Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (8): 1501-1512.doi: 10.19562/j.chinasae.qcgc.2025.08.007
Yingkui Shi1,Chuan Hu1,Jianzhong Zou2( ),Xi Zhang1
),Xi Zhang1
Received:2024-12-03
Revised:2025-02-02
Online:2025-08-25
Published:2025-08-18
Contact:
Jianzhong Zou
E-mail:jianzhong@btc.edu.cn
Yingkui Shi,Chuan Hu,Jianzhong Zou,Xi Zhang. Takeover Control Strategy Based on Human-Machine Game[J].Automotive Engineering, 2025, 47(8): 1501-1512.
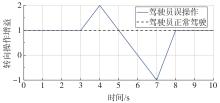
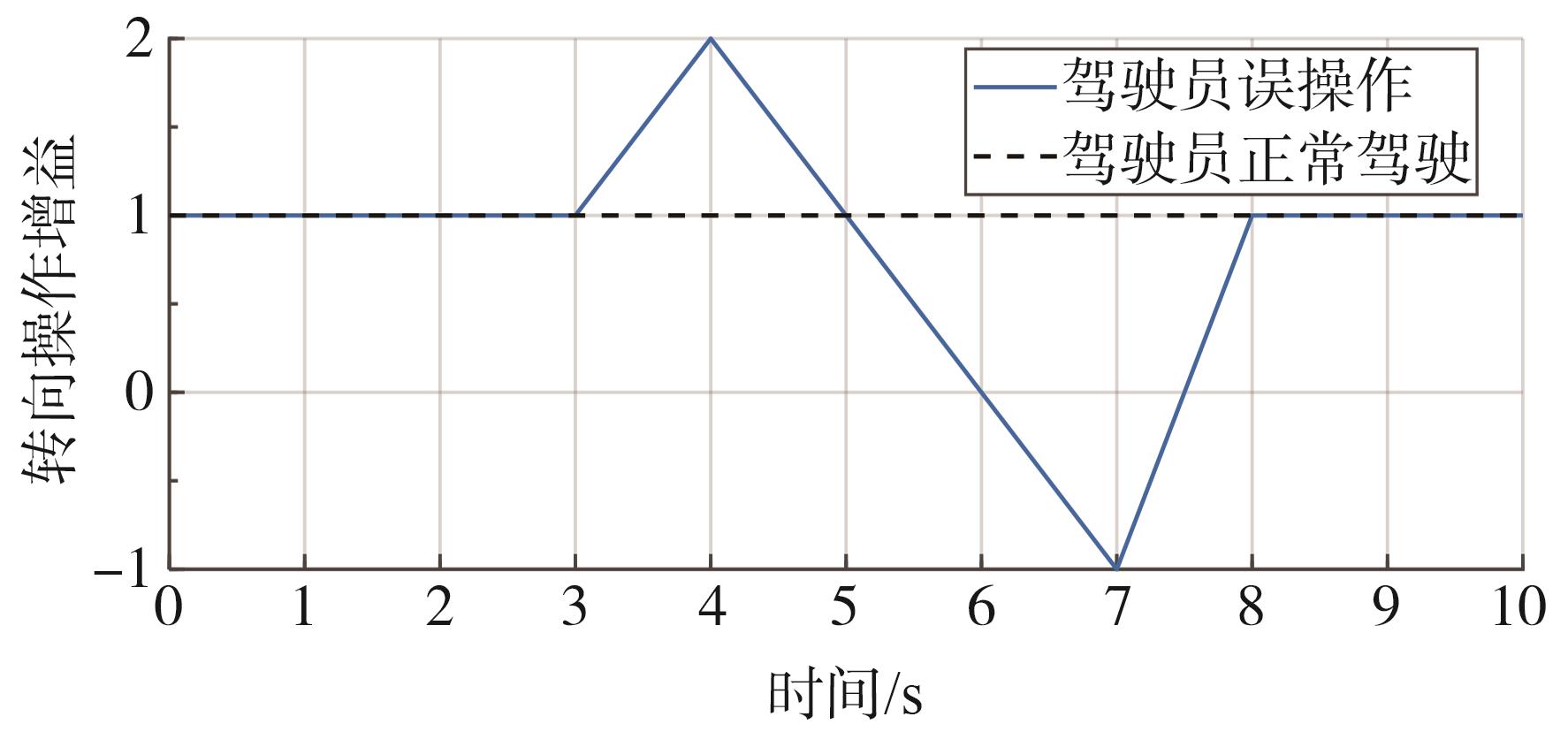
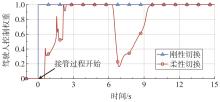
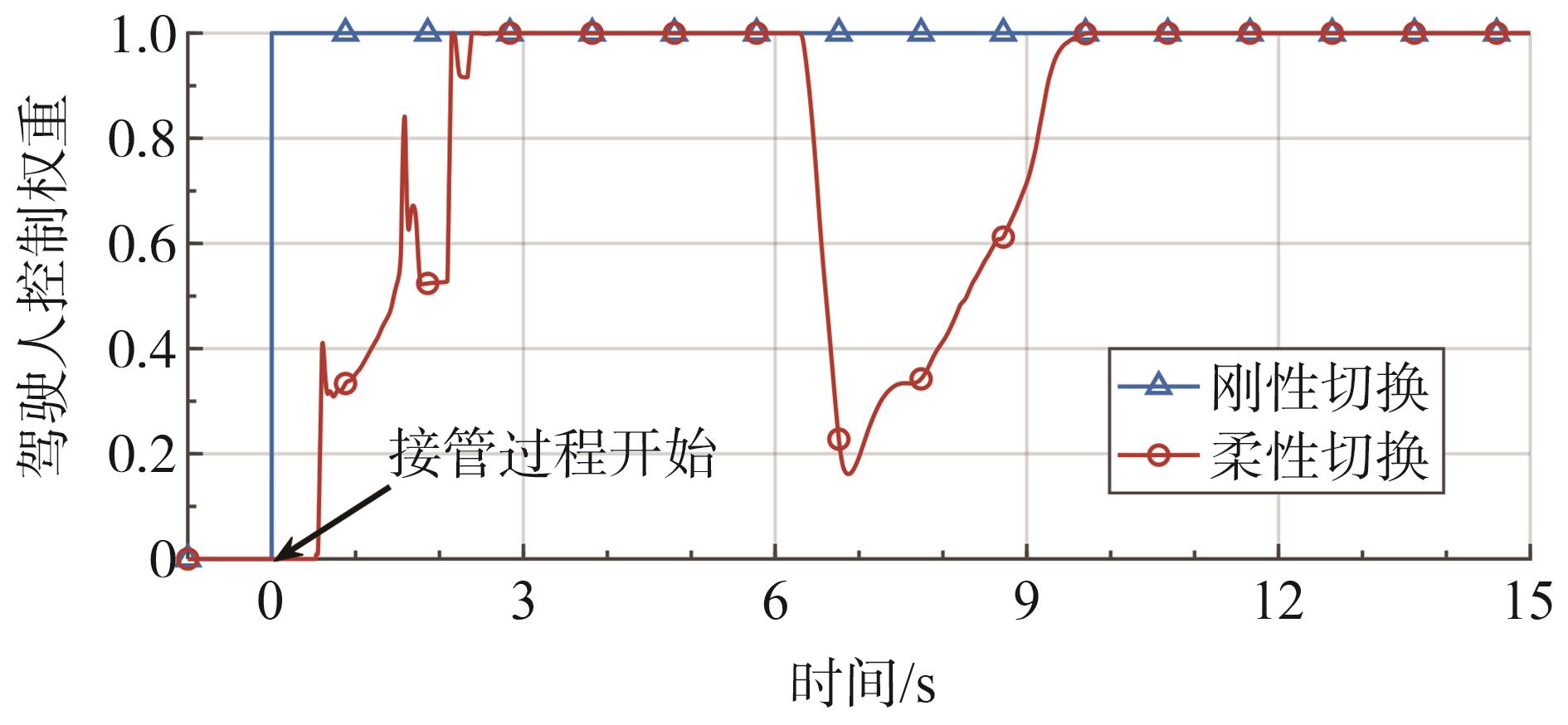
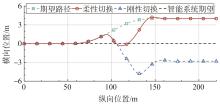
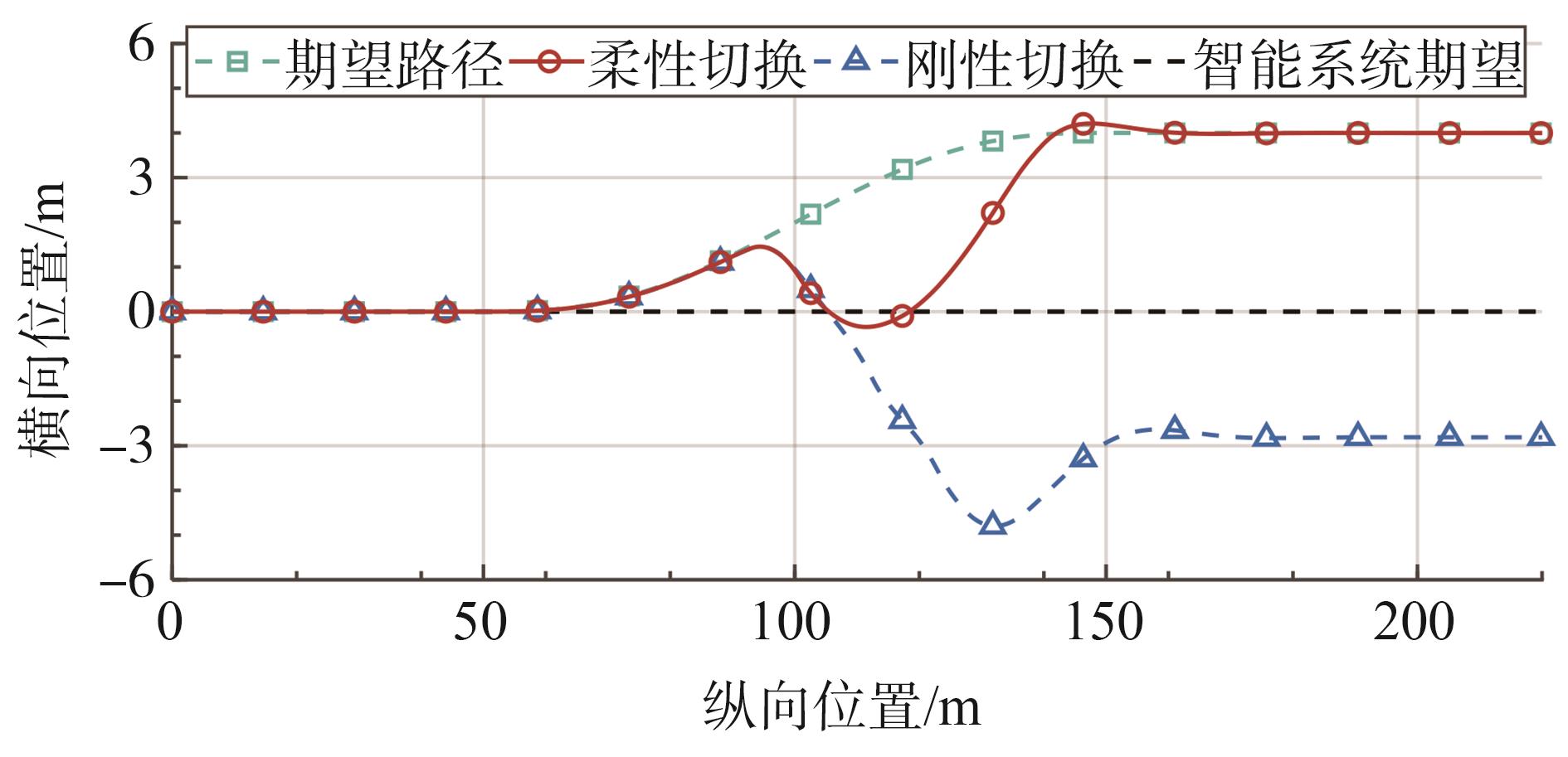
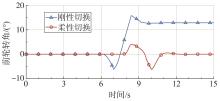
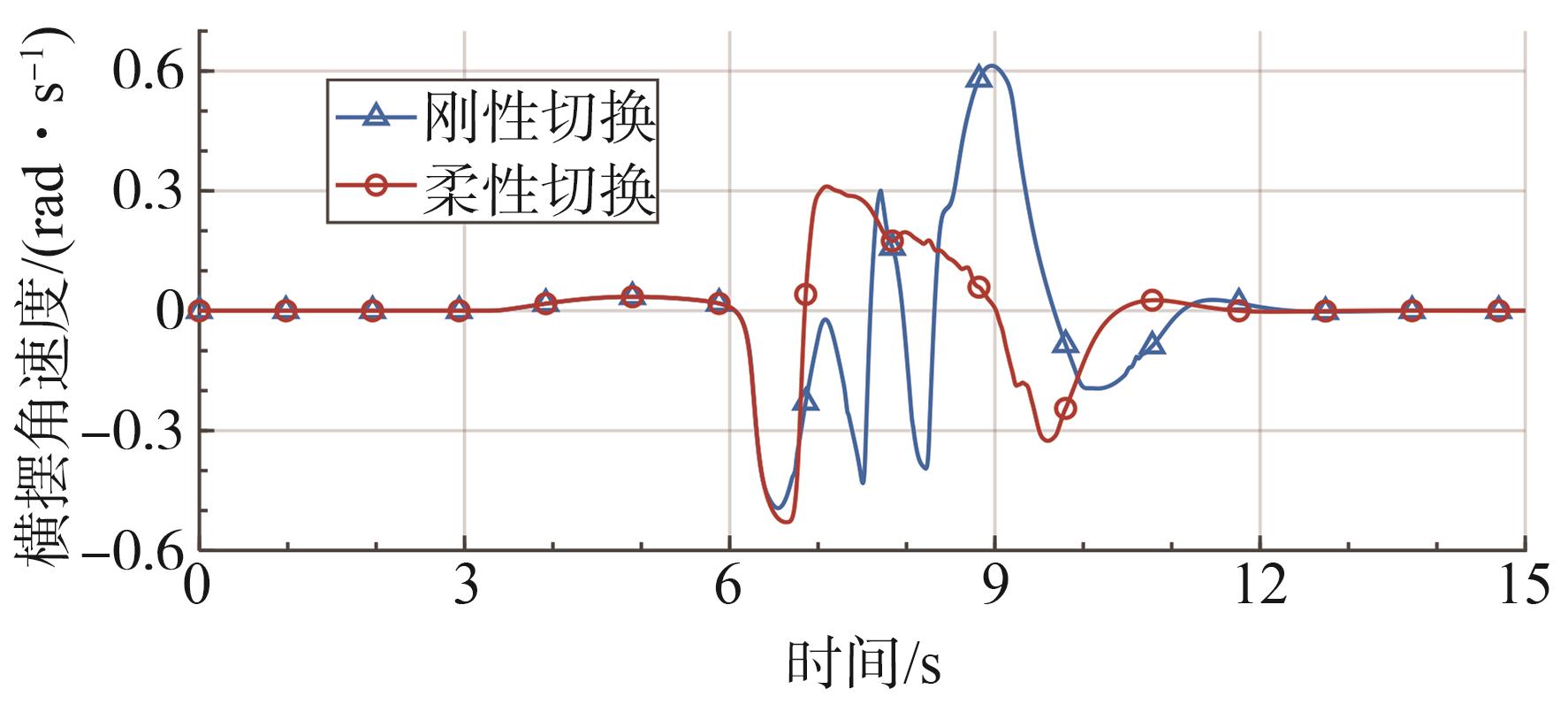
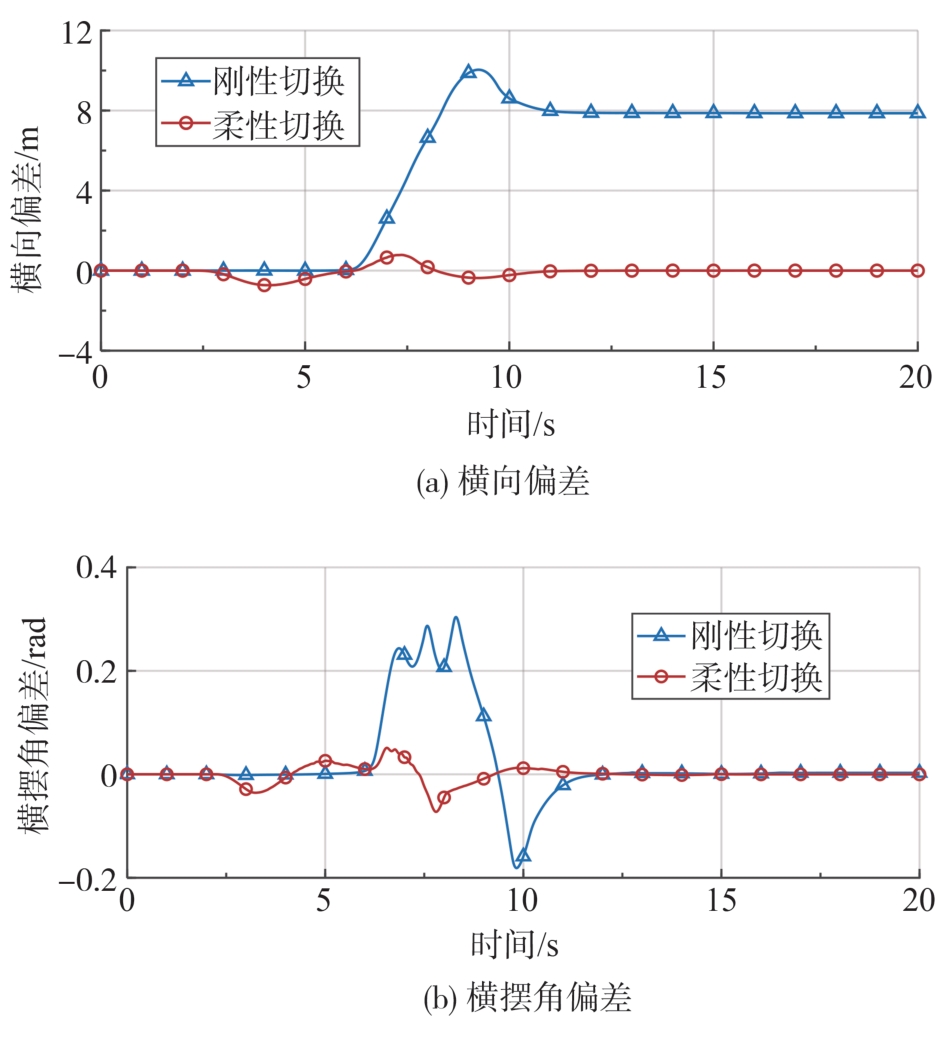
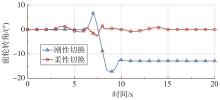
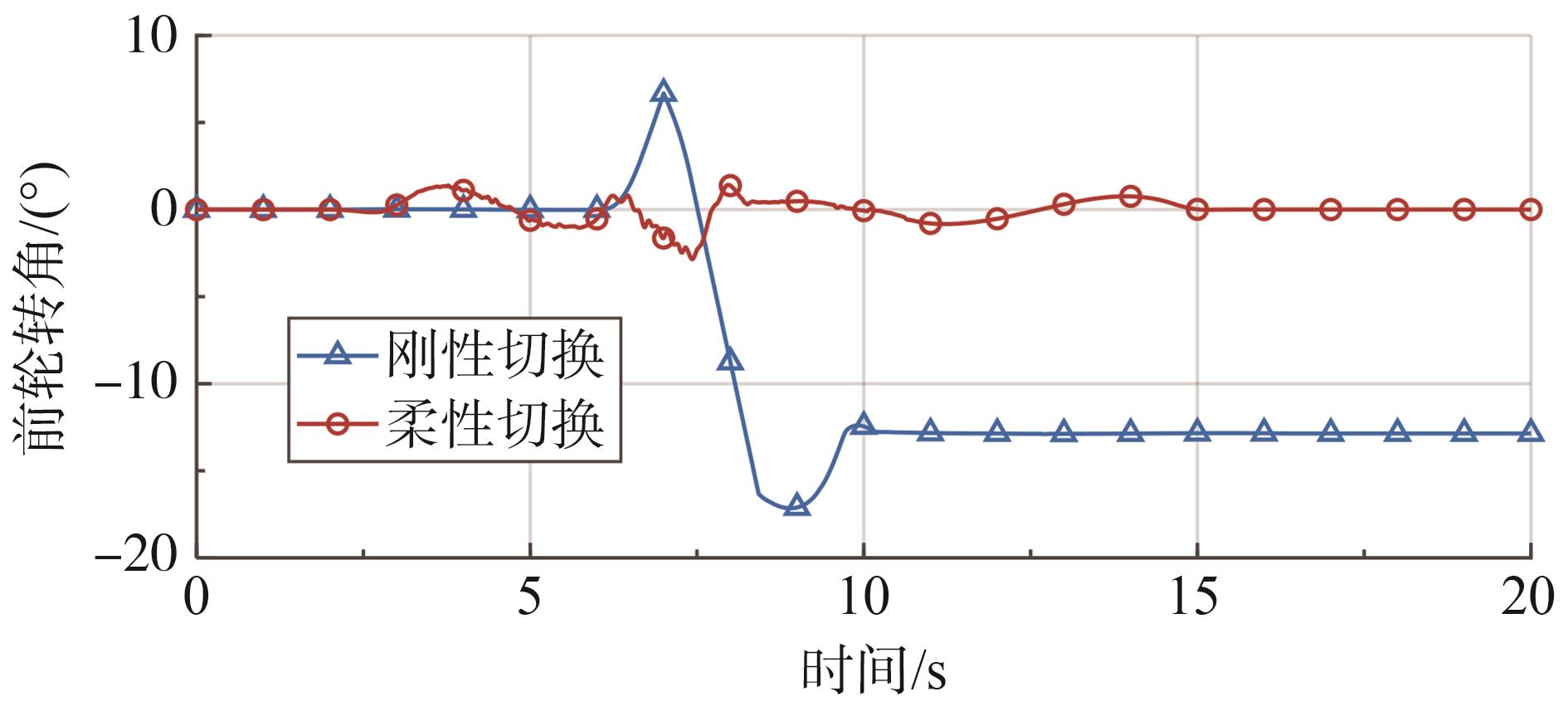
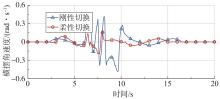
"
"
"
"
"
"
"

"
"
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 1 412 | -112 600 | ||
| 1.015 | -94 548 | ||
| 1.895 | 1 536.7 |
"
"

"
"
"
"
"

"
"
"
| [1] | ESKANDARIAN A, WU C, SUN C. Research advances and cha-llenges of autonomous and connected ground vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(2): 683-711. |
| [2] | 李梦凡, 冯忠祥, 张卫华,等. 面向人机共驾模式下驾驶人接管过程的视觉转移特性研究[J]. 汽车工程, 2024, 46(5): 795-804. |
| LI M F, FENG Z X, ZHANG W H, et al. Study on driver’s transfer characteristics during the takeover process of human-computer co-driving mode[J]. Automotive Engineering, 2024, 46(5): 795-804. | |
| [3] | FANG Z, WANG J, WANG Z, et al. Human-machine shared control for path following considering driver fatigue characteristics[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 7250-7264. |
| [4] | 曾嘉宾, 李靖宇, 尤志栋. 自动驾驶人机共驾环境下驾驶人接管能力研究进展[J]. 交通科技与经济, 2022, 24(5): 30-37. |
| ZENG J B, LI J Y, YOU Z D. A review of progress on drivers’ take-over ability in automated driving human-machine codriving environment[J]. Technology & Economy in Areas of Communications, 2022, 24(5): 30-37. | |
| [5] | CHEN H, ZHAO X, LI Z, et al. Construction and analysis of driver takeover behavior modes based on situation awareness theory[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(2): 4040-4054. |
| [6] | 郭烈, 胥林立, 秦增科, 等. 自动驾驶接管影响因素分析与研究进展[J]. 交通运输系统工程与信息, 2022, 22(2): 72-90. |
| GUO L, XU L L, QIN Z K, et al. Analysis and overview of influencing factors on autonomous driving takeover[J]. Journal of Transp-ortation Systems Engineering and Information Technology, 2022, 22(2): 72-90. | |
| [7] | 孔召权. 面向人机共驾的冲突预测及协同控制策略研究[D]. 成都: 电子科技大学, 2024. |
| KONG Z Q. Research on conflict prediction and collaborative control strategy for driver-automation co-driving[D]. Chengdu: University of Electronic Science and Technology of China, 2024. | |
| [8] | HU L, CAI H, HUANG J, et al. The challenges of driving mode switching in automated vehicles: a review[J]. IEEE Transactions on Vehicular Technology, 2024, 73(2): 1777-1791. |
| [9] | 刘莹. 考虑接管场景的自动-人工驾驶切换过程协同控制方法[D]. 长春: 吉林大学, 2024. |
| LIU Y. Collaborative control for automated-manual driving switching process considering takeover scenarios[D]. Changchun: Jilin University, 2024. | |
| [10] | 吴超仲, 吴浩然, 吕能超. 基于间接共享控制的智能车协同接管方法[J]. 中国公路学报, 2022, 35(3): 101-114. |
| WU C Z, WU H R, LV N C. Cooperative takeover method for automated vehicles based on indirect shared control[J]. China Journal of Highway and Transport, 2022, 35(3): 101-114. | |
| [11] | LV C, LI Y, XING Y, et al. Human-machine collaboration for automated driving using an intelligent two-phase haptic interface[J]. Advanced Intelligent Systems, 2021, 3(4): 2000229. |
| [12] | ZHANG Z, WANG C, ZHAO W, et al. Driving authority allocation strategy based on driving authority real-time allocation domain[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 8528-8543. |
| [13] | ZHAO Y, XIE Z, XU C, et al. A novel haptic takeover method based on human-machine collaboration states[C]. 2024 14th Asian Control Conference (ASCC), 2024: 362-367. |
| [14] | LI W, LI Q, LI S E, et al. Indirect shared control through non-zero sum differential game for cooperative automated driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 15980-15992. |
| [15] | MA B, LIU Y, NA X, et al. A shared steering controller design based on steer-by-wire system considering human-machine goal consis-tency[J]. Journal of the Franklin Institute, 2019, 356(8): 4397-4419. |
| [16] | LI M, SONG X, CAO H, et al. Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field[J]. Mechanical Systems and Signal Processing, 2019, 124: 199-216. |
| [17] | SWAIN S K, RATH J J, VELUVOLU K C. Cooperative game theory based robust shared lateral control for driver vehicle interactions[J]. Control Engineering Practice, 2023, 141: 105678. |
| [18] | SUN W, WANG X, ZHANG C. A model-free control strategy for vehicle lateral stability with adaptive dynamic programming[J]. IEEE Transactions on Industrial Electronics, 2019, 67(12): 10693-10701. |
| [19] | JIANG Y, JIANG Z P. Robust adaptive dynamic programming[M]. Hoboken, New Jersey: Wiley : IEEE Press, 2017. |
| [20] | ZHANG K, SU R, ZHANG H G, et al. Adaptive resilient event-triggered control design of autonomous vehicles with an iterative single critic learning framework[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(12): 5502-5511. |
| [21] | WANG Y, DUAN G, LI P. Event-triggered adaptive sliding mode control of uncertain nonlinear systems based on fully actuated system approach[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2024, 71(5): 2749-2753. |
| [22] | 江浩斌, 袁培淳, 杨昆, 等. 基于Simscape的APA-EPS系统建模及人机共驾转向控制策略研究[J]. 汽车工程, 2023, 45(12): 2209-2221. |
| JIANG H B, YUAN P C, YANG K, et al. Simscape-based APA-EPS system modeling and human-machine co-driving steering control strategies research[J]. Automotive Engineering, 2023, 45(12): 2209-2221. | |
| [23] | LUO B, YANG Y, LIU D, et al. Event-triggered optimal control with performance guarantees using adaptive dynamic programming[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(1): 76-88. |
| [24] | XUE S, LUO B, LIU D. Event-triggered adaptive dynamic programming for unmatched uncertain nonlinear continuous-time systems[J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(7): 2939-2951. |
| [25] | ZHAO B, LIU D, LUO C. Reinforcement learning-based optimal stabilization for unknown nonlinear systems subject to inputs with uncertain constraints[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(10): 4330-4340. |
| [26] | ZHANG Y, ZHAO B, LIU D, et al. Event-triggered control of discrete-time zero-sum games via deterministic policy gradient adaptive dynamic programming[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(8): 4823-4835. |
| [27] | YANG X, HE H. Adaptive critic designs for event-triggered robust control of nonlinear systems with unknown dynamics[J]. IEEE Transactions on Cybernetics, 2019, 49(6): 2255-2267. |
| [28] | ZHANG Y, ZHAO B, LIU D, et al. Event-triggered optimal tracking control of multiplayer unknown nonlinear systems via adaptive critic designs[J]. International Journal of Robust and Nonlinear Control, 2022, 32(1): 29-51. |
| [1] | Mingchen Wang,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. MSF-Diffuser: A Multi-sensor Adaptive Fusion Autonomous Driving Method Based on Diffusion Model Under BEV [J]. Automotive Engineering, 2025, 47(6): 1122-1132. |
| [2] | Lingyun Zhu,Haiyang Wang. Autonomous Vehicle Object Detection by LiDAR Point Cloud Feature Completion in Snowfall Scenarios [J]. Automotive Engineering, 2025, 47(6): 1133-1143. |
| [3] | Qinglu Ma,Qiuwei Jian,Meiqiang Li,Zheng Zou. Lane-Level LiDAR-Visual Fusion SLAM in Autonomous Driving Environment [J]. Automotive Engineering, 2025, 47(6): 1155-1168. |
| [4] | Xinyu Sun,Lisheng Jin,Zhen Huo,Huanhuan Wang,Yang He,Dong Liu. Three-Dimensional Multi-object Tracking Algorithm Based on Angle Intersection over Union and Adaptive Lifecycle [J]. Automotive Engineering, 2025, 47(6): 1169-1176. |
| [5] | Chenyu Liu,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Camera and Radar Fusion for Autonomous Driving Scenarios [J]. Automotive Engineering, 2025, 47(5): 829-838. |
| [6] | Qirui Qin,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Real-Time Instance Segmentation Algorithm for Autonomous Driving Based on Instance Activation Maps [J]. Automotive Engineering, 2025, 47(4): 614-624. |
| [7] | Jinhui Suo, Xiaowei Wang, Peiwen Jiang, Chi Ding, Ming Gao, Yougang Bian. Domain Adaptive Visual Object Detection for Autonomous Driving Based on Multi-granularity Relation Reasoning [J]. Automotive Engineering, 2025, 47(2): 201-210. |
| [8] | Jiangkun Li,Ruixue Zong,Weiwen Deng,Ying Wang,Juan Ding. Directed Graph-Based Method for Evaluating Similarity in Urban Intersection Scenarios [J]. Automotive Engineering, 2025, 47(1): 23-34. |
| [9] | Daofei Li,Hao Pan. Application of Scenario Complexity Evaluation in Trajectory Prediction and Automated Driving Decision-Making [J]. Automotive Engineering, 2024, 46(9): 1556-1563. |
| [10] | Hai Wang,Jianguo Li,Yingfeng Cai,Long Chen. A LiDAR-Based Dynamic Driving Scene Multi-task Segmentation Network [J]. Automotive Engineering, 2024, 46(9): 1608-1616. |
| [11] | Jianan Zhang,Zhaozheng Hu,Jie Meng,Huahua Hu,Jie Zuo. Distributed Simulation Platform Architecture and Application of Autonomous Driving for Vehicle-Road-Map Collaboration [J]. Automotive Engineering, 2024, 46(8): 1335-1345. |
| [12] | Le Tao,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Point Cloud for Autonomous Driving Scenarios [J]. Automotive Engineering, 2024, 46(7): 1208-1218. |
| [13] | Linhui Li,Yifan Fu,Ting Wang,Xuecheng Wang,Jing Lian. Trajectory Prediction Method Enhanced by Self-supervised Pretraining [J]. Automotive Engineering, 2024, 46(7): 1219-1227. |
| [14] | Hai Wang,Yuxuan Ding,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-class Multi-target Tracking Algorithm Combining Motion Speed and Appearance Features in Driving Scenarios [J]. Automotive Engineering, 2024, 46(6): 956-964. |
| [15] | Jing Huang,Xiangzhen Liu,Xiaoyang Deng,Ran Chen. Research on Intelligent Vehicle Trajectory Planning Based on Multimodal Trajectory Prediction [J]. Automotive Engineering, 2024, 46(6): 965-974. |
|
||