | PAVLENKO O, DUN S, KHARKOV O, et al. Analysis of the stress state of the 4-axle dump truck lifting mechanism hydraulic cylinder support [J]. Transportation Research Procedia, 2022, 63: 347-359. |
| [4] | TANG G, TANG C, CLARAMUNT C, et al. Geometric a-star algorithm: an improved a-star algorithm for AGV path planning in a port environment [J]. IEEE Access, 2021, 9: 59196-59210. |
| [5] | WANG Y, ZHAO X, LI S, et al. Path tracking of eight in-wheel-driving autonomous vehicle: controller design and experimental results[C]. 2019 IEEE International Conference on Unmanned Systems (ICUS). IEEE, 2019: 672-677. |
| [6] | LU S, JIANG Y, XU X, et al. Adaptive heading control strategy for unmanned ground vehicle with variable wheelbase based on robust-active disturbance rejection control [J]. Control Engineering Practice, 2024, 142: 105786. |
| [7] | ZHANG S, SHEN A, LUO X, et al. The path following of intelligent unmanned vehicle scheme based on adaptive sliding mode-model predictive control [J]. Journal of the Franklin Institute, 2023, 360(8): 5658-5688. |
| [8] | ZHANG Y, HUANG Y, WANG H, et al. A comparative study of equivalent modelling for multi-axle vehicle [J]. Vehicle System Dynamics, 2018, 56(3): 443-460. |
| [9] | DU H, WANG L, CHEN J, et al. Integral sliding-mode tracking control for heavy vehicle electrohydraulic power steering system [J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3): 1455-1466. |
| [10] | ZHANG Z, DU H, CHEN S, et al. A novel electro-hydraulic servo steering system for ackermann steering of heavy multi-axle vehicle [J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(12): 2610-2624. |
| [11] | WANG Y, LIU X, REN Z, et al. Synchronized path planning and tracking for front and rear axles in articulated wheel loaders [J]. Automation in Construction, 2024, 165: 105538. |
| [12] | TOPAÇ M, TANRIVERDI A, ÇOLAK O, et al. Analysis of the failure modes and design improvement of an eccentrically loaded connecting rod for a double front axle steering linkage prototype [J]. Engineering Failure Analysis, 2021, 122: 105204. |
| [13] | ZHANG Y, NI J, TIAN H, et al. Integrated robust dynamics control of all-wheel-independently-actuated unmanned ground vehicle in diagonal steering [J]. Mechanical Systems and Signal Processing, 2022, 164: 108263. |
| [14] | LI W, YANG F, MAO E, et al. Design and verification of crab steering system for high clearance self-propelled sprayer [J]. 2022, 12(11): 1893. |
| [15] | JIANG Y, MENG H, CHEN G, et al. Differential-steering based path tracking control and energy-saving torque distribution strategy of 6WID unmanned ground vehicle [J]. Energy, 2022, 254: 124209. |
| [16] | XU T, LIU X, LI Z, et al. A sliding mode control scheme for steering flexibility and stability in all-wheel-steering multi-axle vehicles [J]. International Journal of Control, Automation and Systems, 2023, 21(6): 1926-1938. |
| [17] | AHISKA K, OZGOREN M K, LEBLEBICIOGLU M K. Energy and time optimal autopilot for electric vehicles performing ackerman cornering [J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 17258-17270. |
| [18] | CAO D, TANG B, JIANG H, et al. Study on low-speed steering resistance torque of vehicles considering friction between tire and pavement [J]. Applied Sciences, 2019, 9(5): 1015. |
| [19] | 朱先民, 宋健. 基于LuGre模型的商用车原地转向阻力矩 [J]. 清华大学学报(自然科学版), 2019, 59(7): 575-579. |
| ZHU Xianmin, SONG Jian. LuGre model for the steering resistance torque of stationary commercial trucks[J]. Journal of Tsinghua University (Science and Technology), 2019, 59(7): 575-579. | |
| [20] | 叶小华, 岑豫皖, 赵韩,等. 基于液压弹簧刚度的阀控非对称缸建模仿真 [J]. 中国机械工程, 2011, 22(1): 23-27. |
| [1] | Zhihong Wang,Jiarong Zeng,Jie Hu,Zhiling Zhang,Donghao Yang,Yuefeng Ji. Path Tracking Control of Light Commercial Vehicles Based on P-PP [J]. Automotive Engineering, 2025, 47(4): 669-679. |
| [2] | Jie Hu,Zhiling Zhang,Jiefeng Zhong,Wenlong Zhao,Jiachen Zheng,Silong Zhou,Zijun Qu. A Hybrid Control Strategy for Light Commercial Vehicle Path Tracking Considering Complex Disturbances [J]. Automotive Engineering, 2024, 46(9): 1576-1586. |
| [3] | Fuwu Yan,Bowen Xiang,Jie Hu,Ruipeng Chen,Zhihao Zhang,Haoyan Liu,Chongzhi Gao. Lateral Control of Autonomous Light Truck Based on Improved LPV Model [J]. Automotive Engineering, 2024, 46(8): 1403-1413. |
| [4] | Mo Han,Hongwen He,Man Shi,Wei Liu,Jianfei Cao,Jingda Wu. Research on Learning-Based Model Predictive Path Tracking Control for Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(7): 1197-1207. |
| [5] | Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control [J]. Automotive Engineering, 2024, 46(10): 1804-1815. |
| [6] | Yougang Bian,Tiantian Zhang,Heping Xie,Hongmao Qin,Zeyu Yang. Anti-disturbance and Anti-corner-cutting Control for Collaborative Path Tracking of Vehicle Platoon [J]. Automotive Engineering, 2023, 45(8): 1320-1332. |
| [7] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [8] | Jie Hu,Ruipeng Chen,Zhihao Zhang,Bowen Xiang,Haoyan Liu,Qi Zhu,Qixiang Guo. Path Tracking Control of Autonomous Truck Based on RMPC [J]. Automotive Engineering, 2023, 45(11): 2092-2103. |
| [9] | Jun Li,Wenxing Wan,Sanqiang Hao,Wu Qin,Feifei Liu. Research on Model Predictive Control of Autonomous Vehicle Path Tracking Under Complex Road Condition [J]. Automotive Engineering, 2022, 44(5): 664-674. |
| [10] | Longxin Guan,Zufei Gu,Chao Zhang,Aichun Wang,Chenruo Peng,Huihua Jiang,Xiaojian Wu. Model Predictive Path Following Control of Intelligent Vehicles Considering System Complex Disturbances [J]. Automotive Engineering, 2022, 44(12): 1844-1855. |
| [11] | Weichen Wang,Junqiu Li,Fengchun Sun,Jian Song,Yonghua Wu. Path Tracking Strategy for All-Wheel Steering of Multi-axle Heavy-Duty Vehicles Based on Tube MPC [J]. Automotive Engineering, 2022, 44(11): 1665-1675. |
| [12] | Jie Hu,Xinkai Zhong,Ruinan Chen,Linglei Zhu,Wencai Xu,Minchao Zhang. Path Tracking Control of Intelligent Vehicles Based on Fuzzy LQR [J]. Automotive Engineering, 2022, 44(1): 17-25. |
| [13] | Sixu Li,Biao Xu,Manjiang Hu,Yougang Bian,Xiaolong Sun Ning Chen. A Dynamic Model Predictive Control Approach for Multipoint Preview Path Tracking of Articulated Vehicles [J]. Automotive Engineering, 2021, 43(8): 1187-1194. |
| [14] | Qiang Gao,Zhou Lu,Chendong Duan,Ting Xu. Research on Vehicle Vertical Parking Path Planning and Path Tracking [J]. Automotive Engineering, 2021, 43(7): 987-994. |
| [15] | Lisheng Jin,Xianyi Xie,Fa Si,Baicang Guo,Jian Shi. Intelligent Driving Path Tracking Algorithm Considering Driver Characteristics [J]. Automotive Engineering, 2021, 43(4): 553-561. |
|
||