汽车工程 ›› 2024, Vol. 46 ›› Issue (3): 526-535.doi: 10.19562/j.chinasae.qcgc.2024.03.017
• • 上一篇
吴杰1,3( ),张辉2
),张辉2
收稿日期:2023-06-29
修回日期:2023-10-06
出版日期:2024-03-25
发布日期:2024-03-18
通讯作者:
吴杰
E-mail:jiewu323@163.com
基金资助:
Jie Wu1,3(),Hui Zhang2
Received:2023-06-29
Revised:2023-10-06
Online:2024-03-25
Published:2024-03-18
Contact:
Jie Wu
E-mail:jiewu323@163.com
摘要:
针对磁流变制动器制动力矩输出不稳定的问题,采用遗传算法优化后的模糊PID控制器对双线圈磁流变制动器进行力矩控制。基于Bingham模型建立了双线圈磁流变制动器的制动力矩数学模型,同时推导了磁流变制动器的动态模型。完成了双线圈磁流变制动器的制动力矩实验,当励磁电流为1.0 A时,磁流变制动器制动力矩最大值为4.8 N·m;采用最小二乘结构模型,开展了双线圈磁流变制动器传递函数的参数辨识;基于遗传算法和模糊PID控制,设计了双线圈磁流变制动器的遗传算法优化的模糊PID控制器;搭建了磁流变制动器控制实验平台,开展了磁流变制动器力矩控制实验研究。研究结果表明,相比于传统模糊PID控制,在基于遗传算法优化的模糊PID控制下,双线圈磁流变制动器能实现较好的力矩控制效果,制动力矩阶跃响应上升时间为0.63 s,超调量为4.17%,制动力矩跟踪误差在0.2 N·m以内,具有较快的响应速度、较小的超调量以及较小的力矩跟踪误差。
吴杰,张辉. 遗传算法优化的双线圈磁流变制动器模糊PID控制[J]. 汽车工程, 2024, 46(3): 526-535.
Jie Wu,Hui Zhang. Fuzzy PID Control Based on Genetic Algorithm Optimization of a Dual-coil Magnetorheological Brake[J]. Automotive Engineering, 2024, 46(3): 526-535.

图1
双线圈磁流变制动器结构示意图1-输入轴;2-磁流变液;3-左外壳;4-缸筒;5-左线圈;6-隔磁环a;7-外壳;8-转子圆筒a;9-定子圆筒;10-转子圆筒b;11-定子;12-隔磁环b;13-右线圈;14-右外壳。"
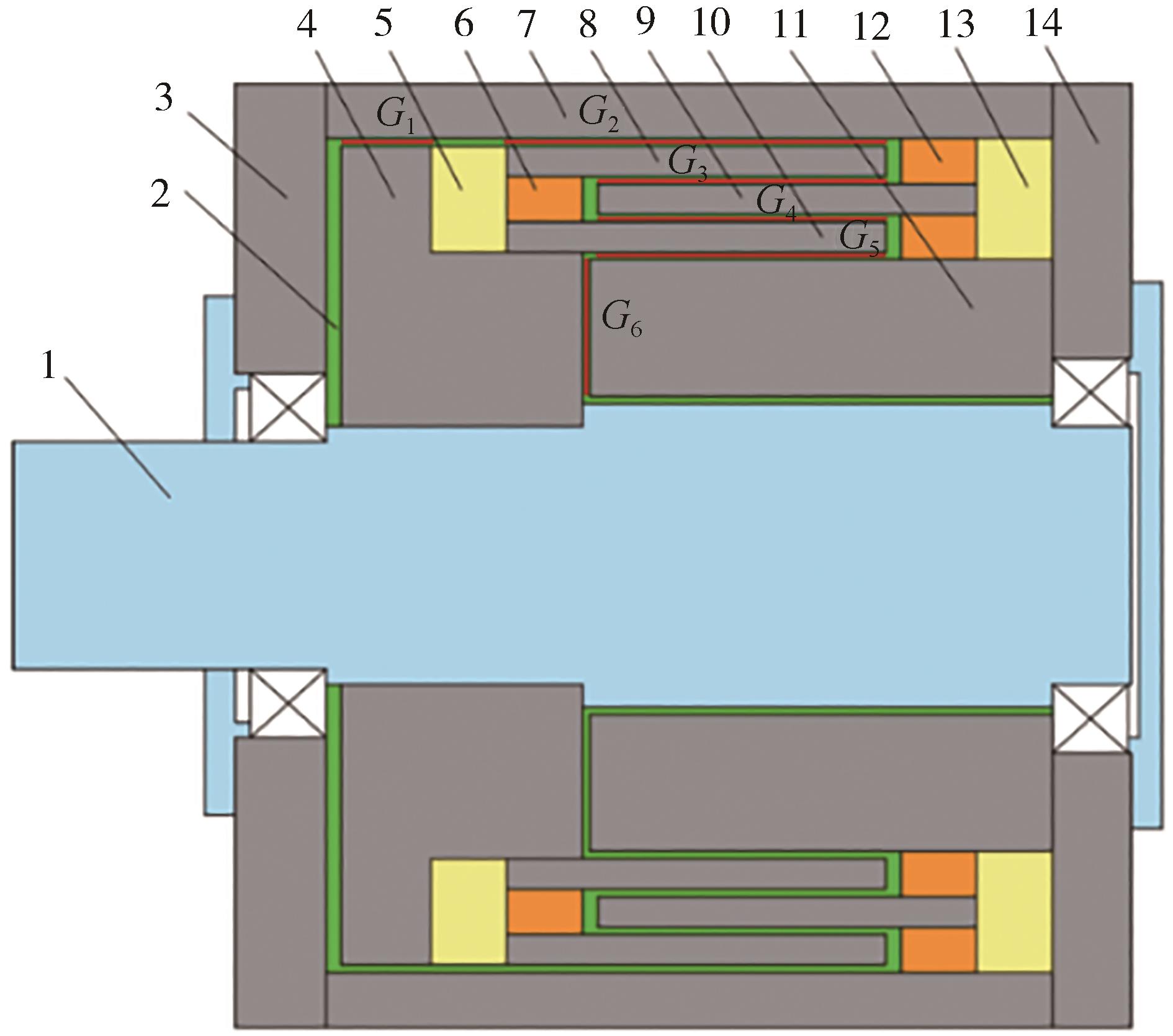
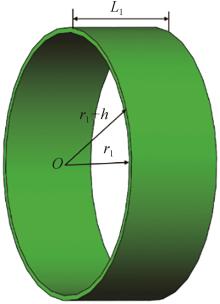
图2
间隙G1示意图"
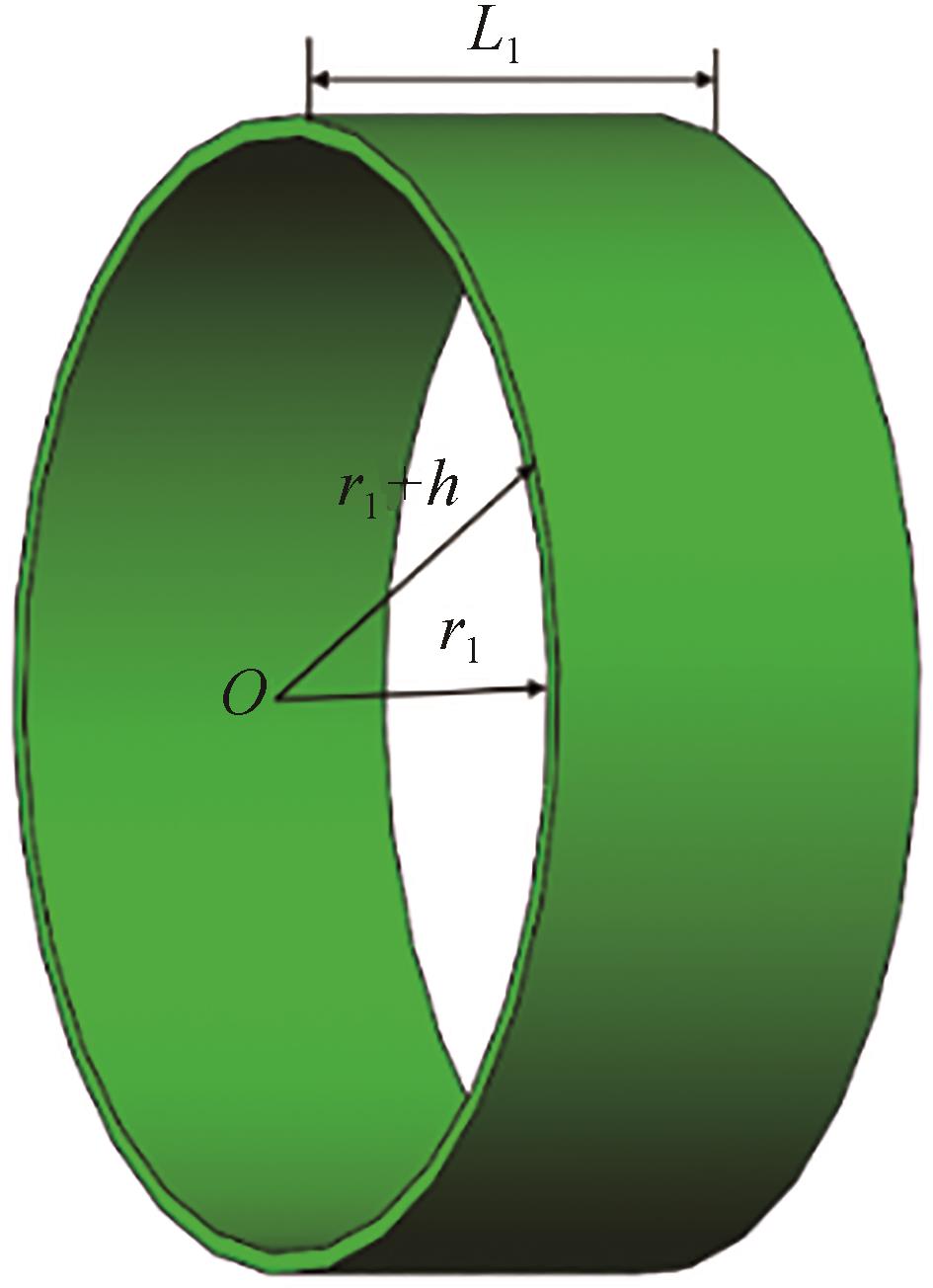
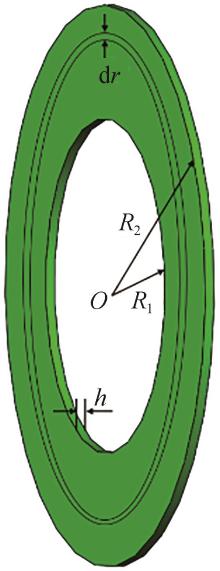
图3
间隙G6示意图"

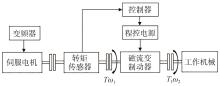
图4
磁流变制动器控制系统原理图"
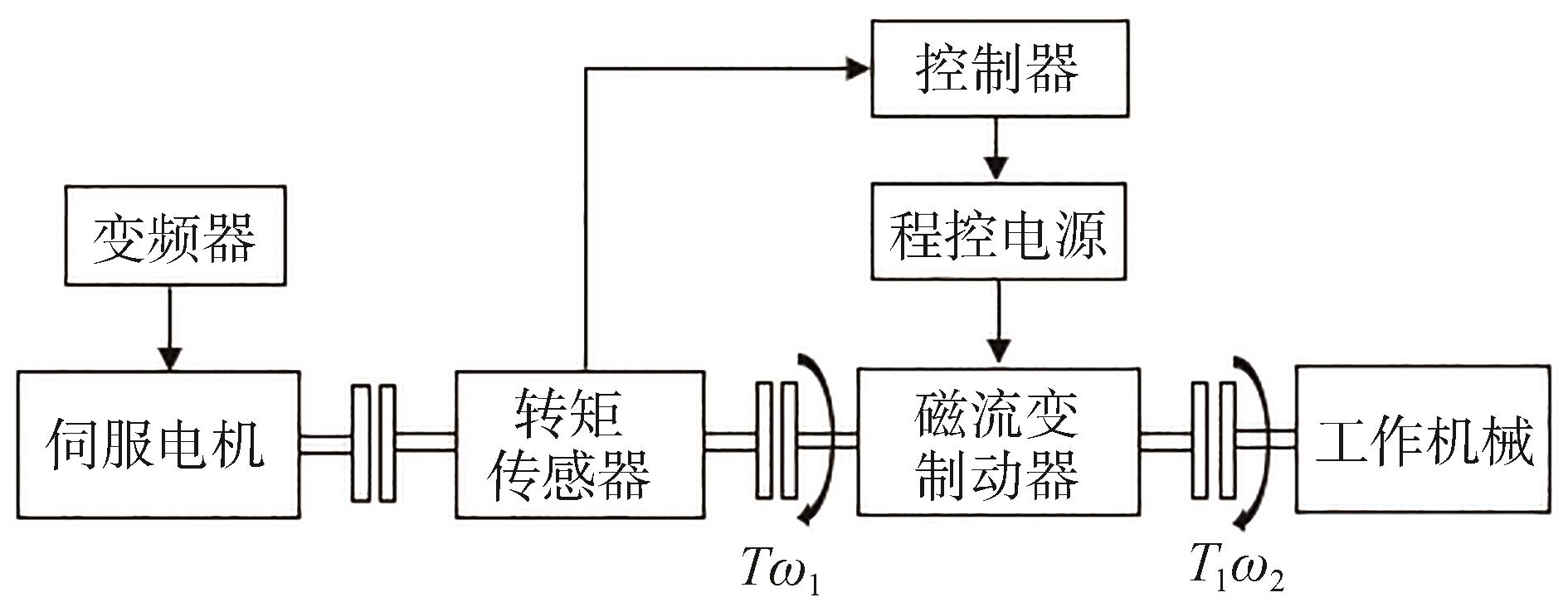
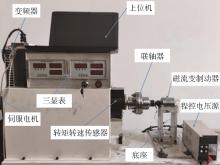
图5
磁流变制动器制动力矩实验平台"
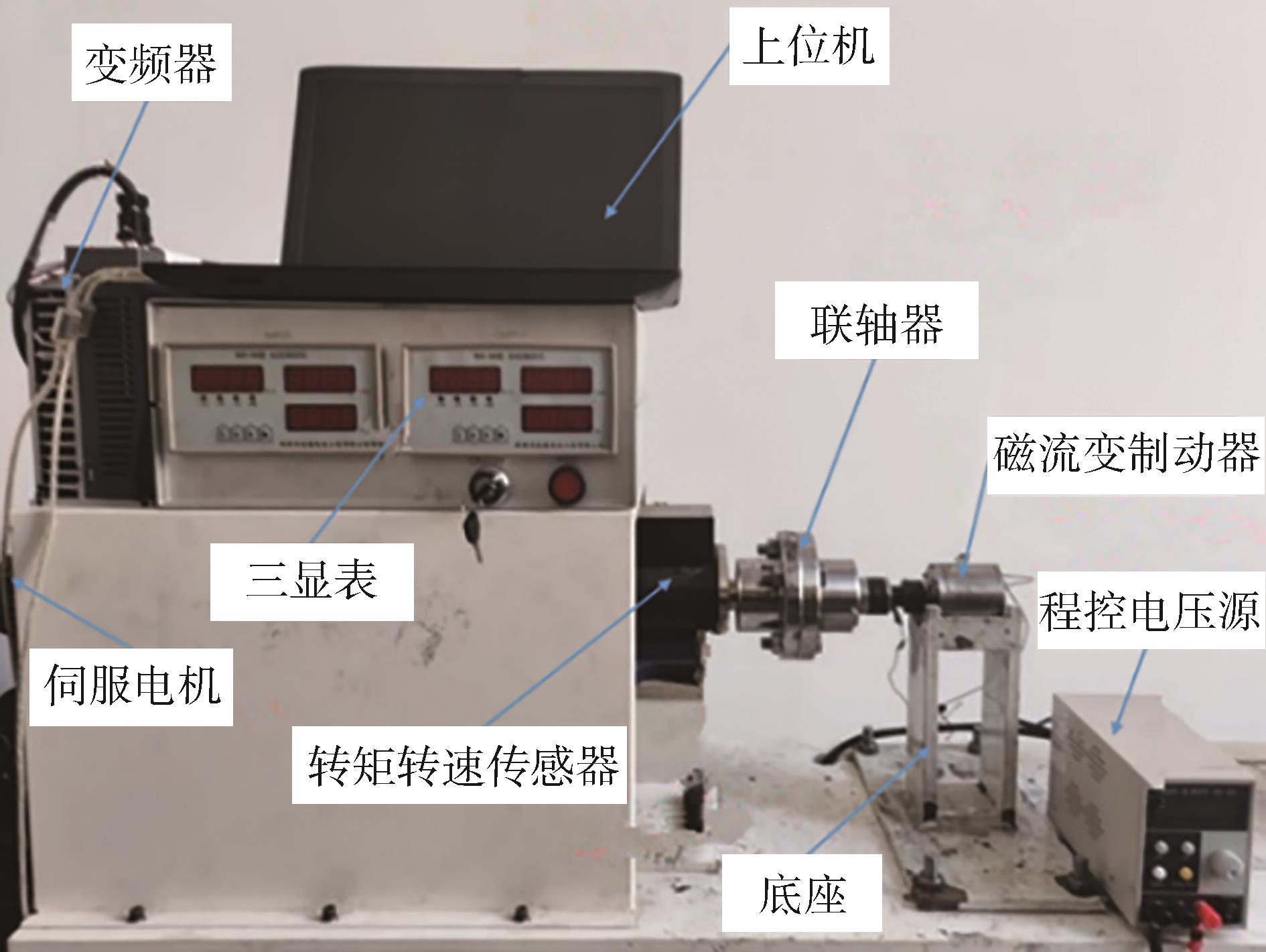
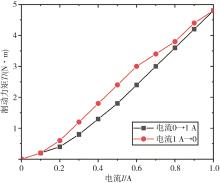
图6
磁流变制动器的制动力矩实验值"
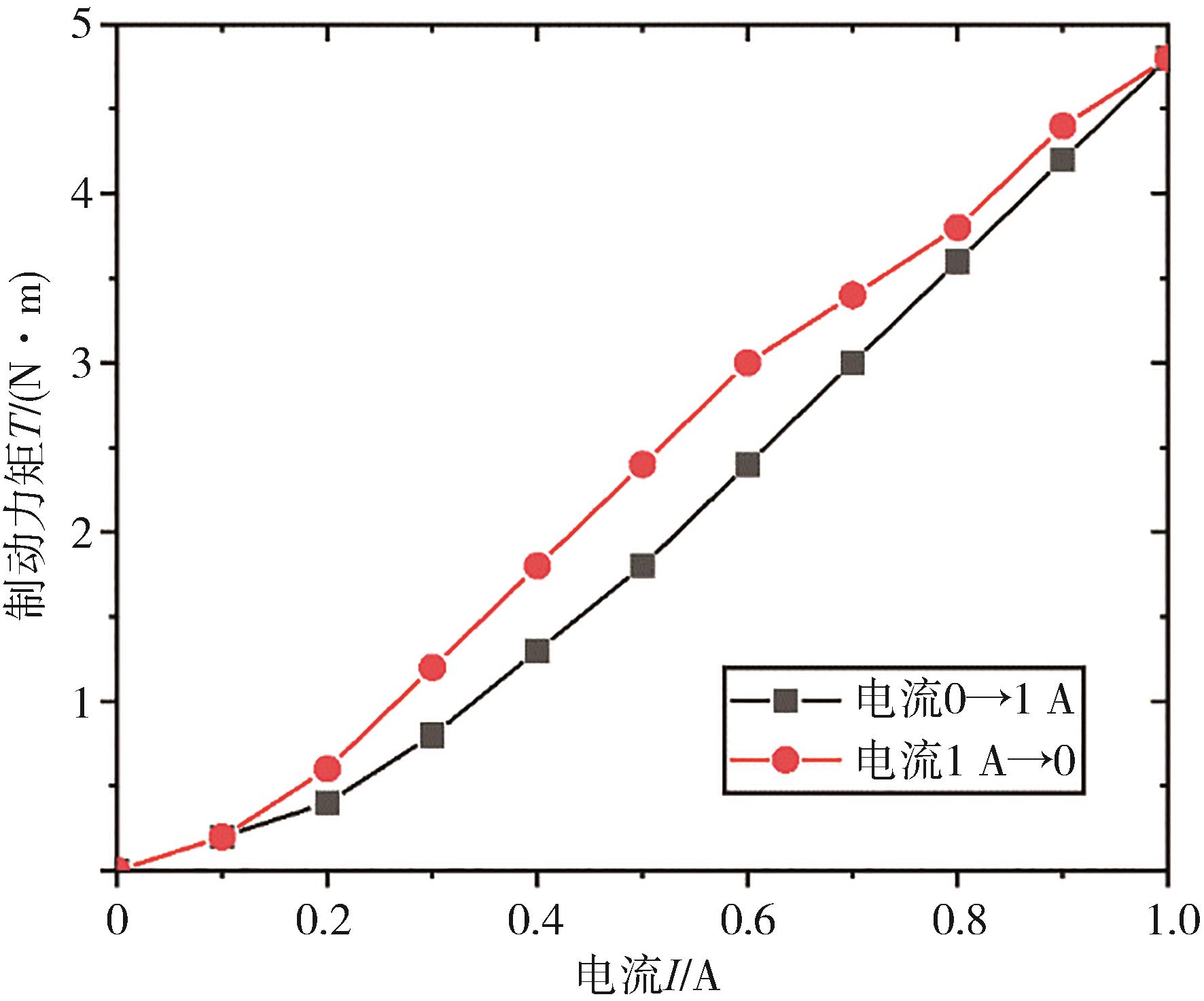

图7
模糊PID控制框图"
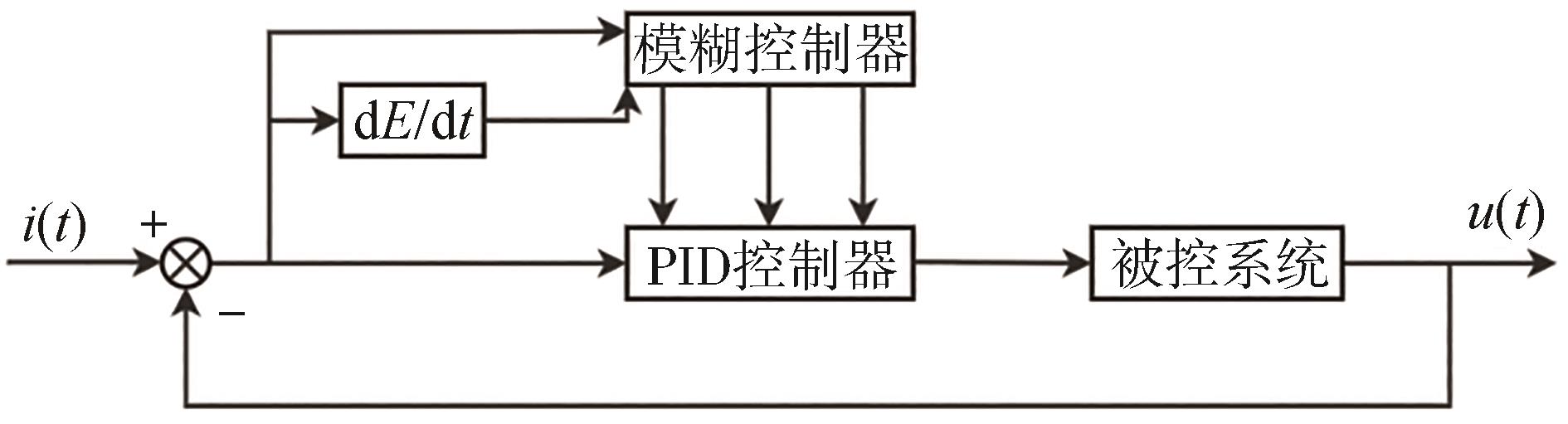

图8
交叉过程"


图9
变异过程"

图10
遗传算法寻优过程"
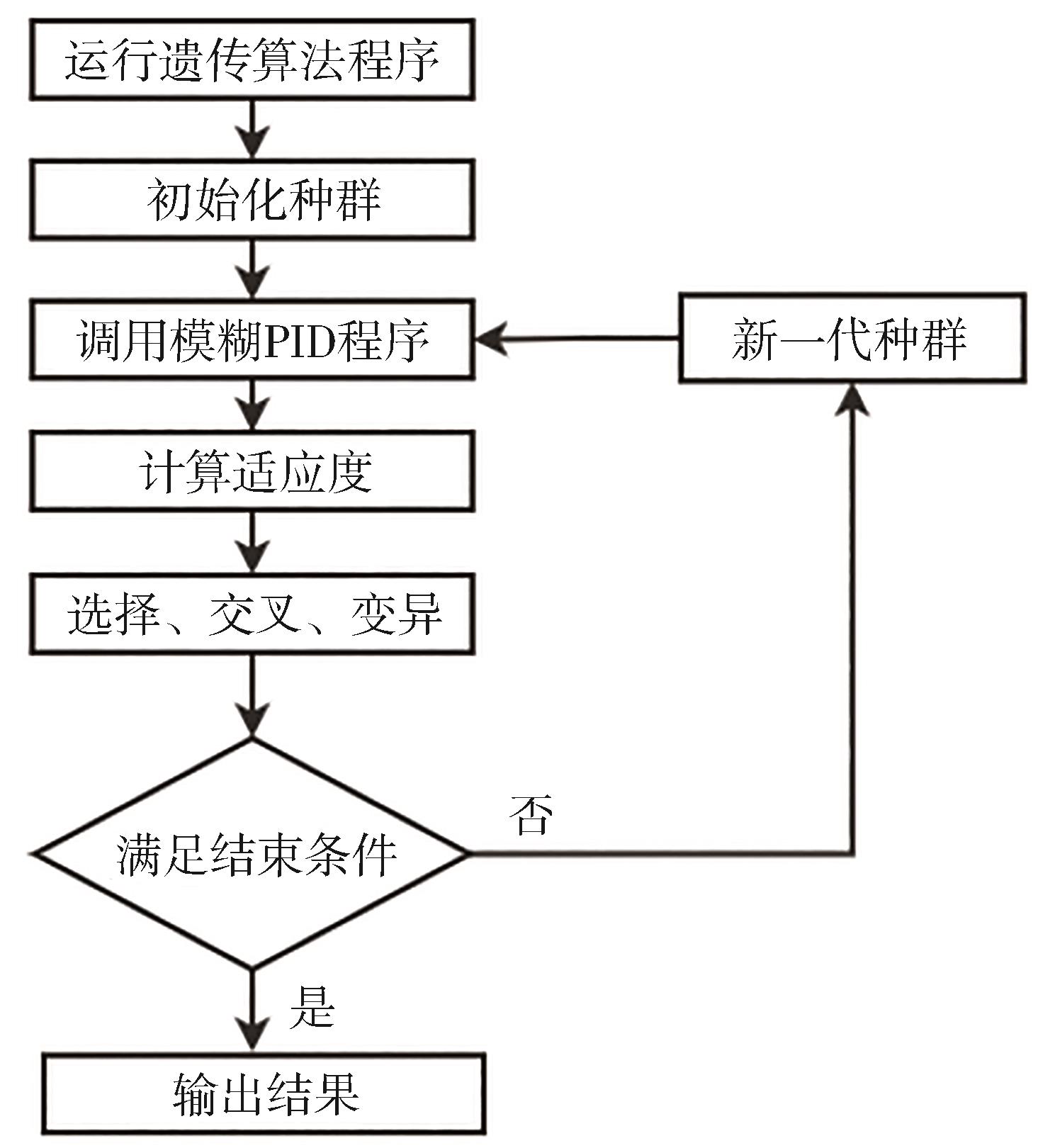

图11
遗传算法适应度"


图12
基于遗传算法优化的模糊PID控制框图"
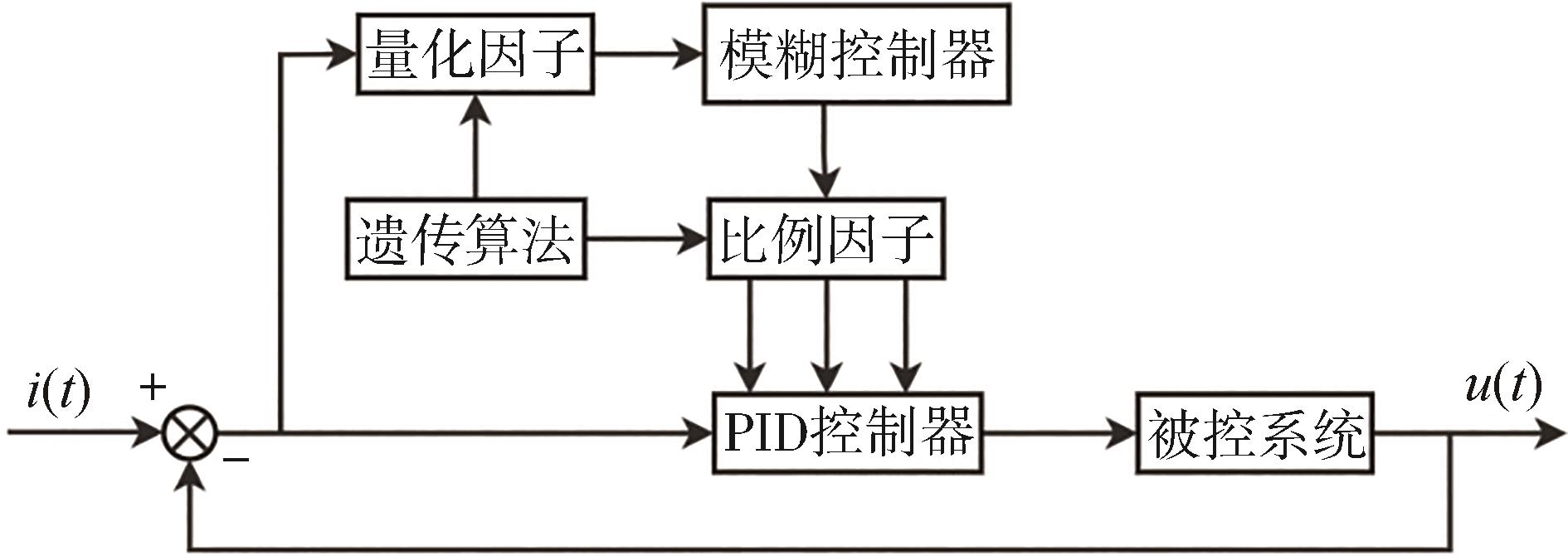
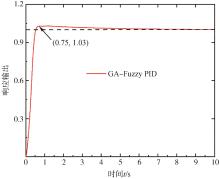
图13
GA-Fuzzy PID的单位阶跃响应仿真结果"

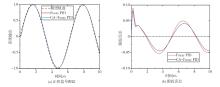
图14
磁流变制动器力矩跟踪仿真"

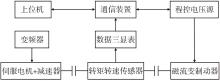
图15
磁流变制动器制动力矩控制实验系统"
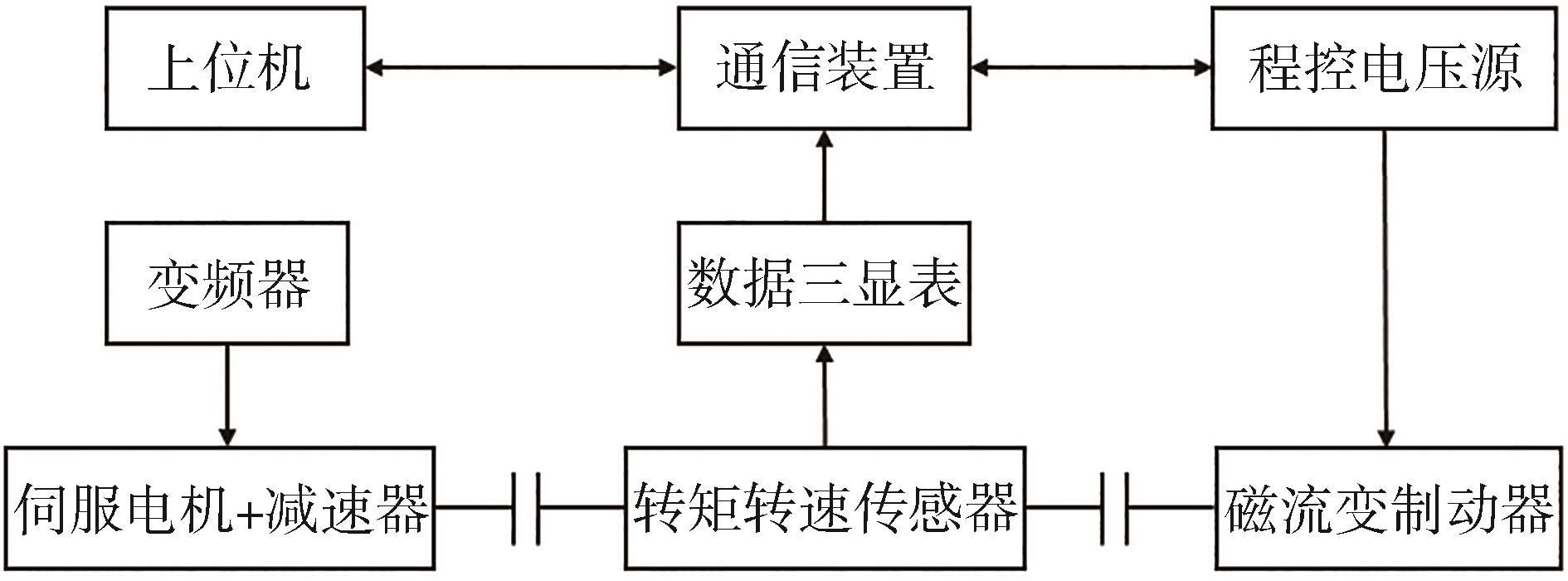
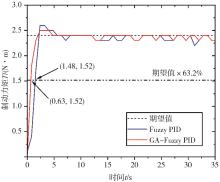
图16
GA-Fuzzy PID控制下的力矩阶跃响应实验结果"

图17
GA-Fuzzy PID控制下的力矩跟踪实验结果"

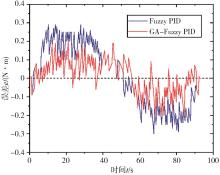
图18
制动力矩跟踪实验误差"

| 1 | PEI P, PENG Y. Constitutive modeling of magnetorheological fluids: a review[J]. Journal of Magnetism and Magnetic Materials, 2022, 550: 169076. |
| 2 | 郑祥盘,王程. 基于磁流变和电涡流效应的汽车新型缓速器的设计与试验[J]. 汽车工程, 2019, 41(8): 975-981. |
| ZHENG X P, WANG C. Design and test of novel vehicle retarder based on magnetorheological and eddy-current effects[J]. Automotive Engineering, 2019, 41(8): 975-981. | |
| 3 | SHIAO Y, KANTIPUDI M B. High torque density magnetorheological brake with multipole dual disc construction[J]. Smart Materials and Structures, 2022, 31(4): 45022. |
| 4 | 吴杰,蒋学争,姚进,等. 新型双层多线圈磁流变制动器研究[J]. 四川大学学报(工程科学版), 2016, 48(5): 201-209. |
| WU J, JIANG X Z, YAO J, et al. Research on a novel double layer multi coil magnetorheological brake[J]. Advanced Engineering Sciences,2016,48(5):201-209. | |
| 5 | WELLBORN P, MITCHELL J, PIEPER N, et al. Design and analysis of a small-scale magnetorheological brake[J]. IEEE/ASME Transactions on Mechatronics, 2022, 27(5): 3099-3109. |
| 6 | CARLSON J D, CATANZARITE D M, St. CLAIR K A. Commercial magneto-rheological fluid devices[J]. International Journal of Modern Physics B,1996,10(23-24): 2857-2865. |
| 7 | LI W H, DU H. Design and experimental evaluation of a MR brake[J]. The International Journal of Advanced Manufacturing Technology, 2003, 21(7): 508-515. |
| 8 | KARAKOC K, PARK E J, SULEMAN A. Design considerations for an automotive MR brake[J]. Mechatronics, 2008, 18(8):434-447. |
| 9 | KIKUCHI T, KOBAYASHI K. Design and development of cylindrical mr fluid brake with multi-coil structure[J]. Journal of System Design and Dynamics, 2011, 5(7):1471-1484. |
| 10 | WILEY B, GUROCAK H. Magneto-rheological actuator with permanent magnets for low-power activation[J]. Journal of Intelligent Material Systems and Structures, 2020, 31(6): 801-817. |
| 11 | 胡国良,李林森.多液流通道旋转式磁流变制动器结构设计及优化[J].现代制造工程,2019(12):145-153. |
| HU G L, LI L S. Structure design and optimization of rotary magnetorheological brake with multi-fluid flow channels[J]. Modern Manufacturing Engineering, 2019(12):145-153. | |
| 12 | 陈松,蔡天伍,黄金,等.考虑偏心挤压的磁流变制动器制动性能分析与优化[J].机械传动,2022,46(6):95-101. |
| CHEN S, CAI T W, HUANG J, et al. Research and optimization on performance of magnetorheological brake in consideration of eccentricity compression[J]. Journal of Mechanical Transmission, 2022, 46(6): 95-101. | |
| 13 | 邓兵兵,吴杰,黄禹铭,等.线圈参数对多极式磁流变制动器性能的影响[J].磁性材料及器件,2022,53(4):75-80. |
| DENG B B, WU J, HUANG Y M, et al. Influence of coil parameters on performance of multipole magnetorheological brake[J]. Journal of Magnetic Materials and Devices, 2022,53(4):75-80. | |
| 14 | 黄浩,吴杰,邓兵兵,等. 多极圆盘式磁流变制动器的设计与优化[J]. 工程设计学报, 2023, 30(3): 297-305. |
| HUANG H, WU J, DENG B B, et al. Design and optimization of multipole disc-type magnetorheological brake[J]. Chinese Journal of Engineering Design, 2023, 30(3): 297-305. | |
| 15 | CHEN J Z, LIAO W H. Design, testing and control of a MR actuator for assistive knee braces[J]. Smart Materials & Structures, 2010, 19(3):035029. |
| 16 | LI W, YADMELLAT P, KERMANI M R. Linearized torque actuation using FPGA-controlled magnetorheological actuators[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(2): 696-704. |
| 17 | ADIPUTRA D, UBAIDILLAH U, MAZLAN S A, et al. Fuzzy logic control for ankle foot orthoses equipped with MR brake[J]. Jurnal Teknologi, 2016, 78(11). |
| 18 | SHAMIEH H, SEDAGHATI R. Multi-objective design optimization and control of mr fluid brakes for automotive applications[J]. Smart Material Structures, 2017, 26(12):125012. |
| 19 | WANG N, WANG S, PENG Z, et al. Braking control performances of a disk-type magneto-rheological brake via hardware-in-the-loop simulation[J]. Journal of Intelligent Material Systems and Structures, 2018, 29(20): 3937-3948. |
| 20 | SOHN J, GANG H, CHOI Seung-Bok. An experimental study on torque characteristics of MR brake with modified magnetic core shape[J]. Advances in Mechanical Engineering, 2018,10(1):1-8. |
| 21 | WANG H Y, CHENG B, ZHANG Y J, et al. Transient behavior of compressed MR brake excited by step currents[J]. Scientific Reports, 2021,11(9):12193. |
| 22 | HUA D Z, LIU X H, GUPTA M K, et al. A new combined braking approach of MR fluids brake based on fuzzy controller and improved PID controller[J]. Proceedings of the Institution of Mechanical Engineers, Part C. Journal of Mechanical Engineering Science, 2021, 235 (23): 6644-6658. |
| 23 | 申玉良,杨绍普,刘旭东.发动机冷却风扇磁流变液离合器控制系统研究[J].工程机械,2006(2):23-25,1. |
| SHEN Y L, YANG S P, LIU X D. Research on control system of magneto-rheological fluid clutch of engine fan[J]. Construction Machinery and Equipment, 2006(2):23-25,1. | |
| 24 | 熊光洁,张元培,都俊超.基于MATLAB的磁流变液制动器的模糊控制建模研究[J].起重运输机械,2008(4):49-52. |
| XIONG G J, ZHANG Y P, DU J C. Research on fuzzy control modeling of magnetorheological fluid brakes based on MATLAB[J]. Hoisting and Conveying Machinery, 2008(4):49-52. | |
| 25 | 王志伟,李忠利,郭志军,等.磁流变液制动器试验台架控制系统仿真设计[J].中国农机化学报,2015,36(3):207-211. |
| WANG Z W, LI Z L, GUO Z J, et al. Simulation design of test bench control system for MRF brake[J]. Journal of Chinese Agricultural Mechanism, 2015, 36 (3): 207-211. | |
| 26 | 王利锋,路和,龚小祥.基于LabVIEW的磁流变液传动装置速度控制技术分析[J].机械设计与研究,2018,34(3):50-53,62. |
| WANG L F, LU H, GONG X X. Research on speed control technology of magnetorheological fluids transmission device based on LabVIEW[J]. Machine Design & Research, 2018,34(3):50-53,62. | |
| 27 | 宋万里,王思元,胡志超,等.基于制动控制器的磁流变制动器性能[J].东北大学学报(自然科学版),2019,40(3):375-379,385. |
| SONG W L, WANG S Y, HU Z C, et al. Performance of magneto-rheological brake based on braking controller[J]. Machine Design & Research, 2019,40(3):375-379,385. | |
| 28 | 余建军,蔡世波,胥芳,等.基于分数阶PID算法的磁流变液柔顺关节控制研究[J].计算机集成制造系统,2020,26(2):393-401. |
| YU J J, CAI S B, XU F, et al. Compliant joint control of magneto-rheological fluid based on fractional-order PID algorithm[J]. Computer Integrated Manufacturing Systems, 2020,26(2):393-401. | |
| 29 | 王书友. 磁流变离合器传动特性建模与控制技术研究[D].北京: 中国矿业大学,2022. |
| WANG S Y. Research on the transmission properties modeling and control technology of MR clutch[D]. Beijing: China University of Mining and Technology, 2022. | |
| 30 | 黄禹铭. 双线圈多筒式磁流变制动器设计、分析与实验研究[D]. 成都: 西华大学, 2022. |
| HUANG Y M. Design, analysis and experimental study of a dual-coil multi-drum MR brake[D]. Chengdu: Xihua University, 2022. | |
| 31 | 张辉,吴杰,唐绍禹, 等. 基于PID的双线圈侧置式磁流变制动器控制研究[J]. 制造技术与机床, 2022(12): 102-106. |
| ZHANG H, WU J, TANG S Y, et al. PID-based control of a dual coil side-mounted magnetorheological brake[J]. Machine Design & Research, 2022(12): 102-106. | |
| 32 | WU J, DENG B B, HUANG Y M, et al. A multi-pole magnetorheological clutch powered by permanent magnets and excitation coils[J]. Journal of Intelligent Material Systems and Structures, 2023, 34(2): 217-228. |
| 33 | 童静.磁流变阻尼器动态响应特性及其长期静置影响研究[D]. 重庆:重庆大学,2010. |
| TONG J. Study on dynamic response and quiescence impact of magnetorheological damper[D]. Chongqing: Chongqing University, 2010. | |
| 34 | 王道明. 大功率磁流变传动技术及温度效应研究[D]. 北京: 中国矿业大学, 2014. |
| WANG D M. Research on high-power magnetorheological transmission technology and temperature effect[D]. Beijing: China University of Mining and Technology, 2014. |
| [1] | 张旭东, 温雅, 邹渊, 孙文景, 张兆龙, 唐风敏, 刘卫国. 面向车载时间敏感网络的流量调度策略及改进算法研究[J]. 汽车工程, 2024, 46(1): 75-83. |
| [2] | 袁新杰,刘芳,侯中军. 基于GA-PSO-Otsu算法的质子交换膜燃料电池催化层孔结构自适应识别[J]. 汽车工程, 2023, 45(9): 1702-1709. |
| [3] | 陈国强,申正义,孙利,支梦帆,李彤. 基于BP神经网络优化遗传算法的智能座舱感性意象预测[J]. 汽车工程, 2023, 45(8): 1479-1488. |
| [4] | 李兆宗,张硕,张承宁. 基于遗传算法的车用轴向磁通电机温度模型优化[J]. 汽车工程, 2023, 45(4): 609-618. |
| [5] | 陈勇,魏长银,李晓宇,李彦林,刘彩霞,林霄喆. 融合工况识别的增程式电动汽车模糊能量管理策略研究[J]. 汽车工程, 2022, 44(4): 514-524. |
| [6] | 张家旭,王晨,郭崇,滕飞,李东燃. 基于自适应神经模糊推理系统的平行泊车路径规划[J]. 汽车工程, 2021, 43(3): 323-329. |
| [7] | 王成铭,范颖,邹冬华,王金明,李正东,陈忆九,仲梁维. 基于遗传算法的高精度事故重建与损伤分析[J]. 汽车工程, 2021, 43(12): 1787-1792. |
| [8] | 葛如海, 崔义忠, 洪亮, 肖轩. 基于NSGA-Ⅱ的主动式安全气囊参数优化*[J]. 汽车工程, 2020, 42(9): 1216-1223. |
| [9] | 魏彤辉, 左文杰, 郑宏伟, 李锋. 基于降维算法的车身可靠性优化*[J]. 汽车工程, 2020, 42(7): 941-948. |
| [10] | 曾发林, 胡枫. 基于声品质贡献因子的发动机悬置优化*[J]. 汽车工程, 2020, 42(5): 628-635. |
| [11] | 王国仰, 祁金柱, 刘世宇, 帅石金, 王志明. 基于多目标遗传算法的SCR系统氨覆盖率优化*[J]. 汽车工程, 2020, 42(3): 279-285. |
| [12] | 柯俊, 祖洪飞, 史文库. 基于有限元法及遗传算法的推力杆球铰多目标优化方法*[J]. 汽车工程, 2020, 42(2): 178-183. |
| [13] | 熊辉, 郭宇昂, 陈超义, 许庆, 李克强. 基于遗传优化与深度学习的交通信号灯检测*[J]. 汽车工程, 2019, 41(8): 960-966. |
| [14] | 周卫琪, 齐翔, 陈龙, 徐兴. 基于无迹卡尔曼滤波与遗传算法相结合的车辆状态估计*[J]. 汽车工程, 2019, 41(2): 198-205. |
| [15] | 周大为, 左曙光, 刘敬芳, 吴旭东. 燃料电池车用可调频微穿孔消声器试验研究*[J]. 汽车工程, 2019, 41(1): 80-85. |
|
||