汽车工程 ›› 2025, Vol. 47 ›› Issue (5): 820-828.doi: 10.19562/j.chinasae.qcgc.2025.05.003
胡杰1,2,3( ),郑嘉辰1,2,3,周思龙1,2,3,赵文龙1,2,3,张志凌1,2,3,姚茂嘉1,2,3
),郑嘉辰1,2,3,周思龙1,2,3,赵文龙1,2,3,张志凌1,2,3,姚茂嘉1,2,3
Jie Hu1,2,3(),Jiachen Zheng1,2,3,Silong Zhou1,2,3,Wenlong Zhao1,2,3,Zhiling Zhang1,2,3,Maojia Yao1,2,3
摘要:
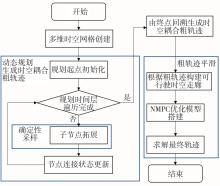
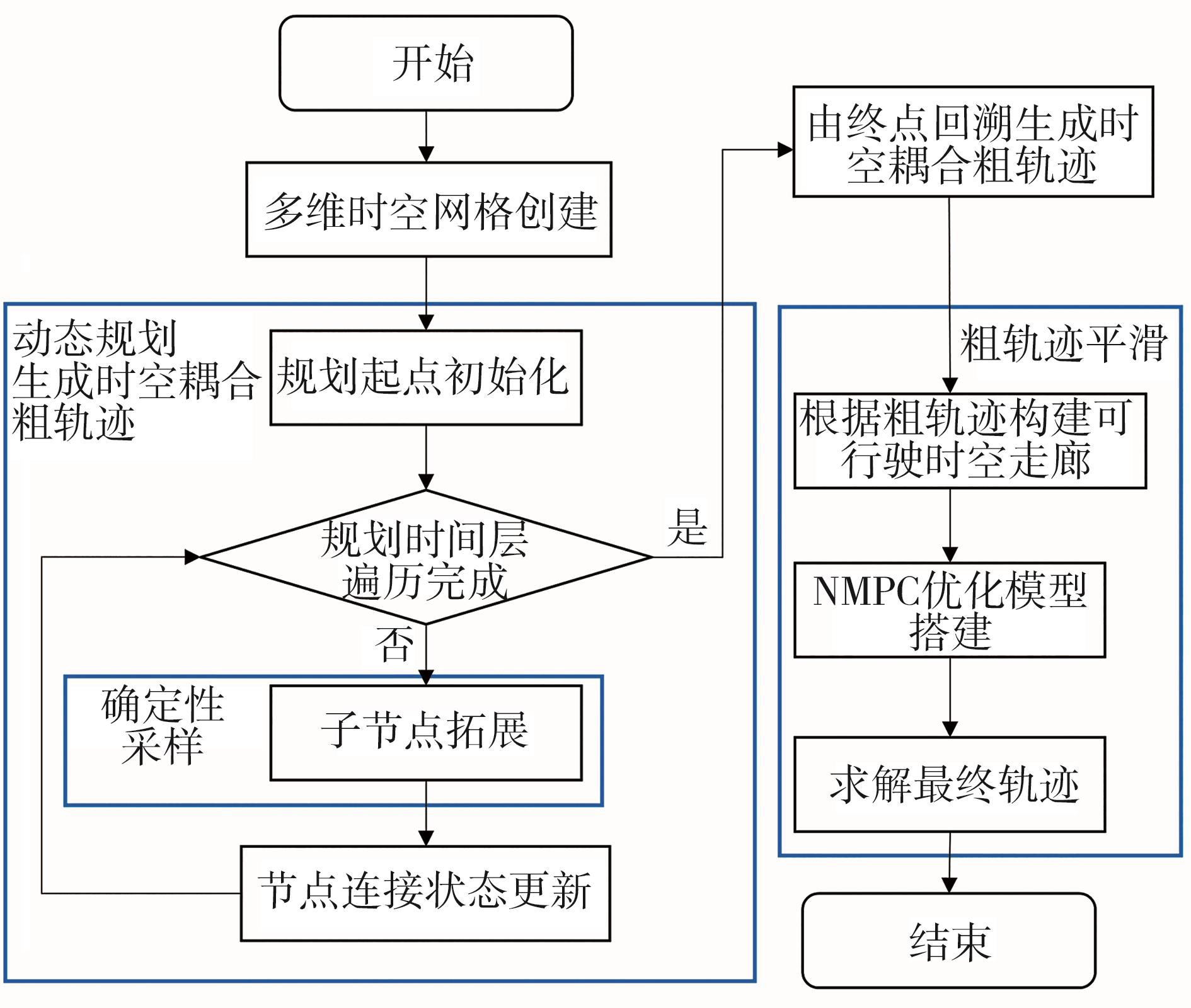
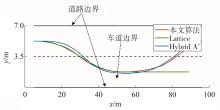
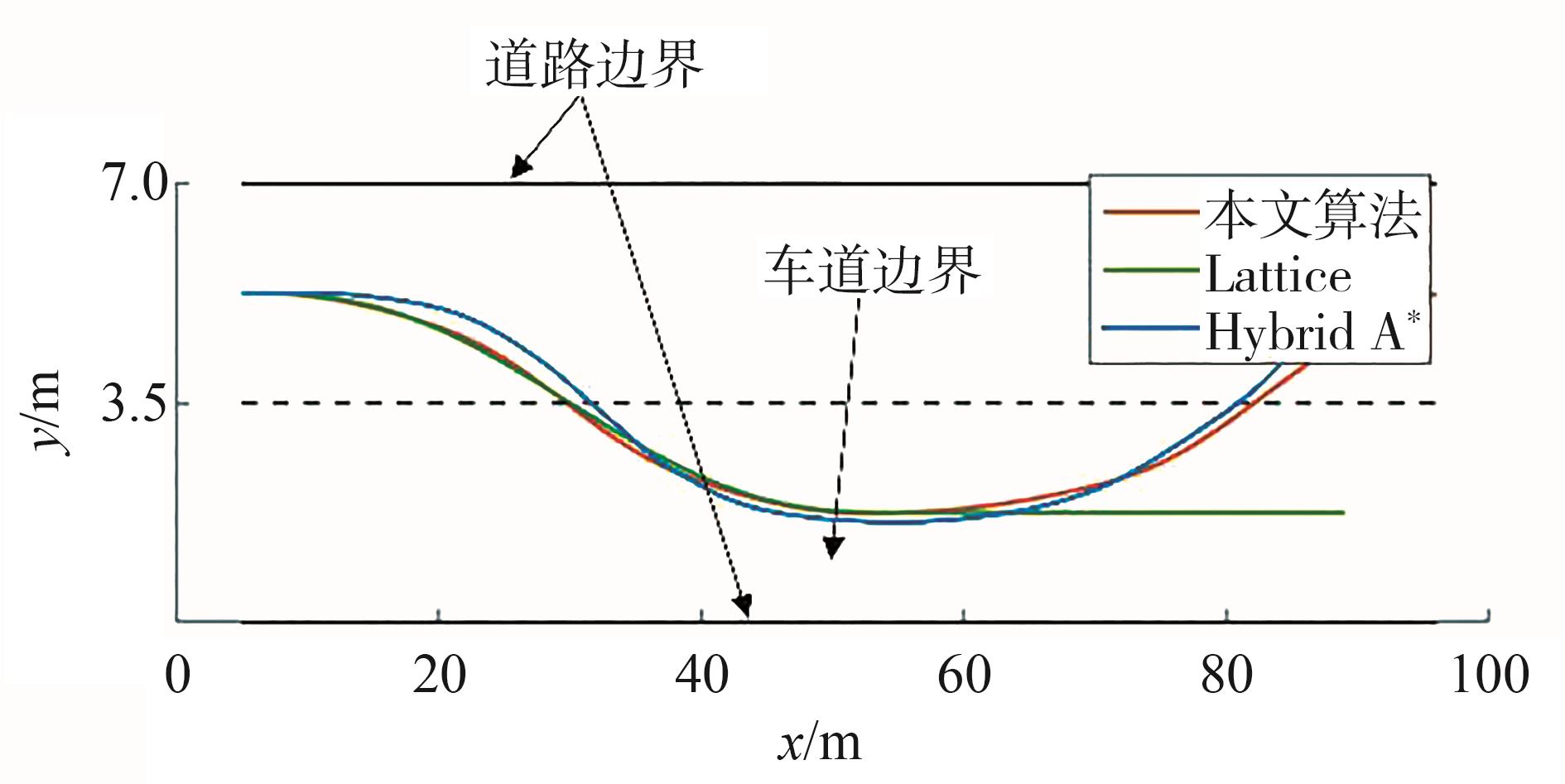
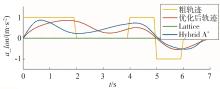
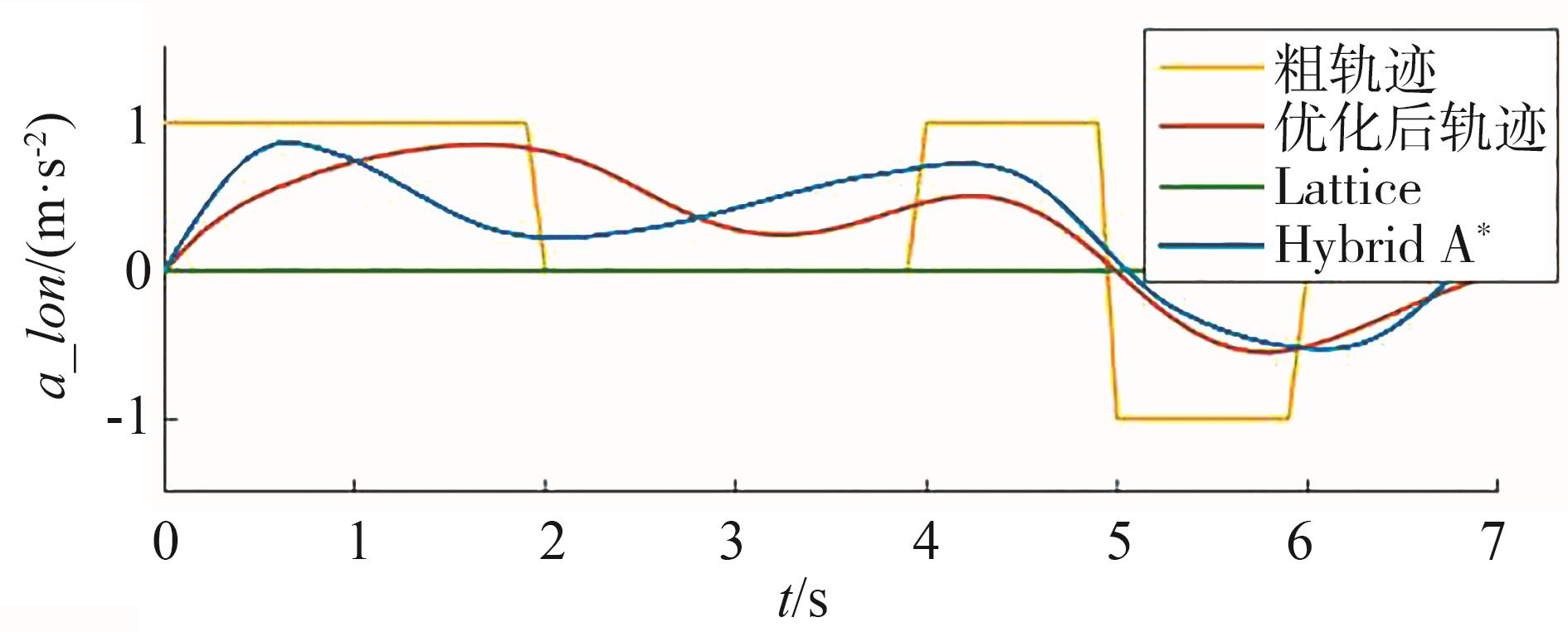
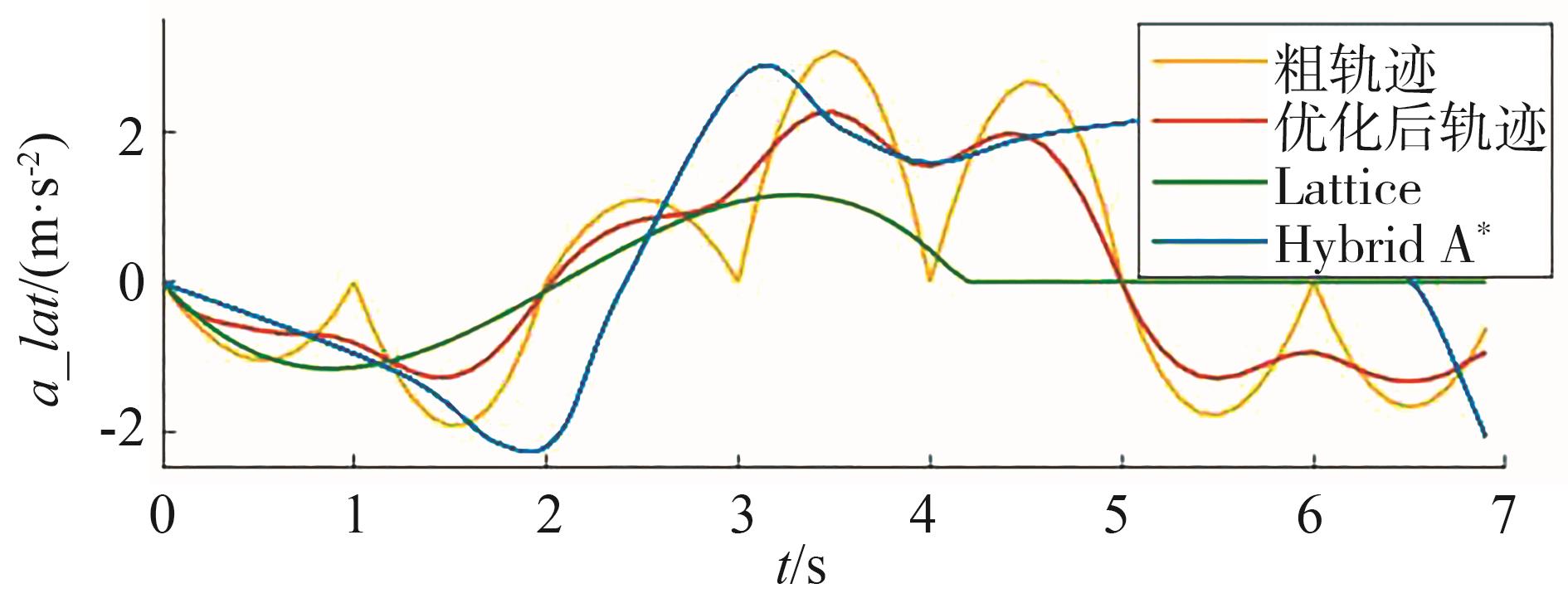
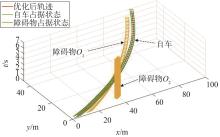
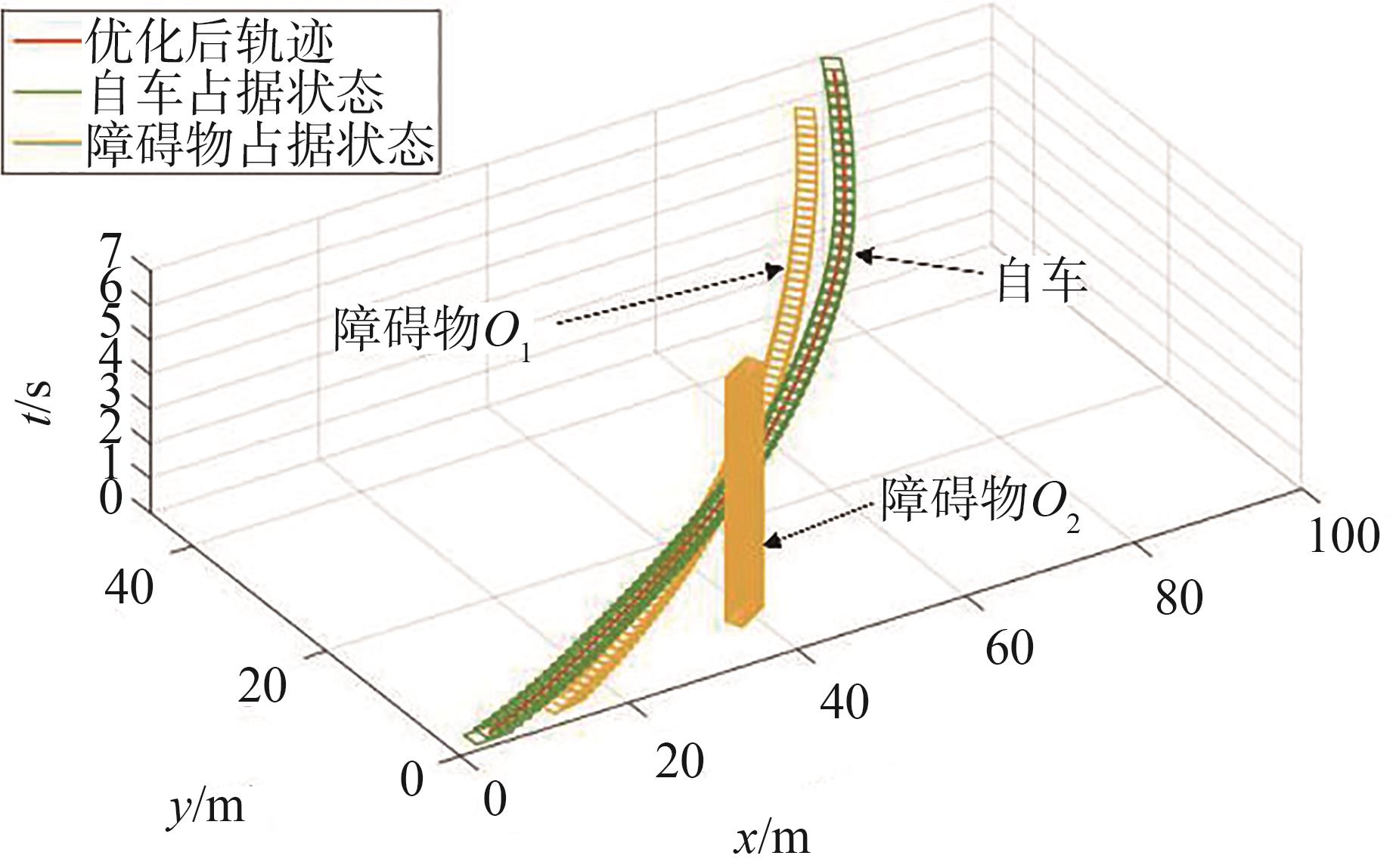
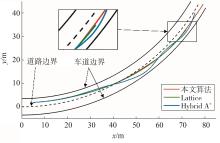
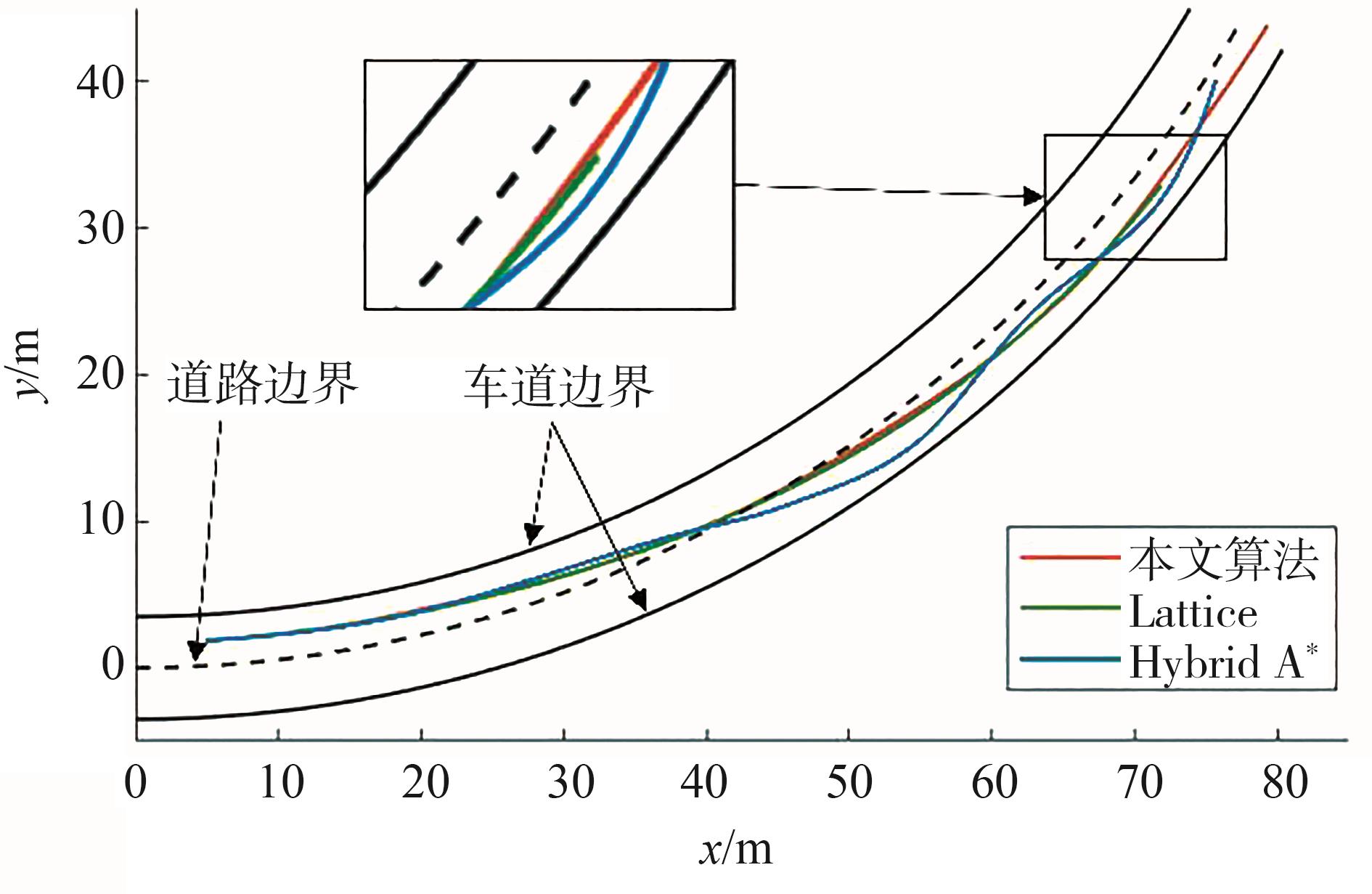
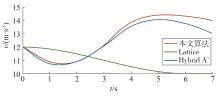
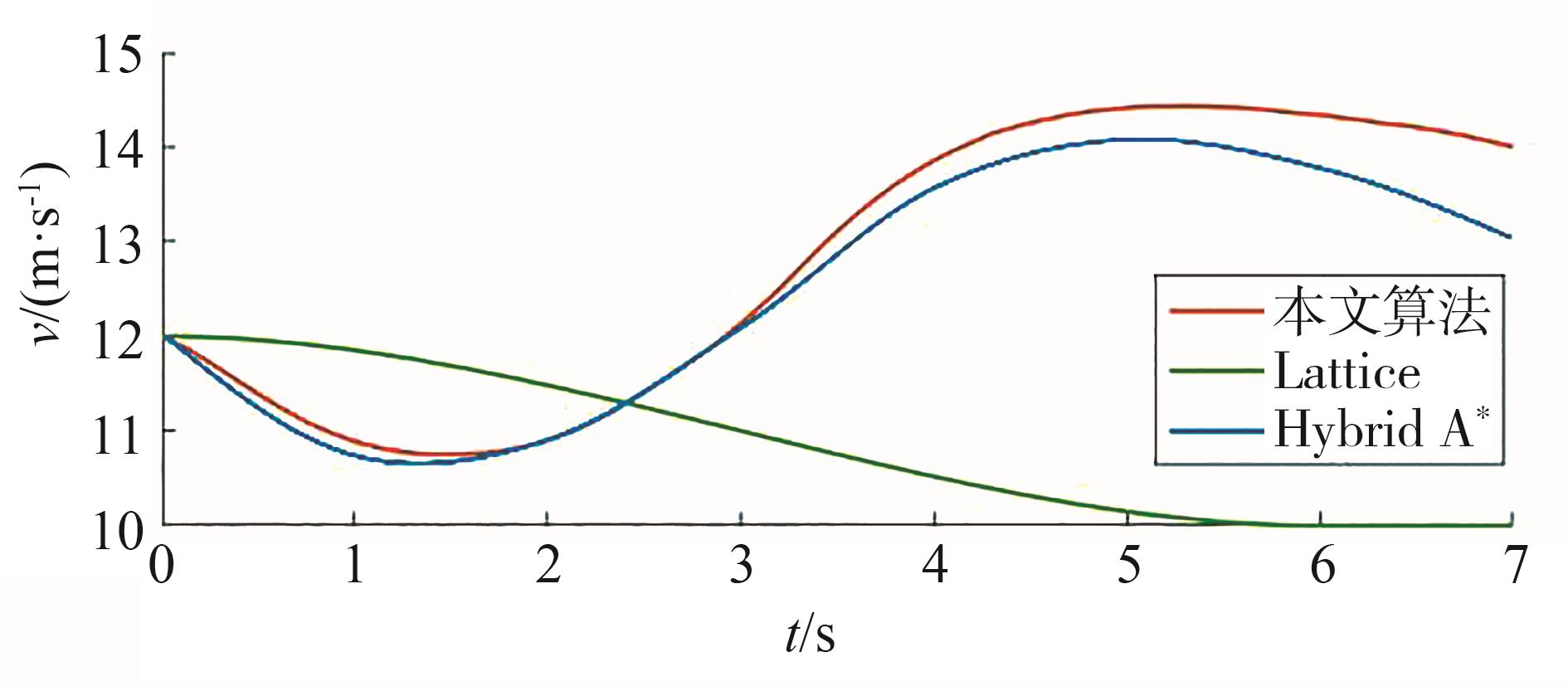
针对自动驾驶汽车所应用的时空分离轨迹规划方法易导致车辆灵活性不足,甚至无法在复杂工况下规划出可行轨迹,而现有时空联合轨迹规划方法难以满足结构化道路应用要求的问题,本文提出了一种基于动态规划与数值优化算法的时空联合规划方法。首先,在Frenet坐标系下使用动态规划算法生成时空耦合粗轨迹,过程中采用确定性采样法进行子节点拓展。然后,以粗轨迹为参考在笛卡尔坐标系下构建可行驶时空走廊,建立NMPC优化模型求解最终轨迹。最后,通过仿真验证算法有效性,结果表明,所提出的方法对结构化道路的适应性良好,相较于其他时空联合规划算法,能够更好地平衡通行效率、轨迹舒适性、算法实时性的要求。