Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (4): 518-526.doi: 10.19562/j.chinasae.qcgc.2021.04.009
Previous Articles Next Articles
Hongqing Tian,Feng Ding,Xunjia Zheng,Heye Huang,Jianqiang Wang( )
)
Received:2020-04-08
Revised:2020-08-20
Online:2021-04-25
Published:2021-04-23
Contact:
Jianqiang Wang
E-mail:wjqlws@tsinghua.edu.cn
Hongqing Tian,Feng Ding,Xunjia Zheng,Heye Huang,Jianqiang Wang. Motion Planning Based on Virtual Force of Potential Field for Intelligent Connected Vehicles[J].Automotive Engineering, 2021, 43(4): 518-526.

"
"
"

"
"
"

"

"

"
"

"
| 仿真参数 | 数值 |
|---|---|
| 整车质量/kg | 1 600 |
| 前车车速/(m?s-1) | 24 |
| 自车车速/(m?s-1) | 26/28/30/32/34/36 |
| 初始车距/m | 60 |
| 采样时间/s | 0.1 |
"

"
"
"
| 仿真参数 | 数值 |
|---|---|
| 前车车速/(m?s-1) | 20 |
| 自车车速/(m?s-1) | 22/24/26/28/30/32 |
| 初始车距/m | 60 |
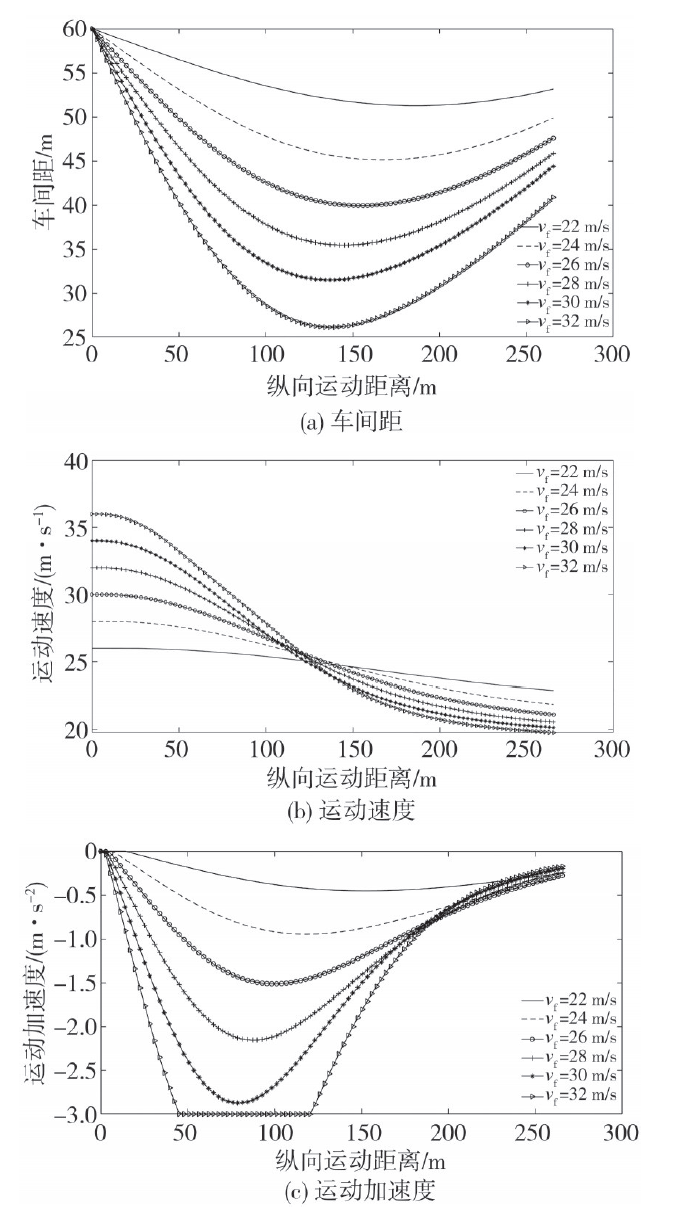
"

"
| 初速度/(m?s-1) | 最小车距/m | 最大曲率/(10-4?m-1) | 最大横向加速度/(m?s-2) | 车辆最大转角/(o) |
|---|---|---|---|---|
| 22 | 51.2 | 2.083 | 0.23 | 2.07 |
| 24 | 45.1 | 2.083 | 0.23 | 2.07 |
| 26 | 39.9 | 2.080 | 0.28 | 2.22 |
| 28 | 35.4 | 2.067 | 0.51 | 2.70 |
| 30 | 31.4 | 2.050 | 0.81 | 3.11 |
| 32 | 26.6 | 2.025 | 1.22 | 3.48 |
"
| 1 | 李克强,戴一凡,李升波,等.智能网联汽车(ICV)技术的发展现状及趋势[J].汽车安全与节能学报,2017,8(1):1-14. |
| LI K Q, DAI Y F, LI S B, et al. State⁃of⁃the⁃art and technical trends of intelligent and connected vehicles[J]. Automotive Safety and Energy,2017,8(1):1-14. | |
| 2 | 李爱娟,李舜酩,李殿荣.智能车运动轨迹规划中的关键技术研究现状[J].机械科学与技术,2013,32(7):1022-1026. |
| LI A J, LI S M, LI D R. On the trajectory planning’s key techno⁃logies for intelligent vehicle[J]. Mechanical Science and Techno⁃logy for Aerospace Engineering, 2013,32(7):1022-1026. | |
| 3 | HURDUS J, BACHA A,BAUMAN C, et al. The victortango architecture for autonomous navigation in the DARPA urban challenge[J]. Journal of Aerospace Computing Information & Communication, 2008,5(12):506-529. |
| 4 | MECHIOR P, ORSONI B, LAVIALLE O. Consideration of obstacle danger level in path planning using A* and fast marching optimisation: comparative study[J]. Signal Processing, 2003,83(11):2387-2396. |
| 5 | LAVALLE S M, KUFFNER J. Rapidly⁃exploring random trees: progress and prospects[J]. Algorithmic and Computational Robo⁃tics: New Directions, 2001:293-308. |
| 6 | PETROV P, NASHASHIBI F. Modeling and nonlinear adaptive control for autonomous vehicle overtaking[J]. IEEE Transactions on Intelligent Transportation Systems,2014,15(4):1643-1656. |
| 7 | HU X, CHEN L, TANG B. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles[J]. Mechanical Systems and Signal Processing,2018,100(2):482-500. |
| 8 | 冀杰,姬鹏,彭和.面向车辆主动避撞的三维虚拟危险势能场设计[J].汽车工程,2016,38(9):1065-1071,1079. |
| JI J, JI P, PENG H. Design of 3D virtual dangerous potential field for vehicle active collision avoidance[J]. Automotive Engineering,2016,38(9):1065-1071,1079. | |
| 9 | 修彩靖,陈慧.基于改进人工势场法的无人驾驶车辆局部路径规划的研究[J].汽车工程,2013,35(9):808-811. |
| XIU C J, CHEN H. A research on localpath planning for autonomous vehicles based on improved APF method[J]. Automotive Engineering, 2013,35(9):808-811. | |
| 10 | GONZALEZ D, PEREZ J, MILANES V. A review of motion planning techniques for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems,2016,17(4):1135-1145. |
| 11 | GE S, CUI Y J. Dynamic motion planning for mobile robots using potential field method[J]. Autonomous Robots,2002,13(3): 207-222. |
| 12 | MELCHIOR P, METOUI B, POTY A. Attractive force based on fractional potential in dynamic motion planning for mobile robot[C]. ASME 2007 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers Digital Collection,2007:1423-1430. |
| 13 | MELCHIOR P, ORSONI B, OUSTALOUP A. Weyl fractional potential in path planning[C]. European Control Conference (ECC),2015:1758-1763. |
| 14 | MOREAU J, MELCHIOR P, VICTOR S. Path planning with fractional potential fields for autonomous vehicles[J]. IFAC⁃Papers OnLine,2017,50(1):14533-14538. |
| 15 | 侯德藻,刘刚,高锋,等.新型汽车主动避撞安全距离模型[J].汽车工程,2005,27(2):186-190. |
| HOU D Z , LIU G, GAO F, et al. A new safety distance model for vehicle collision avoidance[J]. Automotive Engineering,2005,27(2):186-190. | |
| 16 | DING J, DANG R, WANG J. Driver intention recognition me⁃thod based on comprehensive lane⁃change environment assessment[C]. 2014 IEEE Intelligent Vehicles Symposium Proceedings,2014:214-220. |
| 17 | 任玥,郑玲,张巍,等.基于模型预测控制的智能车辆主动避撞控制研究[J].汽车工程,2019,41(4):404-410. |
| REN Y, ZHENG L, ZHANG W, et al. A study on active collision avoidance control of autonomous vehicles based on model predictive control[J]. Automotive Engineering, 2019,41(4):404-410. | |
| 18 | KRAJEWSKI R, BOCK J, KLOEKER L. The highD dataset: a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC),2018:2118-2125. |
| [1] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [2] | Pangwei Wang,Cheng Liu,Yunfeng Wang,Mingfang Zhang. Multi-lane Trajectory Optimization for Intelligent Connected Vehicles in Urban Road Network [J]. Automotive Engineering, 2024, 46(2): 241-252. |
| [3] | Siyu Wu,Wenhao Yu,Xingyu Xing,Yuxin Zhang,Chuzhao Li,Xueke Li,Xinyu Gu,Yunwei Li,Xiaohan Ma,Wei Lu,Zheng Wang,Zhenmao Hao,Hong Wang,Jun Li. Methodology of Critical Scenarios-Based Dual-Loop Testing and Verification for Safety of the Intended Functionality [J]. Automotive Engineering, 2023, 45(9): 1583-1607. |
| [4] | Zheng Zuo,Yunpeng Wang,Bin Ma,Bosong Zou,Yaoguang Cao,Shichun Yang. Quantitative Evaluation and Analysis of On-board Network Components Risk Rate Based on AFC-TARA [J]. Automotive Engineering, 2023, 45(9): 1553-1562. |
| [5] | Weiguo Liu,Zhiyu Xiang,Rui Liu,Guodong Li,Zixu Wang. Research on End-to-End Vehicle Motion Planning Method Based on Deep Learning [J]. Automotive Engineering, 2023, 45(8): 1343-1352. |
| [6] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [7] | Wei Ran,Hui Chen,Jiaxin Yang,Nishimura Yosuke,Chaopeng Guo,Youyu Yin. Design Method of Motion Planning Reward Function Based on Utility Theory [J]. Automotive Engineering, 2023, 45(8): 1373-1382. |
| [8] | Bing Zhu,Hongyi Jiang,Jian Zhao,Jiayi Han,Yanchen Liu. A Method for Dynamically Calculating and Evaluating the Trustworthiness of Collaborative Perception of Intelligent Connected Vehicles [J]. Automotive Engineering, 2023, 45(8): 1383-1391. |
| [9] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [10] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [11] | Haotian Liu,Hongqian Wei,Peicheng Shi,Youtong Zhang. The Masquerade Intrusion Detection Technique for Automotive ECUs Based on the Hybrid Feature Extraction of Frame Intervals and Bus Voltages [J]. Automotive Engineering, 2023, 45(11): 2070-2081. |
| [12] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
| [13] | Wenli Li,Kaiwen Xiao,Xiaohui Shi,Fenghua Liang,Ping Li. Pedestrian-Vehicle Micro-Interaction Model Based on Attention Field of Pedestrian Vision [J]. Automotive Engineering, 2022, 44(6): 808-820. |
| [14] | Pengfei Li,Yugong Luo,Chang Liu,Weiwei Kong. Control Strategies Design of Intelligent and Connected Vehicle Platoon Under Emergency Conditions [J]. Automotive Engineering, 2022, 44(3): 299-307. |
| [15] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |