| [1] |
LIANG D, GUO Y C, ZHANG S K, et al. Lane detection: a survey with new results[J]. Journal of Computer Science and Technology, 2020, 35: 493-505.
|
| [2] |
陈涛,张洪丹,陈东,等.基于优先像素与卡尔曼滤波追踪的车道线检测[J].汽车工程,2016,38(2):200-205,220.
|
|
CHEN T, ZHANG H D, CHEN D, et al. Lane detection based on prioritized pixel and Kalman filter tracking[J]. Automotive Engineering, 2016, 38(2): 200-205,220.
|
| [3] |
陈无畏, 蒋玉亭, 谈东奎. 一种基于边缘点投影的车道线快速识别算法[J]. 汽车工程, 2017, 39(3): 357-363.
|
|
CHEN W W, JIANG Y T, TAN D K. A fast lane line recognition algorithm based on edge point projection[J]. Automotive Engineering, 2017, 39(3): 357-363.
|
| [4] |
BOJARSKI M, DEL TESTA D, DWORAKOWSKI D, et al. End to end learning for self-driving cars[J]. arXiv preprint arXiv:, 2016.
|
| [5] |
杨淑琴, 马玉浩, 方铭宇, 等. 基于实例分割的复杂环境车道线检测方法[J]. 浙江大学学报 (工学版), 2022,56(4):809-815,832.
|
|
YANG S Q, MA Y H, FANG M Y, et al. Lane line detection in complex environments based on instance segmentation[J]. Journal of Zhejiang University (Engineering Edition), 2022,56(4):809-815,832.
|
| [6] |
武志斐, 李守彪. 基于实例分割的车道线检测算法[J]. 汽车工程, 2023, 45(2): 263-272.
|
|
WU Z F, LI S B. Lane line detection algorithm based on instance segmentation[J]. Automotive Engineering, 2023, 45(2): 263-272.
|
| [7] |
TABELINI L, BERRIEL R, PAIXAO T M, et al. Keep your eyes on the lane: real-time attention-guided lane detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 294-302.
|
| [8] |
FENG Z, GUO S, TAN X, et al. Rethinking efficient lane detection via curve modeling[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 17062-17070.
|
| [9] |
DU Y, ZHANG R, SHI P, et al. ST-LaneNet: lane line detection method based on swin transformer and LaneNet[J]. Chinese Journal of Mechanical Engineering, 2024, 37(1): 130-145.
|
| [10] |
PAN X, SHI J, LUO P, et al. Spatial as deep: spatial CNN for traffic scene understanding[C]. Proceedings of the AAAI Conference on Artificial Intelligence, 2018: 7276-7283.
|
| [11] |
NEVEN D, DE BRABANDERE B, GEORGOULIS S, et al. Towards end-to-end lane detection: an instance segmentation approach[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018: 286-291.
|
| [12] |
XU H, WANG S, CAI X, et al. CurveLane-NAS: unifying lane-sensitive architecture search and adaptive point blending[C]. Computer Vision-ECCV 2020: 16th European Conference, Glasgow, UK, August 23-28, 2020, Proceedings, Part XV 16. Springer International Publishing, 2020: 689-704.
|
| [13] |
CHE Q H, NGUYEN D P, PHAM M Q, et al. TwinLiteNet: an efficient and lightweight model for driveable area and lane segmentation in self-driving cars[C]. 2023 International Conference on Multimedia Analysis and Pattern Recognition (MAPR). IEEE, 2023: 1-6.
|
| [14] |
WANG J, WU Q M J, ZHANG N. You only look at once for real-time and generic multi-task[J]. IEEE Transactions on Vehicular Technology, 2024.
|
| [15] |
TABELINI L, BERRIEL R, PAIXAO T M, et al. PolyLaneNet: lane estimation via deep polynomial regression[C]. 2020 25th International Conference on Pattern Recognition (ICPR). IEEE, 2021: 6150-6156.
|
| [16] |
SU J, CHEN C, ZHANG K, et al. Structure guided lane detection[J]. arXiv preprint arXiv:, 2021.
|
| [17] |
ZHENG T, HUANG Y, LIU Y, et al. CLRNet: cross layer refinement network for lane detection[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022: 898-907.
|
| [18] |
LIU B, LING Q. Sparse LaneFormer: end-to-end lane detection with sparse proposals and interactions[J]. IEEE Transactions on Intelligent Transportation Systems, 2025.
|
| [19] |
BÄCKLUND H, HEDBLOM A, NEIJMAN N. A density-based spatial clustering of application with noise[J]. Data Mining TNM033, 2011, 33: 11-30.
|
| [20] |
LIANG J, ZHOU T, LIU D, et al. CLUSTSEG: clustering for universal segmentation[J]. arXiv preprint arXiv:, 2023.
|
| [21] |
NEUBECK A, VAN GOOL L. Efficient non-maximum suppression[C]. 18th International Conference on Pattern Recognition (ICPR'06). IEEE, 2006, 3: 850-855.
|
| [22] |
SHEPLEY A J, FALZON G, KWAN P, et al. Confluence: a robust non-IoU alternative to non-maxima suppression in object detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(10): 11561-11574.
|
| [23] |
ZHOU K Y. Lane2Seq: towards unified lane detection via sequence generation[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024: 16944-16953.
|
| [24] |
VAN GANSBEKE W, DE BRABANDERE B, NEVEN D, et al. End-to-end lane detection through differentiable least-squares fitting[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops, 2019:905-913.
|
| [25] |
YANG Z, SHEN C, SHAO W, et al. LDTR: transformer-based lane detection with anchor-chain representation[J]. Computational Visual Media, 2024, 10(4): 753-769.
|
| [26] |
BUERTEY E. Improved LaneNet for lane detection[D]. University of Waterloo, 2023.
|
| [27] |
HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778.
|
| [28] |
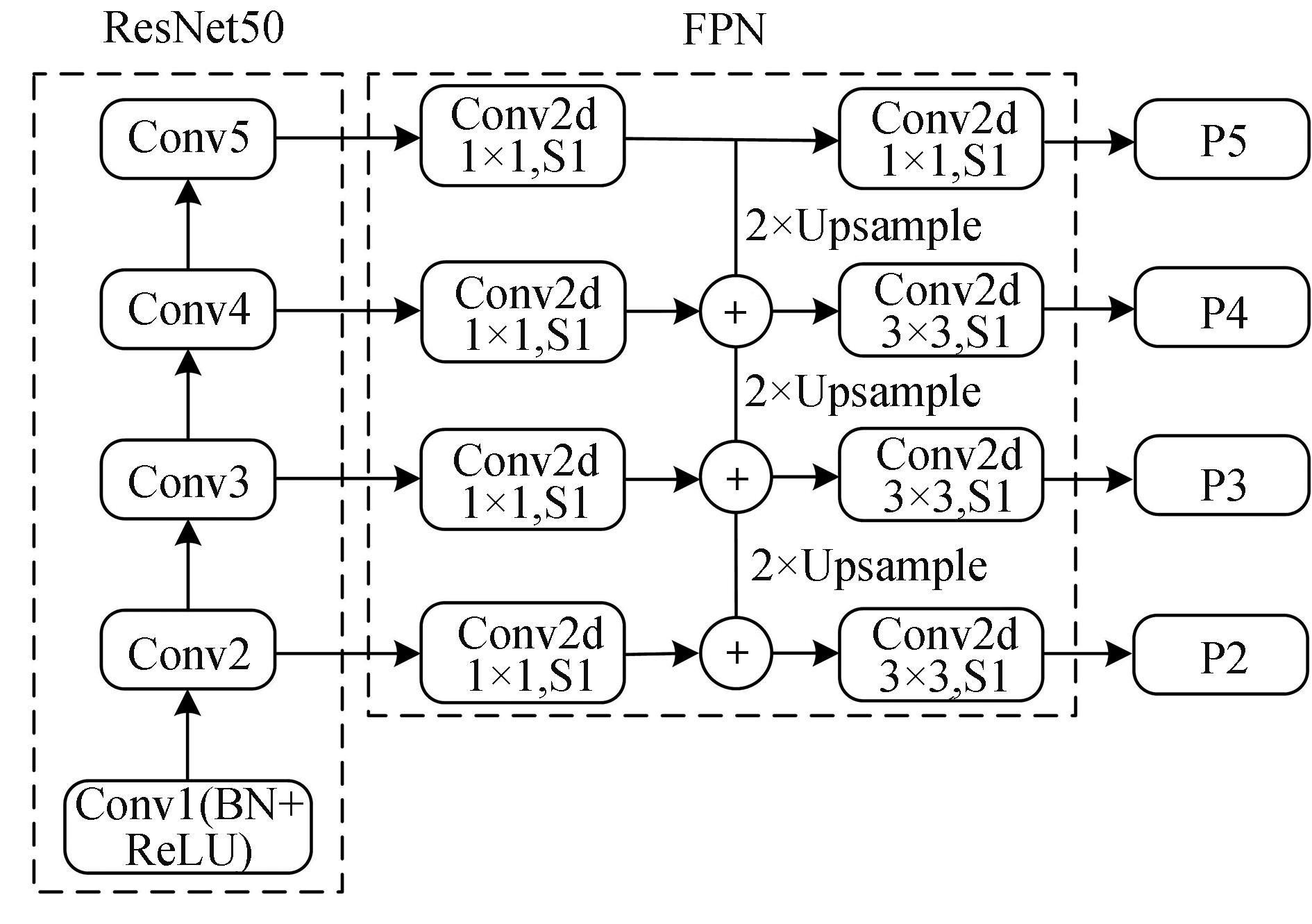
LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 2117-2125.
|
| [29] |
汪鹏飞, 沈庆宏, 张维利, 等. 基于多尺度特征图像分割的车道线提取方法[J]. 南京大学学报 (自然科学版), 2022, 58(2): 336-344.
|
|
WANG P F, SHEN Q H, ZHANG W L, et al. Lane extraction method based on multi-scale feature image segmentation [J]. Journal of Nanjing University (Natural Science Edition), 2022, 58(2): 336-344.
|
| [30] |
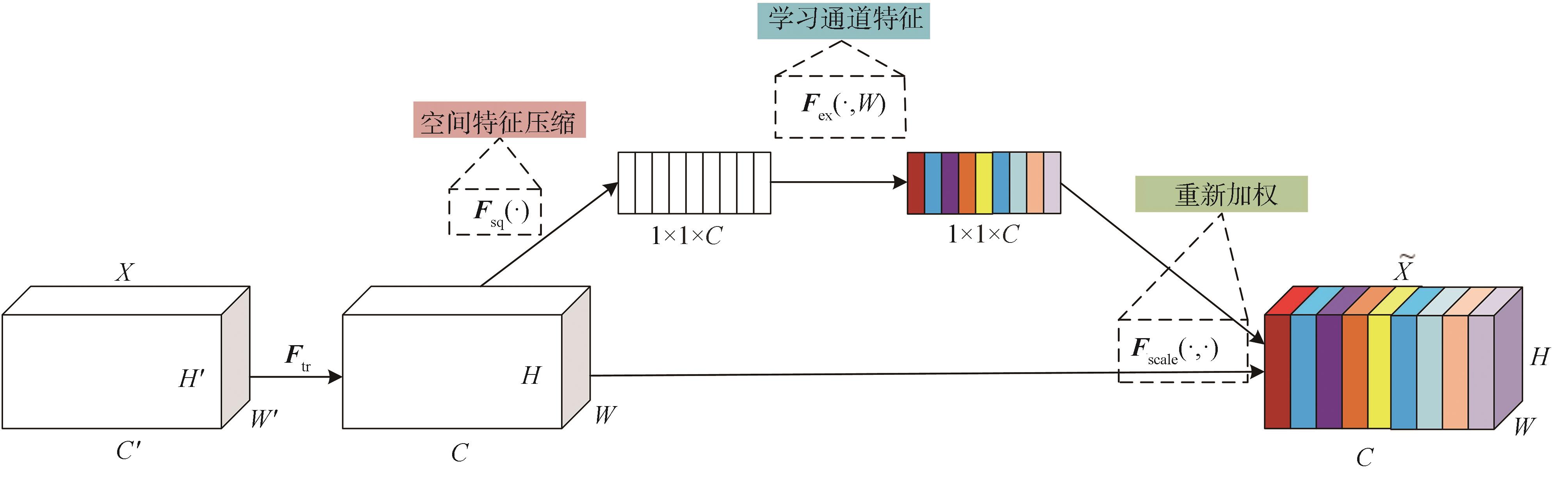
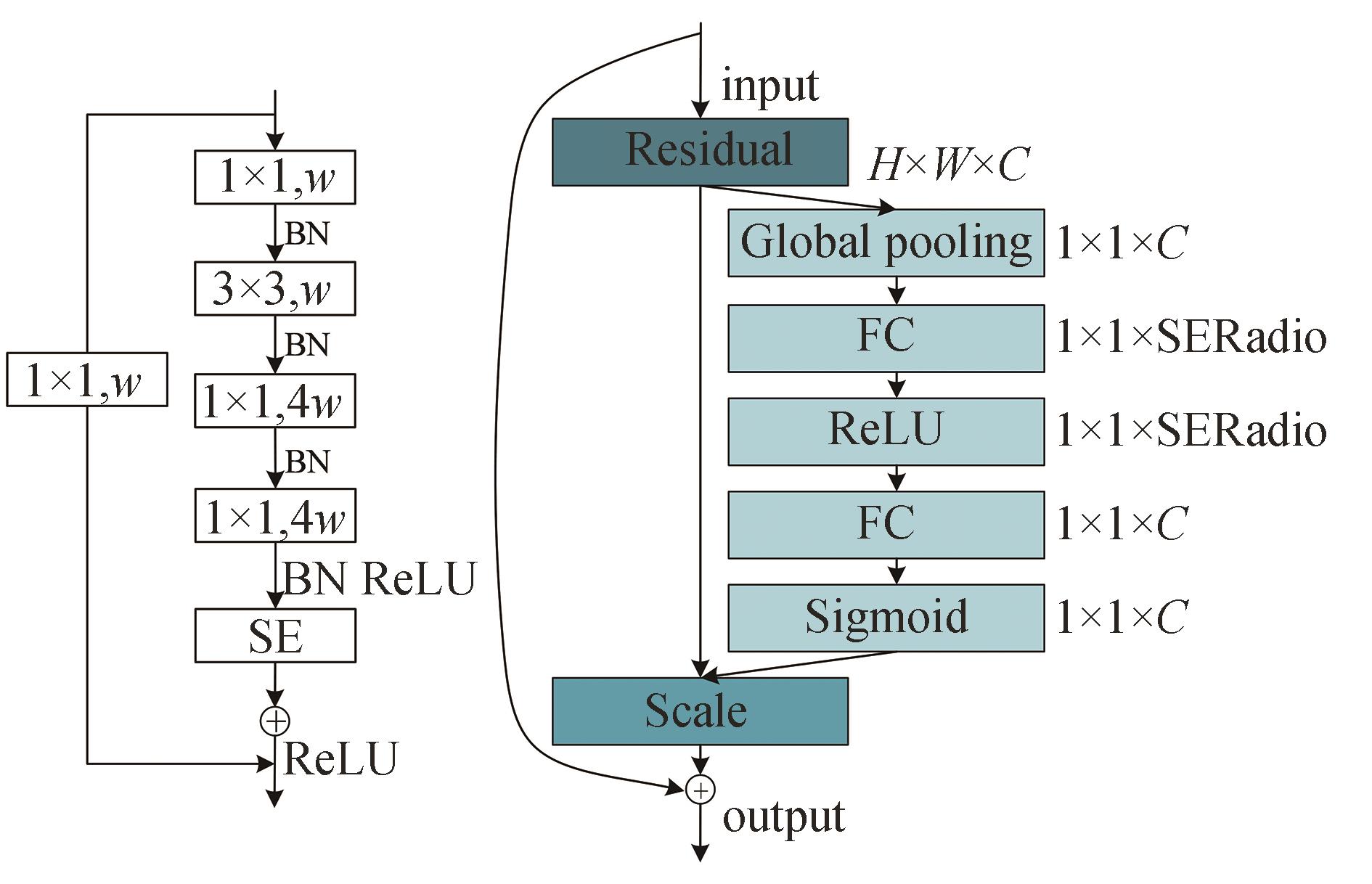
HU J, SHEN L, SUN G. Squeeze-and-excitation networks[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 7132-7141.
|
 ),Zhe Luo1,Yunfei Zha2,Yi Zhang1,Youming Tang3
),Zhe Luo1,Yunfei Zha2,Yi Zhang1,Youming Tang3