Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (12): 2290-2302.doi: 10.19562/j.chinasae.qcgc.2024.12.015
Previous Articles Next Articles
Qin Zhu1,2,Shenyang Han2,Mingru Zeng2( ),Pinghong Lai3,Chuimao Wu2,Weiyi Hu2
),Pinghong Lai3,Chuimao Wu2,Weiyi Hu2
Received:2024-04-26
Revised:2024-06-12
Online:2024-12-25
Published:2024-12-20
Contact:
Mingru Zeng
E-mail:zeng_mr@163.com
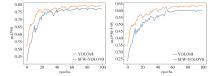
Qin Zhu,Shenyang Han,Mingru Zeng,Pinghong Lai,Chuimao Wu,Weiyi Hu. SFW-YOLOv8 Complex Scene Video Vehicle Detection Model[J].Automotive Engineering, 2024, 46(12): 2290-2302.

"


"


"


"


"


"


"

"
"


"
"
| 实验环境 | 环境配置 |
|---|---|
| 操作系统 | Ubuntu |
| GPU | NVIDIA GeForce RTX 2080 Ti |
| 显存 | 12 GB |
| 编程语言 | Python3.7 |
| 深度学习框架 | PyTorch1.8.0 |
"
"
| 方法 | mAP50/% | mAP50:5:95/% | 推理速度/(ms·帧-1) |
|---|---|---|---|
| YOLOv8 | 77.4 | 60.3 | 9.3 |
| +convGRU[ | 77.8 | 61.3 | 9.8 |
| +SF-Module | 78.2 | 62.4 | 10.9 |
"
| 方法 | SF-Module | WIoU | mAP50/% | mAP50:5:95/% | 推理速度/(ms·帧-1) |
|---|---|---|---|---|---|
| YOLOv8 | 77.4 | 60.3 | 9.3 | ||
| A | √ | 78.2 | 62.5 | 10.9 | |
| B | √ | 78.4 | 61.8 | 9.4 | |
| C | √ | √ | 79.5 | 63.6 | 11.2 |
"
| 方法 | mAP50/% | mAP50:5:95/% | 推理速度/(ms·帧-1) |
|---|---|---|---|
| Faster R-CNN[ | 67.1 | 50.1 | 88.5 |
| SSD[ | 70.2 | 51.8 | 53.8 |
| RetinaNet[ | 72.4 | 53.1 | 50.4 |
| YOLOv5 | 76.3 | 58.1 | 11.3 |
| YOLOX[ | 75.9 | 56.9 | 15.5 |
| YOLOv7[ | 76.7 | 58.4 | 10.4 |
| YOLOv8 | 77.4 | 60.3 | 9.3 |
| SFW-YOLOv8 | 79.5 | 63.6 | 11.2 |
"
| 方法 | mAP50/% | mAP50:5:95/% | 推理速度/(ms·帧-1) |
|---|---|---|---|
| YOLOv8 | 76.5 | 59.2 | 10.3 |
| SFW-YOLOv8 | 77.6 | 61.1 | 11.9 |
"

| 1 | TSAI D,LAI S.Independent component analysis-based background subtraction for indoor surveillance[J].IEEE Transactions on Image Processing, 2009, 18(1): 158-167. |
| 2 | LEE D S.Effective gaussian mixture learning for video background subtraction[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(5): 827-832. |
| 3 | HORN B K P, SCHUNCK B G. Determining optical flow[J].Artificial Intelligence, 1981, 17(1/3): 185-203. |
| 4 | XU Z H, HUANG W Q, WANG W. Multi-category vehicle detection in surveillance video based on deep learning[J]. Journal of Computer Applications, 2019, 39(3): 700-705. |
| 5 | 江屾. 基于改进YOLOv5的车辆检测及跟踪方法研究[D]. 重庆:重庆交通大学,2023. |
| JIANG Shen. Research on vehicle detection and tracking methods based on improved YOLOv5 [D]. Chongqing: Chongqing Jiaotong University,2023. | |
| 6 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]. Computer Vision and Pattern Recognition. USA: IEEE, 2014: 580-587. |
| 7 | HE K, ZHANG X, REN S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015,37(9): 1904-1916. |
| 8 | GIRSHICK R. Fast R-CNN[C]. Proceedings of IEEE International Conference on Computer Vision, USA: IEEE, 2015: 1440-1448. |
| 9 | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2017, 39(6): 1137-1149. |
| 10 | HE K, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]. Proceedings of the IEEE International Conference on Computer Vision, 2017: 2961-2969. |
| 11 | FAN Q, BROWN L, SMITH J. A closer look at faster R-CNN for vehicle detection[C]. 2016 IEEE intelligent vehicles symposium (IV). IEEE, 2016: 124-129. |
| 12 | XU Y, YU G, WANG Y, et al. Car detection from low-altitude UAV imagery with the faster R-CNN[J]. Journal of Advanced Transportation, 2017, 2017. |
| 13 | 朱茂桃,张鸿翔,方瑞华. 基于RCNN的车辆检测方法研究[J]. 机电工程,2018,35(8):880-885. |
| ZHU Maotao, ZHANG Hongxiang, FANG Ruihua. Research on vehicle detection method based on RCNN [J]. Mechanical and Electrical Engineering,2018,35(8):880-885. | |
| 14 | HSU S C, HUANG C L, CHUANG C H. Vehicle detection using simplified fast R-CNN[C]. 2018 International Workshop on Advanced Image Technology (IWAIT). IEEE, 2018: 1-3. |
| 15 | 陈玉敏,李淼,房晓丽. 基于时空融合加速的Fast RCNN运动车辆检测算法[J]. 电子测量技术,2020,43(3):139-145. |
| CHEN Yumin, LI Miao, FANG Xiaoli. Fast RCNN moving vehicle detection algorithm based on spatiotemporal fusion acceleration [J]. Electronic Measurement Technology, 2019,43(3):139-145. | |
| 16 | 李松江,吴宁,王鹏,等. 基于改进Cascade RCNN的车辆目标检测方法[J]. 计算机工程与应用,2021,57(5):123-130. |
| LI Songjiang, WU Ning, WANG Peng, et al. Vehicle target detection method based on improved cascade RCNN [J]. Computer Engineering and Applications, 2019,57(5):123-130. | |
| 17 | 柳杰,金积德,郑庆祥. 基于改进Mask RCNN的夜间车辆检测方法[J]. 交通信息与安全,2023,41(2):59-66. |
| LIU Jie, JIN Jide, ZHENG Qingxiang. Vehicle detection method at night based on improved mask RCNN [J]. Traffic Information and Safety, 2019,41(2):59-66. | |
| 18 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition,2016: 779-788. |
| 19 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector[C]. European Conference on Computer Vision. Springer, Cham, 2016: 21-37. |
| 20 | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2017, PP(99): 2999-3007. |
| 21 | REDMON J, FARHADI A. YOLO9000: better, faster, stronger[C]. IEEE Conference on Computer Vision & Pattern Recognition. IEEE, 2017: 6517-6525. |
| 22 | REDMON J, FARHADI A. YOLOv3: an incremental improvement[J]. arXiv e-prints, 2018. |
| 23 | BOCHKOVSKIY A, WANG C Y, LIAO H. YOLOV4: optimal speed and accuracy of object detection[J]. arXiv preprint arXiv: , 2020. |
| 24 | GE Z, LIU S, WANG F, et al. YOLOX: exceeding YOLO series in 2021[J]. arXiv preprint arXiv: , 2021. |
| 25 | LI C, LI L, JIANG H, et al. YOLOv6: a single-stage object detection framework for industrial applications[J]. arXiv preprint arXiv:, 2022. |
| 26 | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 7464-7475. |
| 27 | CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with transformers[C]. European Conference on Computer Vision, 2020: 213-229. |
| 28 | 李珣,刘瑶,李鹏飞,等. 基于Darknet框架下YOLO v2算法的车辆多目标检测方法[J]. 交通运输工程学报,2018,18(6):142-158. |
| LI Xun, LIU Yao, LI Pengfei, et al. Vehicle multi-target detection method based on YOLOv2 algorithm in darknet framework [J]. Journal of Traffic and Transportation Engineering,2018,18(6):142-158. | |
| 29 | CHEN S, LIN W. Embedded system real-time vehicle detection based on improved YOLO network[C]. 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC). IEEE, 2019: 1400-1403. |
| 30 | 徐浩,杨德刚,蒋倩倩,等. 基于SSD的轻量级车辆检测网络改进[J]. 计算机工程与应用,2022,58(12):209-217. |
| XU Hao, YANG Degang, JIANG Qianqian, et al. Improvement of lightweight vehicle detection network based on SSD [J]. Computer Engineering and Applications,2022,58(12):209-217. | |
| 31 | ZHANG Y, GUO Z, WU J, et al. Real-time vehicle detection based on improved YOLOv5[J]. Sustainability, 2022, 14(19): 12274. |
| 32 | 蔡刘畅,杨培峰,张秋仪. 基于YOLOv7的道路监控车辆检测方法[J]. 陕西科技大学学报,2023,41(6):155-161,175. |
| WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023: 7464-7475. | |
| 33 | 许晓阳,高重阳. 改进YOLOv7-tiny的轻量级红外车辆目标检测算法[J]. 计算机工程与应用,2024,60(1):74-83. |
| XU Xiaoyang, GAO Chongyang. Improved lightweight infrared vehicle target detection algorithm based on YOLOv7-tiny [J]. Computer Engineering and Applications, 2024,60(1):74-83. | |
| 34 | 周飞,郭杜杜,王洋,等. 基于改进YOLOv8的交通监控车辆检测算法[J]. 计算机工程与应用,2024,60(6):110-120. |
| ZHOU Fei, GUO Dudu, WANG Yang, et al. Vehicle detection algorithm for traffic monitoring based on improved YOLOv8 [J]. Computer Engineering and Applications, 2024,60(6):110-120. | |
| 35 | KANG K, OUYANG W L, LI H S, et al. Object detection from video tubelets with convolutional neural networks[C]. Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, 2016: 817-825. |
| 36 | FEICHTENHOFER C, PINZ A, ZISSERMAN A. Detect to track and track to detect[C]. Proceedings of the 2017 IEEE International Conference on Computer Vision, 2017: 3057-3065. |
| 37 | XIAO F Y, LEE Y J. Video object detection with an aligned spatial-temporal memory[C]. Proceedings of the 15th European Conference on Computer Vision, 2018: 494-510. |
| 38 | GONG T, CHEN K, WANG X,et al. Temporal RoI align for video object recognition[J]. arXiv:,2021. |
| 39 | 程稳,陈忠碧,李庆庆,等. 时空特征对齐的多目标跟踪算法[J]. 光电工程,2023,50(6):66-79. |
| CHENG Wen, CHEN Zhongbi, LI Qingqing, et al. Multi-target tracking algorithm with spatiotemporal feature alignment [J]. Opto-electronic Engineering,2023,50(6):66-79. | |
| 40 | WEN L, DU D, CAI Z, et al. UA-DETRAC: a new benchmark and protocol for multi-object detection and tracking[J]. Computer Vision and Image Understanding, 2020, 193: 102907. |
| 41 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| 42 | ZHANG H, WANG Y, DAYOUB F, et al. Varifocalnet: an iou-aware dense object detector[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 8514-8523. |
| 43 | LI X, WANG W, WU L, et al. Generalized focal loss: learning qualified and distributed bounding boxes for dense object detection[J]. Advances in Neural Information Processing Systems, 2020, 33: 21002-21012. |
| 44 | TONG Z, CHEN Y, XU Z, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism[J]. arXiv preprint arXiv:, 2023. |
| [1] | Yutao Luo,Fengrui Guo. Cockpit Facial Expression Recognition Model Based on Attention Fusion and Feature Enhancement Network [J]. Automotive Engineering, 2024, 46(9): 1697-1706. |
| [2] | Yiwei Zhou,Mo Xia,Bing Zhu. Multimodal Vehicle Trajectory Prediction Methods Considering Multiple Traffic Participants in Urban Road Scenarios [J]. Automotive Engineering, 2024, 46(3): 396-406. |
| [3] | Jian Zhao,Wenxu Li,Bing Zhu,Peixing Zhang,Rui Tang,Jiasheng Li. A Modeling Method for Traffic Vehicle with Variable Car Following Characteristic for Intelligent Driving System Testing [J]. Automotive Engineering, 2024, 46(11): 1952-1961. |
| [4] | Jie Hu,Lin Chen,Zhihong Wang,Haihua Qing,Haojie Wang. Transformer-Based Prediction of Charging Time for Pure Electric Vehicles [J]. Automotive Engineering, 2024, 46(11): 2059-2067. |
| [5] | Yongtao Li,Chenxu Sun,Weiguang Zheng,Enyong Xu,Yufang Li,Shanchao Wang. Collision Warning Based on Fusion of Millimeter Wave Radar and Vision [J]. Automotive Engineering, 2023, 45(9): 1666-1676. |
| [6] | Xia Zhao,Zhao Li,Rui Fu,Zhenzhen Ge,Chang Wang. Real-Time Detection of Distracted Driving Behavior Based on Deep Convolution-Tokens Dimensionality Reduction Optimized Visual Transformer Model [J]. Automotive Engineering, 2023, 45(6): 974-988. |
| [7] | Linhui Li,Xinliang Zhang,Yifan Fu,Jing Lian,Jiaxu Ma. Research on Visible Light and Infrared Post-Fusion Detection Based on TC-YOLOv7 Algorithm [J]. Automotive Engineering, 2023, 45(12): 2280-2290. |
| [8] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [9] | Xiaojun Zhang,Jingzhe Xi,Yanlei Shi,Anlu Yuan. Lightweight YOLOv7-R Algorithm for Road-Side View Target Detection [J]. Automotive Engineering, 2023, 45(10): 1833-1844. |
| [10] | Hongrui Liu,Donghua Gu,Hairui Li,Bin Zhang,Jing Qian. A P-C-C-P Equalizer and Its Control Methods for Lithium-ion Batteries in Series [J]. Automotive Engineering, 2022, 44(3): 372-378. |
| [11] | Dafang Wang,Hai Shang,Jiang Cao,Tao Wang,Xiangteng Xia,Yulin Han. Semantic Segmentation Method of Point Cloud in Automatic Driving Scene Based on Self-attention Mechanism [J]. Automotive Engineering, 2022, 44(11): 1656-1664. |
| [12] | Jun Liu,Lanlei Li Hanbing Chen. A Real⁃time Detection Model for Multi⁃task Traffic Objects Based on Humanoid Vision [J]. Automotive Engineering, 2021, 43(1): 50-58. |
| [13] | Cai Yingfeng, Tai Kangsheng, Wang Hai, Li Yicheng, Chen Long. Research on Behavior Recognition Algorithm of Surrounding Vehicles for Driverless Car [J]. Automotive Engineering, 2020, 42(11): 1464-1472. |
|