汽车工程 ›› 2021, Vol. 43 ›› Issue (10): 1442-1447.doi: 10.19562/j.chinasae.qcgc.2021.10.004
冷江昊,孙超( ),卢兵
),卢兵
Jianghao Leng,Chao Sun(),Bing Lu
摘要:
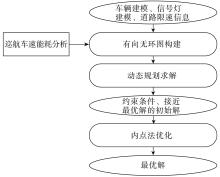
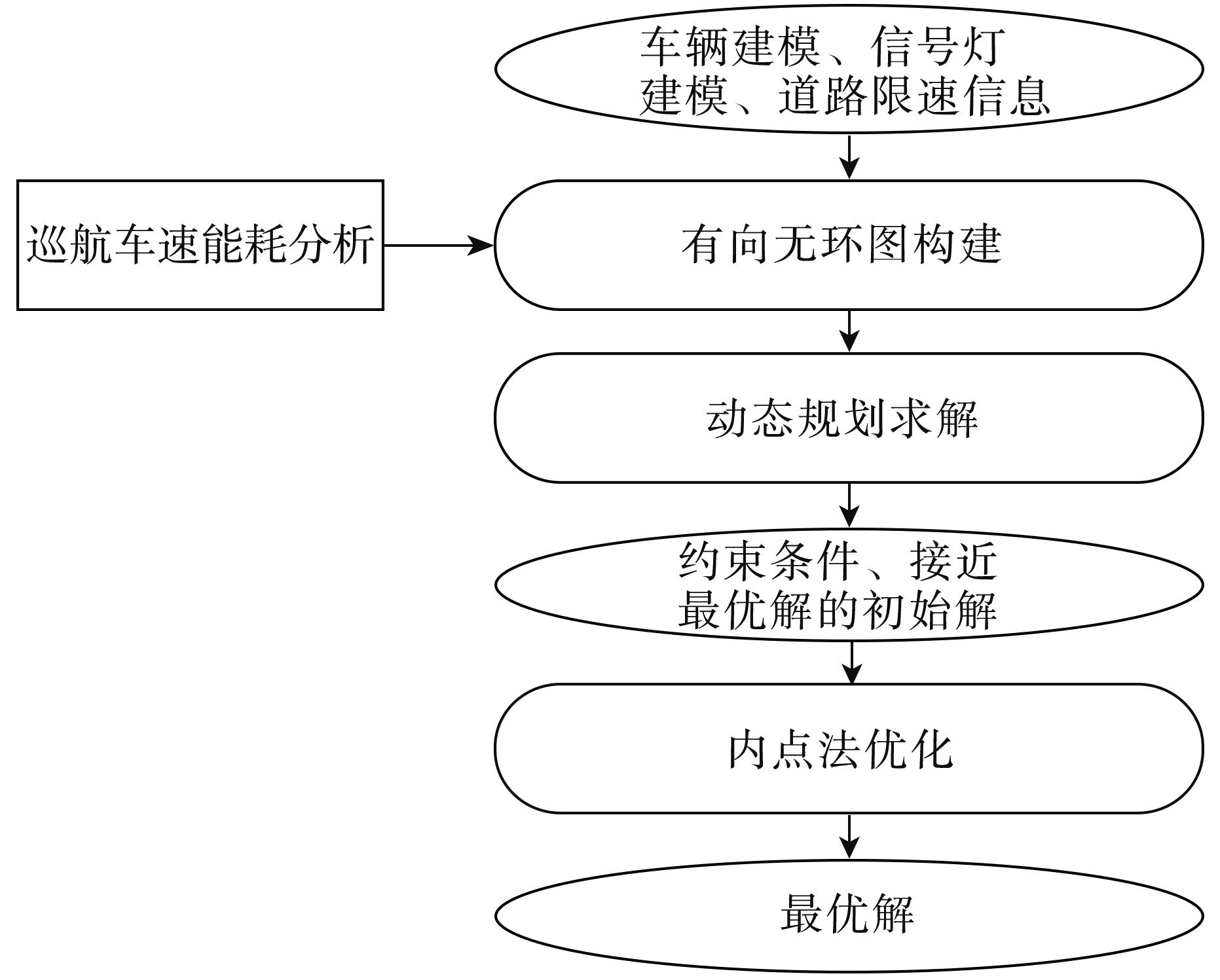
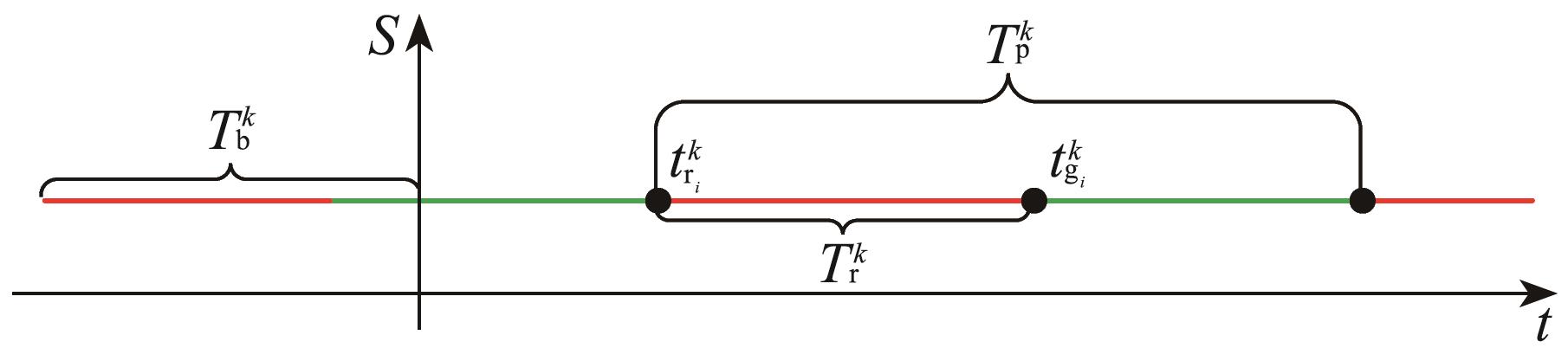
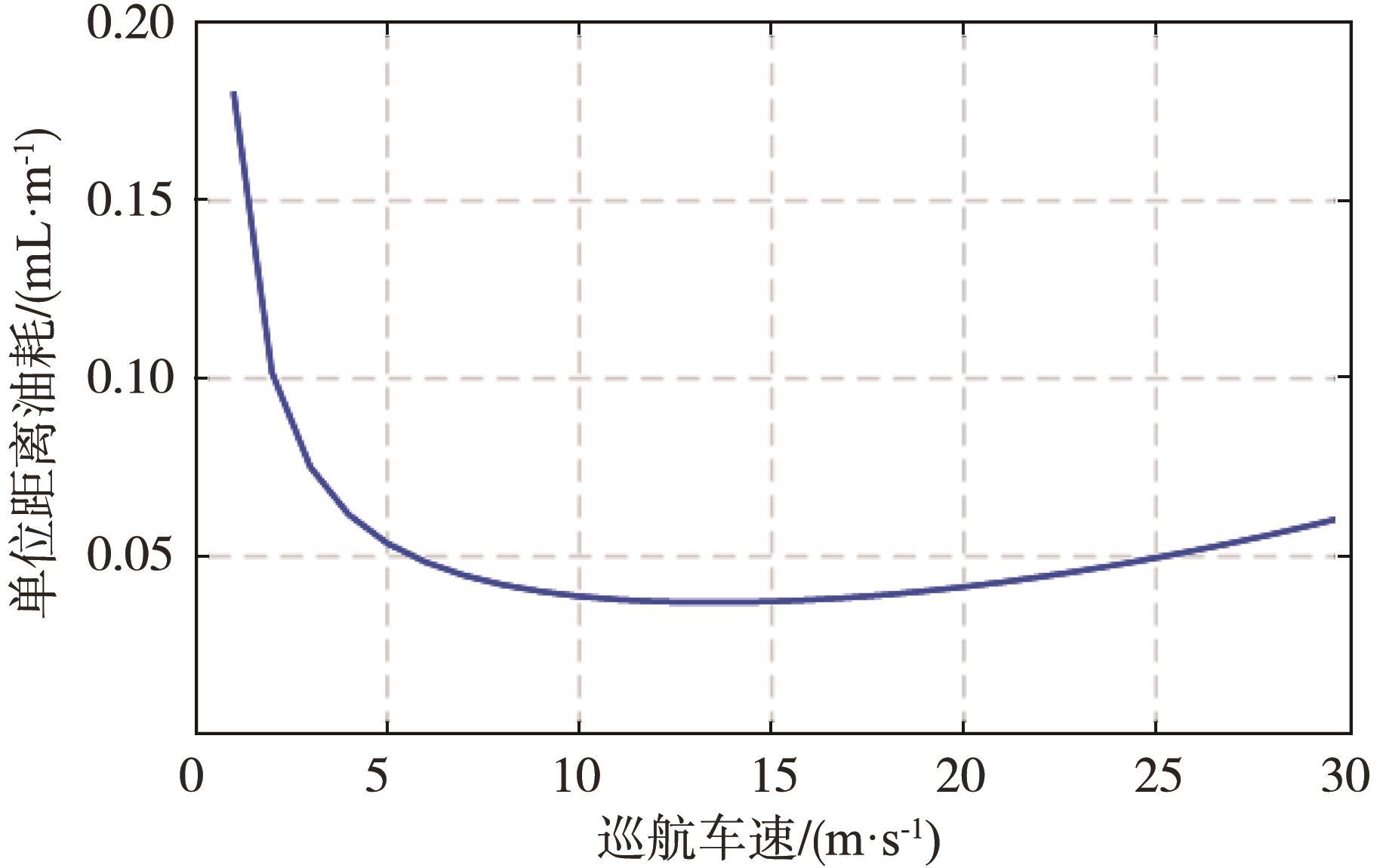
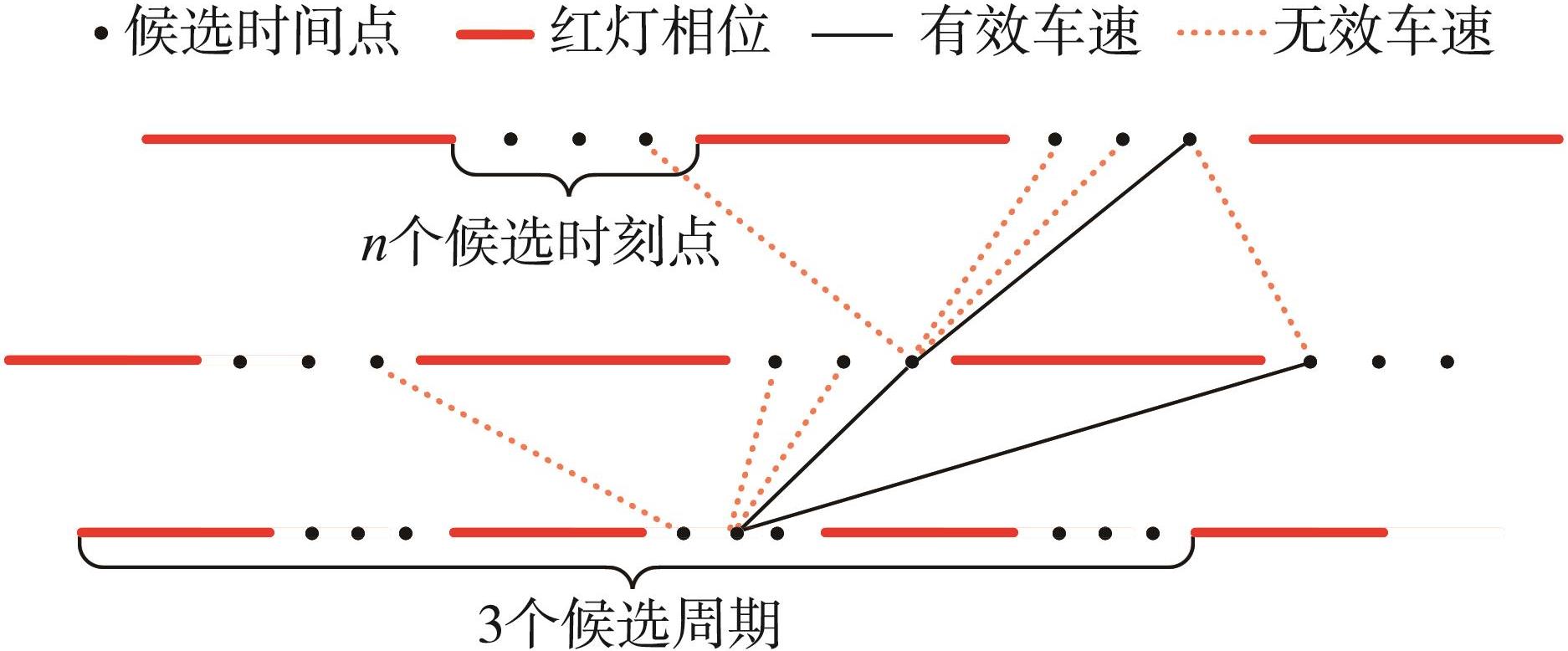
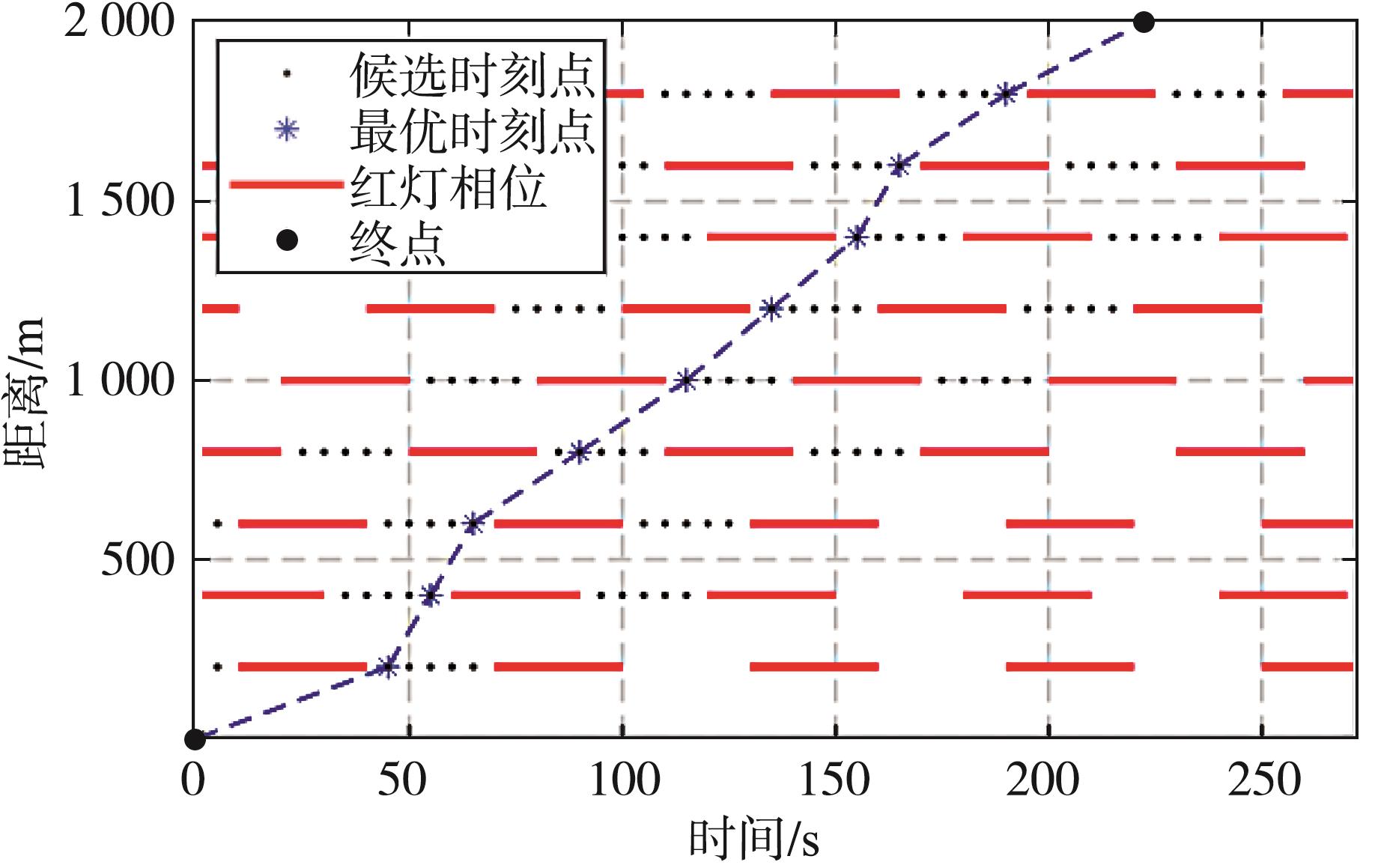
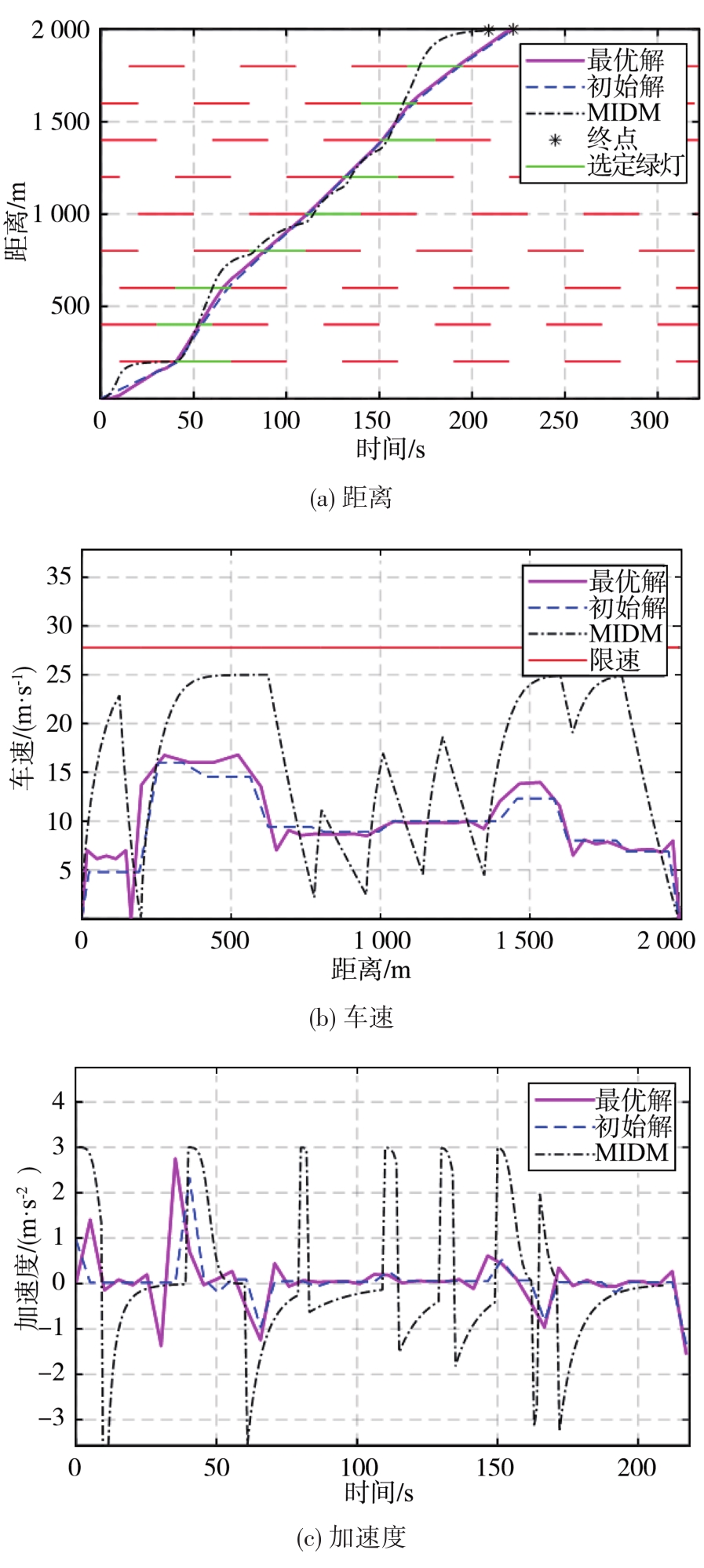
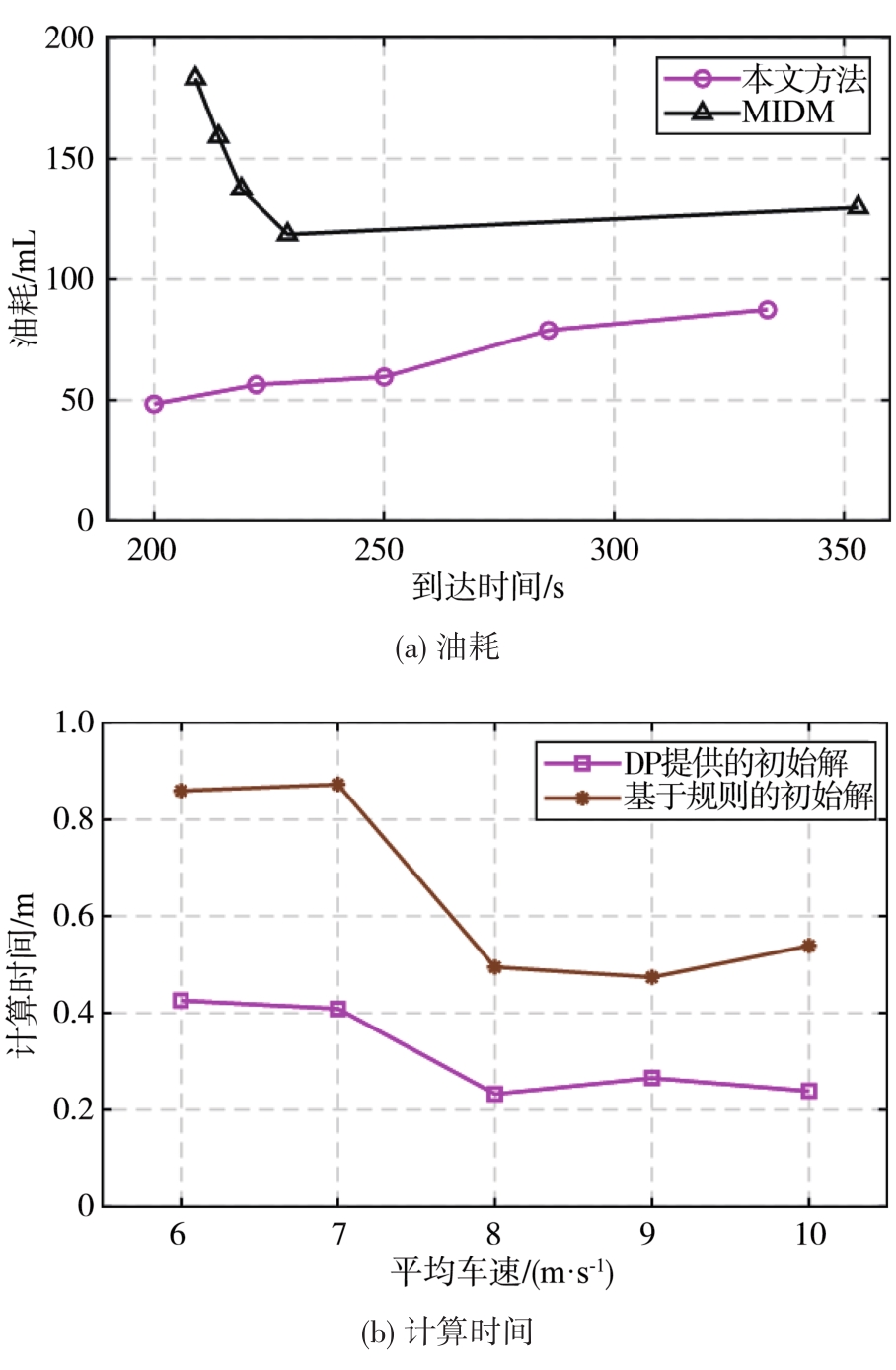
现有面向多信号灯路口复杂场景的智能车辆节能车速规划方法,往往计算量大,难以实时应用。本文中提出了一种结合动态规划算法和内点法进行联合优化的智能车辆节能车速规划算法,能够基于车辆能耗模型和信号灯信息,快速计算道路节能参考车速,实现实时应用。本文中首先建立了车辆能耗模型和信号灯相位时刻数学模型,在每个信号灯路口进行时间采样,构建基于巡航车速单位距离能耗的有向无环图,并使用动态规划算法求解最优绿灯通行周期。将最优绿灯通行周期作为约束条件,建立最优控制问题并转化为非线性优化问题,使用内点法进行优化求解。动态规划求解有向无环图所得解为内点法提供近似最优的初始解,提升收敛速度。最后构建了仿真场景进行分析验证,结果表明:(1)本文提出的方法较改进的智能驾驶员模型能够有效降低能耗30%以上;(2) 与基于规则的迭代初始值生成方法相比,动态规划提供的近似最优的初始解提高计算速度40%以上。